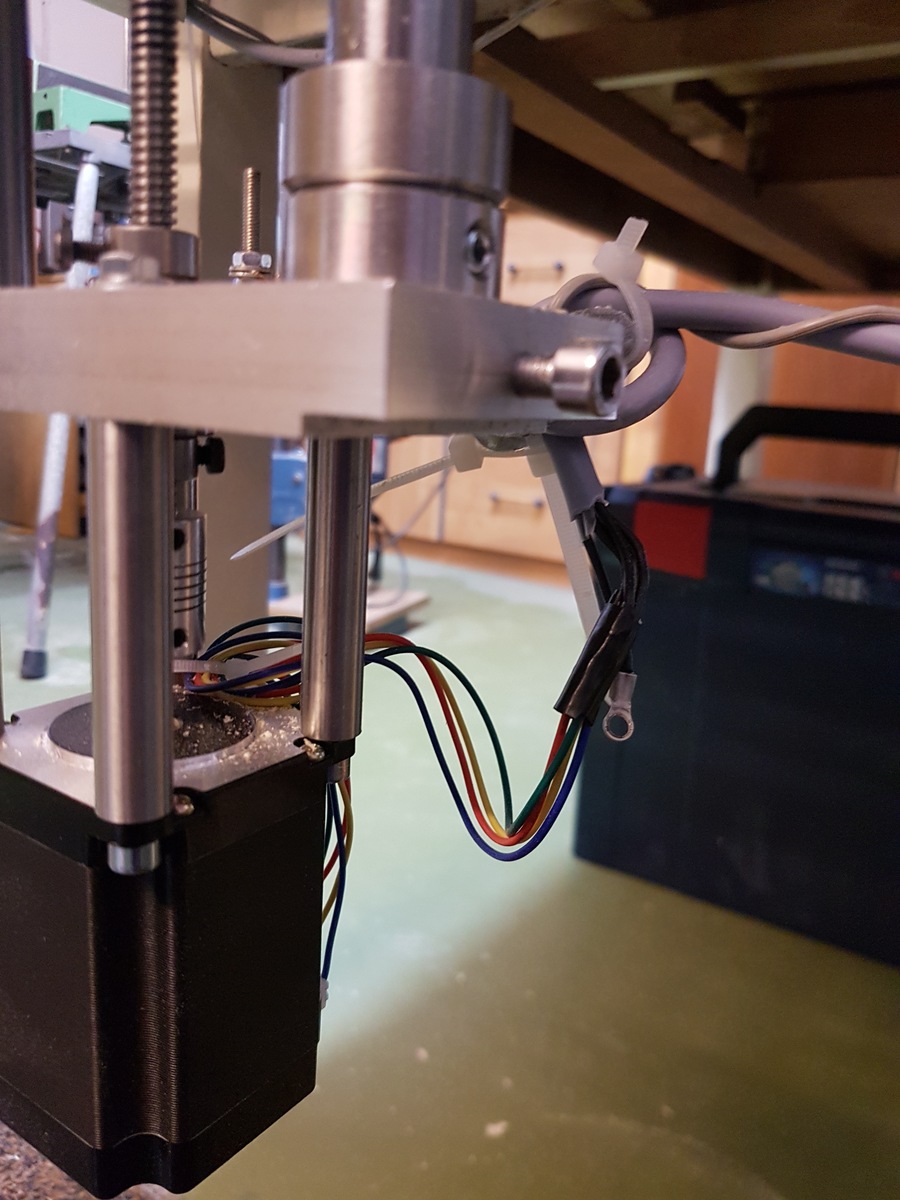
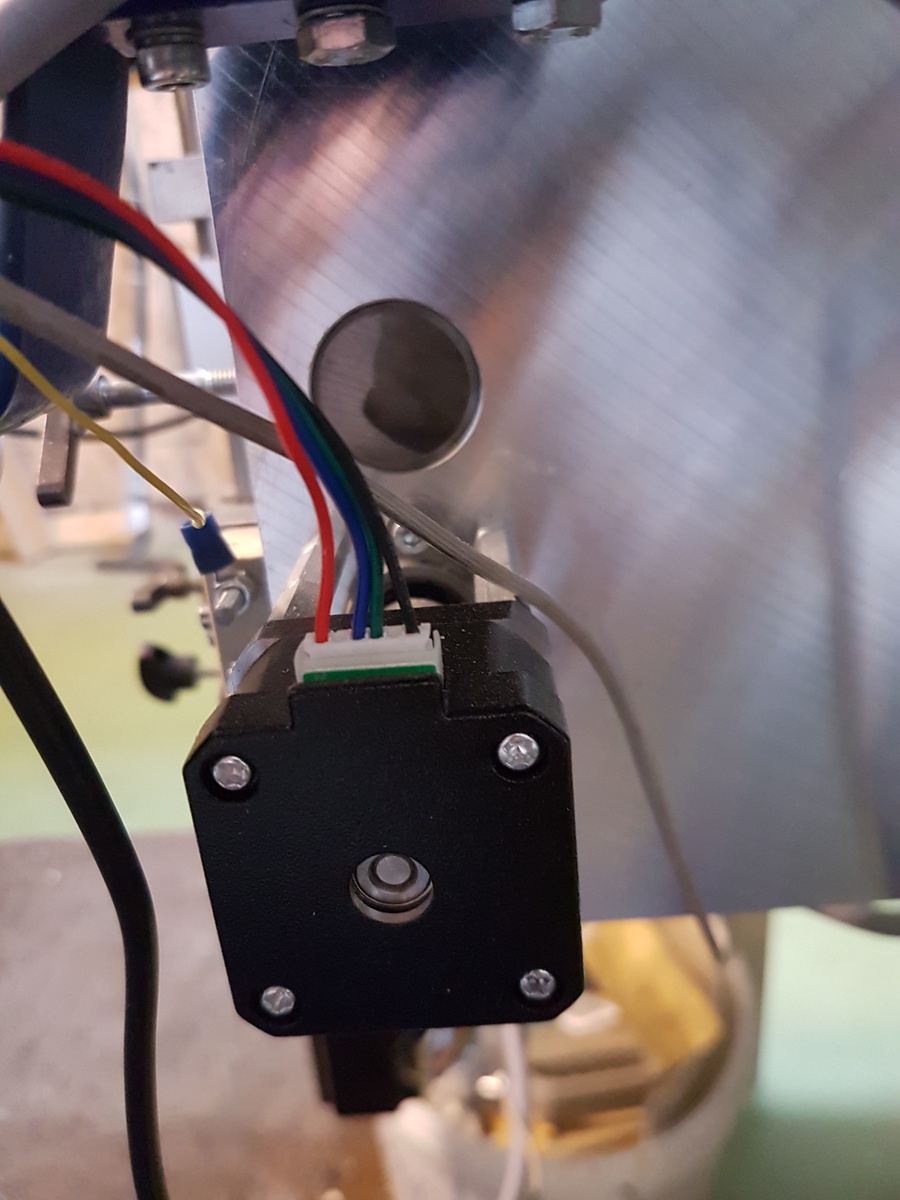
Sehr geehrtes Forum, liebe Mitleser, da ich neu im Forum bin bitte ich um nicht nur technische Ratschläge. bei meinem Projekt handelt es sich um einen Aufbau zum Fräsen. Es gibt insgesamt 3 Achsen, von denen 2 über einen einen Nema17 und eine (Z-Achse) über einen Nema23 von Trapezgewindespindeln angetrieben werden. Wenn der Aufbau funktioniert, läuft alles so wie es das soll. Beim Defekt eines Treibers ist ein deutlicher Widerstand an der Motorwelle festzustellen. Nun zu meinem Problem: nach mehrfacher Benutzung gehen die Treiber (A4988) kaputt. Ein paar Fakten zum Aufbau: -Als Steuerung dient ein Arduino Mega -Stromquelle: altes Laptopnetzteil (19V, 3,4A), 19V-Seite ist abgesichert durch eine 2,5A mittelträge Sicherung. Als Kondensator ist ein 220µF angeschlossen. Diese Seite dient als Versorgungsspannung der Treiber. -Der Arduino wird auf der 19V Seite (gleiches Massepotential) von einem L7809 versorgt (100nF ist, wie im Datenblatt angegeben, angelötet) -Es ist immer nur eine Achse in Betrieb (danach wird der jeweilige Treiber über den SLEEP-Pin auf "0"gesetzt, sodass auch kein Ruhestrom fließen sollte. -Der Strom der Treiber wurde auf ein Minimum reduziert, sodass sich alle Achsen ohne Schrittverluste auf einen Wert positionieren lassen. (Nema17 0,6V; Nema23 0,8V). -Im Betrieb des Nema23 ist ein Spannungsabfall von nur 0,3V auf 19,2V messbar (Multimeter) -Die maximale Betriebszeit einer Achse beträgt ca. 20sec, eine Wärmeentwicklung ist nicht spürbar (Finger auf IC Gehäuse). -Die Signalseite der Treiber sitzt direkt auf dem Arduino. -Im Sketch gibt es kein Soft-Start oder Soft-End, kann dies möglicherweise nachteilig sein (Selbstinduktion-->Spannungserhöhung-->defekt?)? -gefühlt hat eine Erhöhung der Drehfrequenz (Verringerung der Step- Intervalle) zu mehr kaputten Treibern geführt. Ich hoffe alle wichtigen Informationen aufgelistet zu haben. Über Verbesserungsvorschläge würde ich mich sehr freuen, leider ist mein rudimentäres Grundwissen am Ende. Vielen Dank fürs Lesen und mögliche Antworten Viele Grüße Nico
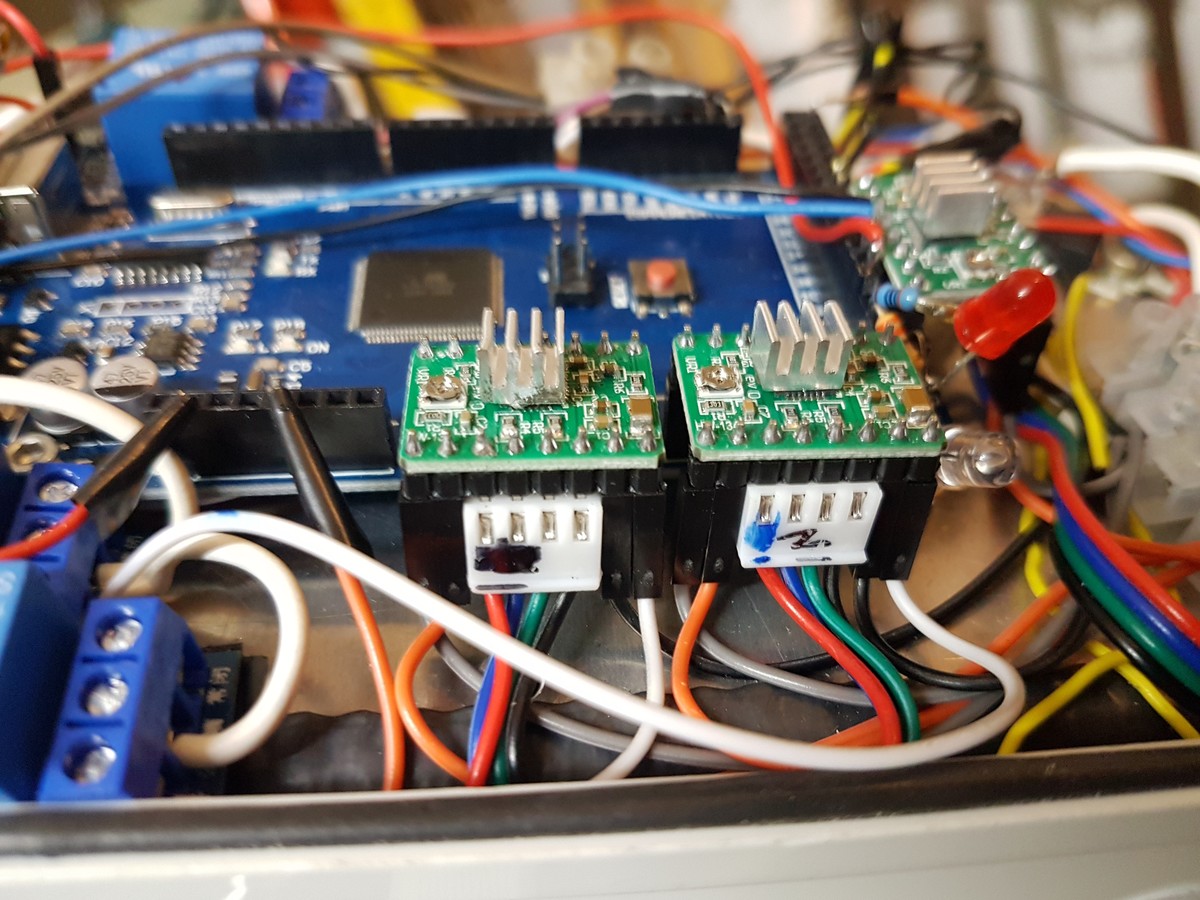
Sind alle Kabel richtig fest dran ? Solche Treiber sterben idR wenn unter Strom der Motor abgetrennt (durch Wackler oder Ausstecken) wird. Die andere Schiene sind Schwankungen in der Versorgung. Aber der 220er Kondi klingt erstmal nicht danach, aber bei entsprechend langen und wackligen Kabeln geht das auch da. Mach vlt. mal ein paar Bilder ?
Angehängte Dateien:
-

20200409_013703.jpg
240 KB -

20200409_013807.jpg
230 KB -

20200409_013733.jpg
210 KB -

20200409_013717.jpg
230 KB
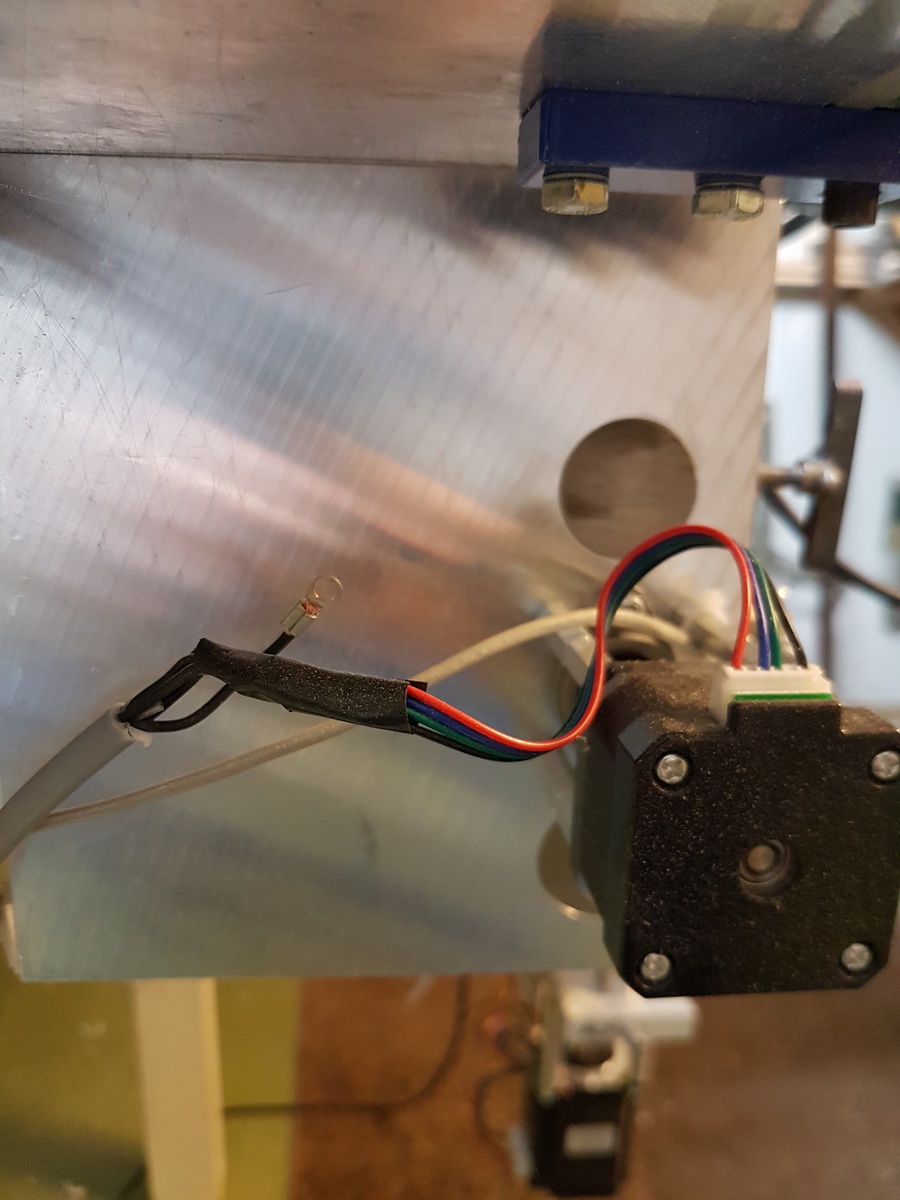
Hallo Max, vielen Dank für deine schnelle Antwort. Ich habe die mitgelieferten Kabel verlängert. Die Zwischenstücke sind verlötet. Die Lötstellen sollten eigentlich nicht fehlerhaft sein. Wie kann ich den Kontakt hier noch verbessern? Soll am besten alles gelötet werden? Komplett auf die Stecker verzichten? Mittlerweile will ich keine Risiken mehr eingehen. Viele Grüße Nico
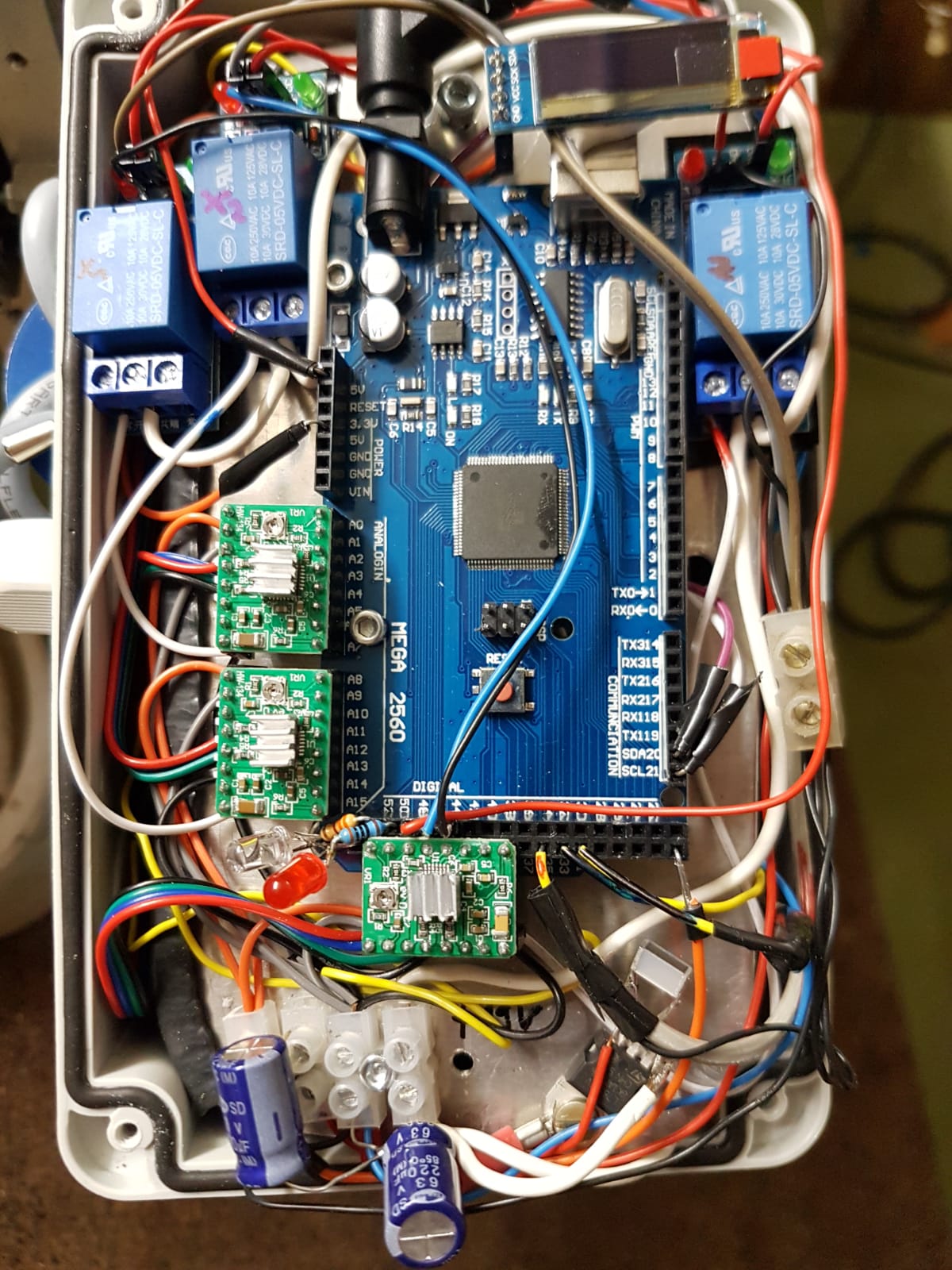
Hi, < Als Kondensator ist ein 220µF angeschlossen. in deinen Bildern sehe ich ihn nicht. Also entweder weit weg oder gut versteckt. Andere Hersteller von Treibermodulen verlangen ganz in der Nähe eine jeden Treibers 4700µF (bei ähnlichen Leistungen). Dieser Kondensator hat die Aufgabe die rückgeführte Energie Spannungsspitzen... aufzunehmen damit die Ub nicht überschritten wird. Ja, du verwendest nur 19V bis 35 ist da noch einiges an Luft aber ich sehe deine 220µ nicht in der Nähe deiner Treiber und jedes Stückchen Draht ist eine Induktivität. Ich würde als 1. an jedes Modul die angegebenen 100µ oder mehr, direkt drankleben. Du solltest auch darauf achten Power-GND und Steuer-GND absolut getrennt zu halten. Viel Erfolg, Uwe
Uwe schrieb: > Hi, > < Als Kondensator ist ein 220µF angeschlossen. > in deinen Bildern sehe ich ihn nicht Ich sehe ihn auch nicht.
Hallo Uwe, vielen Dank für deine Antwort. Der Kondensator befindet sich rechts in der Klemme (nur im Ansatz erkennbar), von hier gehen alle 19V Versorgungsspannungen ab. Größere Kondensatoren könnte ich auch einbauen, Hauptsache es hilft. Meinst du, dass eine Erhöhung der Versorgungsspannung eventuell Spannungseinbrüchen bei höheren Drehzahlen entgegen wirkt? Oder verstehe ich dich hier falsch? Wieso müssen Steuer- und Power-GND getrennt gehalten werden? Würde ein ganzes Modul, wie der TB6600 Abhilfe schaffen? In das Projekt sind schon einige 100€ geflossen, sodass ich wirklich Wert auf eine zuverlässige Steuerung lege. Viele Grüße Nico
Nico S. schrieb: > Wieso müssen Steuer- und Power-GND getrennt gehalten werden? Weil der Power-GND stark Lastabhängig ist. So etwas kann Steuerelektronik doof finden. Stell dir nur mal vor deine GND-Leitung hat 10 mOhm Bahnwiderstand und da schaltet jetzt mal eben eine 1A Last drauf. Kann Steuerelektronik schon empfindlich stören wenn plötzlich das Bezugspotential um 10 mV ansteigt ;)
Nico S. schrieb: > In das Projekt sind schon einige 100€ geflossen, sodass ich wirklich > Wert auf eine zuverlässige Steuerung lege. Sorry, aber dann solltest du deine fliegende Verkabelung zumindest auf eine Lochrasterplatine verlegen. ...und schau dir an, wie/wo z.B. bei einem RAMPS 1.4 od. 1.6 bzw. einem Arduino CNC Shield die Bufferkondensatoren sitzen. p.s. mit einem Multimeter kannst du keine Motorströme messen
Die Allegromicro ICs scheinen generell eher empfindlich. Vorschläge: - Serienwiderstände (1k?) in den Signalleitungen - ggf TVS-Dioden nach den Serienwiderständen - Pufferkondensator in der Versorgung - TVS-Diode in der Versorgung
derholzfraeser schrieb: > Soll am besten alles gelötet werden? Niemals löten, wenn es sich bewegen kann und/oder Vibrationen einwirken! Jede gelötete Litze wird irgendwann bei Bewegung/Vibration am Übergang Zinn-kein_Zinn brechen. Wahrscheinlich werden jetzt gleich wieder die "du-kannst-nicht-löten" und "ich-löte-auch-freifliegend-im-Auto" "Experten" ums Eck kommen - die kannst du getrost ignorieren.
NEMA 23 klingt nach 4A -> das wird mit den kleinen Treibern nicht funktionieren... was sagt das Datenblatt des Motors?
Hi, >Der Kondensator befindet sich rechts in der Klemme (nur im Ansatz >erkennbar), von hier gehen alle 19V Versorgungsspannungen ab. ganz schlecht, viel zu weit weg. Löte einfach 100 besser 1000µ direkt an jedes Modul(da wo die Steckerchen zu sehen sind) >Meinst du, dass eine Erhöhung der Versorgungsspannung eventuell >Spannungseinbrüchen bei höheren Drehzahlen entgegen wirkt? Nein,ich meinte das bis zur maximalen UB noch einiges an Luft ist, und ja, das ist Tatsache so aber die Grenzen für Ub werden eben enger. >Wieso müssen Steuer- und Power-GND getrennt gehalten werden? Weil Lastsprünge und Kabel schon mal zu Fehlimpulsen führen. >Würde ein ganzes Modul, wie der TB6600 Abhilfe schaffen? Das ist auf jeden Fall leistungsfähiger(sicherer) Das mit den Massen gilt aber weiterhin. Viel Erfolg, Uwe
Nico S. schrieb: > Beim > Defekt eines Treibers ist ein deutlicher Widerstand an der Motorwelle > festzustellen. Das bedeutet, daß mindestens eine Endstufe einen Kurzschluß hat, was wiederum ein Zeichen für Überspannung ist. Mag sein, daß ein dickerer Kondensator die Lösung bringt. Egal, wie gut geschützt diese A49xx sein mögen, ich beschalte die Ausgänge immer mit 8 x Schutzdioden gegen V++ und GND. Vielleicht hilft Dir dies weiter, die paar Dioden kosten wenig und können viel bringen.
ich³ schrieb: > derholzfraeser schrieb: >> Soll am besten alles gelötet werden? > > Niemals löten, wenn es sich bewegen kann und/oder Vibrationen > einwirken! Jede gelötete Litze wird irgendwann bei Bewegung/Vibration > am Übergang Zinn-kein_Zinn brechen. > > Wahrscheinlich werden jetzt gleich wieder die "du-kannst-nicht-löten" > und "ich-löte-auch-freifliegend-im-Auto" "Experten" ums Eck kommen - die > kannst du getrost ignorieren. Sry, aber was für ein Stuss. Es kommt schlichtweg auf die Stärke der Vibrationen an und gegen Bewegung helfen Zugentlastungen. Und um es gleich deutlich zu machen: Ich bestreite nicht, dass gecrimpte Verbindungen mechanisch stabiler sind.
Angehängte Dateien:
-

Draufsicht.jpg
290 KB
Zunächst einmal vielen Dank für die umfangreichen Antworten. Das freut mich sehr. M. K. schrieb: > Nico S. schrieb: >> Wieso müssen Steuer- und Power-GND getrennt gehalten werden? > > Weil der Power-GND stark Lastabhängig ist. So etwas kann > Steuerelektronik doof finden. Stell dir nur mal vor deine GND-Leitung > hat 10 mOhm Bahnwiderstand und da schaltet jetzt mal eben eine 1A Last > drauf. Kann Steuerelektronik schon empfindlich stören wenn plötzlich das > Bezugspotential um 10 mV ansteigt ;) Wie müsste ich das verbessern? Die Masse vom Arduino abgreifen? Wobei diese ja das gleiche Potential haben sollten, da sie über den L7809 miteinander verbunden sind. Also liegt hier genau das Problem, wenn ich dich richtig verstehe? Sollen die Versorgungsspannung (19V) nach der Benutzung des Treibers abnehmen? War mal meine Überlegung, deshalb die Relais vor der Versorgungsspannung. Kennt jemand eventuell ein (CNC-) Shield, bei dem ich noch die Möglichkeit hätte, das Keypad (8-Pins), Display ((I²C), SCL,SDA) und ca 8 weitere Pins "normal" nutzen könnte? Möglicherweise ist dieser Schritt einfacher, als den Kabelsalat weiter auszuweiten. Welche Schutzdiode könnt ihr mir empfehlen? Vielen Dank und Grüße Nico
Dioden gibt es wie Sand am Meer. Beispiel wäre 1N5818/19 oder SDxxx oder MBRxxx. Selber nehme ich meist SS14L. Als Beispiel: Beitrag "Schrittmotoransteuerung mit A4982 und ATmega328"
Du kannst auch Signal- und Leistungsmasse so früh wie möglich trennen, dann gibt es auch weniger Probleme. Dazu die Massekabel der Treiber direkt in jeweils einem separaten Kabel zu Versorgung und Ansteuerung führen. Ohne Überspannungsschutz wäre ich mir aber nicht sicher ob es da nicht füher oder später wieder etwas grillt.
Stefan A. schrieb: > Sry, aber was für ein Stuss. Es kommt schlichtweg auf die Stärke der > Vibrationen an und gegen Bewegung helfen Zugentlastungen. Nö, kein Stuss, über vier Jahrzehnte Erfahrung. Da hilft auch das Weglassen von Buchstaben nichts. Ich empfehle hier aber ganz klar sinnentnehmendes Lesen, denn "wenn es sich bewegen kann und/oder Vibrationen einwirken" mit "gegen Bewegung helfen Zugentlastungen" zu kontern ist komplett am Thema vorbei. Wobei die Diskussion bei dem Gesamtaufbau ohnehin müßig ist.
Nico S. schrieb: > Wie müsste ich das verbessern? Die Kondensatoren gehören ganz an die Treiber, nicht irgendwo in die andere Ecke vom Drahtverhau. Die Energie, die in den Kondensatoren zwischengespeichert werden soll, kommt über den jeweiligen Treiber aus der Motorwicklung.
Halo Stefan, Stefan A. schrieb: > Die Allegromicro ICs scheinen generell eher empfindlich. > Vorschläge: > - Serienwiderstände (1k?) in den Signalleitungen > - ggf TVS-Dioden nach den Serienwiderständen > - Pufferkondensator in der Versorgung > - TVS-Diode in der Versorgung Nein, die Allegro-Treiber sind nicht empfindlicher als andere Schrittmotortreiber. Das Problem ist, dass es zu viele schlechte "Designs" gibt und diese aufgrund ihres spartanischen Aufbaus auch entsprechend billig verkauft werden. Zu dem billigen Aufbau gehört z.B., dass die zwingend erforderlichen Elkos weggelassen werden und das nicht genügend Kupferfläche zum Kühlen vorhanden ist. Statt dessen kleben besondere Spezialisten dann Kühlkörper von oben auf das Plastikgehäuse, wo der Wärmeübergang am schlechtesten ist. Die niedrigen Preise machen diese Shields trotz allem bei Bastlern beliebt, führt aber zu dem Eindruck, die Treiber wären besonders empfindlich. L298 oder L6203 sind übrigens auch gerne lautstark explodiert, wenn die Schaltung schlecht war oder die Versorgungsspannung aufgrund von Rückspeisung zu stark angestiegen ist. Trotzdem war die Kombination L297/L298 lange Zeit der Standard bei Schrittmotorsteuerungen. Ich setze die Treiber von Allegro seit über 10 Jahren in Serienprodukten ein (u.a. A3977, A3979, A5979, A3959) ganz ohne Probleme. Wenn man vom A3986 mal absieht, der einen Designfehler in der Mikroschritt-Statemachine hatte. Werder die Beschaltung der Steuerleitungen ist das Problem, noch fehlende externe Dioden an den Ausgängen, sondern schlicht die fehlenden Elkos und die in diesem Beispiel Verdrahtung jenseits aller guten Gepflogenheiten. Wobei 4.700µ an jeder Achse wie oben geschrieben deutlich übertrieben sind. 100-200µ direkt am Treiber sollten in den meisten Fällen ausreichen. Mit freundlichen Grüßen Thorsten Ostermann
Hallo Thorsten, Ich habe den A4989 (braucht externe MOSFETs) auf einem eigenen Design (4-Layer vom Leiterplattenhersteller) in Kleinstserie. Das Bestücken erfolgt per Hand, löten passiert im Ofen (kein Chinaheimer). Wenn bei der Funktionsprüfung etwas nicht funktioniert war es bisher nahezu ausnahmslos eines dieser ICs. Im Feld haben wir damit auch keine Probleme. Ich will auch nicht bestreiten, dass es diese Schwierigkeiten bei automatisierter Fertigung so nicht gibt, aber alle andere Bauteile sind unter gleichen Bedingungen eben unauffällig. Das bedeutet eben nicht, dass der Treiber schlecht ist (sonst hätte ich einen Anderen verwendet) sondern einfach empfindlich. Ob natürlich mit so einer fliegenden Verkabelung nicht auch robustere Bauteile das Zeitliche segnen würden steht auf einem anderen Blatt... Grüße
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.