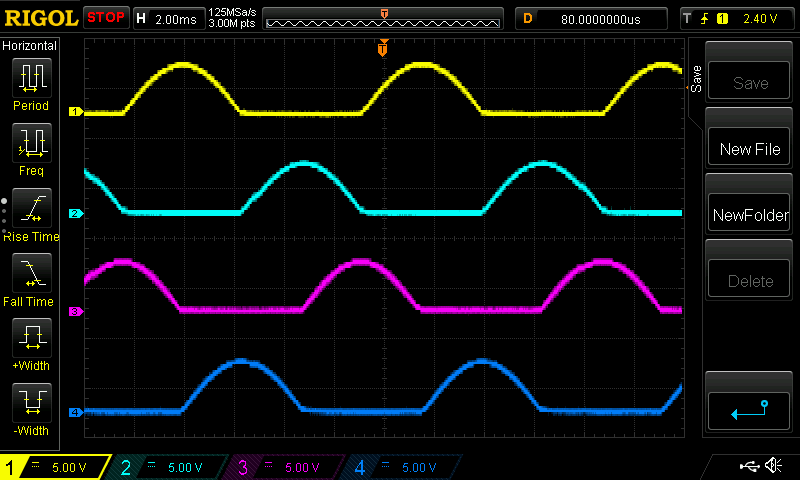
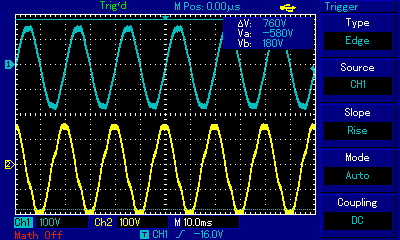
Als Basis für mein Projekt dient: https://www.mikrocontroller.net/articles/3-Phasen_Frequenzumrichter_mit_AVR Die Analyse vom Basisprojekt war für mich der erster Kontakt mit Atmel Mikroprozessor. Um die Sache besser zu verstehen habe ich parallel eine kleine Doku für PWM erstellt. Bei der Analyse vom Basisprojekt habe ich teilweise im Projekt Kommentare eingeführt. Ich bin verblüffend wie einfach(einfach bedeutet gut...) wurde durch Atmel PWM Problematik bewältigt.Im Basisprojekt alle drei Timer laufen im „Phase Correct PWM Mode“. Alle Zähler laufen ständig vom 0 bis TOP (255) und dann vom TOP (255) zum 0. Es entsteht für jeden Timer einen Sägezahnverlauf mit steigenden und fallenden Flanken. Für Jeden Timer sind zwei „Output Compare Register“ A und B zugeordnet. Wenn ein Timerinhalt den Zustand von Compare Register erreicht, wird einen PWM Ausgang gesetzt oder gelöscht. Welche OUT Operation setzen oder löschen bei Fallende Flanke (Timer läuft von Top zum 0) passiert ist,wird vom eingestelltem Modus Abhängig. Out Operation bei der steigender Flanke ist immer das Gegenstück von der Operation bei der fallender Flanke.Im Basisprojekt bei der fallenden Flanke beim Timer Gleichheit mit „Output Compare Register“ A wird der entsprechenden Ausgang (High für Brücke...) gesetzt und vorher Ausgang B (Low für Brücke...) beim Gleichheit mit Register B gelöscht. Wenn Timer 1 den TOP (255) erreicht wird einen Interrupt ausgelöst. Im Interrupt werden die Soll Werte für Sinusverlauf für alle Phasen aus der Tabelle sineTable geholt und nach der Bearbeitung in Output Compare Register A geschrieben. Wert für Register B wird so berechnet: Register A + Totzeit. Meine Änderungen: In File vfdtables.h wird die Definition angeführt: #define MOTOR_2PHASEN Im File wird eine neue sineTable Tabelle mit Sinuswerten für zwei Wicklung vom Motor mit Phasenverschiebung 90° erstellt. Dritte Kolumne in der Tabelle definiert Vorzeichen für Sinuswerten. Die Definition #define MOTOR_2PHASEN gilt mit #include "vfdtables.h" auch im File FrequenzUmrichter.c. Alle Änderungen im File kann man finden nach der Anfrage #ifdef MOTOR_2PHASEN. Beide „Output Compare Register“ A und B haben jetzt den gleichen Modus: setzen bei der fallende Flanke (zählen vom TOP zu 0) von Timer.Aber nur einen Compare Register, abhängig vom Vorzeichen, wird mit dem Sinuswert beschrieben. Beim Plus Vorzeichen wird mit dem Sinuswert Register A beschrieben und Register B mit 0. Umgekehrt beim Minus Vorzeichen wird Register B mit dem Sinuswert beschrieben und Register A mit 0. Oszisignale am PWM Ausgängen (über RC-Tiefpassfilter)zeige ich auf dem Bild. Das angehängte FreqUmrichter2Ph.zip enthält Projekt unten Atmel Studio 6.2. Ein Problem ist noch geblieben. Endstufen … Vielleicht dort findet man eine Idee: Beitrag "Arduino Kondensatormotor Drehzahlsteuerung"
Angehängte Dateien:
-

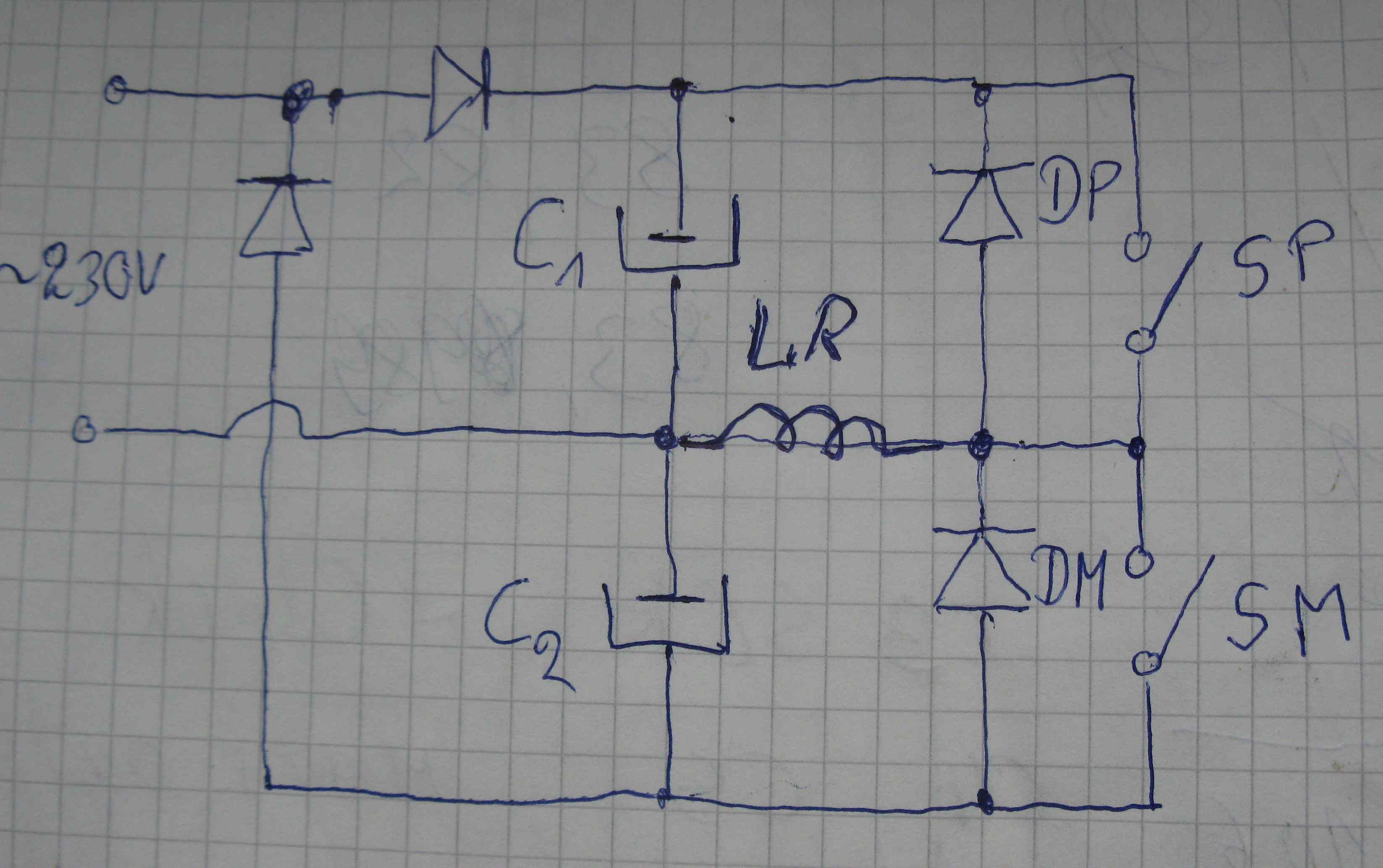
skizze.jpg
200 KB -

GefiltertePWM.png
31 KB
Gut daß du den ersten Link ganz oben/vorne stehen hast. Die Einordnung ist sehr richtig.
"Wechselstrommotor" ist etwas missverständlich. Wenn du einen Asynchronmotor mit Schlupf (z.B. einen Ventilator) steuern möchtest, reicht es aus, nur 2 Endstufen aufzubauen und den Motor zwischen die beiden Ausgänge zu legen. Die resultierende Spannung ist ein korrekter Sinus, mit dem man solche Motoren (oder auch Glühbirnen etc.) steuern kann. Geregelt wird dann weniger die Frequenz, sondern die Spannung, die man über das V/f Verhältnis einstellen kann. Für einen Kondensatormotor fehlt eine weitere Endstufe, da die Hilfswicklung andere Charakteristik als die Hauptwicklung hat. Normalerweise erhält sie über den Kondensator weniger Spannung als die Hauptwicklung und erfordert die 90° Phasenverschiebung. Dem AVR fehlt dafür der 4. Timer. Sowas würde ich deswegen heute mit einem STM32 aufbauen, da deren Advanced Timer vier CC Register haben und es einfach erlaubt, das Prinzip des 3-Phasen Generators auf 4 zu erweitern.
Angehängte Dateien:
-

MAP001.BMP
98 KB
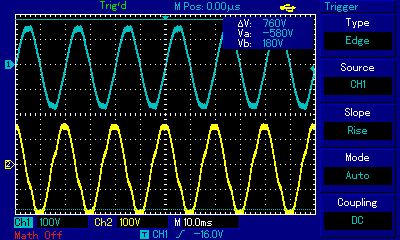
Matthias S. schrieb: > Hilfswicklung andere Charakteristik als die Hauptwicklung hat. Bei meinem Motor beide Wicklungen sind gleich. Kondensator hat Kapazität (es sind zwei Kondensatoren parallel) 170 mikrofarad. Dieses Projekt muss noch erweitert werden um % von der Hauptwicklung Spannung auf Hilfswicklung.
Angehängte Dateien:
-

idealkurven_001.png
7,6 KB
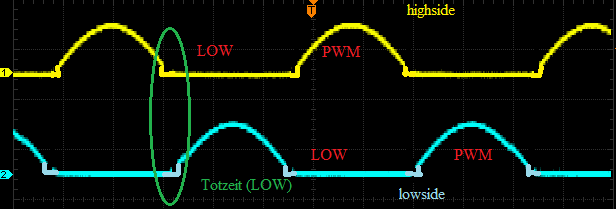
Danke für das Oszillogramm. So mit Totzeiten hätte ich das gerne. Siehe Bild. Für die phasenverschobene genau so. B. P. schrieb: > Kondensator hat > Kapazität (es sind zwei Kondensatoren parallel) 170 mikrofarad. Das ist viel. Drehstrommotor in Steinmetz-Schaltung? https://info.elektro-kahlhorn.de/drehstrommotor-steinmetzschaltung/ LG old.
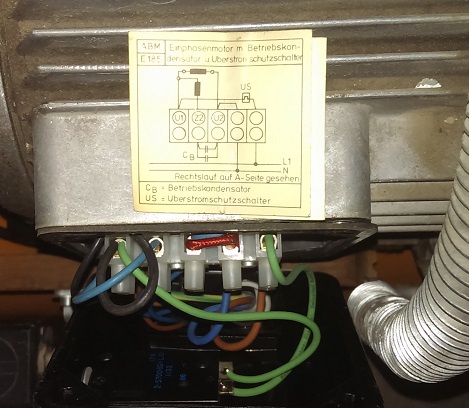
B. P. schrieb: > Bei meinem Motor beide Wicklungen sind gleich. Kondensator hat > Kapazität (es sind zwei Kondensatoren parallel) 170 mikrofarad. Mach doch bitte mal ein Foto des Typenschildes. So grosse Kondensatoren klingt nach Steinmetzschaltung, die du entfernen und dann direkt den Motor mit Drehstrom aus dem FU ansteuern kannst.
Matthias S. schrieb: > So grosse Kondensatoren > klingt nach Steinmetzschaltung Der Motor hat nur zwei Wicklungen.
Angehängte Dateien:
{kind=link}
Habe mal meinen Kaeser Kompressor aufgeschraubt. Das ist tatsächlich ein Kondensatormotor, beschriftet wie im Link erklärt und er hat auch die zwei dicken Kondis Parallel. Werte konnte ich auf die Schnelle nicht lesen. Ich hoffe, dass skorpionx einen ähnlichen Motor hat. LG old.
Wieso "tatsächlich"? Hab nen Leishäckslermotor (Kondensatormotor mit allen Phasen rausgeführt, wegen Links- und Rechtslauf möglich), 2000W in Betriebsart S1, mit Betriebskondensator Der Kondensator war aber glaub ich niemals in der Region von 170µF.
Timo N. schrieb: > Hab nen Leishäckslermotor (Kondensatormotor mit allen Phasen > rausgeführt, wegen Links- und Rechtslauf möglich), 2000W in Betriebsart > S1, mit Betriebskondensator > Der Kondensator war aber glaub ich niemals in der Region von 170µF. Mein Vertikutierer mit ca. 1kW leistung hatte einen 20µF-Kondensator.
Kompressoren kommen gerne mal auf 170μF! Allerdings nicht im Dauerbetrieb sondern zum Beispiel mit 70μF als Betriebskondensator der ständig angeschlossen ist und einem zusätzlichen Anlaufkondensator mit 100μF. Dieser wird dann, wenn der Motor läuft, meist per Fliehkraftschalter weggeschaltet.
Armin X. schrieb: > Dieser wird dann, Der Kaeser läuft drucklos, also ohne Last an. Timo N. schrieb: > Wieso "tatsächlich"? Ich habe an "das Märchen von der Steinmetzschaltung" geglaubt. Harald W. schrieb: > Mein Vertikutierer Ich schätze mal beim Rasenmäher ist das nicht anders. Aber das sind bisher alles Anwendungen die keine Drehzahleinstellung erfordern. Bin mal gespannt wofür skorpionx das braucht. LG old.
Matthias S. schrieb: > Mach doch bitte mal ein Foto des Typenschildes. Hat skorpionx doch schon, eben zufällig gefunden: Beitrag "Re: Diskussion zum Artikel "Single Chip Frequenzumrichter" für den 2. MC Wettbewerb" und folgende Beiträge. Wollte ich Euch nicht vorenthalten. @ skorpionx: Bei der Drehbank brauchst Du sicher einen Bremschopper oder eine Rückspeisung. Bei mir war das nicht notwendig, weil praktisch kaum Schwungmasse vorhanden ist. Ich kann das noch mit viel Zwischenkreiskapazität abfangen. Die Treiberschaltung muss auch die Kurvenform steuern können. Mit der von mschoeldgen geht das nicht. Bei seiner Impulsform tackern highside und lowside beide während jeder Halbwelle. Bei mir tackert highside während der positiven und lowside während der negativen halbwelle. Deshalb ist die, ich nenne es mal PWM-Belastung des Motors, bei mir deutlich geringer. Das bekommst Du ohne separate highside-Versorgungen nicht hin. Bei DC-Motoren macht man das auch so wie ich das tue um einen guten Wirkungsgrad zu erhalten und den Motor weniger PWM-Belastung auszusetzen. Was mschoeldgen da macht ist praktisch ein d-amp ohne Filter. LG old.
Beitrag #6166486 wurde von einem Moderator gelöscht.
Aus der W. schrieb: > Die Treiberschaltung muss auch die Kurvenform steuern > können. Mit der von mschoeldgen geht das nicht. Du hast überhaupt nichts verstanden. Natürlich kann die Treiberschaltung die Kurvenform steuern, ich liefere ja z.B. je nach #define echten Sinusausgang oder 'popo' Kurven. Es hat wirklich keinen Sinn, dir irgendwas erklären zu wollen, wenn du nicht mal die Grundlagen von PWM verstehst. Lies dir in Ruhe den Artikel durch, brenne die Software in einen Arduino, schliesse das LCD und die Taster an. Dann kannst du schon mal mit einem Oszi die PWM Ausgänge anschauen und vllt. begreifen, wie die ganze Sache funktioniert - obwohl ich weiterhin Zweifel daran habe. Meine Testmotoren 'tackern' kein bisschen, sondern laufen lautlos an und freuen sich über die sauberen Sinussignale. Die Ansteuerung ist so sauber, das sie sogar in einem Gerät zum Schallplatten schneiden verwendet wird.
Beitrag #6166610 wurde von einem Moderator gelöscht.
@skorpionx: Es tut mir leid, das der Typ hier wieder aufgetaucht ist. Ich werde, um den Thread nicht zu vermüllen, nicht mehr auf ihn reagieren. Irgendwelche Fragen zu meinem FU beantworte ich aber natürlich gerne.
Beitrag #6166673 wurde von einem Moderator gelöscht.
Beitrag #6166767 wurde von einem Moderator gelöscht.
Beitrag #6166772 wurde von einem Moderator gelöscht.
Beitrag #6167043 wurde von einem Moderator gelöscht.
@skorpionx: Ich bin jetzt mal den Sourcecode durchgegangen, wundere mich aber, warum du dir so viel Mühe gemacht hast. Es wäre ganz einfach, wenn du nur die Tabelle geändert hättest und den dritten Ausgang, den du ja nicht benutzt, einfach nicht aufgebaut hättest. Nicht, das ich es nicht schätze, aber du ersparst dir eine Menge Arbeit.
Matthias S. schrieb: > Es wäre ganz einfach, wenn du nur die > Tabelle geändert hättest und den dritten Ausgang... Nein. Nicht nur das... B. P. schrieb: > Beide „Output Compare Register“ A und B haben jetzt den > gleichen Modus: setzen bei der fallende Flanke (zählen > vom TOP zu 0) von Timer.Aber nur einen Compare Register, > abhängig vom Vorzeichen, wird mit dem Sinuswert beschrieben. > Beim Plus Vorzeichen wird mit dem Sinuswert Register A > beschrieben und Register B mit 0. Umgekehrt beim Minus > Vorzeichen wird Register B mit dem Sinuswert beschrieben > und Register A mit 0.
B. P. schrieb: > Matthias S. schrieb: >> Es wäre ganz einfach, wenn du nur die >> Tabelle geändert hättest und den dritten Ausgang... > > Nein. Nicht nur das... > > B. P. schrieb: >> Beide „Output Compare Register“ A und B haben jetzt den >> gleichen Modus: setzen bei der fallende Flanke (zählen >> vom TOP zu 0) von Timer.Aber nur einen Compare Register, >> abhängig vom Vorzeichen, wird mit dem Sinuswert beschrieben. >> Beim Plus Vorzeichen wird mit dem Sinuswert Register A >> beschrieben und Register B mit 0. Umgekehrt beim Minus >> Vorzeichen wird Register B mit dem Sinuswert beschrieben >> und Register A mit 0. Und was willst du damit sagen?
Interessant ist, wie die PWM für die Sinusform aussieht. Es macht ja einen Unterschied ob Du für einen Sinusmomentanwert zwischen den Rails hin- und her polst oder mit Sollpolarität schaltest. So wie Deine Oszillogramme aussehen, hast Du das ja im Griff. :) LG old.
hinz schrieb: > Und was willst du damit sagen? Ich glaube, das der TE damit plant, die Enstufen 'diagonal' also über Kreuz anzusteuern. Das ist aber hier gar nicht nötig, denn es reicht ja, zwei gegenphasige Sinussignale in die Tabelle zu programmieren und man wäre fertig. Es ist auch ganz ohne Änderung möglich, wenn man die 'PURE_SINE_DRIVE' Option wählt und zwischen 2 Endstufen den Sinus abzapft.
Matthias S. schrieb: > hinz schrieb: >> Und was willst du damit sagen? > > Ich glaube, das der TE damit plant, die Enstufen 'diagonal' also über > Kreuz anzusteuern. Das ist aber hier gar nicht nötig, denn es reicht ja, > zwei gegenphasige Sinussignale in die Tabelle zu programmieren und man > wäre fertig. Es ist auch ganz ohne Änderung möglich, wenn man die > 'PURE_SINE_DRIVE' Option wählt und zwischen 2 Endstufen den Sinus > abzapft. Er, und auch Darius, haben nicht verstanden wie so eine Endstufe an induktiver Last kommutiert.
Matthias S. schrieb: > Es ist auch ganz ohne Änderung möglich, wenn man die > 'PURE_SINE_DRIVE' Option wählt und zwischen 2 Endstufen den Sinus > abzapft. Dann bekommt er doch wegen dem Spannungsverdoppler am Eingang dan 650V auf die Haupt- (oder Hilfswicklung, je nachdem welche er zwischen die 2 Endstufen schaltet). Wie schließt er dann seine andere Wicklung an? An der dritten Endstufe? Seinen Schaltplan würde ich gerne mal sehen. Leider verstehe ich von dem was er geschrieben hat überhaupt nichts (vermutlich ist Deutsch nicht seine Muttersprache, hier wäre Englisch besser gewesen).
Timo N. schrieb: > Wie schließt er dann seine andere Wicklung an? An der dritten Endstufe? Das weiss ich auch nicht, ich habe mir ja nur mal das Programm angesehen. Wie ich oben schon schrieb: Beitrag "Re: Frequenzumrichter für Wechselstrommotor." wäre es sinnvoll, vier Endstufen zu haben und die Wicklungen des Motors aufzutrennen, dann jede Wicklung zwischen zwei Endstufen zu hängen. Damit sollte es ohne Probleme gehen, auch einen Kondensatormotor brauchbar zu steuern.
Matthias S. schrieb: > wäre es sinnvoll, vier Endstufen zu haben und die Wicklungen des Motors > aufzutrennen, dann jede Wicklung zwischen zwei Endstufen zu hängen. > Damit sollte es ohne Probleme gehen, auch einen Kondensatormotor > brauchbar zu steuern. Zweifellos.
hinz schrieb: > Zweifellos. Aber wozu vier Halbbrücken, wenn es zwei genau so tun? Siehe Hardware dort: Beitrag "Re: Arduino Kondensatormotor Drehzahlsteuerung" LG old.
Matthias S. schrieb: > Damit sollte es ohne Probleme gehen, auch einen Kondensatormotor > brauchbar zu steuern. Vorausgesetzt alle 4 Wicklungsanschlüsse sind abgreifbar. Kommt vermutlich nicht so oft vor, weil nach meiner Recherche die meisten kommerziellen VFD für Kondensatormotoren nur 2 Anschlüsse haben (den Kondensator also drin lassen). Aber basteln kann man ja.
Ich sehe nach wie vor nicht viel Sinn darin, einen Kondensatormotor überhaupt steuern zu können. Wo soll man das anwenden? Wenn ich eine ernstzunehmende Maschine habe, ist da schon ein Drehstrommotor drin, oder es hat nicht viel Sinn, überhaupt was zu steuern. Warum sollte ich Rasenmäher, Holzspalter oder Kompressor steuern wollen? Hätte ich da was dran gefunden, gäbe es sicher schon einen Update meines FU mit STM32, aber 'habe Gerät, suche Anwendung' brauche ich nicht.
Beitrag #6169187 wurde von einem Moderator gelöscht.
Aus der W. schrieb im Beitrag #6169187: > Ständerbohrmaschine, Dekupiersäge, Drehbank … und das > Schallplattenschneidgerät oder hast du da einen > Drehstrommotor dran gedengelt? Seufz - wie o.a. sind das Anwendungen, die ich nicht steuern muss. Wer eine Drehbank mit Kondensatormotor hat, tut mir leid und natürlich hat die Plattenschneidemaschine einen 3-Phasenmotor und nix mit Kondensator. Ich finde es übrigens äusserst unfair von dir, wie du jeden Thread kaperst, der was mit Motoren zu tun hat, nur weil du glaubst, davon was zu verstehen. Es geht hier um eine Mod meines FU, und nicht um das Blödsinnsteil, was du da baust.
Matthias S. schrieb: > 3-Phasenmotor und nix mit Kondensator. Lies mal die Überschrift und den Startbeitrag. LG old.
Beitrag #6169208 wurde von einem Moderator gelöscht.
Matthias S. schrieb: > Ich sehe nach wie vor nicht viel Sinn darin, einen Kondensatormotor > überhaupt steuern zu können. Wo soll man das anwenden? Darum geht's halt beim TO (skorpionx) (sofern ich das richtig verstanden habe). Zumindest bei der Tisch/Ständerbohrmaschine, Tellerschleifer, Dekupiersäge und Drehbank kommt es halt nicht selten vor, dass man einen Kondensatormotor drin hat. Grund dafür liegt auf der Hand: Man hat keinen dreiphasigen Anschluss in seiner Werkstatt und neue Leitung legen ist a) nicht möglich (da Mieter) oder b) zu teuer. Da greift man dann zum 1-phasigen Gerät. Von daher sehe ich zumindest z.B. aus Laiensicht den Wunsch nach einer Drehzahlregelung. Bevor ich hier aber in euren Streit reingezogen werde. Ich werde mich nicht positionieren.
Timo N. schrieb: > Zumindest bei der Tisch/Ständerbohrmaschine, Tellerschleifer, > Dekupiersäge und Drehbank kommt es halt nicht selten vor, dass man einen > Kondensatormotor drin hat. > > Grund dafür liegt auf der Hand: Man hat keinen dreiphasigen Anschluss in > seiner Werkstatt und neue Leitung legen ist a) nicht möglich (da Mieter) > oder b) zu teuer. Da greift man dann zum 1-phasigen Gerät. Das ist zwar hier nicht Thema, aber in Amerika bleibt einem garnichts anderes übrig, als die Verwendung von Kondensator- motoren auch mit mehreren kW Leistung z.B. für eine statio- näre Kreissäge, da dort Drehstromanschlüsse nur eher selten zur Verfügung stehen.
Aus der W. schrieb: > So mit Totzeiten hätte ich das gerne. Siehe Bild. > Für die phasenverschobene genau so. Und so schaut die PWM dazu aus: https://www.sciencedirect.com/topics/engineering/pulse-width-modulation Figure 41.21. Pulse-width-modulated (PWM) converter voltage waveforms Matthias S. schrieb: > Seufz - das kann deine Hardware nicht, weil sie nicht Tri-State fähig ist. Meine Tri-State Ansteuerung sieht so aus: Beitrag "Re: Arduino Kondensatormotor Drehzahlsteuerung" Weil ich das noch nicht anders programmieren kann. LG old.
Aus der W. schrieb: > das kann deine Hardware nicht, weil sie nicht Tri-State fähig ist. Du hast nicht im geringsten verstanden wie die Endstufe kommutiert. Dein Tri-State ist schlicht für die Katz.
Beitrag #6174846 wurde von einem Moderator gelöscht.
Ich persönlich kenne kein Drehstromnetz mit Tristate Zuständen. Scheint also für den angegebenen Zweck nicht nötig zu sein. Wenn man aber Tristate haben möchte - selbstverständlich können die Endstufen sowas - machen sie ja auch, wenn die Totzeit gerade läuft. Sonst würde es ja rummsen. Ich jedenfalls stelle mal wieder fest, das da noch eine Menge Grundlagen fehlen und das der Typ den Thread hier weiterhin kapert. Verzieh doch doch bitte in deinen eigenen, Darius. Mist, ich habe mich wieder von dem Typ zu einer Antwort hinreissen lassen. Aber so einen Unsinn unbeantwortet zu lassen, wäre auch nicht richtig.
Beitrag #6174857 wurde von einem Moderator gelöscht.
Beitrag #6174859 wurde von einem Moderator gelöscht.
Beitrag #6174869 wurde von einem Moderator gelöscht.
Beitrag #6174931 wurde von einem Moderator gelöscht.
Beitrag #6174942 wurde von einem Moderator gelöscht.
Beitrag #6174944 wurde von einem Moderator gelöscht.
Harald W. schrieb: > Das ist zwar hier nicht Thema, aber in Amerika bleibt einem > garnichts anderes übrig, als die Verwendung von Kondensator- > motoren auch mit mehreren kW Leistung z.B. für eine statio- > näre Kreissäge, da dort Drehstromanschlüsse nur eher selten > zur Verfügung stehen. Dafür sind doch die FU erfunden worden. Und auch in den USA sind Steuerungen für Kondensatormotoren eher exotisch, sonst wären davon viel mehr auf dem Markt. Entweder reicht also die feste Drehzahl eines Kondensatormotors oder die Amis benutzen genauso FU wie wir.
Beitrag #6174957 wurde von einem Moderator gelöscht.
Beitrag #6174964 wurde von einem Moderator gelöscht.
Beitrag #6174966 wurde von einem Moderator gelöscht.
Beitrag #6174972 wurde von einem Moderator gelöscht.
Beitrag #6174979 wurde von einem Moderator gelöscht.
Beitrag #6174986 wurde von einem Moderator gelöscht.
Beitrag #6174988 wurde von einem Moderator gelöscht.
Beitrag #6175000 wurde von einem Moderator gelöscht.
Beitrag #6175048 wurde von einem Moderator gelöscht.
Beitrag #6176942 wurde von einem Moderator gelöscht.
Matthias S. schrieb: > wenn du nur die > Tabelle geändert hättest Die Tabelle passt nur für 120 Grad Verschiebung. Beim Versuch auf 90 das zu ändern passiert das was man im File sehen kann. Werte grösser als 255...
B. P. schrieb: > Die Tabelle passt nur für 120 Grad Verschiebung. Beim Versuch > auf 90 das zu ändern passiert das was man im File sehen kann. > Werte grösser als 255... Nö. Der Wertebereich bleibt immer bei 0-255, weil das die Werte für die Timer sind. Man muss aber die Sequenz ändern. Geht man die Tabelle von oben bis unten durch, ist z.B. in der ersten Spalte (Phase U) ein Sinus, der bei 128 anfängt (sozusagen Zerocross), um dann eine komplette Sinusperiode bis zum letzten Wert zu bilden. Phase V ist um 120° gegenüber Phase U verschoben, erreicht also die 128 bei Wert[64], Phase W ist bei 240° [128] im Zerocross. Bei 180°[96] z.B. fällt der Wert der ersten Spalte gerade wieder durch die 128. Damit das nochmal klarer wird, habe ich die Gradzahlen mal in die anhängende Tabelle geschrieben, die im Projekt für 'Pure Sine Drive' benutzt wird. Jeder Schritt in der Tabelle entspricht einem Drehwinkel von 1,875°, da SINE_TABLE_LENGTH = 192. Also 360/192 = 1,875
Matthias S. schrieb: > Jeder Schritt in der Tabelle entspricht einem Drehwinkel von 1,875°, da > SINE_TABLE_LENGTH = 192. Für eine Polpaarzahl von Eins. LG old.
Aus der W. schrieb: > Für eine Polpaarzahl von Eins. Nö, sondern für einen kompletten Umlauf im Einheitskreis. Wer den nicht kennt: https://de.wikipedia.org/wiki/Einheitskreis
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.