Hallo,
für mein Homeoffice habe ich mir einen höhenverstellbaren Tisch gegönnt
und versuche nun das Protokoll zwischen Bedienteil und Antrieb zu
entschlüsseln.
Inspiriert wurde ich von diesem Video (gleicher Tisch btw), wobei mir
die Vorgehensweise zu plump ist:
https://www.youtube.com/watch?v=vKwUHvPv-U8
Ich habe keinen Sprachassistenten und ob ich das irgendwo einbinden
werde weiß ich auch noch nicht. Momentan geht es mir eher darum zu
schauen wie weit man kommt.
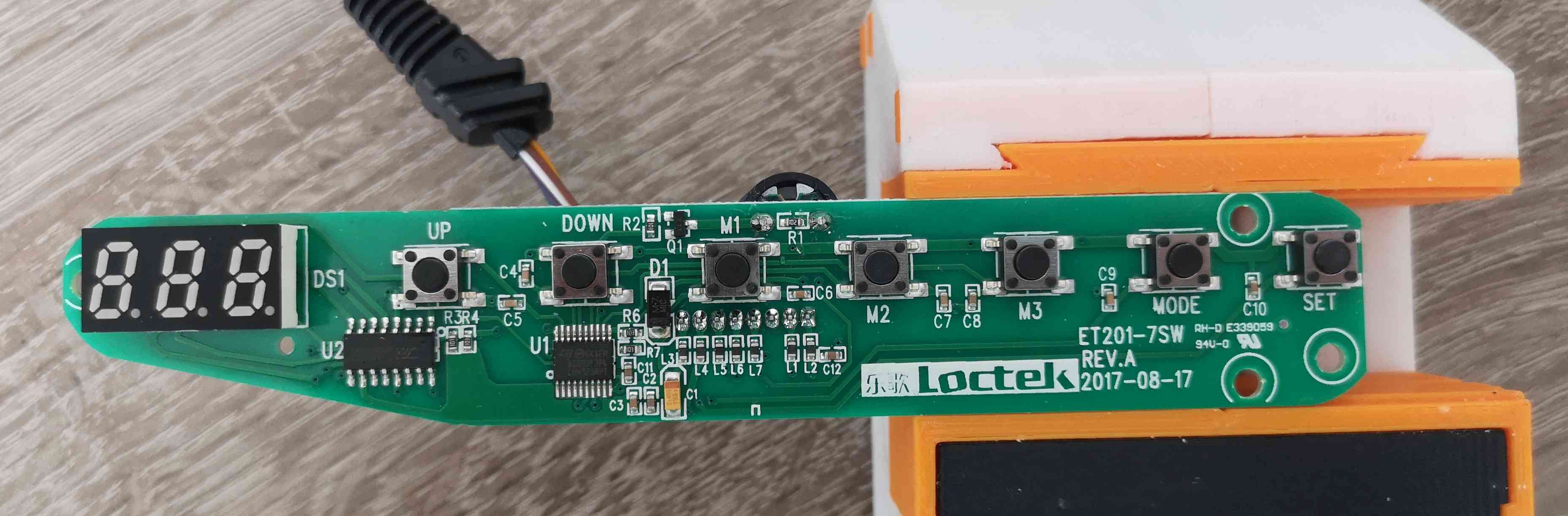
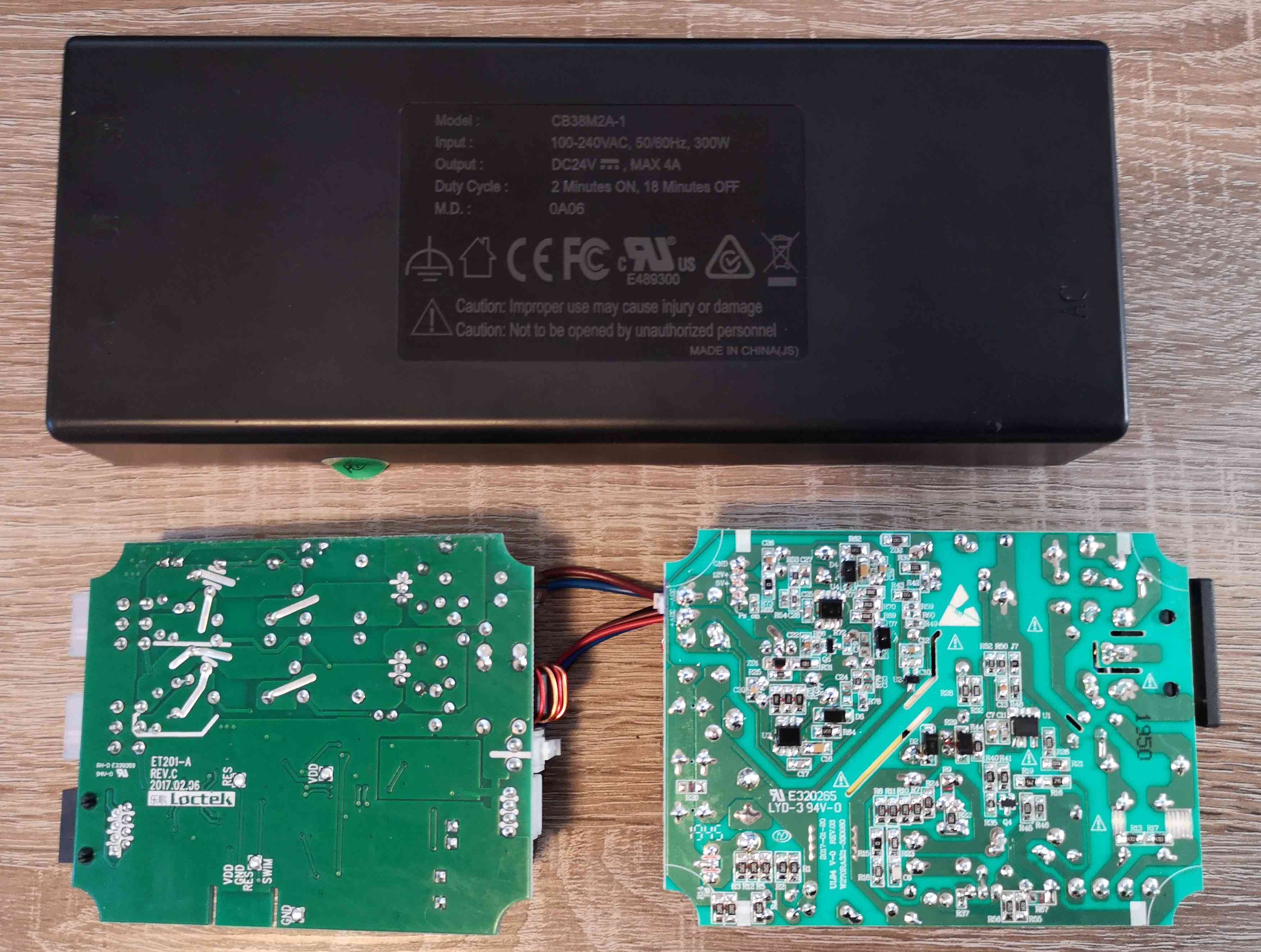
Der Tisch bzw. das Gestell ist ein Flexispot E5, die Steuerung ist von
Loctek.
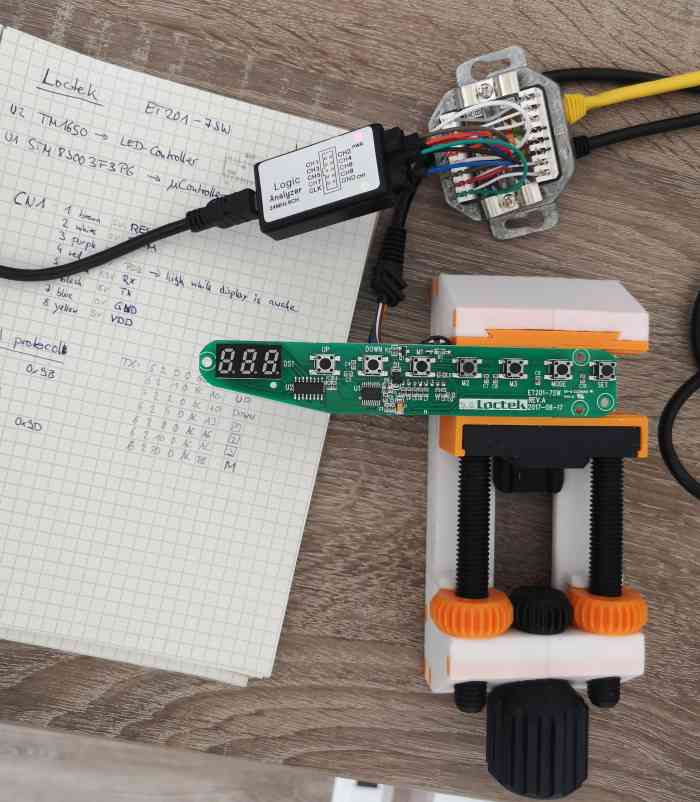
Auf der Bedienteil-Platine sitzt ein TM1650 LED-Controller und ein
STM8S003F3P6.
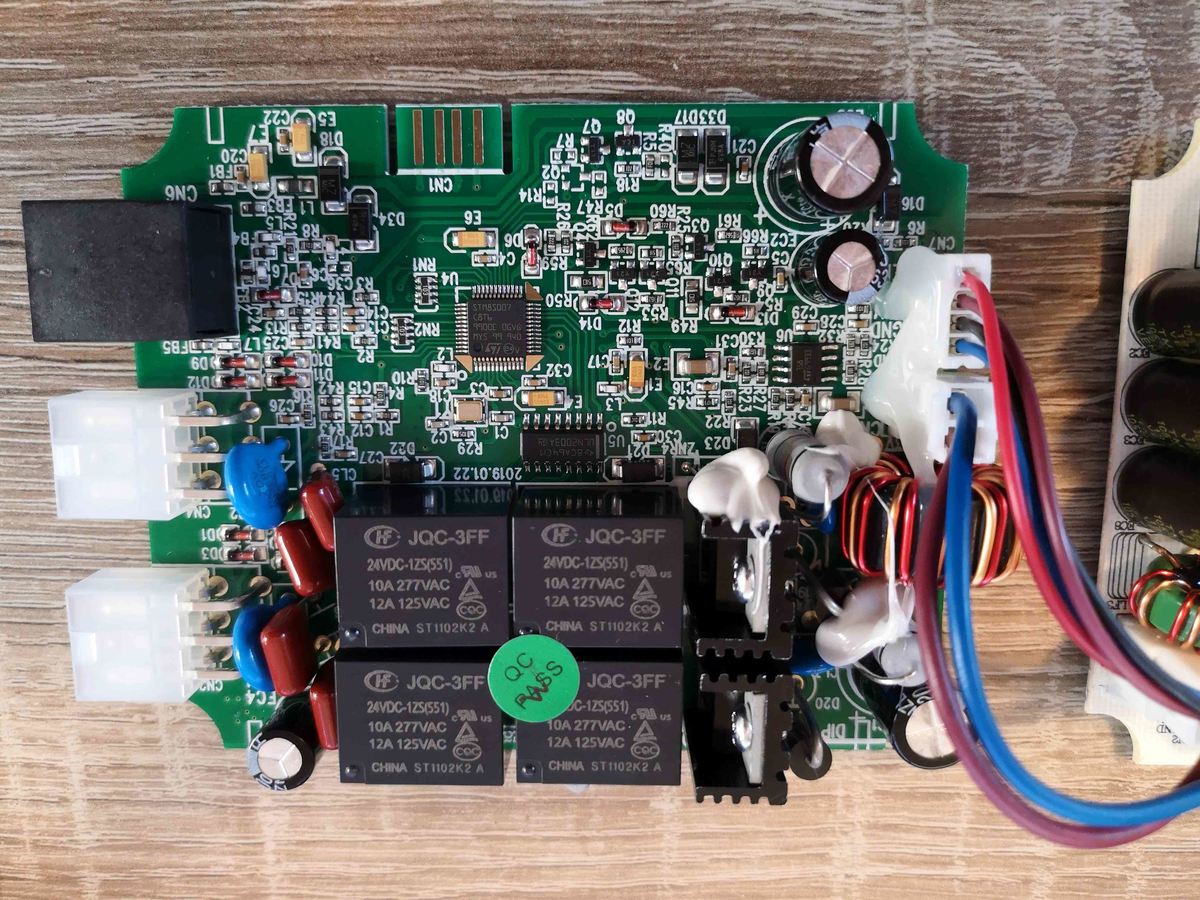
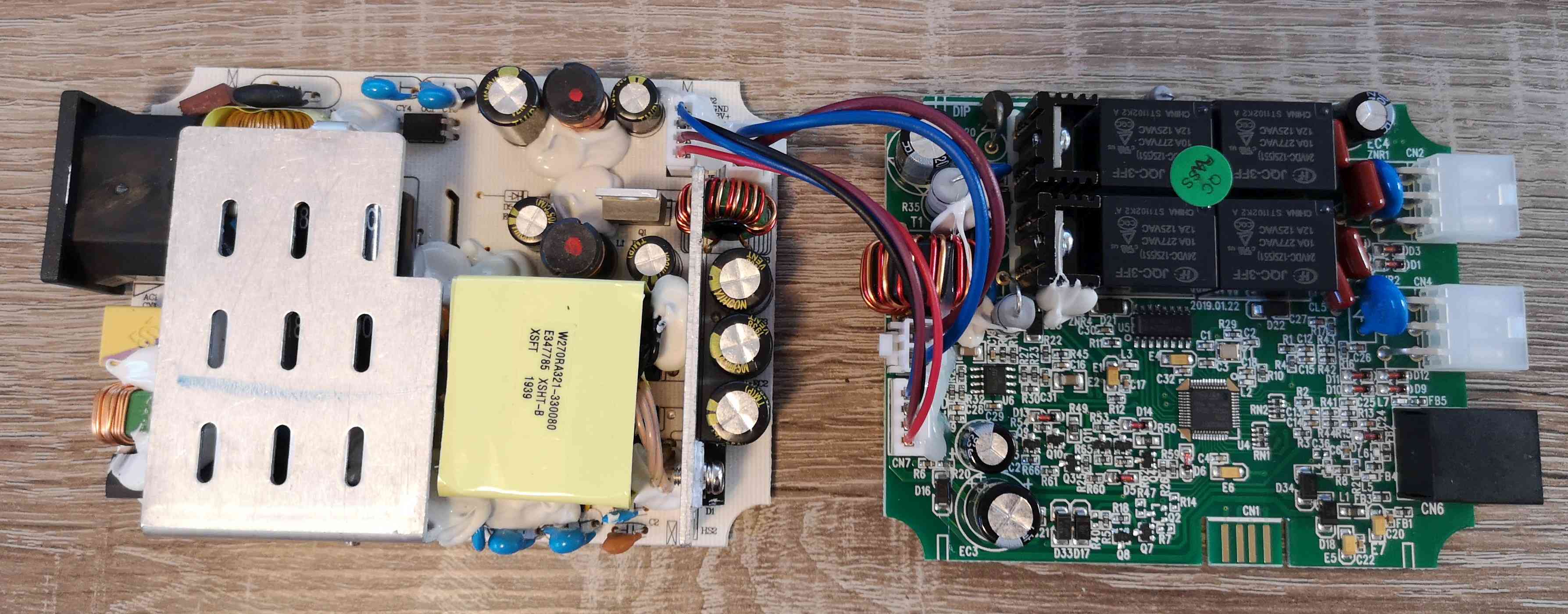
Auf der Controller-Platine ist ein STM8S007C8T6.
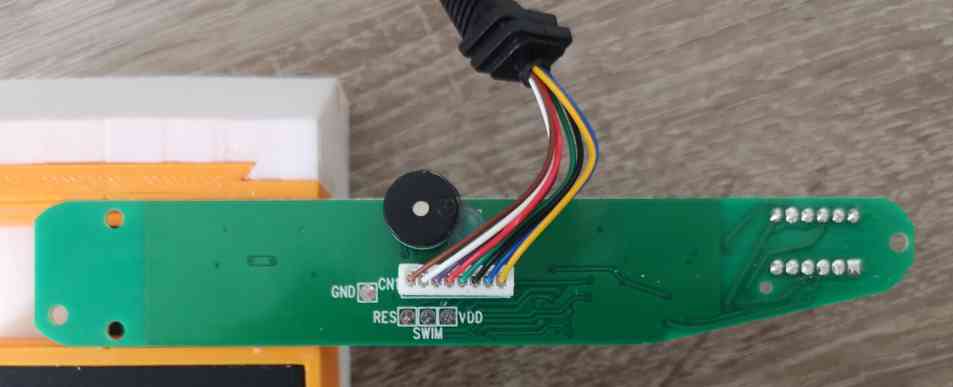
Zwischen Bedienteil und Controller ist ein 8-adriges Kabel mit
RJ45-Stecker und folgender Pinbelegung:
1 | 1 brown Reset vom µC
|
2 | 2 white SWIN vom µC
|
3 | 3 purple nicht benutzt
|
4 | 4 red wird vom Bedienteil auf high gezogen solange das Display an ist
|
5 | 5 green RX (aus Sicht des Bedienteils)
|
6 | 6 black TX (aus Sicht des Bedienteils)
|
7 | 7 blue GND
|
8 | 8 yellow VDD (5 Volt)
|
Warum Reset und SWIN über das Kabel geführt werden? Vielleicht wird
darüber die FW aufgespielt.
Der UART läuft mit 9600 Baud, 8N1.
Nach jedem Tastendruck bleibt das Display rund 3 Sekunden an und zeigt
die aktuelle Höhe an. Während dieser Zeit ist Leitung 4 high und es
findet RX/TX-Kommunikation statt.
Das Protokoll sieht in beiden Richtungen folgendermaßen aus:
1 | Startbyte = 0x9B
|
2 | Länge (ohne Start/Endbytes)
|
3 | Payload
|
4 | ...
|
5 | Endbyte = 0x9D
|
Folgende Kommunikation habe ich aufgezeichnet, vom Bedienteil zum
Controller:
Start- und Endbytes sind nicht dargetellt, die erste Spalte ich die
Länge, alles in Hex.
1 | LEN 1 2 3 4 5 Taste
|
2 | ----------------------------------------
|
3 | 06 02 00 00 6C A1 keine Taste gedrückt
|
4 | 06 02 01 00 FC A0 UP
|
5 | 06 02 02 00 0C A0 DOWN
|
6 | 06 02 04 00 AC A3 [1]
|
7 | 06 02 08 00 AC A6 [2]
|
8 | 06 02 10 00 AC AC [3]
|
9 | 06 02 20 00 AC B8 [M]
|
Spalte 1: vielleicht das Kommando, 2 = Tastenstatus.
Spalte 2: gedrückte Taste(n), pro Taste ein Bit.
Spalte 3: immer Null
Spalte 4 und 5: vielleicht eine Art Checksumme? Die Werte sind immer so,
ändern sich nicht über Zeit oder mit der Höhe des Tisches.
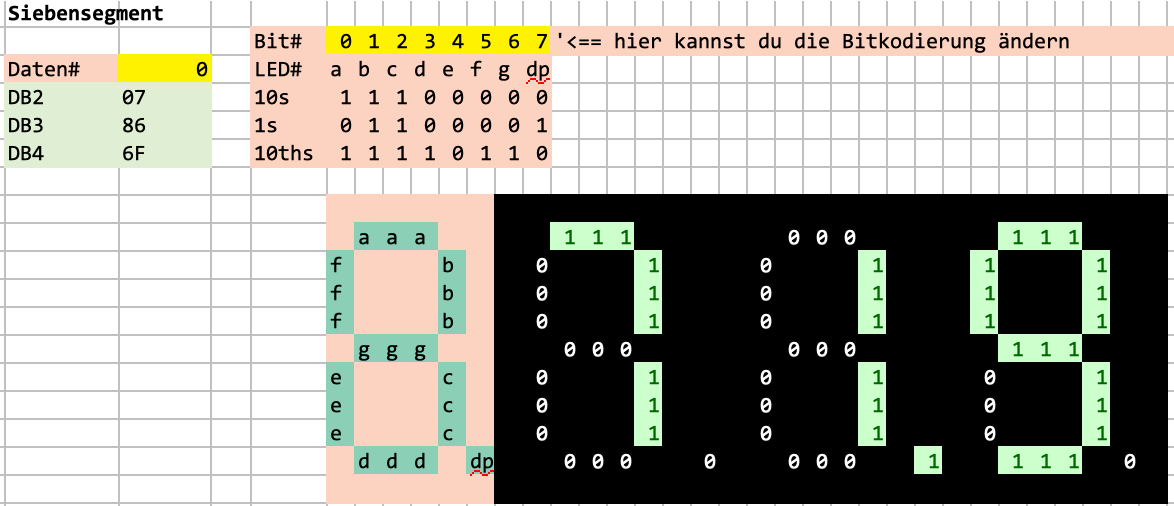
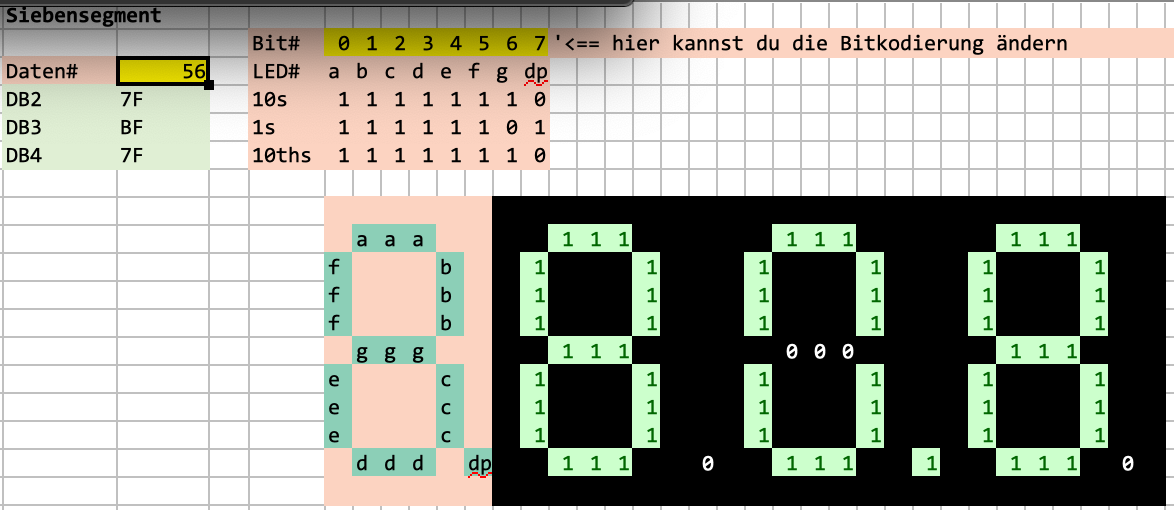
Vom Controller zum Bedienteil:
Eine Fahrt um 2 mm, von 72,0 bis 72,2 cm:
1 | LEN 1 2 3 4 5 6 Höhe [cm]
|
2 | ---------------------------------
|
3 | 07 12 07 DB 3F 99 3F 72,0
|
4 | 07 12 07 DB 06 8B FF 72,1
|
5 | 07 12 07 DB 5B 72 3E 72,2
|
Eine Fahrt von etwa 72 cm nach 80 cm Höhe:
1 | LEN 1 2 3 4 5 6
|
2 | ---------------------------------
|
3 | 07 12 07 86 6F 35 07
|
4 | 07 12 07 DB 3F 99 3F
|
5 | 07 12 07 DB 06 8B FF
|
6 | 07 12 07 DB 5B 72 3E
|
7 | 07 12 07 DB 4F 7D 3E
|
8 | 07 12 07 DB 66 A3 FF
|
9 | 07 12 07 DB 6D 64 BE
|
10 | 07 12 07 DB 7D A8 BF
|
11 | 07 12 07 DB 07 4B 3E
|
12 | 07 12 07 DB 7F 69 3E
|
13 | 07 12 07 DB 6F A5 3F
|
14 | 07 12 07 CF 3F 99 30
|
15 | 07 12 07 CF 06 8B F0
|
16 | 07 12 07 CF 4F 7D 31
|
17 | 07 12 07 CF 66 A3 F0
|
18 | 07 12 07 CF 6D 64 B1
|
19 | 07 12 07 CF 07 4B 31
|
20 | 07 12 07 CF 7F 69 31
|
21 | 07 12 07 CF 6F A5 30
|
22 | 07 12 07 E6 06 1B EF
|
23 | 07 12 07 E6 5B E2 2E
|
24 | 07 12 07 E6 66 33 EF
|
25 | 07 12 07 E6 7D 38 AF
|
26 | 07 12 07 E6 07 DB 2E
|
27 | 07 12 07 E6 6F 35 2F
|
28 | 07 12 07 ED 3F 39 28
|
29 | 07 12 07 ED 5B D2 29
|
30 | 07 12 07 ED 66 03 E8
|
31 | 07 12 07 ED 7D 08 A8
|
32 | 07 12 07 ED 7F C9 29
|
33 | 07 12 07 FD 3F F9 25
|
34 | 07 12 07 FD 5B 12 24
|
35 | 07 12 07 FD 66 C3 E5
|
36 | 07 12 07 FD 6D 04 A4
|
37 | 07 12 07 FD 07 2B 24
|
38 | 07 12 07 FD 6F C5 25
|
39 | 07 12 07 87 06 8B C6
|
40 | 07 12 07 87 4F 7D 07
|
41 | 07 12 07 87 6D 64 87
|
42 | 07 12 07 87 07 4B 07
|
43 | 07 12 07 87 6F A5 06
|
44 | 07 12 07 FF 06 8B E4
|
45 | 07 12 07 FF 4F 7D 25
|
46 | 07 12 07 FF 6D 64 A5
|
47 | 07 12 07 FF 07 4B 25
|
48 | 07 12 07 FF 6F A5 24
|
49 | 07 12 07 EF 06 4B E9
|
50 | 07 12 07 EF 4F BD 28
|
51 | 07 12 07 EF 6D A4 A8
|
52 | 07 12 07 EF 07 8B 28
|
53 | 07 12 7F BF 3F 40 95
|
54 | 07 12 7F BF 5B AB 94
|
55 | 07 12 7F BF 66 7A 55
|
56 | 07 12 7F BF 6D BD 14
|
57 | 07 12 7F BF 7D 71 15
|
58 | 07 12 7F BF 07 92 94
|
59 | 07 12 7F BF 7F B0 94
|
Selbst wenn ich Spalte 1 und 2 als eine Art Status betrachte, sind in
den restlichen Spalten zu große Sprünge um da einen ansteigenden Verlauf
zu erkennen.
Dazwischen schickt der Controller immer noch 2 weitere Telegramme, die
sich nicht mit der Höhe ändern:
1 | LEN 1 2 3 4 5 6
|
2 | ---------------------------------
|
3 | ...
|
4 | 07 12 07 DB 5B 72 3E
|
5 | 04 11 7C C3
|
6 | 04 15 BF C2
|
7 | 04 15 BF C2
|
8 | 04 11 7C C3
|
9 | 04 15 BF C2
|
10 | 07 12 07 DB 5B 72 3E
|
11 | ...
|
Vielleicht hat irgendwer eine zündende Idee, oder kennt eine gute
Vorgehensweise wie man so ein Protokoll entschlüsseln kann.
In der Zwischenzeit versuche ich mal die Höhenwerte über einen größeren
Bereich aufzuzeichnen. Vielleicht erkennt man dann mehr.