Hallo...
Warscheinlich wurde es hier schon oft geschrieben...
Bin neu hier und habe ein Problem...
Ich komme mit meinem Sketch nicht weiter.
Ich will, das der Schrittmotor anfängt zu drehen, sobald der Pin 13 ein
HIGH-Signal erhält und sobald das HIGH-Signal weg ist soll er weiter
drehen. Zusätzlich soll der Motor bei jedem Step intern gezählt werden
und sobald eine Summe von 200 Steps erreicht ist, soll er in den
Ruhemodus gesetzt werden und auf einen neuen Impuls warten.
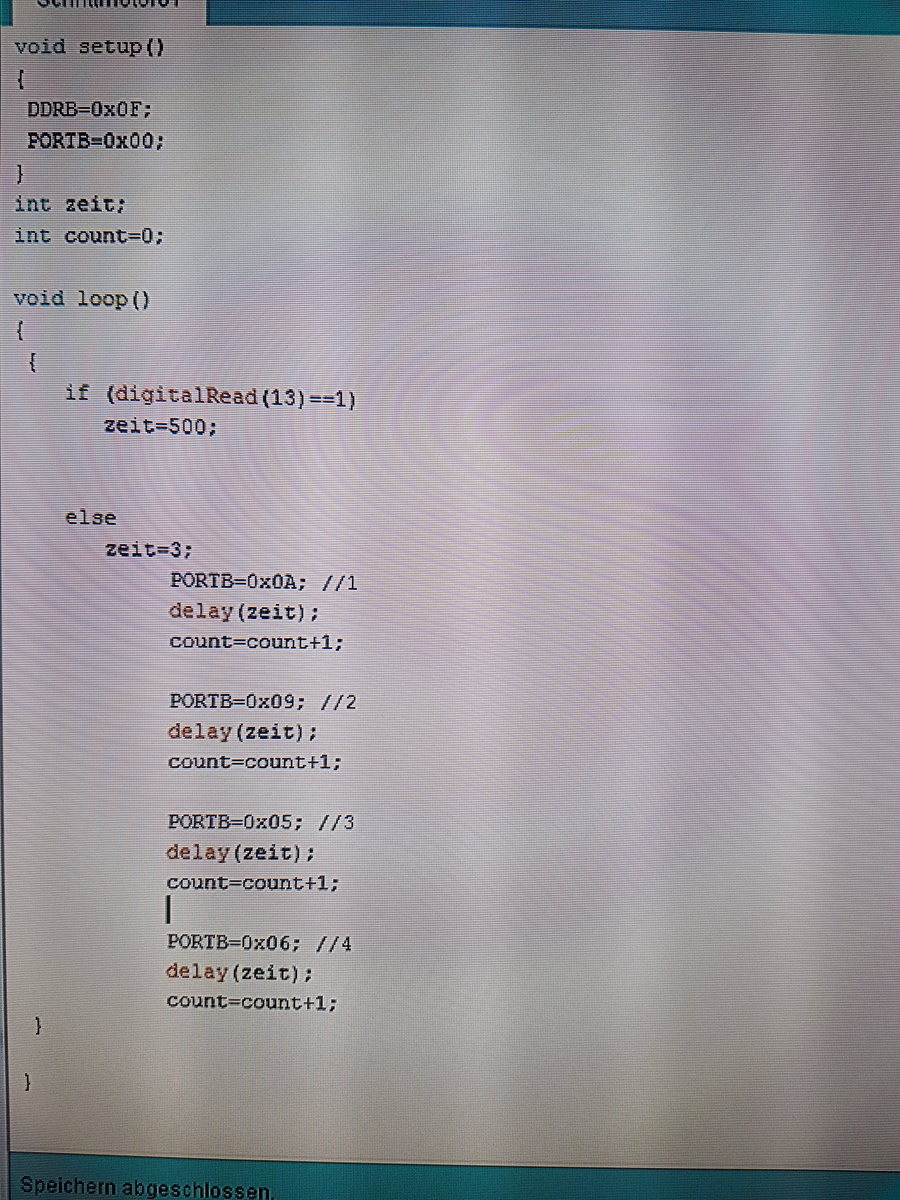
void setup()
{
DDRB=0x0F;
PORTB=0x00;
}
int zeit;
int count=0;
void loop()
{
{
if (digitalRead(13)==1)
//Kein Plan zum stopen und counter einzusetzen
else
zeit=3;
PORTB=0x0A;
delay(zeit);
count=count+1;
PORTB=0x09;
delay=(zeit);
count=count+1;
PORTB=0x05;
delay(zeit);
count=count+1;
PORTB=0x06;
delay(zeit);
count=count+1;
if (count <200) // Schleife wiederholen ?!
}
}
Weis Jemand rat?
Habe bisher keine Fehler. Motor dreht. Komme jedoch nicht auf die
Lösung.
Das Programm habe ich mit dem Handy hier hinein geschrieben, da ich kein
Internet für'n Rechner habe.
Währe trorzdem für eine brauchbare Lösung dankbar...
Jan W. schrieb:> Habe bisher keine Fehler. Motor dreht.
So wie das da steht, ist das kein gültiger C-Code, irgendwas
verschweigst du also.
Jan W. schrieb:> Komme jedoch nicht auf die> Lösung.
Ah, eine Hausaufgabe also. Dann liefer doch wenigstens die tatsächliche
Aufgabenstellung.
Jan W. schrieb:> da ich kein> Internet für'n Rechner habe.
Hotspot kennste?
Auch ein abfotografierter Bildschirm mit dem wahren Code wäre besser als
völlig falsch abgetippter.
Helmut -. schrieb:> Ausserdem ist ein = zuviel.
Bitte was?!
Jan W. schrieb:> So sieht der Sket zur Zeit aus...
Und das kompiliert? Schlag mal nach, wie die Klammern bei if...else in C
gesetzt werden. So macht das keinen Sinn.
Habe kein Internet für'n Rechner.
Auch kein HotSpot oder so.
Bin über 40 und kein Schuljunge mehr.
Will einfach via Tastendruck das programm starten.
Nach durchlaufen der angegeben und erreichten Countermenge soll er
wieder darauf warten, das eine Taste gedrückt wird.
Was ist daran jetzt verheimlicht?
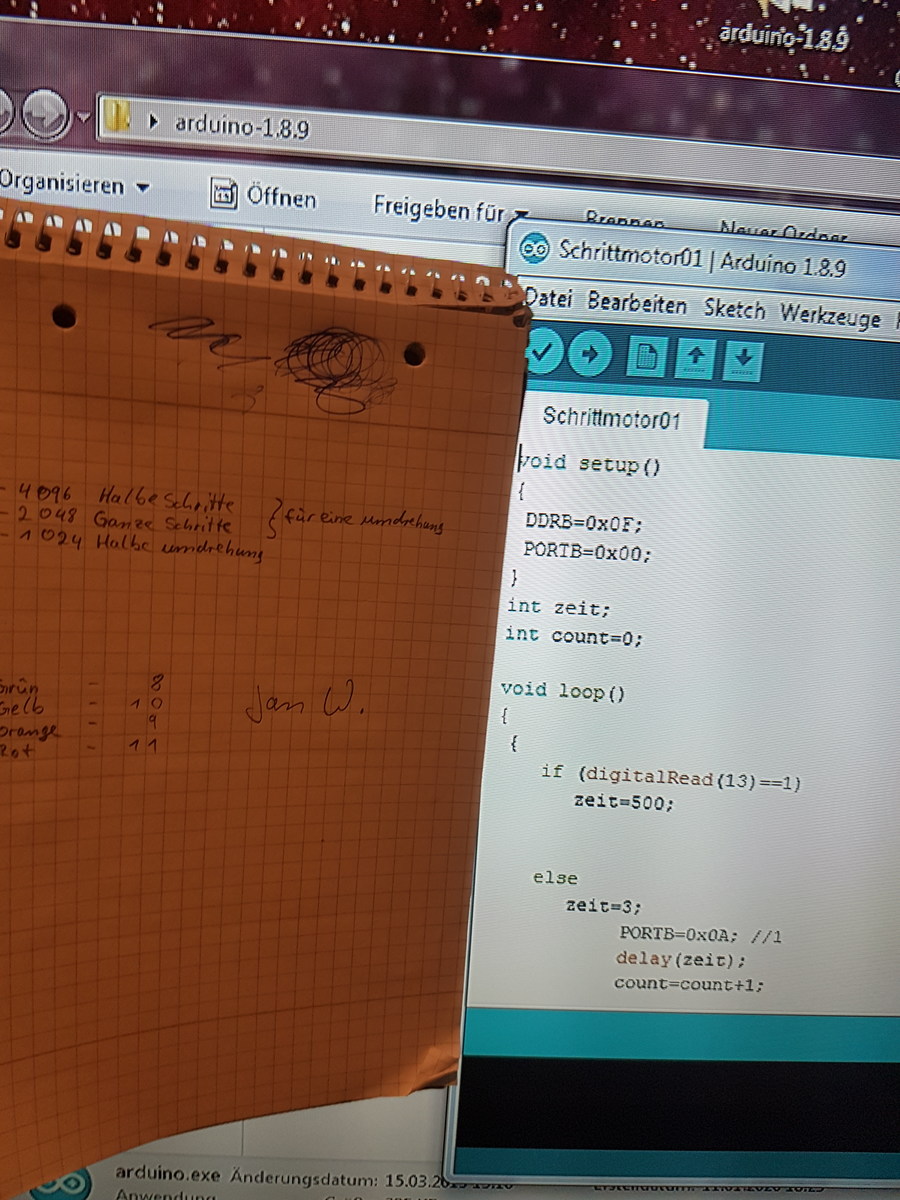
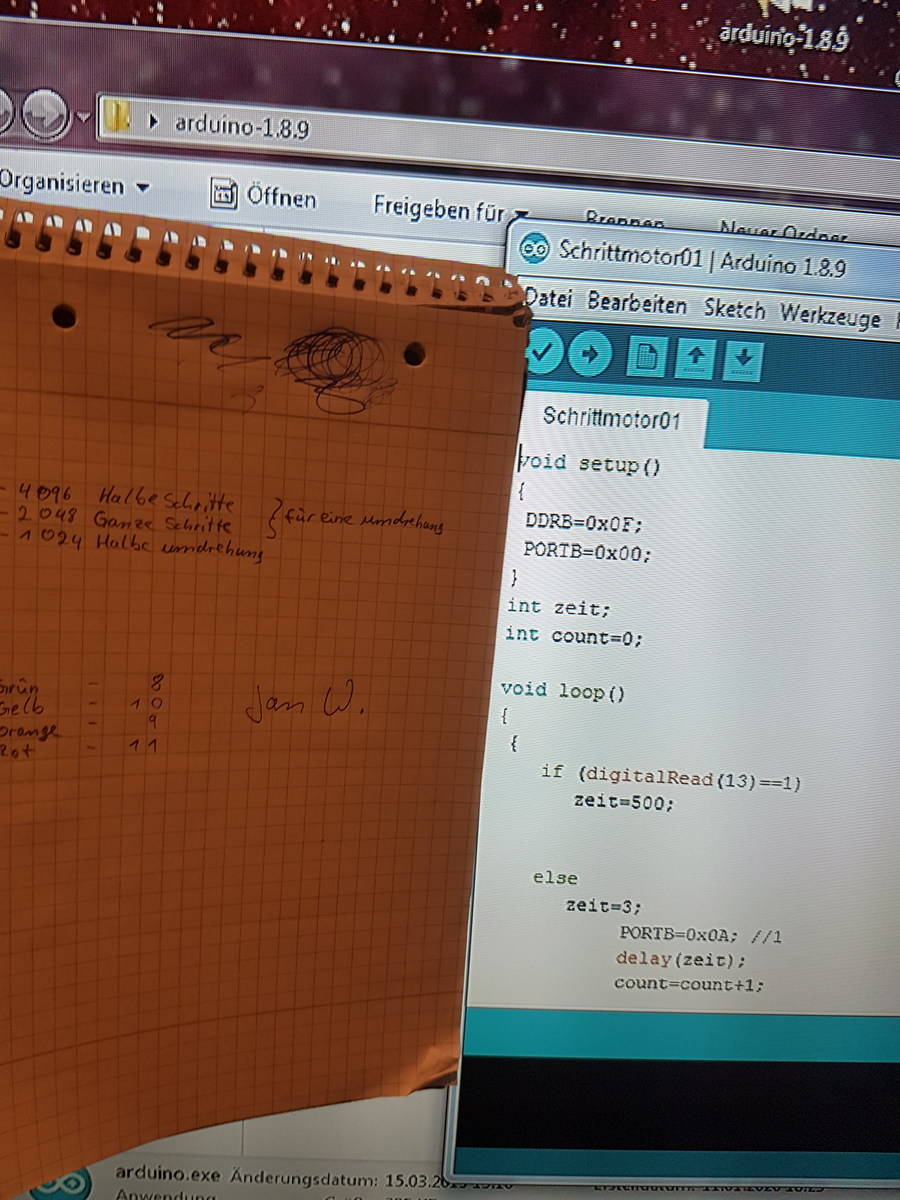
Mein Bildschirm ist ok.
Als Beweis, das es MEIN Bildschirm ist, habe ich meinen Namen auf ein
Blatt Paier geschrieben.
Jan W. schrieb:> Was ist daran jetzt verheimlicht?
Ganz einfach: Das ist kein gültiger C++ Code, kann also nicht
kompilieren, kann also den Motor nicht betreiben.
Was auch immer auf deinem Arduino o.ä. läuft, dieser Code ist es nicht.
Habe auf etwas einfacheres gehofft wie z.B. einen Sketch der mir
erzählt, wie ich an die Counterdaten komme, welche in der Variabel
abgelegt sind und diese ausgelesen werden können um den Motor oder das
Programm zu stoppen. Dachte jetzt nicht, das ich hier mit Frequenzen und
klein Omega arbeiten soll. Kreisfrequenzen passen da irgendwie nicht zu.
Aber das hat man davon, wenn man als Neuling eine banale Frage stellt,
wird alles hinterfragt und als eventueller Lügner/Heimlichtuer
hingestellt...
Macht man das bei einfachen Fragen so?
Dachte, das hier geholfen wird...
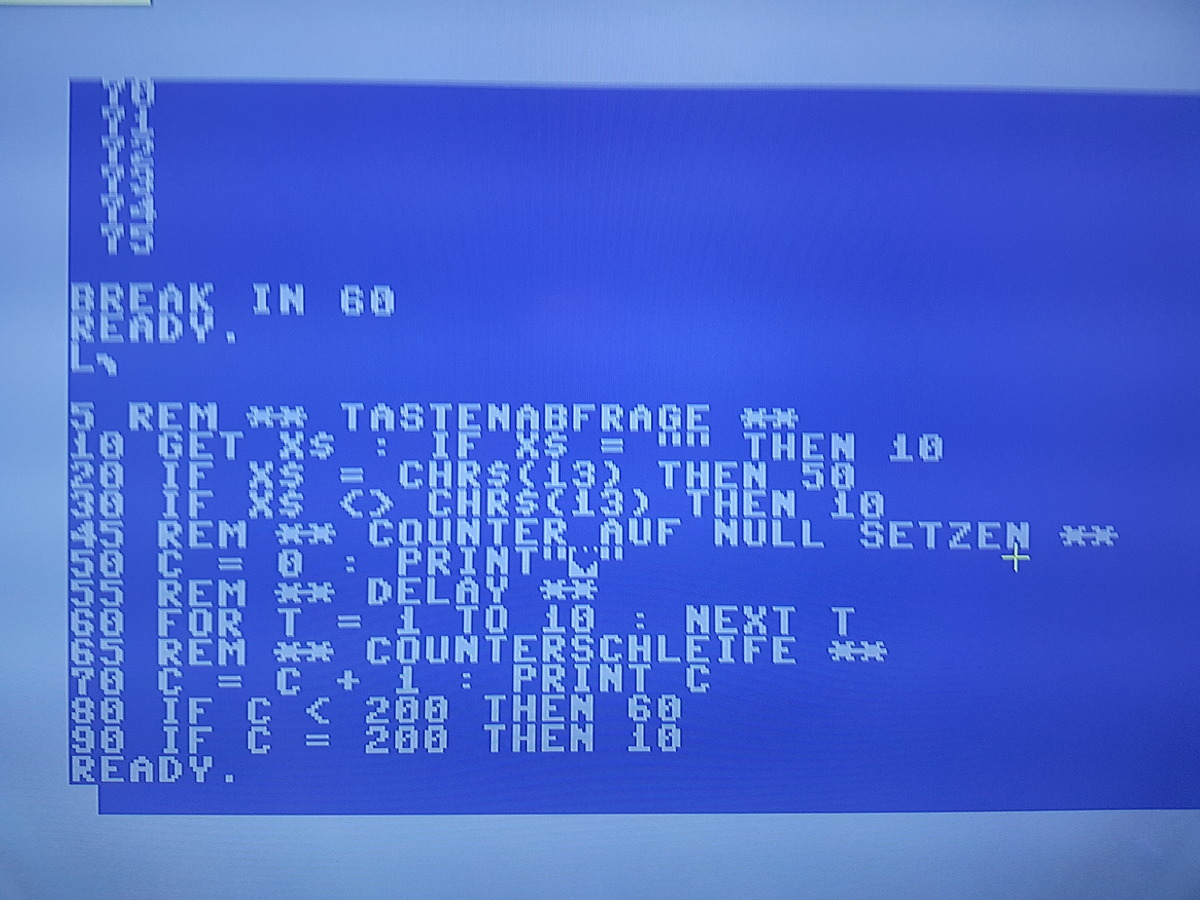
Währe es in BASIC vom Commodore64, währe es für mich kein Problem aber
dies hier ist anders. Der Aufbau, die Abfrage, und und und...
Ist halt kein BASIC
Jan W. schrieb:> Wäre es in BASIC vom Commodore64, währe es für mich kein Problem aber> dies hier ist anders. Der Aufbau, die Abfrage, und und und...>Jan W. schrieb:> Ist halt kein BASIC
Programmieren ist unabhängig von der (Programmier-)Sprache.
Um das von die geschilderte Problem zu lösen, solltest du dir einen
Ablaufplan aufmalen.
Der gilt sprachübergreifend (zumindest für prozedurale Sprachen).
Pseudocode:
In der Loop:
liegt am Pin High an? ==> setze einen Merker
ist der Merker gesetzt?
==> mache nächsten Schrittmotor-Schritt (und das restliche Geraffel)
wurde Schritt-Nummer 200 oder höher ausgeführt? ==> Setze Merker zurück
Das darfst du jetzt als Ablaufplan aufmalen (Papier und Stift hast du ja
offensichtlich).
Kann noch jemand anderes einen Blick auf den Code werfen und mir
bestätigen oder widersprechen, wenn ich sage, dass das kein syntaktisch
korrekter C-Code ist?
mMn ist der gesamte Code in der void loop() in einem sinnlosen Block
eingeklammert (gut, das ist an der Stelle egal) dafür fehlen beim
if...else sämtliche notwendigen Klammern.
Wie kann das kompilieren?
Thomas R. schrieb:> Helmut -. schrieb:> Ausserdem ist ein = zuviel.>> und wo soll das sein??
Ich hoffe das soll ein Trollversuch sein. Wenn dann ist das ganze '==1'
überflüssig
Jan W. schrieb:> {> if (digitalRead(13)==1)
müsste man schon mal gegeneinander tauschen
1
>if(digitalRead(13)==1)
2
>{
Jan W. schrieb:> else
// hier fehlt eine "{"
> zeit=3;> PORTB=0x0A;> delay(zeit);> count=count+1;>> PORTB=0x09;> delay=(zeit);> count=count+1;>> PORTB=0x05;> delay(zeit);> count=count+1;>> PORTB=0x06;> delay(zeit);> count=count+1;
// und hier "}"
Was natürlich sinnfrei ist, da immer alle vier Schritte azsgeführt
werden.
Ob das delay() auch mit Variablen funktioniert, weiß ich nicht, da ich
sowas nicht benutzte (es sei denn, es handelt sich um das Delay eines
RTOS/Betriebssystems).
Richtig formatiert - und das mach auch die Arduino-IDE, sieht es so aus:
1
voidsetup()
2
{
3
DDRB=0x0F;
4
PORTB=0x00;
5
}
6
7
intzeit;
8
intcount=0;
9
10
voidloop()
11
12
{
13
{
14
if(digitalRead(13)==1)
15
//Kein Plan zum stopen und counter einzusetzen
16
17
else
18
zeit=3;
19
20
PORTB=0x0A;
21
delay(zeit);
22
count=count+1;
23
24
PORTB=0x09;
25
delay=(zeit);
26
count=count+1;
27
28
PORTB=0x05;
29
delay(zeit);
30
count=count+1;
31
32
PORTB=0x06;
33
delay(zeit);
34
count=count+1;
35
36
if(count<200)// Schleife wiederholen ?!
37
38
}
39
40
}
Und korrekt compiliert ird das nicht:
C:\Users\Dieter\Documents\Arduino\sketch_jan12a\sketch_jan12a.ino: In
function 'void loop()':
sketch_jan12a:17:7: error: expected primary-expression before 'else'
else
^~~~
sketch_jan12a:25:18: error: assignment of function 'void delay(long
unsigned int)'
delay = (zeit);
^
sketch_jan12a:25:18: error: cannot convert 'int' to 'void(long unsigned
int)' in assignment
sketch_jan12a:38:5: error: expected primary-expression before '}' token
}
^
exit status 1
expected primary-expression before 'else'
STK500-Besitzer schrieb:> Ob das delay() auch mit Variablen funktioniert
Würde ich das delay erst nach allen 4 setzen, so läuft es in den 4 sehr
schnell und macht erst nach den 4 eine verzögerung.
So hat jeder Schritt seine eigene verzögerung, läuft daher rund und
würde nicht nach jedem 4.'ten stottern.
Hugo H. schrieb:> Und korrekt compiliert ird das nicht:
Danke!
Womit wir wieder bei
Jan W. schrieb:> c r schrieb:> Was auch immer auf deinem Arduino o.ä. läuft, dieser Code ist es nicht.>> Doch !
Wären. Nein, kann er nicht. Der läuft nirgends. Du übersiehst irgendwo
eine Fehlermeldung, die dir sagt, dass das Kompilieren und Hochladen
fehlgeschlagen ist.
c r schrieb:> Und das kompiliert? Schlag mal nach, wie die Klammern bei if...else in C> gesetzt werden. So macht das keinen Sinn.
Lass dich nicht durch die Einrückungen irritieren. Die sind dem Compiler
egal.
Hugo H. schrieb:> Und korrekt compiliert ird das nicht:
Dann solltest du vielleicht das
1
zeit=500;
aus dem Photo nicht unterschlagen.
Jan W. schrieb:> 20200112_131229.jpg
Jan W. schrieb:> Würde ich das delay erst nach allen 4 setzen, so läuft es in den 4 sehr> schnell und macht erst nach den 4 eine verzögerung.>> So hat jeder Schritt seine eigene verzögerung, läuft daher rund und> würde nicht nach jedem 4.'ten stottern.
Wie du dein Programm aufbaust, ist mir egal, da es deinen Anforderungen
genügen soll.
Irgendwie kümmerst du dich um nebensächliche Details statt mal das
Grundproblem in Angriff zu nehmen.
PS: ich bin auch schon länger Ü40, und bringe mir gerade erfolgreich die
(C-)Programmierng unter Linux bei.
Wolfgang schrieb:> Lass dich nicht durch die Einrückungen irritieren. Die sind dem Compiler> egal.
Ich weiß, die sind mir beim Versuch einen Sinn in der Klammersetzung zu
finden auch garnicht aufgefallen.
Wolfgang schrieb:> Dann solltest du vielleicht daszeit=500; aus dem Photo nicht> unterschlagen.
Das Foto ist mir Wurscht. Das "zeit = 500;" hat nichts (aber auch gar
nichts) mit der Übersetzbarkeit zu tun.
Wolfgang schrieb:> Lass dich nicht durch die Einrückungen irritieren. Die sind dem Compiler> egal.
Du bist echt ein Held. Das soll helfen, die Lesbarkeit (und
Zusammenhänge) zu verdeutlichen. Wer das nicht rafft sollte besser Bingo
spielen :-)
Jetzt - nur für Dich - was soll das bewirken:
Hugo H. schrieb:> Das "zeit = 500;" hat nichts (aber auch gar nichts) mit der> Übersetzbarkeit zu tun.
Der if Block muss entweder explizit einen leeren Codeblock {} enthalten,
oder eine primary expression, ohne die Zuweisung fehlt beides.
Spätestens im else Block geht ohne {} aber nichts mehr
c r schrieb:> Der if Block muss entweder explizit einen leeren Codeblock {} enthalten,> oder eine primary expression, ohne die Zuweisung fehlt beides.
ein ";" würde schon reichen, ist aber nicht so aussagekräftig wie ein
Codeblock.
c r schrieb:> Spätestens im else Block geht ohne {} aber nichts mehr
Den If - Else Block habe ich in {} gesetzt.
Würde ich das Else allein in {} setzen, so schreit das nach einem If,
welches nicht gesetzt wurde.
Die Variable zeit=500 habe ich als Tester. Leider ist das nicht der
gewünschte effekt.
c r schrieb:> Der if Block muss entweder explizit einen leeren Codeblock {} enthalten,> oder eine primary expression, ohne die Zuweisung fehlt beides.
Wo steht das?
Hugo H. schrieb:> Du bist echt ein Held. Das soll helfen, die Lesbarkeit (und> Zusammenhänge) zu verdeutlichen. Wer das nicht rafft sollte besser Bingo> spielen :-)
Falsche Einrückungen, die nichts mit dem zu tun haben, was der Compiler
sieht, sind eher irreführend.
Die ganzen Portzuweisungen/Delay im Eröffnungspost/Screenshot sieht der
Compiler nicht als Bestandteil der if-else-Struktur.
Wie stelle ich es also an, das:
1. Programm wartet auf Tastendruck
2. Taste betätigt
3. Motor dreht und Programm zählt seine Schritte
4. Schritte nicht erreicht zurück zu 3.
5. Schritte erreicht, Motor stoppt und zurück zu 1.
Ich komm nicht drauf... ?
Wolfgang schrieb:> Falsche Einrückungen, die nichts mit dem zu tun haben, was der Compiler> sieht, sind eher irreführend.
Ja.
Wolfgang schrieb:> Die ganzen Portzuweisungen/Delay im Eröffnungspost/Screenshot sieht der> Compiler nicht als Bestandteil der if-else-Struktur.
Ja. Deswegen sollten die auch nicht eingerückt sein. Gut erkannt.
Jan W. schrieb:> Den If - Else Block habe ich in {} gesetzt.> Würde ich das Else allein in {} setzen, so schreit das nach einem If,> welches nicht gesetzt wurde.
Nochmal: Zieh dir ein beliebiges Codebeispiel zu if else in C++ rein.
Deine Klammern ergeben keinen Sinn.
Hugo H. schrieb:> Wo steht das?
Beispielsweise in deiner Fehlerausgabe oben
Jan W. schrieb:> Wie stelle ich es also an, das:>> 1. Programm wartet auf Tastendruck> 2. Taste betätigt> 3. Motor dreht und Programm zählt seine Schritte> 4. Schritte nicht erreicht zurück zu 3.> 5. Schritte erreicht, Motor stoppt und zurück zu 1.>> Ich komm nicht drauf... ?
Garnicht, ohne deinen bestehenden Code zu fixen.
c r schrieb:> Beispielsweise in deiner Fehlerausgabe oben
Nochmal für Dich: Wo steht dass
c r schrieb:> Der if Block muss entweder explizit einen leeren Codeblock {} enthalten,> oder eine primary expression, ohne die Zuweisung fehlt beides.
Nicht hier - sondern generell?
Hugo H. schrieb:> Nochmal für Dich: Wo steht dassHugo H. schrieb:> C:\Users\Dieter\Documents\Arduino\sketch_jan12a\sketch_jan12a.ino: In> function 'void loop()':>> sketch_jan12a:17:7: error: expected primary-expression before 'else'>> else>> ^~~~Hugo H. schrieb:> Nicht hier - sondern generell?
Keine Ahnung. In der C-Spezifikation wohl.
Jan W. schrieb:> Wie stelle ich es also an, das:>> 1. Programm wartet auf Tastendruck> 2. Taste betätigt> 3. Motor dreht und Programm zählt seine Schritte> 4. Schritte nicht erreicht zurück zu 3.> 5. Schritte erreicht, Motor stoppt und zurück zu 1.>> Ich komm nicht drauf... ?
Wie würde der Sketch dazu aussehen?
c r schrieb:> Jan W. schrieb:>> Wie stelle ich es also an, dass:>>>> 1. Programm wartet auf Tastendruck>> 2. Taste betätigt>> 3. Motor dreht und Programm zählt seine Schritte>> 4. Schritte nicht erreicht zurück zu 3.>> 5. Schritte erreicht, Motor stoppt und zurück zu 1.>>>> Ich komm nicht drauf... ?>> Gar nicht, ohne deinen bestehenden Code zu fixen.
alles in der Loop makrieren und die Entf-Taste drücken ;)
Der Pseudocode klingt nach eine GOTO-Verwender.
Wie würdest du das denn in BASIC schreiben?
Es gibt für Arduino Beispielcode für Schrittmotoren.
Dein Code kann nicht funktionieren und die IDE kompiliert das auch
nicht, bzw. bringt eine Fehlermeldung.
// Die obere Zeile (zeit=500) ist soweit ohne belang
15
16
17
else
18
19
zeit=3;
20
PORTB=0x0A;//1
21
delay(zeit);
22
count=count+1;
23
24
PORTB=0x09;//2
25
delay(zeit);
26
count=count+1;
27
28
PORTB=0x05;//3
29
delay(zeit);
30
count=count+1;
31
32
PORTB=0x06;//4
33
delay(zeit);
34
count=count+1;
35
}
Code mit eingebautem Counter und auf Tastendruck wartend seine Runden
macht und danach wieder in Wartestellung geht ?!?
Beispiel siehe Commodore BASIC Bild
Die Diskussion scheint etwas chaotisch zu verlaufen, so wie ich das sehe
gilt folgendes:
- der Code aus dem ersten Post funktioniert nicht, Hugo hat ihn ja
kopiert und kompiliert, siehe Fehlermeldungen in seinem Post. Es fehlen
Anweisungen im if(digitalRead==...) oben und im letzten if(count<200)
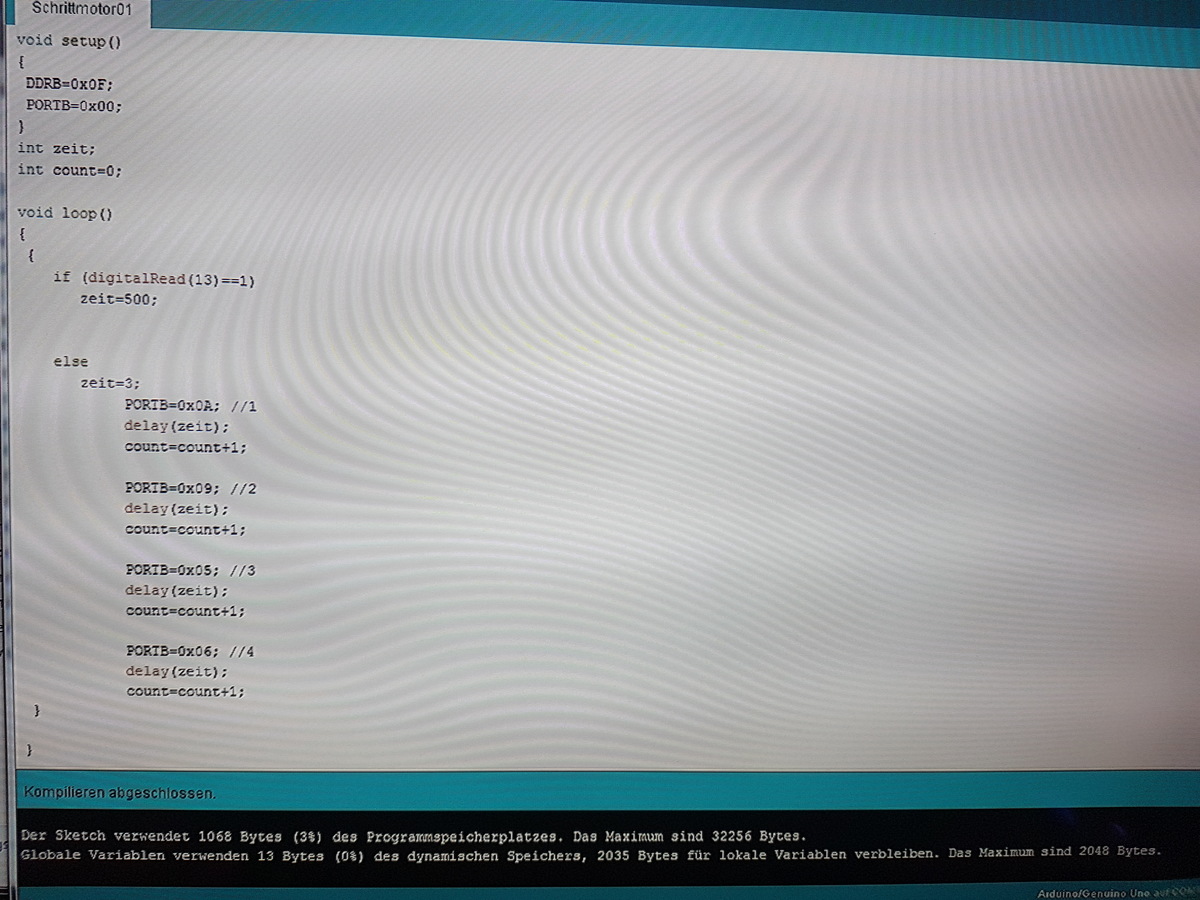
- Der Code aus dem Handyfoto im zweiten Post hingegen funktioniert, tut
aber nicht was du gerne hättest. Hier steht jeweils mindestens eine
Zeile in jeder if()-Anweisung, der code ist also syntaktisch korrekt.
- Versuche bitte den nochmal 1:1 (wirklich 1:1) abzutippen oder wie
vorgeschlagen einen mobilen Hotspot vom Handy einrichten (dein
Handy-Internet per WLAN an den PC freigeben also, gibt es genug
Anleitungen im Netz für Smartphones)
EDIT: Ok immerhin ist das jetzt der echte Code aus dem Handyfoto, das
ist besser.
Damit der Code korrekt funktioniert muss er besser geklammert werden.
Nach loop(){{ ... }} kommen 2 Klammerpaare, eines ist überflüssig.
Nach if()... else ... kommt jeweils keine Klammer, das ist fatal. Nur
die 1 nächste Anweisung wird als Teil des Blocks interpretiert. Beim
else heißt das also
1
...
2
else
3
zeit=3;//Teil des else-Blocks
4
PORTB=0x0A;//*nicht Teil des else-Blocks, wird immer ausgeführt*
5
//übrigens völlig unabhängig von Einrückung, nur von {}
6
// und zu weit eingerückt, unübersichtlich
wird nur konditional ausgeführt, die Zeilen danach die die Schritte
ausführen aber immer!
Aktuell sollte also der Motor schnell drehen wenn man nichts drückt und
langsamer solange der Pin mit dem Taster high ist. Ist das so?
Lenny D. schrieb:> Aktuell sollte also der Motor schnell drehen wenn man nichts drückt und> langsamer solange der Pin mit dem Taster high ist. Ist das so?
Falsch. Er ist langsam, wenn kein HIGH ist und schnell, wenn HIGH ist
Habe mein Handy nun über die Fritzbox mit USB über Theatering oder sowas
eingerichtet...
Lenny D. schrieb:> Aktuell sollte also der Motor schnell drehen wenn man nichts drückt und> langsamer solange der Pin mit dem Taster high ist. Ist das so?
Er ist Langsam, wenn nichts gedrückt ist und schnell, wenn gedrückt ist.
Warum das genau anders herum ist, weis ich auch nicht.
Hm interessant entweder habe ich einen Denkfehler oder dein Taster ist
zB gegen Masse und nicht gegen 5V. Wie ist der Taster angeschlossen? Hat
er einen Pullup/Pulldown-Widerstand oder undefinierten Pegel wenn nicht
betätigt?
Wenn der Taster nach +5V betätigt und im offenen Zustand ein Pulldown zu
GND existiert müsste dieser Code hier (fast) wie gewünscht
funktionieren, siehe Kommentare.
Code compiliert OK, Funktional ungetestet:
1
intzeit;//Deklarationen würde ich vor erster Funktion schreiben
2
intcount=0;
3
4
5
voidsetup()
6
{
7
DDRB=0x0F;
8
PORTB=0x00;
9
}
10
11
12
voidloop(){
13
if(digitalRead(13)==1){
14
//Pin 13 ist HIGH -> Motor soll mit 200-Schritt-Abfolge beginnen
15
count=0;//am einfachsten indem man Counter zurücksetzt
16
//TODO: darüber nachdenken was bei mehrfachem Betätigen, Taster halten und bei Prellen passiert
17
//aktuell: count=0 wird immer wieder ausgefürt werden, solange Taster HIGH
18
// -> Bewegung beginnt erst mit Loslassen des Tasters
19
20
//keine Motor-Bewegung, kein Delay -> loop() wird sofort wieder durchlaufen bis Taster losgelassen
21
}
22
else{
23
//Pin 13 ist LOW -> entweder soll Bewegung gestartet werden bis count=200 oder wenn
24
// count bereits > 200, soll nichts passieren bis Taster erneut gedrückt.
25
if(count<200){
26
// Motor soll sich drehen, also machen wir pro Iteration zB 4 Schritte:
@ Jan
Es scheint mir ein bisschen schwierig Dir einen Rat zu geben.
Das liegt daran, dass Du teilweise ein wenig zu wissen scheinst,
andererseits aber auch einige Grundlagen in C(++) nicht.
Ausserdem scheinst Du im Moment noch Schwierigkeiten damit zu haben,
Vorgänge die unabhängig voneinander sind gedanklich vorzustellen und
irgendwie schriftlich oder bildhaft vorzustellen.
An sich ist nämlich, das Problem ganz einfach zu lösen. Man muss nur
wissen wie :-)
Aber der Ablauf des Threads und Dein Verhalten hat die Leute auch ein
wenig unlustig gemacht, Dir was zu erklären oder Dir einfach die Lösung
hinzuschreiben. Abgesehen davon, liest sich Deine Frage so, dass man Dir
relativ viele Dinge auf einmal erklären müsste. Das fängt bei der
Codeformatierung schon an, die allein schon einige Klarheit bringen
könnte. Das Wesentliche ist aber daran, dass Dir vorläufig die
"Denkweise" fehlt um zwei in gewisser Weise gleichzeitig ablaufende
Vorgänge zu beschreiben (sei es in der Form eines Textes in natürlicher
Sprache oder eine Skizze, sei es in der Form von Code). Das kann man
zwar erklären, aber erfahrungsgemäß hilft es eigentlich nur an dem
Knochen mal herumzukauen, selbst wenn dabei keine Lösung ensteht.
Es bleiben daher im Moment nur zwei Möglichkeiten, denke ich.
1. Du lernst zunächst erstmal anhand von sehr einfachen Beispielaufgaben
weiter C(++). Du schiebst das Projekt insgesamt erstmal auf.
2. Du teilst das Projekt in zwei Teile au, die Du später zusammenführst.
a) Reaktion auf die Tasterbetätigung mit einer LED anstelle des
Schrittmotors. Dabei wirst Du feststellen, dass Du einen Fall des
Ablaufs noch nicht berücksichtigt hast.
b) Steuerung des Schrittmotors. Dabei wirst Du vermutlich zunächst auf
eine sehr simple Lösung kommen, die sich aber nicht einfach mit a)
zusammenführen lässt. Es wäre gut, wenn Du erstmal so weit gehst um das
Problem selbst zu "erleben" und dann eine gezieltere Frage stellen
kannst.
Als direkten Hinweis möchte ich Dir Vorschlagen, mal über Schleifen in
C(++), insbesondere do-while- und while-Schleifen nachzulesen und
einfach mal zu versuchen deine Basic-Varianten mit goto als solche
Schleifen auszudrücken.
Ich kann mir vorstellen, dass meine Vorschläge Dir möglicherweise als
unnötige Umwege erscheinen und sie Dich vielleicht frustrieren, weil es
scheinbar "nicht weiter geht" damit. Aber vielleicht kannst Du mir doch
glauben, dass solche Versuche und die Fehler die man dabei macht, eine
sehr wertvolle Lernerfahrung sind. Das haben alle guten Programmierer
einmal durchgemacht und es ist absolut keine Schande.
Erwäge das doch bitte einmal in Ruhe.
Viel Erfolg.
TO geht auf Hinweise auf grundlegendste Fehler im Code nicht ein, selbst
wenn jemand die Komplettlösung liefert, wird er keine Ahnung haben,
warum es funktioniert und was vorher falsch war.
Na danke... Werde auf Theor's Rat eingehen und mich schlau machen.
Wie oben beschrieben bin ich ein Newbie.
Das ich einen pinMode(pin, typ) auch besetzen kann weis ich auch.
Fand es schade, das man hier am Anfang behauptete, das ich Schüler wäre
und irgendwelche Tatsachen verheimliche... Diffamierungen sind schei**
!!
Von cr
>selbst wenn jemand die Komplettlösung liefert, wird er keine Ahnung haben
Finde dieses Zitat schon ziehmlich anmaßend und frech !!!
Werde mich anders behelfen da hier ....... Naja...
Wolfgang schrieb:> Der ist immer noch irreführend eingerückt.
p.s.
Rufe in der Arduino IDE im Menü Werkzeuge mal die Funktion
Automatische Formatierung auf.
Dann sollte dir klar werden, wo die Formatierung nicht zum Inhalt
passen.
Jan W. schrieb:> Finde dieses Zitat schon ziehmlich anmaßend und frech !!!
Ich finde es anmaßend und frech eine Frage zu stellen und die Antworten
zu ignorieren. Immerhin investieren hier Fremde unentgeltlich Zeit in
deine Probleme.
Jan W. schrieb:> Werde mich anders behelfen da hier ....... Naja...
Dir hilft nur auf den Arsch setzen und C++ Grundlagen lernen.
Jan W. schrieb:> Na danke... Werde auf Theor's Rat eingehen und mich schlau machen.>> Wie oben beschrieben bin ich ein Newbie.>> Das ich einen pinMode(pin, typ) auch besetzen kann weis ich auch.>> Fand es schade, das man hier am Anfang behauptete, das ich Schüler wäre> und irgendwelche Tatsachen verheimliche... Diffamierungen sind schei**> !!>> Von cr>>selbst wenn jemand die Komplettlösung liefert, wird er keine Ahnung haben>> Finde dieses Zitat schon ziehmlich anmaßend und frech !!!>>> Werde mich anders behelfen da hier ....... Naja...
Ich verstehe Dich, denke ich.
Allerdings würde ich Dir raten, die Bezeichnung als Schüler nicht allzu
sehr zu dramatisieren.
Erst einmal ist Schüler sein, an sich nichts Schlimmes, oder? Und dann
lernen intelligente Menschen ihr Leben lang; wenn auch formal nicht als
"Schüler", so doch faktisch.
Ich denke auch, dass das Wort "verschweigen" nicht allzu sehr
überbewertet werden darf. Zwar hat es auch eine negative Bedeutung, aber
die Unterstellung ist hier nicht auf bösartige Motive gerichtet sondern
auf unbekannte Motive.
Insgesamt, wenn auch unangenehm, würde ich Diffamierung doch eher für
nicht gegeben halten. Der Ton in diesem Thread ist vergleichsweise
recht moderat.
Im allgemeinen ist ein rauher Ton eher ein Zeichen dafür, dass man sich
- mit Verlaub - irgendwie falsch verhalten hat. (Das gilt allerdings
nicht immer und bei manchen Antwortern hier im Forum garnicht).
Du solltest auch bedenken, dass hier Fragesteller der verschiedensten
Schattierungen erscheinen. Biite fasse das Folgende als einfache
Beobachtung auf, nicht als Versuch Dich zu erniedrigen: Deine ersten
Posts machen, auch bei wohlwollender Interpretation, den Eindruck,
sorry, eines Schülers, der irgendwie in Zeitdruck geraten ist, der
morgen noch eine Aufgabe abgeben muss. Leider stellt sich hier in
solchen Fällen häufig heraus, dass nicht viel gelernt wurde.
Bei allem menschenlichen Respekt muss ich auch leider sagen, dass Du,
wohl unabsichtlich, den Anschein erweckst, als wenn Du Dich im Moment
stark übernimmst und einen eher fordernden Ansatz in der Kommunikation
hast.
Und ich vermute, Du kannst dem zustimmen, dass Deine Kenntnisse und
Erfahrungen vergleichsweise begrenzt sind.
Dazu kommt, dass Du bisher keinerlei Versuch einer Erklärung Deiner
Gedankengänge und Entwürfe unternommen hast, und auch keinerlei Analyse
(und sei sie noch so falsch) geliefert hast. Das erweckt den Anschein,
als wenn Du selbst, nochmal sorry, nichts leisten willst.
Solche Kritik hinzunehmen, muss einem Erwachsenen der im Leben steht,
sehr hart ankommen. Andereseits, wer von uns - und ich sicher auch nicht
- kann schon von sich sagen, dass er alles schon weiß und alles schon
kann. Jeder von uns muss ab und zu, auch im sozialen Bereich - mal eine
Kröte schlucken. Das ist menschlich. :-)
Man kann nur versuchen sich selbst treu zu bleiben und gleichzeitg auch
die andere Seite zu sehen. Man muss nicht aller Kritik zustimmen (Deine
Kritiker sind auch nur Menschen), aber es lohnt sich doch erstaunlich
oft, zumindest mal über anderer Leute Aussagen nachzudenken.
In dem Zusammenhang rate ich Dir wärmsten einemal den Artikel
https://www.mikrocontroller.net/articles/Netiquette und die darin
verlinkten Seiten.
Mit guten Wünschen, insbesondere weiterem Erfolg ...
Jan W. schrieb:> Wie stelle ich es also an, das:>> 1. Programm wartet auf Tastendruck> 2. Taste betätigt> 3. Motor dreht und Programm zählt seine Schritte> 4. Schritte nicht erreicht zurück zu 3.> 5. Schritte erreicht, Motor stoppt und zurück zu 1.>> Ich komm nicht drauf... ?
Danke für den Sketch...
Leider ist der für mein Uno oder Nano dafür nicht geeignet.
Fehlermeldung: Fehler beim Kompilieren für das Board.
Mittlerweile fuchse ich mich da rein.
Habe es bisher soweit, das der Motor dreht, sobald der Taster
geschlossen ist und aufhört, wenn er losgelassen wird.
Nun fehlt mir nur noch das er weiter dreht, solange der counter nicht
erreicht ist.
Jan W. schrieb:> Fehlermeldung: Fehler beim Kompilieren für das Board.
Das ist leider nicht sehr aussagekräftig. Die Arduino IDE bietet in den
Einstellungen ausführlichere Ausgaben beim Kompilieren und Hochladen an,
aktivier das mal.
Dann
1
#include<Stepper.h>
2
Stepperstepper(200,8,9,10,11);
3
boolbuttondown;
4
5
voidsetup(){
6
// set the speed of the motor to 30 RPMs
7
stepper.setSpeed(30);
8
}
9
10
voidloop()
11
{
12
boolbuttonnow=digitalRead(13);
13
if(buttonnow&&!buttondown)
14
{
15
stepper.step(200);
16
}
17
buttondown=buttonnow;
18
delay(10);
19
}
Bei der loop() fehlte der Typ void und noch 2 Arduino spezifische
Fehler, probier den mal.
Das kompiliert auf jeden Fall schonmal.
Jan W. schrieb:> Habe es bisher soweit, das der Motor dreht, sobald der Taster> geschlossen ist und aufhört, wenn er losgelassen wird.
Wenn du den Code von "c r" nicht verwenden willst / kannst, dann zeig
noch mal deinen. Die Abfrage der Schrittanzahl gehört nach der
Tastenabfrage. Es gibt allerdings noch weiter Möglichkeiten.
@Jan:
Das delay() sieht erstmal einfach für so eine Aufgabe aus, führt aber zu
dem Problem das du siehst: währed des delay rennt der µC nur im Kreis
und macht nix anderes.
Sinnvoller ist es erstmal diese zwei Aufgaben in Unterprogrammen zu
definieren, z.B.: checkButtons() und processStepper(). Diese werden
ständig in loop() aufgerufen und dürfen nicht blockieren.
In checkButtons() ist das einfach, digitalRead wird schnell ausgeführt,
das kann man einfach aufrufen und auswertern.
Das processStepper() darf nicht mit delays blockieren, hier ist eine
mögliche Lösung eine State Machine. D.h., die Funktion wird aufgerufen,
guckt in welchem Zustand sie ist, macht was und ist erstmal fertig. Für
das warten musst du dann mit millis() die aktuelle Zeit abfragen und
wenn die Zeit für einen Schritt abgelaufen ist auf den nächsten Schritt
weiterschalten.
Beispiel schnell zusammengehackt, nicht getestet:
Johannes S. schrieb:> Das delay() sieht erstmal einfach für so eine Aufgabe aus, führt aber zu> dem Problem das du siehst: währed des delay rennt der µC nur im Kreis> und macht nix anderes.
Er soll ja in dieser Zeit auch nichts anderes machen. Sobald ein Tadter
gedrückt wurde, soll das Programm starten und der Motor laufen, auch
nach dem loslassen des Tasters. Während die Schleife läuft, zählt ein
Counter jeden Schritt von 0-199. Nachdem der Counter sein Soll erreicht
hat, stoppt der Motor und das Programm wartet wieder auf den Taster.
Bin grad auf Arbeit. Etwas fehlt noch. Aber so ungefähr...
Habs komplett hinbekommen... Dank der einfühlsamen Worte von Theor.
Habe es gestern Abend mit einer While-Schleife erledigt und einer
Abfrage wie weit der Counter ist. Selbst eine LED leuchtet über einen
anderen Pin, solange es läuft.
Werde mir jetzt noch ein paar Gedanken über ein Tipp-Betrieb machen und
dann ist's vollbracht.
Theard kann geschlossen werden.
??