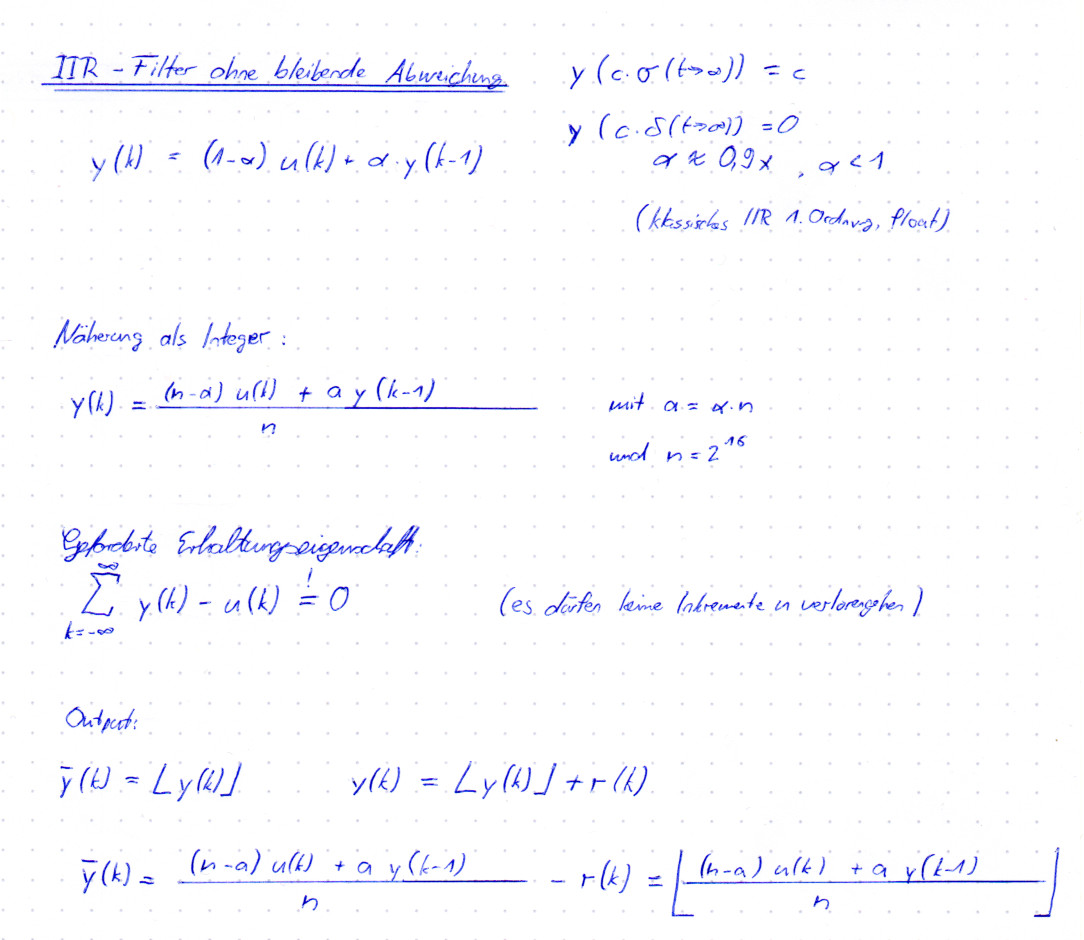
Hallo zusammen, ich will ein IIR-Filter erster Ordnung implementieren. Randbedingung ist, dass die Implementierung in Integer erfolgt, und dass das Ziel ist, dass sich der Rundungsfehler nicht akkumuliert, sondern sowohl der Fehler bei der Impulsantwort als auch bei der Sprungantwort dauerhaft verschwindet. Oder anders gesagt: Die Differenz zwischen der Summe der Eingangswerte und Ausgangswerte wächst nicht an. Jetzt habe ich allerdings gerade einen Knoten im Kopf, was die Formulierung des Fehlerterms angeht (siehe Anhang). Kann mir jemand einen Tipp geben?
Angehängte Dateien:
-

IIR_Integer_Fehlerterm.jpg
150 KB
Was soll der Fehlerterm bringen? Willst du das Ergebnis am Ende irgendwann einmal korrigieren? Der IIR soll doch sicher ein permanentes Ergebnis ausgeben.
Analogmann schrieb: > Was soll der Fehlerterm bringen? Willst du das Ergebnis am Ende > irgendwann einmal korrigieren? Solange der Erwartungswert für den Fehlertherm Null ist, braucht man nichts zu korrigieren und auch nicht bis zu irgendeinem Ende warten.
Wolfgang schrieb: > Solange der Erwartungswert für den Fehlertherm Null ist, braucht man > nichts zu korrigieren Mal sehen: Ohne Fehlerterm ist bei einem Einheitssprung als Eingang u(t<0) = 0, u(t>=0) = 1 und alpha = 0.9 ist die Summe über alle u(k) unendlich. Die Summe über alle y(k) ist Null. Also wächst der Fehler y-u ohne Fehlerterm gegen minus unendlich. Um einen Fehlerterm komme ich also nicht herum. Ich weiß nur gerade nicht, wie ich das richtig herleite.
1 | int filtIn = 0; |
2 | long filtLong = 0; |
3 | int filtOut = 0; |
4 | |
5 | |
6 | //Filter erster Ordnung:
|
7 | filtLong += (filtIn-filtOut); |
8 | filtOut = filtLong / 128; // Für Filterzeit: tau= 128 * Taskzeit |
Nachtrag: filtLong ist deshalb "long", weil die Werte um die Faktor Filterzeit, hier also 128 größer sind als die Ein-und Ausgangswerte
Walter T. schrieb: > Mal sehen: Ohne Fehlerterm ist bei einem Einheitssprung als Eingang > u(t<0) = 0, u(t>=0) = 1 und alpha = 0.9 ist die Summe über alle u(k) > unendlich. Die Summe über alle y(k) ist Null. dann musst du (würde ich so sehen) die u(k) auch skalieren. alpha skalierst du ja mit 2^16. bei Int ist der kleinste Schritt halt 1, probier das ganze mal mit 2^8 oder so als Sprung. Wenn du bei Float den Sprung klein genug machst verschwindet der auch wieder durch Rundungsfehler. niemand würde erwarten dass ein Filter mit Float einen Sprung von 0.0000...x verarbeiten kann. selbst wenn deine Fehlerkorrektur funktioniert, ist u(k) = y(k + zeit bis fehlerkorrektur greift). damit gewinnst du nichts, du müsstest u (und damit y) anders quantisieren bzw. auch hoch skalieren.
Angehängte Dateien:
-

filterVergleich.png
12 KB
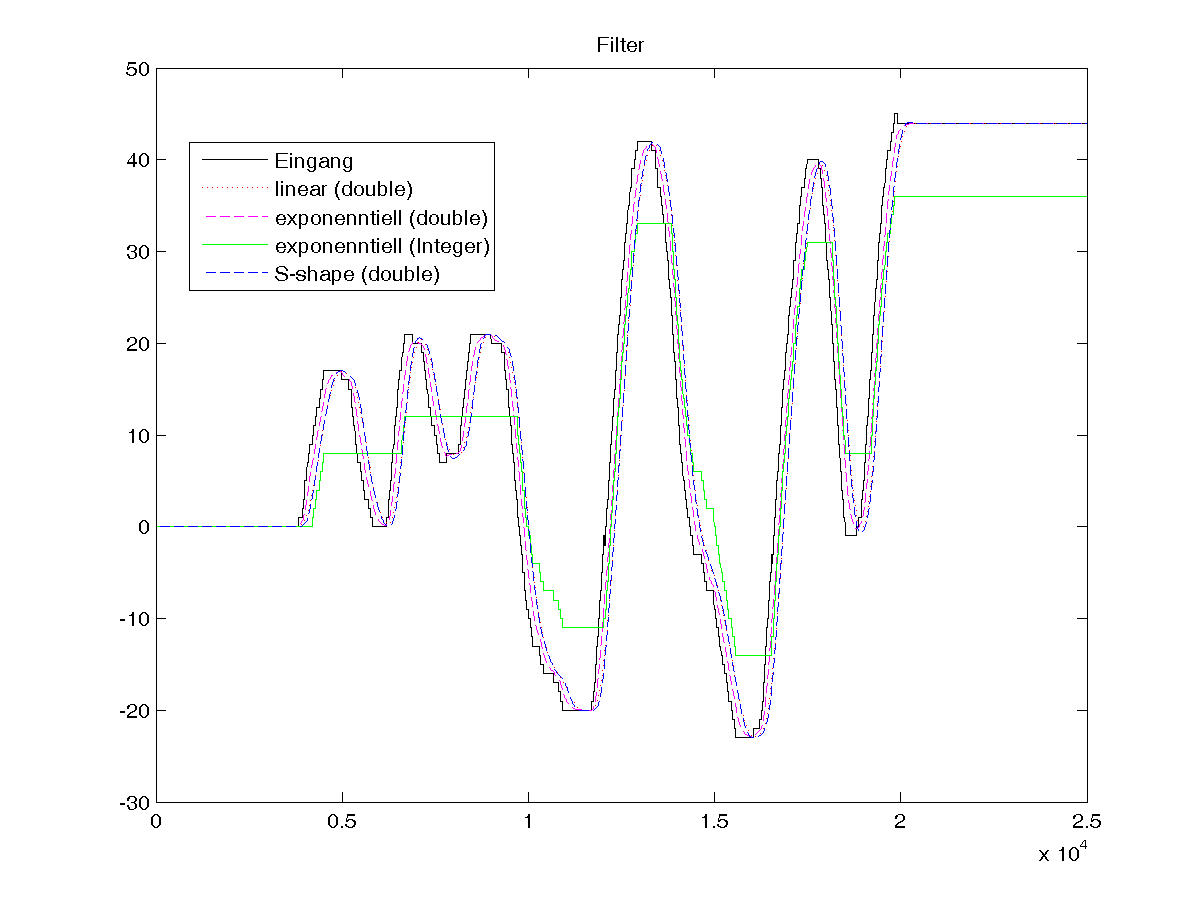
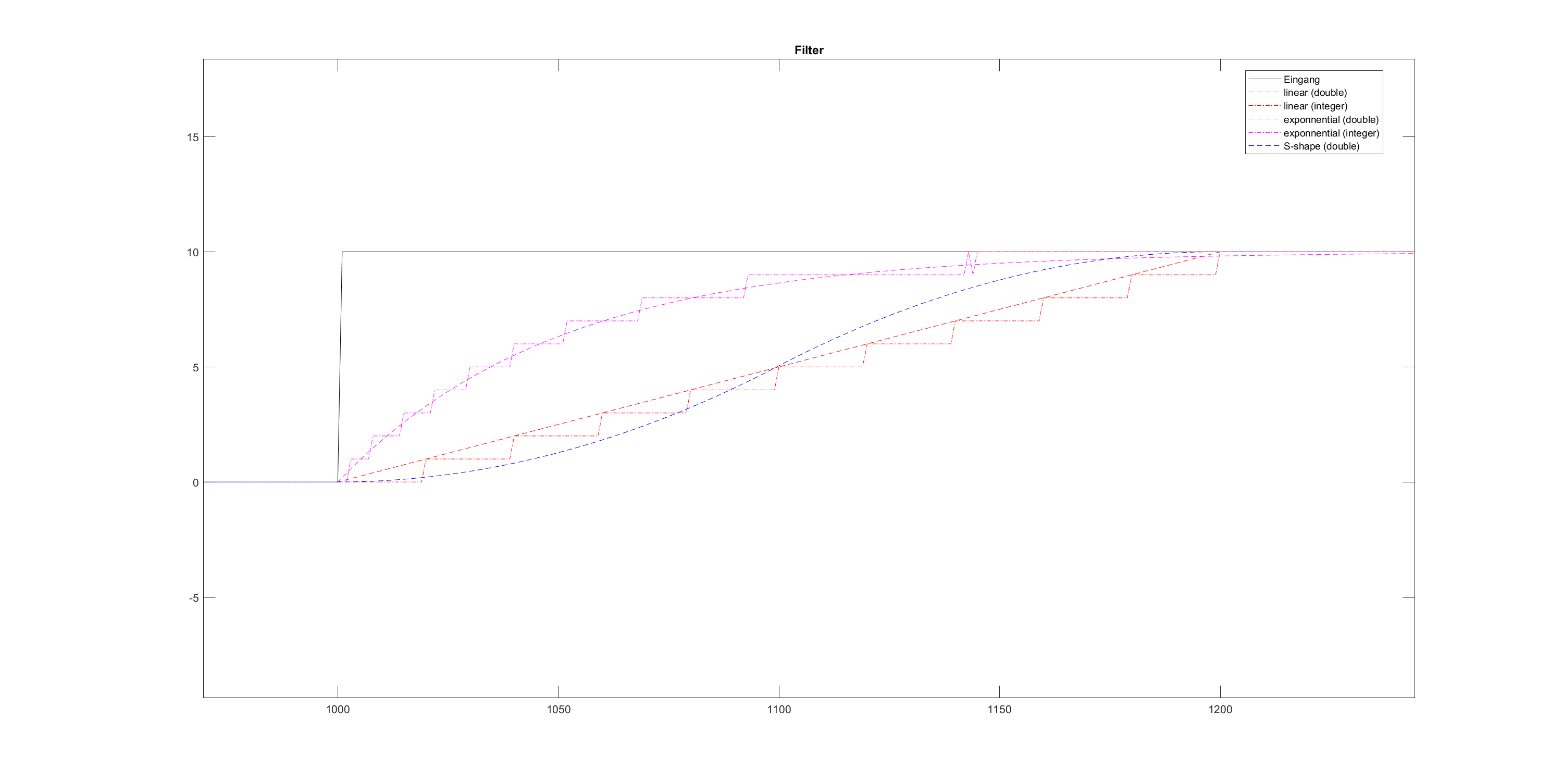
c-heater schrieb: > [...] Ja, so sah mein zweiter Ansatz auch aus. Der Nachteil an dieser Formulierung besteht darin, dass der Fehler für Summe(y(t)) immer noch maximal 128-1 (bei mir 20-1) ist. Irgendwie habe ich naiv erwartet, dass der Fehler auf Plusminus 1 zu bekommen ist. P.S.: Hoppla....bei den "exponnentiellen" Filtern (IIR 1. Ordnung) sind mir die "n" ein wenig verruscht.
Angehängte Dateien:
-

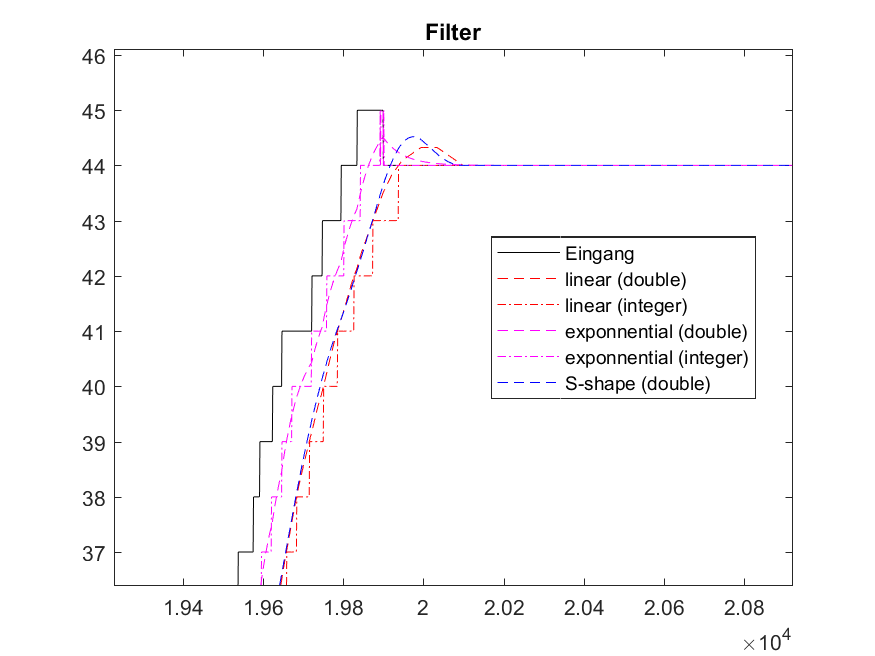
filter.png
43 KB
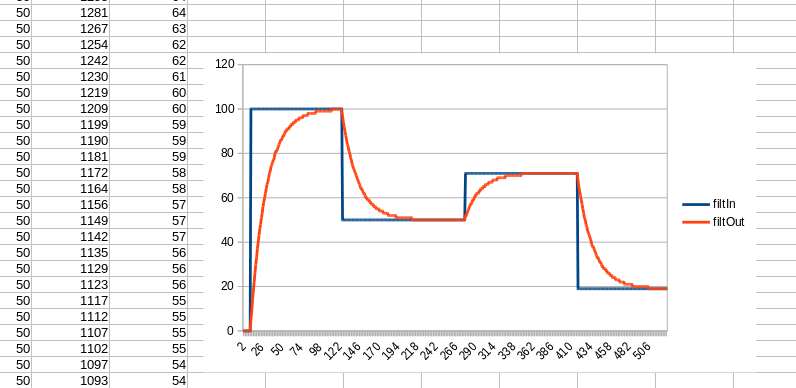
Hallo, nein, da entsteht kein Fehler. Das Filter läuft nach einer gewissen Zeit auf genau den Eingangswert. Hier als Bild und Tabelle das Beispiel mit Eingangswerten 0,100,50,71,19 und Filterzeit 20. Wobei in C sich Filterzeiten 16,32,64 anbieten, weil keine Division erforderlich ist.
Bei
1 | filtOut += (filtIn - filtOut) / 128; |
hättest Du allerdings das von Dir beschriebene Problem. Nicht aber, wenn Du die 2-zeilige Version von oben nimmst. Der Preis dafür ist allerdings eine zusätzliche Variable, die möglicherweise einen breiteren Datentyp erfordert.
c-heater schrieb: > Das Filter läuft nach einer gewissen Zeit > auf genau den Eingangswert. Das stimmt. Allerdings stimmen die Zwischenwerte nicht. Bei einem linearen Filter müsste bei den folgenden Varianten das gleiche Ergebnis herauskommen:
1 | deltaU = input(); |
2 | u += deltaU; |
3 | y0 += filterExp(deltaU, &Status0); |
4 | y1 = filterExp(u, &Status1); |
Bei den in double implementierten Filtern ist das auch so. Aber beim Integer-Filter ist noch der Wurm drin.
Walter T. schrieb: > Bei den in double implementierten Filtern ist das auch so. Aber beim > Integer-Filter ist noch der Wurm drin. wenn alpha >0.5 ist kommt der Integer Filter immer nur auf +-1 an den Sollwert, sowohl von oben als auch von unten. es ist halt nicht einfach und/oder gut bei einem Filter, der mit Bruchteilen des Eingangswertes arbeitet, die kleinste Quantisierung (bei Integer ist das halt 1) als signifikante Stelle zu benutzen. in float folgt auf die 1 die 1.0000001192092896 als nächste mögliche Zahl, berechne mal den Sprung in einem Filter nur in Float, da kommt auch nur Müll raus (da du hier die Zwischenberechnung mit 2^16 hochskalierst, müsste man dann fairerweise die Berechnung in Double machen und dann nur u(k) und y(k) wieder nach float konvertieren, ändert aber nichts daran, dass der Filter bei alpha>0.5 nicht springen wird => Fehler wird unendlich) nimm bei deinem ersten Ansatz statt u(k) mal u(k)*2^8, speicher y(k) so wie es aus der Formel kommt für den nächsten Schritt (für y(k-1)), und nimm dann nur für die Ausgabe y(k)/2^8. die 2^8 kannst du relativ beliebig variieren. dann funktioniert der Filter problemlos ohne jeglichen Fehler.
Die einfachste Möglichkeit, das Problem zu umgehen, ist nach wie vor, den Eingangswert des Filters zu verrauschen. Der maximale Abstand zum Real-Wert ist dann maximal temporär 1 digit. Mache ich seit X Jahren in all meinen Synthies und vielen Integer-basierten Rechnungen im FPGA so.
Jürgen S. schrieb: > ist nach wie vor, den Eingangswert des Filters zu verrauschen. Gehört habe ich davon schon, aber mich noch nie damit beschäftigt. Kennst Du dazu empfehlenswerte Literatur?
>Das stimmt. Allerdings stimmen die Zwischenwerte nicht.
Aber so: Jetzt wird auch der Rest berücksichtigt, der bei der
Integer-Division ansonsten verloren geht. Ist allerdings die Frage, ob
es nicht einfacher ist, einfach alle Eingangswerte um TAU größer zu
skalieren.
1 | #define TAU 128
|
2 | int filtIn = 0; |
3 | long filtLong = 0; |
4 | int filtOut = 0; |
5 | inr filtRest = 0; |
6 | |
7 | |
8 | //Filter erster Ordnung:
|
9 | filtLong += (filtIn-filtOut); |
10 | filtOut = (filtLong+filtRest) / TAU ; |
11 | filtRest = (filtLong+filtRest ) - filtOut * TAU ; |
c-heater schrieb: > Aber so Erst einmal: Danke. Das funktioniert tatsächlich so. Egal, ob das Filter inkrementell oder auf den Wert angewendet wird, stimmt jetzt das Ergebnis. Jetzt muß ich mir noch einmal in Ruhe anschauen, worin genau der Unteschied zu meinem Ansatz am Montag besteht. Da habe ich die Summe aus filtRest und filtLong gespeichert. Fun fact: Das Filter ist zwar ein Tiefpass, aber nur im Rahmen der Integer-Auflösung.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.