Hallo zusammen, Ich hätte mal eine Frage zur ADC des Atmega328p. Man kann den ja im Free Running und im Single Conversion Modus betreiben. Für was brauche ich denn welchen Modus? Also ich meine, warum sollte ich den nicht immer im Free Running Modus haben, wenn ich nicht gerade eine Energiesparende Anwendung habe? Wieviel schneller ist der Free Running Modus im Vergleich zum Single Conversion Modus? Danke schon mal im Vorraus :)
Stefan H. schrieb: > Für was brauche ich denn welchen Modus? Single Conversion Modus bietet sich an, wenn dein Programm irgendwo eine einzelne Messung benötigt und ohne Probleme auf das Messergebnis warten kann. Free Running bietet sich an, wenn a) Messungen in regelmäßigen Intervallen nötig sind, zum Beispiel um Audio aufzuzeichnen b) Die Messungen automatisch im Hintergrund stattfinden sollen, so dass dein Programm jederzeit ohne warten zu müssen das Ergebnis der vorherigen Messung zugreifen kann. > Wieviel schneller ist der Free Running Modus > im Vergleich zum Single Conversion Modus? Der ist gar nicht schneller.
HI > Wieviel schneller ist der Free Running Modus > im Vergleich zum Single Conversion Modus? Das ist abhängig davon was du als Trigger Source (Datenblatt) einstellst. MfG Spess
wo ist dann der Nachteil im Free Running Modus? Warum nicht immer nur den nutzen?
Gegeg J. schrieb: > wo ist dann der Nachteil im Free Running Modus? Zum Beispiel, dass er kontinuierlich Strom verbraucht. Wenn nur wenig Energie zur Verfügung steht, will man nicht mehr Messungen machen, als notwendig.
Angehängte Dateien:
Stefanus F. schrieb: > Der ist gar nicht schneller. Stimmt, hab ich gerade im Datenblatt auch gefunden :) Konkret möchte ich einen MSGEQ7 Chip betreiben. Das ist ein kleiner Audio Spectrum Analyzer Chip, welcher mir für 7 Frequenzen die Höhe als Analogwert liefert. Die 7 Werte frage ich nacheinander ab, rechne ein bisschen damit, und frage sie dann erneut ab. Also hab ich das dann so richtig verstanden: Ich aktiviere den ADC einmal am Anfang, dann bleibt der an und frage dann die werte jedes mal im Single Cenversion Modus ab. Dann brauche ich für jede Abfrage 13 Zyklen. Danke schon mal! Gruß
Der ADC hat einen eigenen Takt, also 13 ADC-Zyklen. Wenn deine Referenz dann noch den Messanforderungen entspricht, ist eine Mittelwertbildung mit n=4, i.m,A. ausreichend.
Würde das so klappen?
1 | //ADMUX beschreiben, also Channel 0 und Referenz Auswahl
|
2 | //AVCC with external capacitor at AREF pin
|
3 | //ADLAR auf 1 -> Ergebnis is rechtbündig, da ich nur 8 bit brauche
|
4 | ADMUX &= ~(1<<REFS1) & ~(1<<MUX0) & ~(1<<MUX1) & ~(1<<MUX2) & ~(1<<MUX3); |
5 | ADMUX |= (1<<REFS0) | (1<<ADLAR); |
6 | |
7 | //Deaktiviere Energiesparen des ADC
|
8 | PRR &= ~(1<<PRADC); |
9 | //Aktiviere ADC, single mode ist default,setze Prescaler auf 128 -> 125khz
|
10 | ADCSRA |= (1<<ADEN) | (1<<ADPS2) | (1<<ADPS1) | (1<<ADPS0); |
11 | |
12 | while (1) |
13 | {
|
14 | ADCSRA |= (1<<ADSC); //start Conversion |
15 | while (ADCSRA & (1<<ADSC)); // warte bis ADCS = 0 -> Converison fertig |
16 | gelesener_wert = ADCH; //Nur ADCH Register kopieren, nur 8bit auflösung nötig |
17 | }
|
> wo ist dann der Nachteil im Free Running Modus? > Warum nicht immer nur den nutzen? Wenn man eine ganz bestimmte Abtastrate benötigt.
Stefan H. schrieb: > Also ich meine, warum sollte ich den nicht immer im Free Running Modus > haben, wenn ich nicht gerade eine Energiesparende Anwendung habe? Und damit hast du schon das erste Beispiel genannt: Warum sollte man den ADC laufen lassen, wenn man ihn nicht braucht? Die Heizung macht man ja auch nur an wenn einem kalt ist ;) Ein weiteres Beispiel ist eine FFT, hier bietet sich ein konstantes TA an. Das kann man im Free Running Mode machen, hat dann aber ggf. ein ziemlich krummes TA oder man triggert via Timer und hat so ein passendes TA sodass man bei der FFT noch mehr Zeit sparen kann. Bei einer Audio-Aufzeichnung will man in der Regel auch konstante Zeitabstände haben mit einer definierten Länge und da passt gff. die Abtastrate des ADCs auch nicht rein. Und von extern kann man den ADC auch triggern lassen, das Äquivalent dazu ist der externe Trigger am Oszilloskope. ;) Stefan H. schrieb: > Wieviel schneller ist der Free Running Modus im Vergleich zum Single > Conversion Modus? Ich meine der Free-Running-Mode ist um einen Zyklus schneller, genaueres weis das Datenblatt.
Angehängte Dateien:
-

ADCtiming.png
47 KB
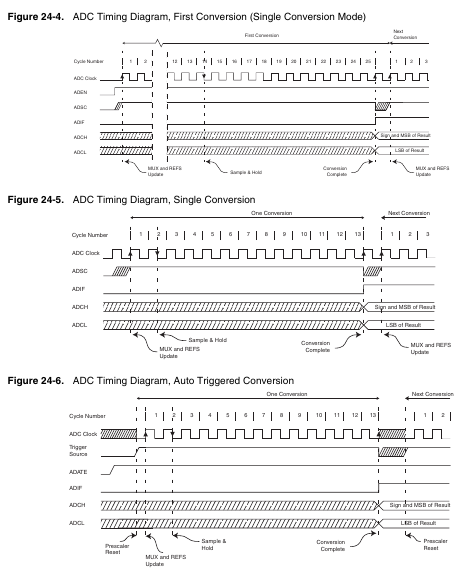
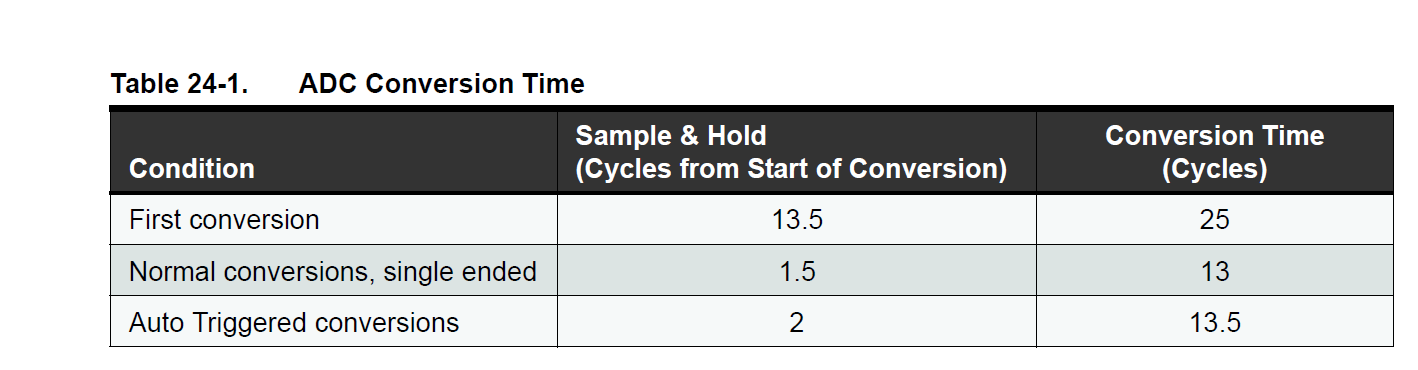
Die Datenblattangaben habe ich noch nie richtig kapiert. Wozu immer der halbe Zyklus "13,5"? Besonders ungeschickt ist die Zeitverzögerung, wenn man abwechselnd zwei Eingänge wandelt, das halbiert die Wandlungsrate, weil jedesmal neu kalibriert wird. Das Diagramm im Datenblatt ist eher verwirrend, wo sehe ich die 13,5 Zyklen? Da ist nur ein undefiniert schraffiertes Zeitstück nach dem 13. Takt.
Christoph db1uq K. schrieb: > Die Datenblattangaben habe ich noch nie richtig kapiert. Wozu immer der > halbe Zyklus "13,5"? Ich verstehe die Frage nicht. Ein Zyklus hat immer eine ganze Länge von ADC-Takten. Er startet und endet mit der steigenden Flanke. Die S&H Stufe schaltet bei der zweiten fallenden Flanke und folglich 1.5 ADC-Takte nach dem Start des Zyklus von Sample auf Hold. Ja, das ist halt so. War ein Kompromiß beim Design. Man hätte die Sample-Zeit auch 2 Takte statt 1.5 lang machen können, aber dann wäre der Zyklus 14 statt jetzt 13 Takte lang geworden. Oder nur einen Takt Samplezeit, dann müßte man den ADC aber noch niederohmiger ansteuern, damit die Sample-Kapazität in der kürzeren Zeit auch genau genug aufgeladen wird. > Besonders ungeschickt ist die Zeitverzögerung, wenn man abwechselnd zwei > Eingänge wandelt, das halbiert die Wandlungsrate, weil jedesmal neu > kalibriert wird. Auch dieser Satz ergibt keinen Sinn. Welche Kalibrierung meinst du? Da wird nichts kalibriert. Und daß man mit nur einem ADC bei zwei genutzen Kanälen immer nur im Wechsel messen kann und sich die effektive Abtastrate dadurch halbiert, ist auch unmittelbar einsichtig.
Oben im Bild von Stefan stehen die Zahlen, first conversion time ist (25+13,5) Zyklen statt der (2+13,5) Zyklen bei ständiger Wandlung eines einzigen Eingangs, z.B: ADC0. Nach Umschalten des Eingangs ist man wieder im First conversion Modus, braucht also mehr als die doppelte Zeit.
Free Running nimmt man, wenn nur ein Eingang einzulesen ist oder in einem konstanten Zeitraster vom Timer. Will man aber den MUX umschalten, wird es haarig damit. Dann ist es sicherer, erst dem MUX umzuschalten und dann die Wandlung zu starten.
Anscheinend habe ich das falsch verstanden,
1 | A normal conversion takes 13 ADC clock cycles. The first conversion after the ADC is switched on (ADEN in ADC-SRA is set) takes 25 ADC clock cycles in order to initialize the analog circuitry. |
also diese "Kalibrierung" muss nicht jedesmal zwangsweise erfolgen und
1 | In Free Running mode, always select the channel before starting the first conversion. The channel selection may be changed one ADC clock cycle after writing one to ADSC. However, the simplest method is to wait for the first conversion to complete, and then change the channel selection. Since the next conversion has already started automatically, the next result will reflect the previous channel selection. Subsequent conversions will reflect the new channel selection. |
das heißt ich muss möglichst früh auf den anderen Eingang umschalten
Hi >Nach Umschalten des Eingangs ist man wieder im First conversion Modus, >braucht also mehr als die doppelte Zeit. An welcher Stelle des Datenblatts steht das? MfG Spess
spess53 schrieb: >> Nach Umschalten des Eingangs ist man wieder im First conversion Modus, >>>braucht also mehr als die doppelte Zeit. > > An welcher Stelle des Datenblatts steht das? Er hat doch selbst schon bemerkt, dass dem nicht so ist.
sag ich ja, das war mein Missverständnis. Nur wenn der ADC vorher ausgeschaltet war gilt die Bezeichnung "first conversion", dann wird die analoge Schaltung initialisiert. Anscheinend müssen die unterschiedlichen Eingänge nicht einzeln initialisiert werden.
Peter D. schrieb: > Free Running nimmt man, wenn nur ein Eingang einzulesen ist oder in > einem konstanten Zeitraster vom Timer. > Will man aber den MUX umschalten, wird es haarig damit. Ich habe den free Running schon einmal benutzt, um sämtliche ADC Kanäle fortlaufen einzulesen und in ein Array einzutragen (je ein integer pro Kanal). So habe ich in diesem Array stets die (fast) aktuellen Spannungswerte aller ADC Eingänge verfügbar, ohne darauf warten zu müssen. Die Zugriffe darauf müssen allerdings synchronisiert werden, damit man nicht liest, während die ISR schreibt.
Christoph db1uq K. schrieb: > Oben im Bild von Stefan stehen die Zahlen, first conversion time ist > (25+13,5) Zyklen statt der (2+13,5) Zyklen bei ständiger Wandlung eines > einzigen Eingangs Die halben Taktzyklen halluzinierst du irgendwoher. Es sind 25 oder 13 Taktzyklen Wandlungs dauer. Der halbe Takt bezieht sich immer nur auf den Zeitpunkt, wann der ADC das Analogsignal latched. In manchen Anwendungen ist das wichtig. Peter D. schrieb: > Free Running nimmt man, wenn nur ein Eingang einzulesen ist oder > in einem konstanten Zeitraster vom Timer. > Will man aber den MUX umschalten, wird es haarig damit. Keineswegs. Man darf jederzeit auf das MUX Register schreiben. Wenn gerade eine Wandlung läuft, hat es halt keinen unmittelbaren Effekt. Im Freerunning Modus läuft praktisch immer eine Wandlung. Ein Kanalwechsel durch das Beschreiben des MUX Registers ist dann halt immer um eine Wandlung verzögert. Wirklich praktikabel ist Freerunning auf mehreren Eingängen aber in der Tat nur in Verbindung mit dem ADC-Complete Interrupt. Die ISR kann dan den ADC-Wert für den letzten Kanal lesen und unmittelbar den nächsten Kanal nach MUX schreiben. Den Wert des aktuellen Kanals hat sie beim vorigen Aufruf setzen müssen.
Stefanus F. schrieb: > Die Zugriffe darauf müssen allerdings synchronisiert werden, damit man > nicht liest, während die ISR schreibt. Das gilt eigentlich für jedes Register: Man sollte nicht lesen während jemand anderes grade was reinschreibt. Kann zu ekeligen Fehler führen deren Ursache man auch nicht zwingend nach nem viertel Jahrhundert findet.
Ok, wir haben den "Auto triggered mode" in verschiedenen Varianten, von denen ich den "Free-running mode" benutze, alle zeitkritischen Operationen in einer periodische ausgelösten ADC-Complete Interrupt-Routine in festen Zeitabständen. Das Hauptprogramm darf alles andere erledigen, das nicht zeitkritisch ist, ich muss nur sicher sein, dass die Interruptroutine nicht länger als der Sampleabstand wird. Meine Anwendung wäre eine DSP-Aufgabe, acht Allpassfilter zweiter Ordnung mit acht 16-Bit Multiplikationen zu rechnen. Das ganze habe ich vor 10 Jahren mal angefangen aber einschlafen lassen: https://www.mikrocontroller.net/articles/Hilbert-Transformator_(Phasenschieber)_mit_ATmega damals gab es noch keinen Arduino, aber die Verhältnisse sind ähnlich. Mit QO-100 ist das wieder aktuell geworden. Für einen SSB-Sender brauche ich eine Samplerate, die ein Mikrofonsignal bis zu 3 kHz sampled, also um die 8 kHz, das geht mit dem Arduino noch. Die beiden PWM-Ausgänge liefern dann I und Q für eine I/Q-Modulator. Für die Verwendung derselben Filter in einen SSB-Empfänger müsste ich I und Q eigentlich gleichzeitig wandeln, aber direkt nacheinender sollte keinen großen Fehler bewirken. Erst wenn zwei Samples vorliegen würde die DSP-Routine einmal rechnen, alles im Interrupt. Das Hauptprogramm darf bei Bedarf noch gemütlich eine Drehgeber abfragen, ein Textdisplay ansteuern und eine PLL einstellen, alles ohne Echtzeitanforderungen.
Axel S. schrieb: > Man darf jederzeit auf das MUX Register schreiben. Das ist auch nicht das Problem. Aber andere Interrupts können das soweit verzögern, daß die nächste Wandlung schon abgeschlossen ist. Dann hat man 2 Ergebnisse vom selben Kanal und der nächste Kanal fehlt. Solche Fehler sind extrem schwer zu debuggen.
Man darf immer in das MUX Register schreiben. Allerdings ist der Effekt abhängig vom Timing: gleich nach dem Starten des ADCs gilt es noch für die aktuelle Wandlung. Nach etwa 1 ADC clock zyklus (könnte ggf. etwas mehr sein), gilt der neue MUX wert dann erst für die Wandlung nach der gerade laufenden. Wenn man in der ADC-comlete ISR schnell ist, könnte man noch den ersten Fall haben und dann durch kleine Verzögerungen im Aufruf der ISR (z.B. kurzer CLI - SEI Block oder ein anderer Interrupt) schon in den 2. Fall rutschen. Wenn man sowieso lange genug wartet bzw. rechnet, um in den 2. Fall zu rutschen, hat man recht viel Reserve für Verzögerungen.
Peter D. schrieb: > andere Interrupts können das soweit > verzögern, daß die nächste Wandlung schon abgeschlossen ist. Interrupts können potentiell alles so weit stören, dass es nicht mehr korrekt funktioniert. Man muss schon mit Hirn kombinieren - copy-paste Programmieren funktioniert selten.
Stefanus F. schrieb: > Interrupts können potentiell alles so weit stören, dass es nicht mehr > korrekt funktioniert. Wenn man aber erst die nächste Wandlung startet, nachdem der MUX umgeschaltet wurde, kann ein anderer Interrupt nur verzögern. Die Reihenfolge stimmt aber immer. Die eine Zeile Codeeinsparung (ADC-Startbefehl) ist den ganzen Ärger nicht wert. Wie gesagt, solche Fehler möchte ich nicht debuggen müssen.
Peter D. schrieb: > Die eine Zeile Codeeinsparung (ADC-Startbefehl) ist den ganzen Ärger > nicht wert. Wenn du jede Wandlung einzeln startest, ist der ADC allerdings bedeutend langsamer und hat zudem keine regelmäßige Abtastrate mehr (weil andere Interrupts stören). Ob das noch Ok ist, hängt von der Anwendung ab. Wenn man so generisch fragt, wie der TO es getan hat, kommt man leider immer vom Höckschen auf Stöckchen. Programmieren ist eben kein einfacher Job.
Stefanus F. schrieb: > Wenn du jede Wandlung einzeln startest, ist der ADC allerdings bedeutend > langsamer und hat zudem keine regelmäßige Abtastrate mehr (weil andere > Interrupts stören). Lieber fehlertolerant programmieren, als falsche Ergebnisse zu erhalten.
Mal ne doofe Zwischenfrage. Wenn man im Free Running Modus nach jeder Messung den Kanal wechselt, bekommt man da nicht eh nur Schrott raus, weil der S&H gewöhnlich gar nicht so schnell umgeladen ist? Da muss die Quelle schon arg niederohmig sein.
Keiner N. schrieb: > bekommt man da nicht eh nur Schrott raus Das geht schon. Für Sample&Hold sind ein paar von den 13 Takten jeder Wandlung reserviert.
Keiner N. schrieb: > Da muss die > Quelle schon arg niederohmig sein. Oft reicht ein kleiner Pufferkondensator (100nF) am Eingang, um schnell genug umzuladen. Eine Ausnahme sind die internen 1,1V, die brauchen eine sehr lange Aufladezeit. Ich warte da z.B. 16 Wandlungen lang (15 Wandlungen verwerfen).
Peter D. schrieb: > Lieber fehlertolerant programmieren, als falsche Ergebnisse zu erhalten. In Christophs Kontext wäre eine reduzierte Abtastrate ein falsches Ergebnis, da hilft all die vermeintliche Fehlertoleranz dann nichts mehr. Wenn man den ADC benutzen will, um damit DSP-Funktionalität zu implementieren, geht das nur mit einer bekannten Abtastrate – und die konstante Rate ist dabei die einfachste Variante, wie man sie "bekannt" macht.
Welche Abtastrate kann ein Arduino mit 16 MHz Quarz überhaupt erreichen? Das Datenblatt macht die etwas schwammige Aussage:
1 | By default, the successive approximation circuitry requires an input clock frequency between 50kHz and 200kHz to get maximum resolution. If a lower resolution than 10 bits is needed, the input clock frequency to the ADC can be higher than 200kHz to get a higher sample rate. |
Der Prescaler kann aus den 16 MHz auf 125 kHz bis 8Mhz Sampletakt teilen. Mit der Aussage "A normal conversion takes 13 ADC clock cycles." komme ich dann auf eine Wandlungsrate von 9,6 kHz bis 615 kHz mit der genannten Einschränkung oberhalb 200 kHz.
Ursprünglich standen da nur 50 bis 200 kHz drin, später hat man zugestanden, dass der ADC auch mit höherem Takt arbeiten kann, dann wird nur das Ergebnis ungenauer (also die LSBs verrauschen). Erfahrungswert ist, wenn ich mich recht erinnere, dass bei 1 MHz noch ca. 8 Bit nutzbar sind. Weiß nicht, ob dir die genügen.
Die Begrenzung liegt bei meiner Aufgabe eher in der Ausführungszeit der Interruptroutine. Ich meine dass es damals etwa 60 oder 70% Rechenzeit waren, weiß aber nicht mehr ob das mit Clk/64 war (Clk/128 ist auskommentiert). Das wären 250 kHz ADC-Takt und 19 kHz Samplerate. Inzwischen sind 32-bit Controller den 8-Bittern preislich gleichgezogen, das ganze ist jetzt eher minimalistische Kunst. Wenn es mit einem Arduino noch geht, kann es ein ARM allemal. Dasselbe im CPLD mit multiplierless Integerarithmetik wäre noch interessant, vielleicht versuche ich das auch noch.
Christoph db1uq K. schrieb: > das ganze ist jetzt eher minimalistische Kunst Das dachte ich mir auch, als ich das gestern kurz überschlagen habe. ;-)
Christoph db1uq K. schrieb: > Welche Abtastrate kann ein Arduino mit 16 MHz Quarz überhaupt erreichen? > > Das Datenblatt macht die etwas schwammige Aussage: > > By default, the successive approximation circuitry requires an > input clock frequency between 50kHz and 200kHz to get maximum > resolution. If a lower resolution than 10 bits is needed, the input > clock frequency to the ADC can be higher than 200kHz to get a higher > sample rate. Was ist daran schwammig? > Der Prescaler kann aus den 16 MHz auf 125 kHz bis 8Mhz Sampletakt > teilen. Mit der Aussage "A normal conversion takes 13 ADC clock cycles." > komme ich dann auf eine Wandlungsrate von 9,6 kHz bis 615 kHz mit der > genannten Einschränkung oberhalb 200 kHz. Wenn du die Einschränkung ernst nimmst, liegt die einzig erlaubte ADC Taktfrequenz bei 125kHz, was ~9.6kHz Abtastrate ergibt. Höhere ADC Taktfrequenzen funktionieren (bei geringerer Genauigkeit des ADC) aber es gibt keine Garantie oder gar Spezifikation, wieviele Bits es bei welcher Frequenz sind. Christoph db1uq K. schrieb: > Die Begrenzung liegt bei meiner Aufgabe eher in der Ausführungszeit der > Interruptroutine. Ja, klar. Viel Rechnerei kannst du mit einem AVR dann nicht mehr machen. Vor allem, wenn du die vollen 10 Bit vom ADC verwenden willst. Aber wie du schon sagst, gibt es dafür geeignetere Bausteine. Von den einfachen Cortex-M0 über M4 (FP, DSP-Extension) bis hin zu ausgewachsenen DSP.
Ja das sollte "schwammig" heißen, der Hersteller nennt keine Daten über 200 kHz. Für einen Bastler kein Problem, aber für professionellen Einsatz in der Serie sollte man das ernst nehmen. Wenn es mit den ersten Exemplaren funktioniert ist das keine Garantie, das kann teuer werden.
Christoph db1uq K. schrieb: > Wenn es mit den ersten Exemplaren funktioniert ist das keine Garantie, > das kann teuer werden. Naja, ist halt die Frage, was du damit anstellen willst. Für eine Überwachugn der Batteriespannung genügen auch deutlich weniger Bits an Genauigkeit. Die Aussage bedeutet letztlich, dass der ADC nicht etwa oberhalb 200 kHz radikal seine Arbeit einstellt, sondern dass er mit höher werdender Taktfrequenz nur zunehmend ungenauer wird.
Angehängte Dateien:
-

ADC.png
110 KB
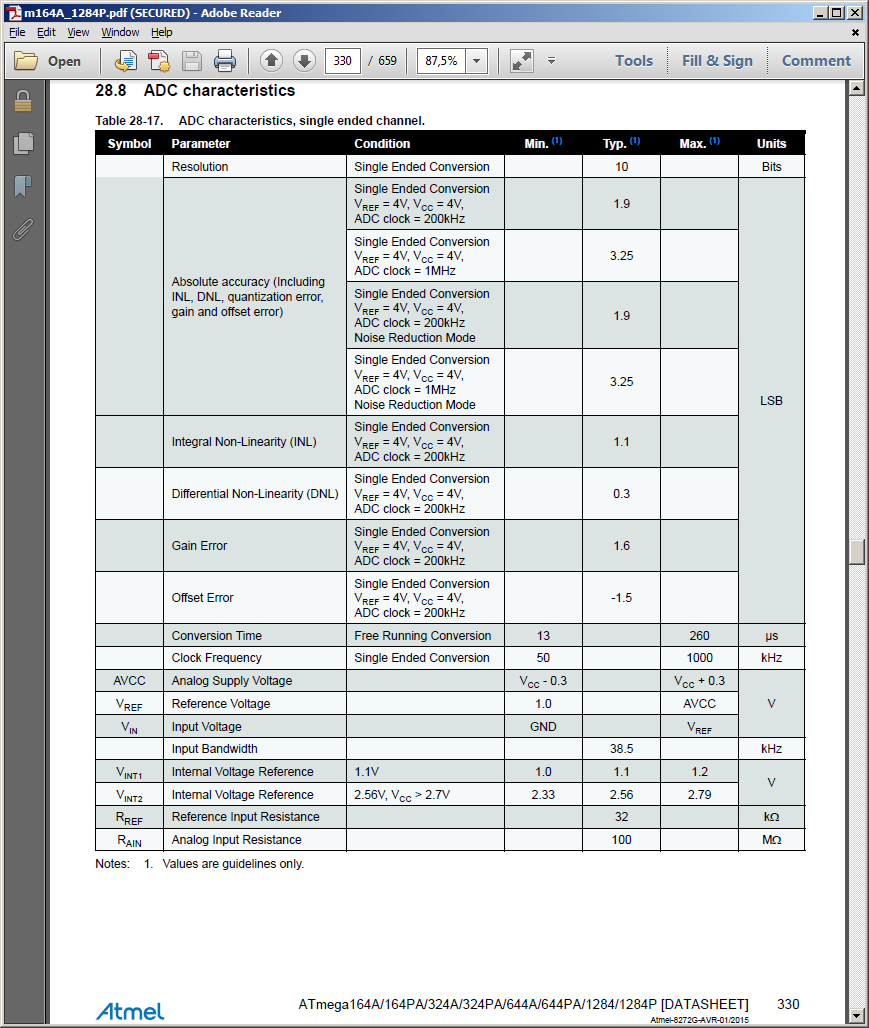
Zugegeben, es sind 'typische' Werte, aber als "schwammig" würde ich die Angabe nicht bezeichnen.
Das ist zwar nicht der "Arduino-Typ" aber im Datenblatt zum 328P ist die Tabelle auch enthalten, nicht im Kapitel ADC sondern weiter hinten Kapitel 29.8 Table 29.15. Hier Seite 319: http://ww1.microchip.com/downloads/en/DeviceDoc/ATmega48A-PA-88A-PA-168A-PA-328-P-DS-DS40002061A.pdf Für 1 MHz, die Jörg genannt hat ist eine "Resolution, Absolute accuracy..." von 3,25 LSB, also des 10. Bits genannt. Das heisst also 1,625 des neunten Bits oder fast einmal das 8.Bit, das würde also stimmen. Auch unter clock frequency ist 1 MHz als obere Grenze genannt. Das ist doch deutlich präziser als im ADC-Kapitel. Die 662 Seiten hätte ich gründlicher durchsehen müssen, danke für den Tip. Zur Eingangsfrage, ich hatte vom Audio-Analyzer-Chip im Elektor Mai/Juni 2019 gelesen. So neu ist der nicht, ein Datenblatt von 2004: https://www.sparkfun.com/datasheets/Components/General/MSGEQ7.pdf hier im Forum unter MSGEQ7 verlinkt von 2011. Die Amplitudendetektoren sind schon drin, da ist doch keine hohe Geschwindigkeit mehr nötig. Ganz anders "die Mutter aller AVR-Audioanalyzer" von Elm-Chan, das ist auch ein Paradebeispiel minimaler Programmierkunst von 2005: http://elm-chan.org/works/akilcd/report_e.html
Christoph db1uq K. schrieb: > Auch unter clock frequency ist 1 MHz als obere Grenze genannt. Ja, wie schon geschrieben, das haben sie mal nachgereicht. Ursprünglich stand in den Datenblättern der AVRs nur der Garantiebereich von 50 bis 200 kHz drin. Nachdem die Nutzer rausgefunden hatten, dass die Teile auch mit 1 MHz noch sauber genug für viele Anwendungen arbeiten (viele Leute werden vermutlich sowieso gleich ADLAR setzen und dann nur das High-Byte nutzen), hat man dann die 1 MHz mal in die Datenblätter überhaupt mit aufgenommen. Das erklärt aber, warum es in der Prosa nicht so drin steht, nur in den Tabellen.
Espressif hätte links oben auf die erste Seite geschrieben: 10Bit ADC with up to 2Mhz
Sorry für die späte Rückmeldung. Danke euch allen für eure Aufklärung, hat mir viel gebracht :) Schönen Sonntag noch :)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.