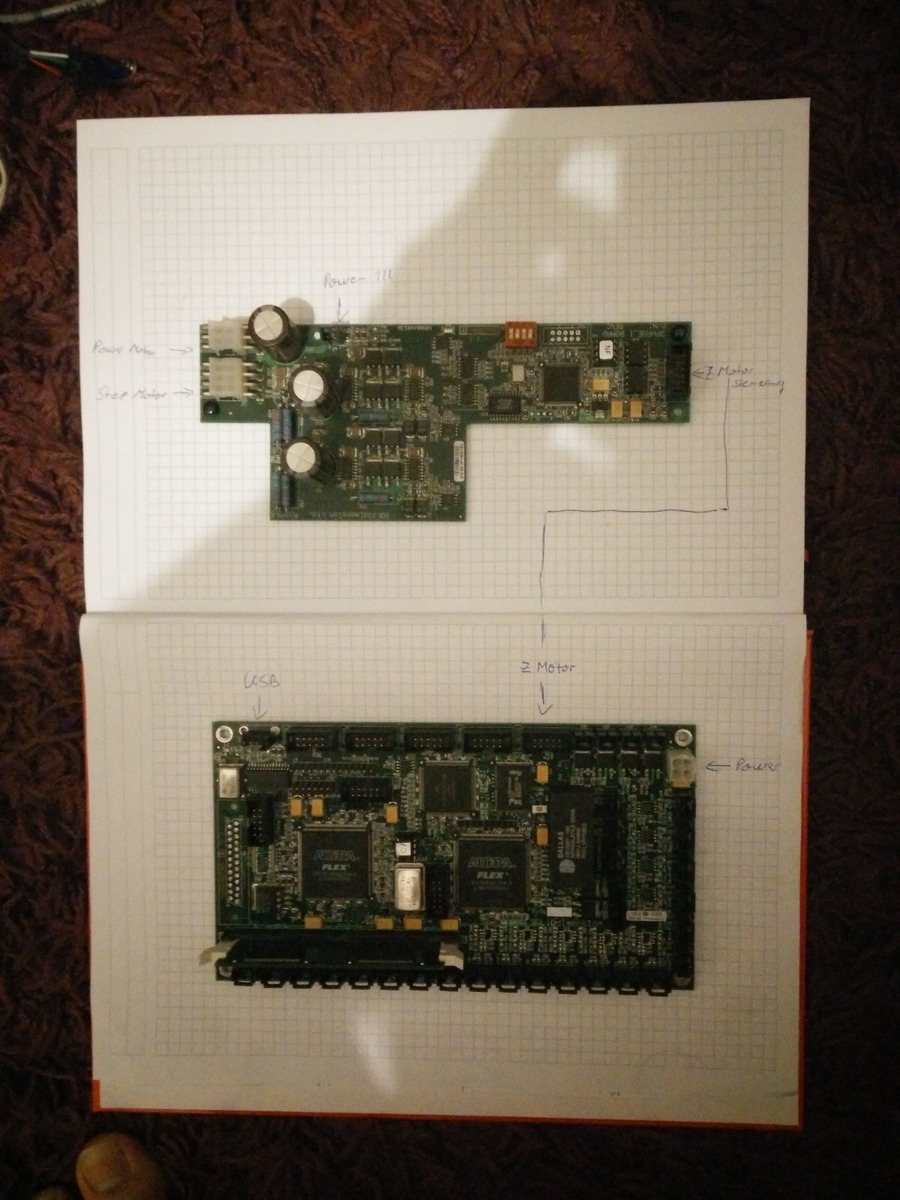
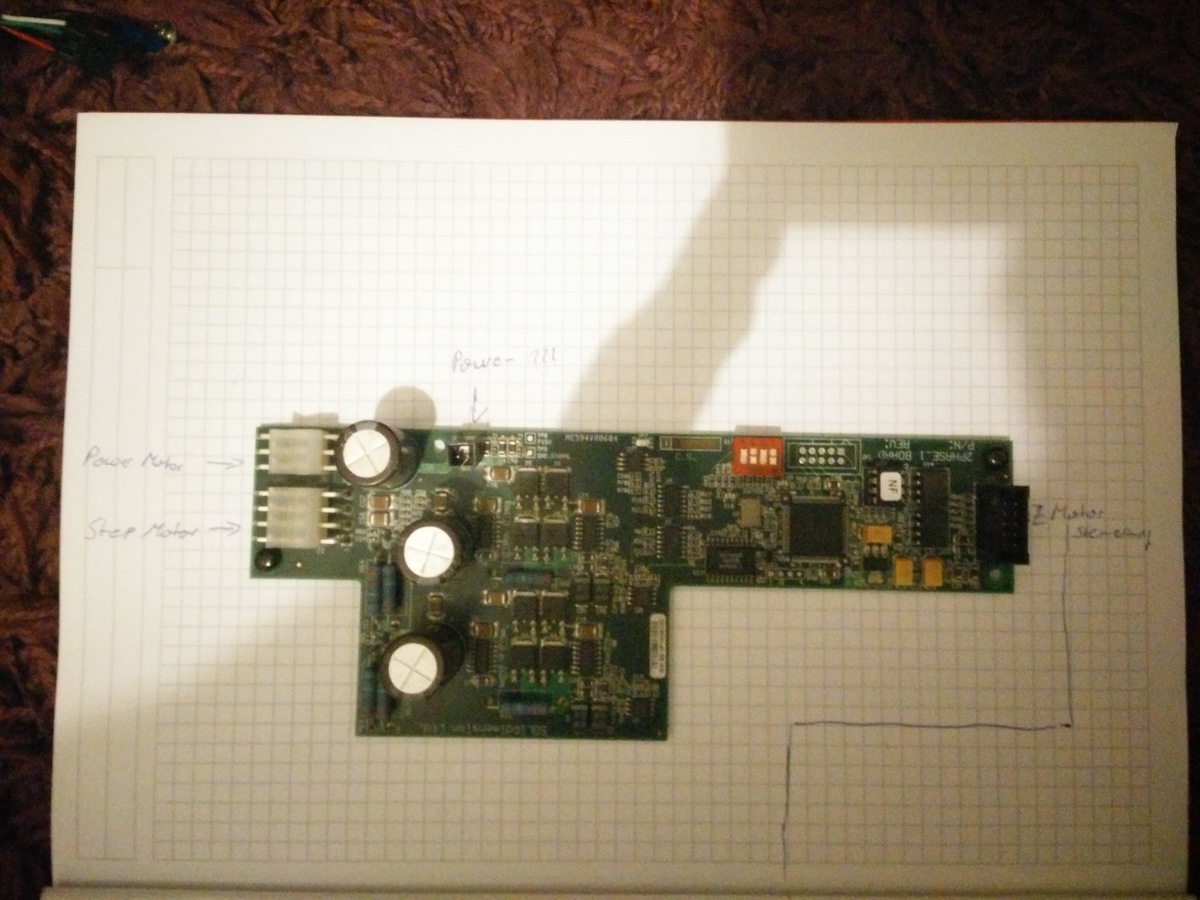
Servus Leute, ich habe einen alten Solido SD300 fürn Kasten Bier erhalten. Habe überall geschaut, ob man noch Rollen, Software ...etc. für diesen bekommt. Allerdings vergebens. Ich möchte mir einen 3D Drucker zsm-bauen und die Schritt-Motoren die verbaut sind und die bereits vorhanden X-Y-Z-Achsen, will ich gerne nutzen. Deswegen muss ich eig. nur noch die Steuerung hinkriegen. Klar kann ich das mit einen Arduino und Co. bewältigen und sicherlich auch wesentlich einfacher. Doch ich würde gerne das Board mit den ALTERA Flex EPF10K10AQC208-3 & EPF6016QC208-3 verwenden das zuvor ja auch die Steuerung übernommen hat steuern. Ich habe Bilder beigefügt wie die Hardware zsm-arbeitet. Es gibt die Steuerung mit den Altera Flex 10k und dann gibt es noch eine Steuerung und Stromversorgung für den Schrittmotor. Ich nehme an das dies die H-Brücke ist, die die Steuerung schützt. Wie komme ich in die Programmierung des Boards hinein? Welche Software kann ich da verwenden? Warum ich das so mache? Weil ich gerne dazulernen möchte. Danke für eure Unterstützung Maxi
Angehängte Dateien:
-

IMG_20190809_002844.jpg
220 KB -

IMG_20190809_002919.jpg
240 KB -

IMG_20190809_002926.jpg
240 KB -

IMG_20190809_002942.jpg
230 KB
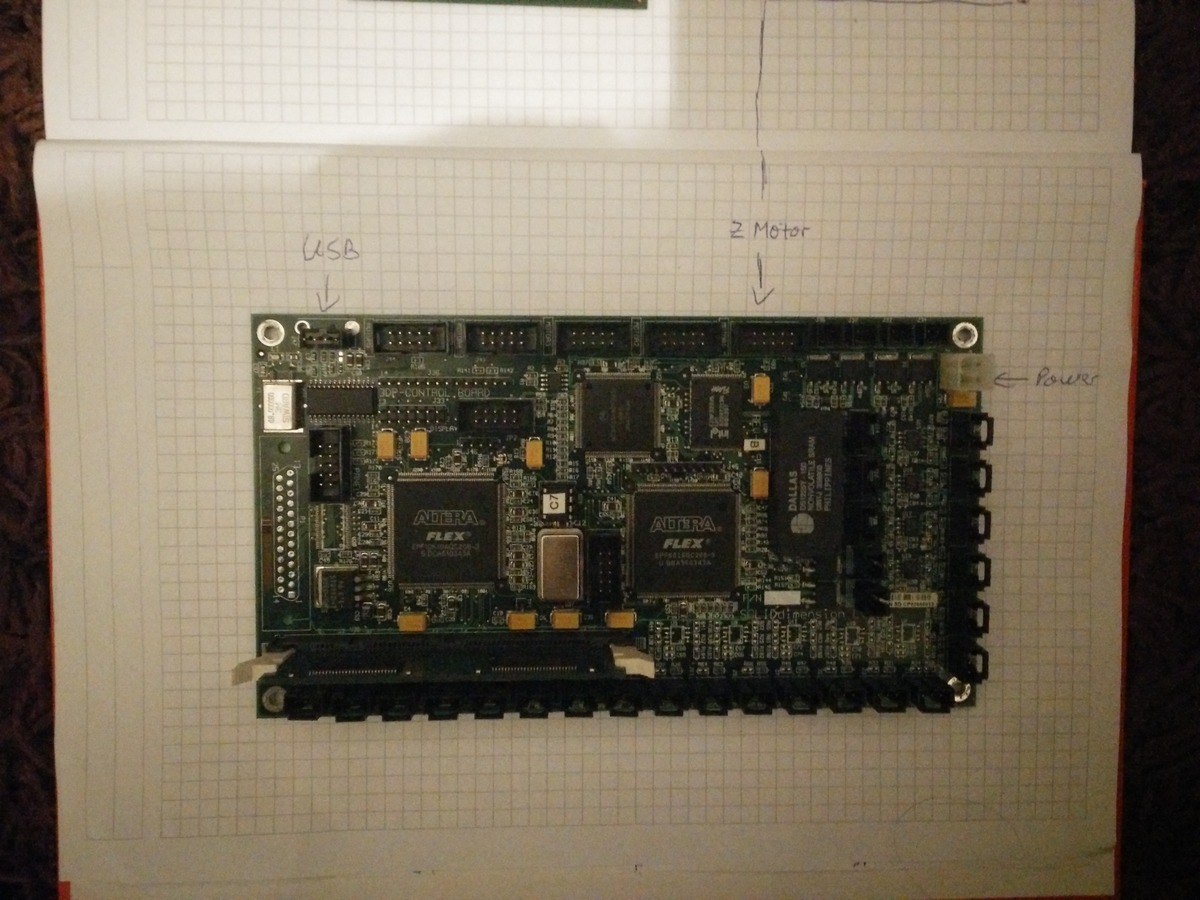
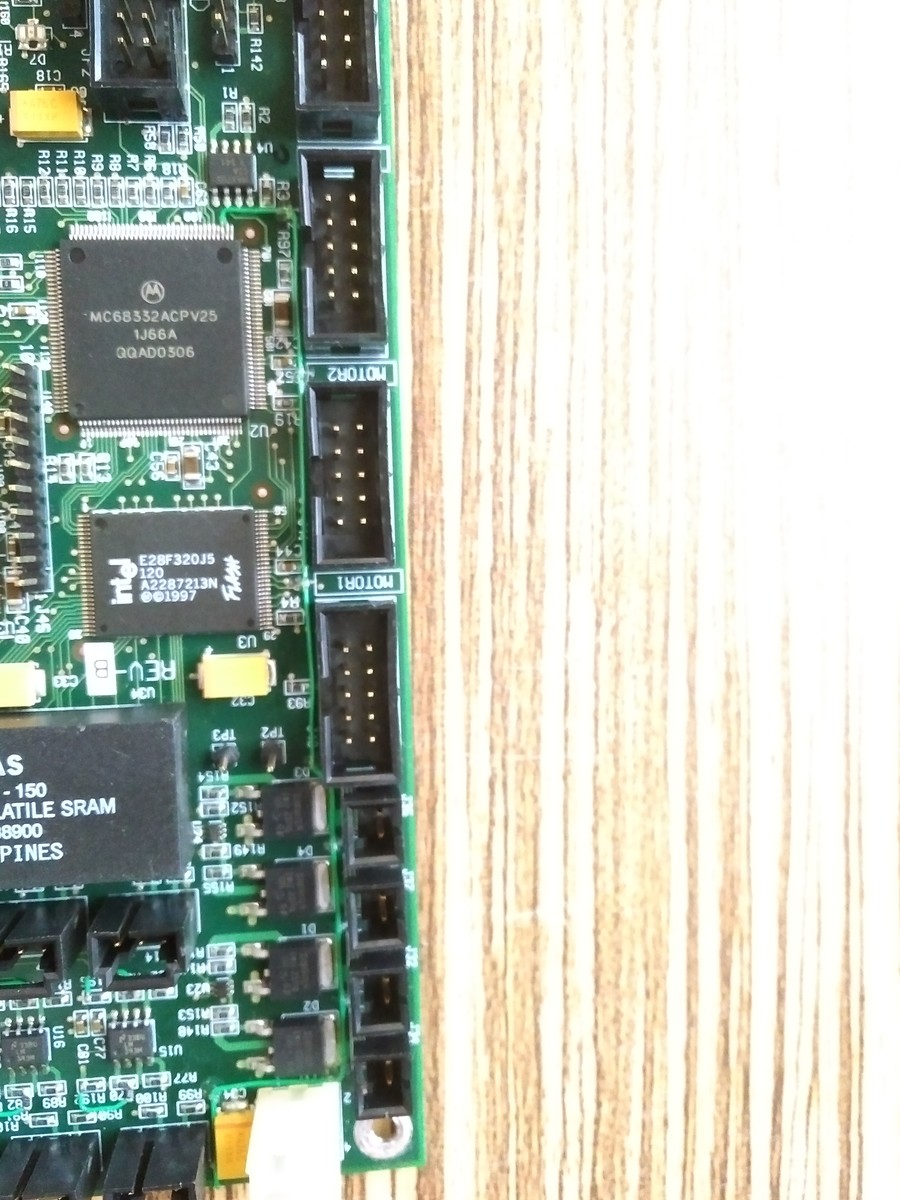
Ich seh da zusätzlich noch einen Motorola Prozessor (68K 32bit?) zu dem gehört wahrscheinlich auch der Flash Chip und das nonvolatile SRAM. Damit man für dieses Board überhaupt beginnen kann etwas zu entwickeln benötigst du recht detaillierte Information über das Pinning der FPGAs und des Prozessors. Da du keine Software hast um das Board anzusteuern bleibt dir nur ausklingeln (sehr Zeitaufwändig). Rauslesen wird nicht viel bringen, da dieses Board vermutlich sechs Layer oder mehr hat. Es gibt noch so Möglichkeiten per JTAG das Pinning zwischen grösseren Chips automatisiert heraus zu friemeln... Ich muss ehrlich sagen, dass ich bei deiner Idee sehr viel Zeitaufwändige reverseengineering Arbeit sehe, bei der du wohl nicht viel neues dazu lernst. Lange bevor zu dich dann überhaupt mit diesen alten FPGAs auseinander setzen kannst. Wie du schon geschrieben hast, ein Smoothieboard rein und du wärst grob nach einem Wochenende bei einer sich bewegenden Maschine. Aber das wäre dir ja zu Langweilig :-) Aus dem LinuxCNC/MachineKit Umfeld gibt eine eine Opensource FPGA Firmware für Schrittmotor/Servo/Encoder Karten, HostMot2 (offiziell unterstützt sind MESA Karten). Es wäre hübsch, wenn diese FPGA Firmware mal "jemand" adaptieren würde, damit es auf kleinen FPGA Karten für RaspberryPi/BeagleBone eingesetzt werden kann. Da bekommt man wenigstens die Schemas :-)
Angehängte Dateien:
-

IMG_20190809_1239402.jpg
240 KB -

IMG_20190809_1239579.jpg
240 KB -

IMG_20190809_1240243.jpg
240 KB -

IMG_20190809_1240115.jpg
240 KB -

IMG_20190809_1239345.jpg
230 KB




Hey Christoph, danke für deinen konstruktiven Beitrag. Das Forum hier war auch so meine letzte Hoffnung, bevor ich tatsächlich die Alternative wähle. Das Board ist so schön beschriftetet, sry wegen den blöden Bildern im ersten Beitrag, aber wenn einen um 1 Uhr morgens der Gedanke packt, dann muss er raus und die dunklen Bilder sind entstanden. Anbei habe ich diese heute morgen gemacht. Das Board ist Top beschrieben und überhaupt, war der Komplette Drucker in Stahl und selbst die Abstandshalter die heutzutage aus billigen Kunststoff gemacht werden waren aus Stahl. Insgesamt war nur das Gehäuse aus Kunststoff. Ein wahres vergnügen sich durch die Arbeit der Entwickler zu arbeiten! Nicht wie heutzutage... Am liebsten hätte ich den garnicht demontiert, aber gerade jetzt, möchte ich um so mehr auf das Board zugreifen können und neues "Leben" in einer etwas umgewandelter Form ein-hauchen. Die Frage ist wirklich nur, wie komme ich da rein. Du erwähnt das ich keine Wahl habe als nur ausklingeln. Wie kann ich mir das genau vorstellen? Grüße Maxi
Max L. schrieb: > Die Frage ist wirklich nur, wie komme ich da rein. Was verstehst du mit "reinkommen"? Hört sich vielleicht dumm an, ist aber wichtig für mich zu verstehen was du vor hast bzw. wie du dir das im Moment vorstellst. Max L. schrieb: > Du erwähnt das ich > keine Wahl habe als nur ausklingeln. Wie kann ich mir das genau > vorstellen? Datenblätter des Prozessors/FPGA etc. zusammensuchen. Für jeden Pin, der nicht Speisung ist oder durch andere Gründe klar ist womit er verbunden ist, mit dem Multimeter (Mit Piepser) herausfinden womit er verbunden ist.
Der vielversprechenste Ansatz (neben dem schon erwähnten Durchklingeln) für's Reverse Engineering ist m.E. der µC. Das ist ein Motorola 68332 (also aus der m68k-Familie), die noch relativ einfach zu verstehende Assembler-Instruktionen benutzt. Das Disassembly läßt sich mit etwas Übung direkt lesen und mit etwas Phantasie sollte sich nachvollziehen lassen, was das Programm da eigentlich treibt. Trotzdem kann das durchaus "ein wenig" dauern, zumal das Ding auch noch die TPU (Time Processing Unit) hat, die noch eine extra Herausforderung stellt... Reengineering der FPGA-Config dürfte mehr oder weniger aussichtslos sein. D.h. wenn man aus dem bisherig genannten nicht wenigstens ungefähr rauskriegt, was da ablaufen soll, ist hier Ende.
Hallo zsm, ich gehe direkt auf deine Frage Christophz schrieb: > Was verstehst du mit "reinkommen"? > > Hört sich vielleicht dumm an, ist aber wichtig für mich zu verstehen was > du vor hast bzw. wie du dir das im Moment vorstellst. Mit reinkommen verstehe ich in die Software zu kommen und diese zu programmieren, ähnlich wie bei einem Smoothieboard und damit den Schrittmotortreiber (Siehe Bild im ersten Beitrag) zu betreiben.. Christophz schrieb: > mit dem Multimeter (Mit Piepser) herausfinden womit er verbunden Das habe ich mir fast gedacht, hab nur gehofft das es besser/schnellere Methoden gibt. Ich denke das Board werde ich leider nicht nutzen können, da wie es auch klingt und ich gelesen habe, der Aufwand enorm ist. Allerdings hoffe ich durch reverse engineering wenigstens die Schrittmotortreiber zu benutzen (Das Bild im ersten Beitrag). Habt Ihr da Tipps? Werde da mit dem Programm gschem versuchen den Schaltplan zu konstruieren um eine bessere Übersicht zu erhalten und ggf. die Pläne veröffentlichen zu können falls ich mal stecken bleibe. Weitere Tipps? Grüße Maxi
Nun, das board ist jetzt nicht irre komplex. An den beiden FPGAs sind die meisten Pins nicht angeschlossen, ein teil des boards ist unbestückt. Das hat man an einem Tag durchgeklingelt.
Wenn ich mich dunkel entsinne, braucht man fuer die etwas aeltlichen Altera-Kaefer eine ebenso alte und abgehangene Software um ueberhaupt etwas sinnvolles mit ihnen zu tun. (Z.B. Mentor Leonardo) Bzgl. des 68332 kann schon die Wahl des richtigen Wertes fuer das Baseregister zu einem unfreundlichem Akt werden. Und die CS-Register fuer die Peripherie wollen auch richtig programmiert werden. Insgesamt viel Aufwand mit einem ungewissen Ergebnis.
Angehängte Dateien:
-

IMG_20190811_1135235.jpg
240 KB -

IMG_20190811_1135331.jpg
240 KB

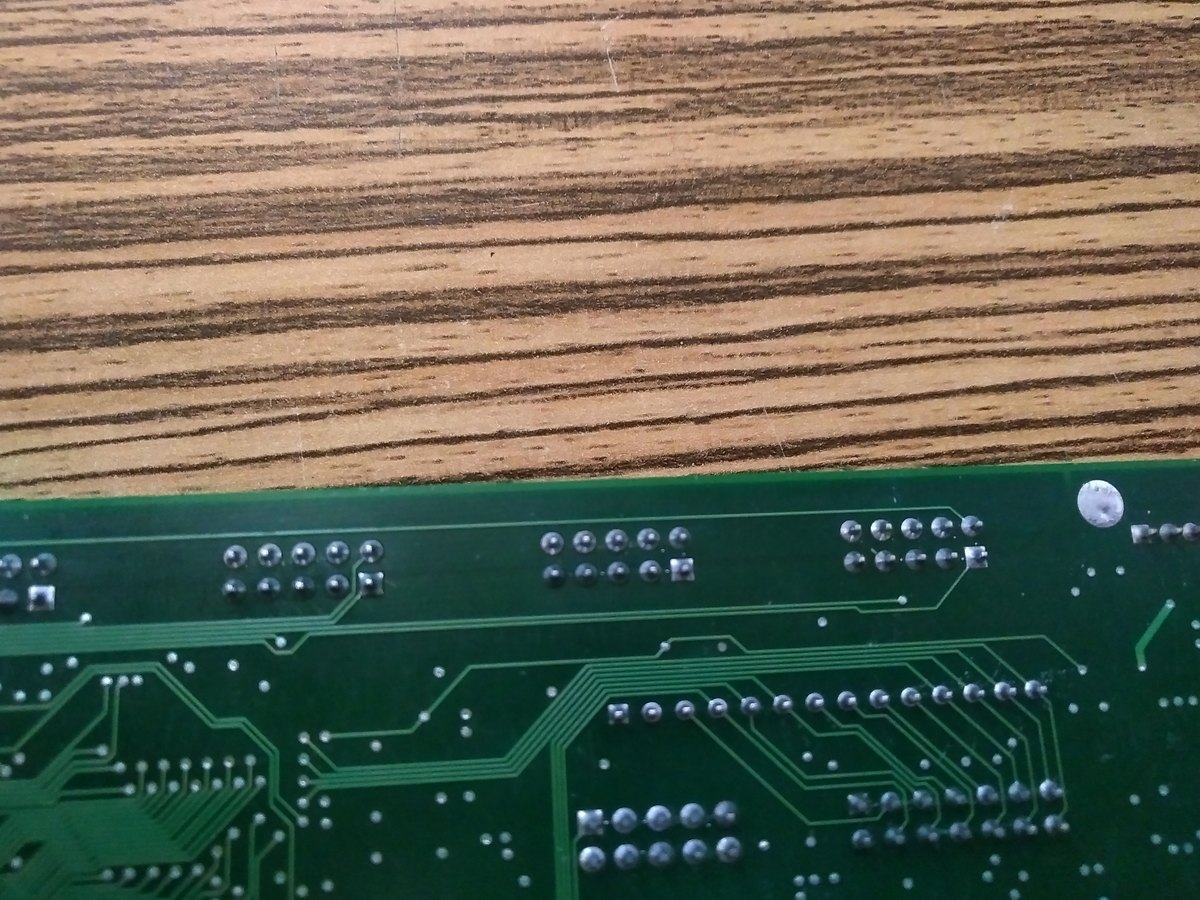
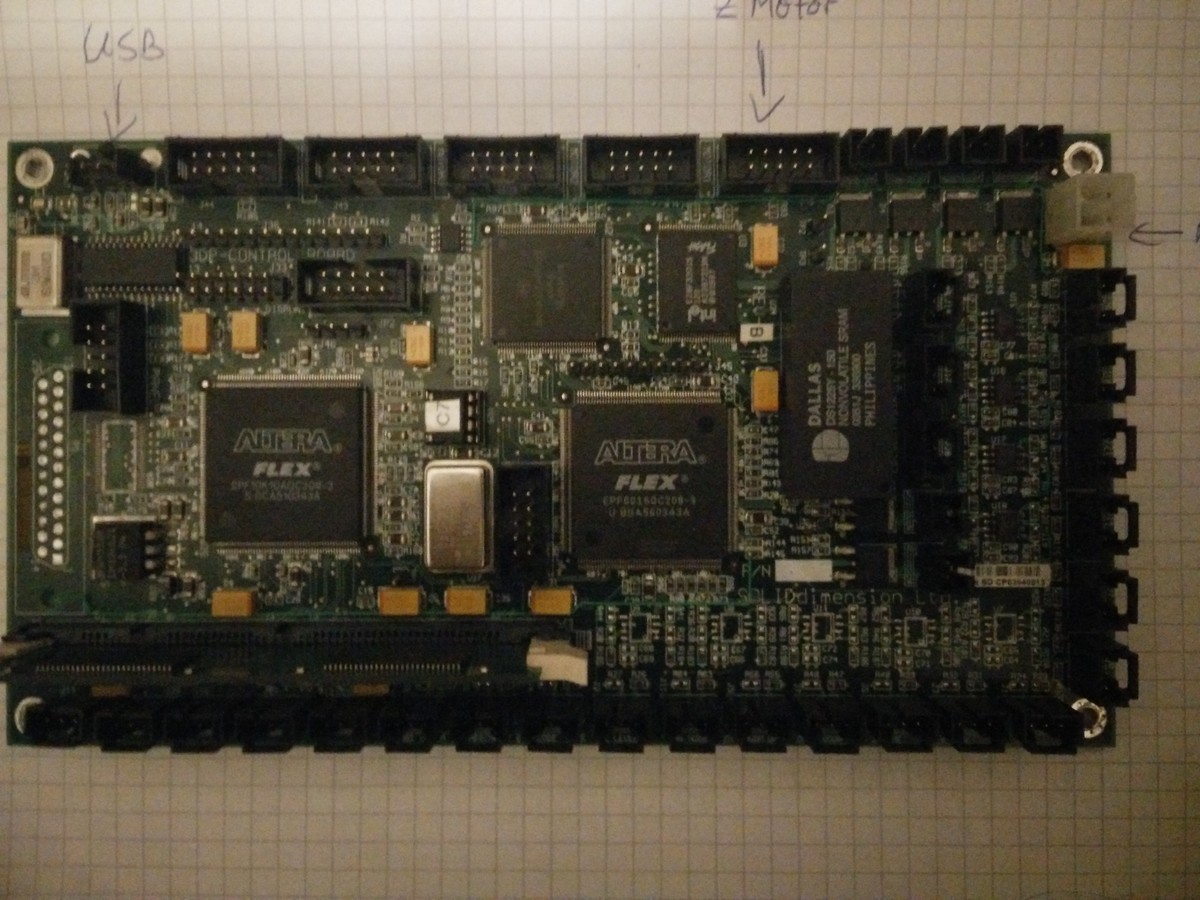
-gb- schrieb: > die meisten Pins nicht angeschlossen, ein teil des boards ist > unbestückt. Mich wundert es auch, warum z.B. an diesen Pins keine Leitungen verlaufen. (siehe angehangenes Bild) z.B beim Motor 4. Könnte zwischen der Oberen und Unteren Ebene auch Leitungen verlaufen die ich gerade nicht sehe? Sry für die dumme Frage, aber wie gesagt. Ich habe mich mit Hardware nie wirklich beschäftigt.
Das meinte ich nicht. Das hier auf den Bildern ist vermutlich auf den inneren Lagen angeschlossen. Aber an den beiden FPGAs sind viele Pins unbelegt. Gut auch da könnte die Leiterbahn nach innen unter den Chip weggehen, ist aber unwahrscheinlich.
Max L. schrieb: > Mit reinkommen verstehe ich in die Software zu kommen und diese zu > programmieren, ähnlich wie bei einem Smoothieboard und damit den > Schrittmotortreiber (Siehe Bild im ersten Beitrag) zu betreiben.. Das kannst du direkt vergessen. Was du machen musst, ist effektiv eine komplette Neuentwicklung der gesamten Software auf einer vorgegebenen Hardware. Die FPGA-Konfiguration ist fix, daran kannst du nichts ändern. Wenn sie nicht zu 100% auf deine Wünsche passt, musst du eine komplett eigene Alternative entwickeln und kannst dabei nichtmal auf die vorhandene Konfiguration zurückgreifen (der vorhandene Bitstream ist für dich nutzlos). Die Software kannst du zwar reverse engineeren, und das wirst du für ein Verständnis der Hardware möglicherweise ohnehin tun müssen, aber Veränderungen darin kannst du effektiv nicht vornehmen. Das läuft auch auf eine Eigenentwicklung raus. > Christophz schrieb: >> mit dem Multimeter (Mit Piepser) herausfinden womit er verbunden > Das habe ich mir fast gedacht, hab nur gehofft das es > besser/schnellere Methoden gibt. Nein. Du kannst einen Teil der Informationen aus der Software ziehen, aber Multimeter dürfte einfacher und schneller sein... und bei der Softwareanalyse helfen.
Wenn es dem so ist, dann werde ich schauen das ich nur die Schrittmotortreiber nehme. Schließlich tun die ja nur das was Ihnen von der Steuerung gesagt wird und dienen dazu dem Motor saft zu geben und die Steuerung vor Bildspannung zu schützen. Bin gerade dabei die Treiber auszuklingeln und den GND PIN zu finden. Gibt es da eine einfach Möglichkeit den richtigen PIN zu finden? Ich überlege alle Pins an meinen Arduino Uno anzuschließen und diese nacheinander auf HIGH zu schalten... problem.. kp wo mein GND an den pins ist... Tipp? Übrigens Danke für eure Unterstützung. Grüße Maxi
> und den GND PIN zu finden
Das ist nun wirklich die einfachste Uebung.
Such dir einen Kaefer wo das Pinout bekannt ist.
Z.B. den 68332.
Den Rest solltest du dir schon selber denken koennen.
Max L. schrieb: > Gibt es da eine einfach Möglichkeit den richtigen PIN zu finden? Ich empfehle ja das Datenblatt... Insbesondere Vcc und GND sind einfach zu finden.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.