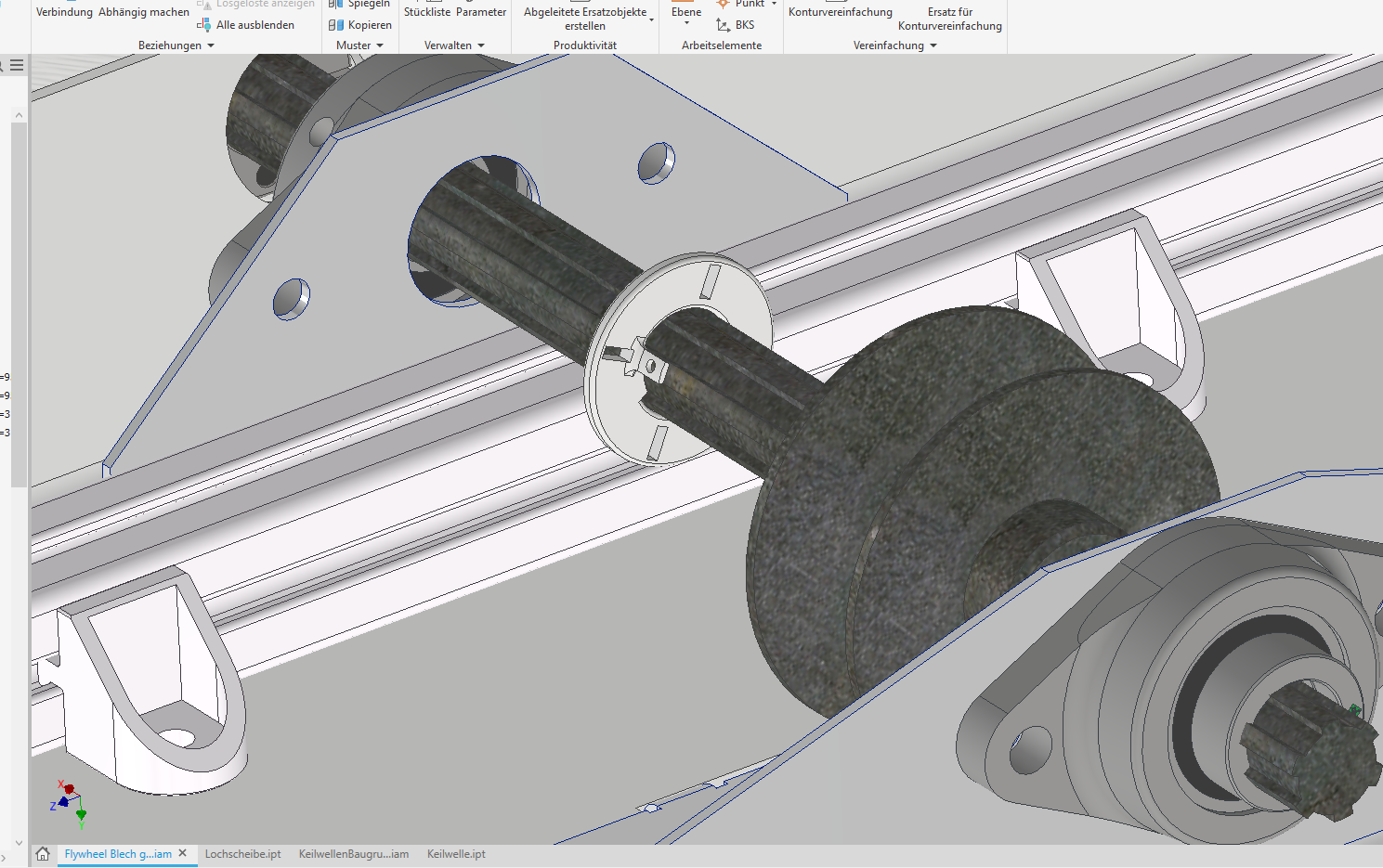
Hallo, ich stehe gerade bei meinem anderen Forenbeitrag vor der Frage, ob ich anstatt zwei einzelne Gabellichtschranken einen Doppel Hallsensor verwenden soll. Diese sind in einem Gehäuse mit Entstörungsgliedern und haben dazu noch eine Drehrichtungsausgabe. Ich denke das ist für mein Vorhaben besser geeignet und es ist später leichter auszuwerten, da es stabilere Signale ausgibt. Was denkt ihr dazu? Ich habe eine Keilwelle die durch zwei Kugellager läuft und sich dreht. Siehe Bild Ich will das Signal vorerst mit einem Arduino auswerten. Die benötigten Parameter sind Drehgeschwindigkeit und Drehrichtung. Wäre dieser Hallsensor z.B. für so etwas geeignet? https://www.infineon.com/dgdl/Infineon-TLE4966L-DataSheet-v02_10-EN.pdf?fileId=db3a304319c6f18c0119cd85b86f7ad7 Mein Hauptbeitrag ist Beitrag "Auswerten einer rotierenden Achse und Verarbeitung per App" ich hoffe das sich durch den besser passenden Themennamen mehr Leute rein schauen. Gruß Jan
Angehängte Dateien:
-

Lochscheibe.PNG
490 KB
Jan B. schrieb: > Wäre dieser Hallsensor z.B. für so etwas geeignet? TLE4966 Das ist ein Sensor für magnetische Polräder. Der braucht Nord- und Südpole, siehe Bild auf Seite 10. Wenn du so ein Polrad hast dann funktioniert der auch.
Hol dir lieber einen fertig gekapselten Geber. Gibt es aus China in einigermaßen günstig. Bei den Hall Sensoren muss man teilweise sehr genau den Abstand einhalten und sämtliche Verkippungen / Fehlausrichtungen vermeiden. Die Homogenität des Feldes ist auch ein großer Punkt, also Auswahl des richtigen Magneten. Wenn du dir das trotzdem antun möchtest schau Mal hier: https://www.ichaus.de/product/iC-MA
N. M. schrieb: > Wenn du dir das trotzdem antun möchtest schau Mal hier: > https://www.ichaus.de/product/iC-MA Das sind jetzt aber magnetische Rotations-Encoder und keine digitalen Drehzahlgeber. Klar wollen die genauer positioniert sein als ein reiner Hall-Sensor.
Okay. Ich habe mir das wie folgt vorgestellt. Ich drucke ein Rad mit dem 3D-Drucker, in dem 4-6 Magnete verbaut sind und diese werden dann mit dem Hallsensor gemessen. Was mir halt wichtig ist das es auch Störungen möglichst schon im Bauteil eliminiert und auch die Drehrichtung ausgibt. So wie in dem IC den ich oben verlinkt habe. Jetzt muss der nur noch mit meinen Gegebenheiten funktionieren :D Dieser Sensor kann auch bisschen mehr kosten als 20-30€.
Jan B. schrieb: > Ich drucke ein Rad mit dem 3D-Drucker, in dem 4-6 Magnete verbaut sind > und diese werden dann mit dem Hallsensor gemessen. > Was mir halt wichtig ist das es auch Störungen möglichst schon im > Bauteil eliminiert und auch die Drehrichtung ausgibt. Mit so was selbstgebautem wird das Magnetfeld eher ungleichmäßig werden. Beim Audi/VW - Händler bekommst du mit der Nummer 0CK 331 291C ein Magnetrad mit 45mm Innendurchmesser welches auch zu den TLE49xx-Sensor passt. Kostet ca. 10€.
Thomas F. schrieb: > Das sind jetzt aber magnetische Rotations-Encoder und keine digitalen > Drehzahlgeber. Ja, er wird bei seinem Vorhaben aber wahrscheinlich eine obere und untere Endlage brauchen vermute ich. Klar könnte er dann die Geschwindigkeit des Infineon Chip aufintegrieren. Wahrscheinlich wird das aber nicht integral genau. Sprich, die Position der Endlage wird weglaufen vermute ich. Man könnte dann natürlich noch Endschalter anbringen. Ich würde halt einfach eine Absolutposition nehmen. Oder zumindest relativ zu einem Teaching. Dann hätte man die Endpunkte, die aktuelle Position und durch Differenzierung die Geschwindigkeit. Thomas F. schrieb: > Klar wollen die genauer positioniert sein als ein reiner Hall-Sensor. Ja hatte in diesem Beitrag übersehen dass er nach Geschwindigkeitssensoren sucht.
N. M. schrieb: > Thomas F. schrieb: >> Das sind jetzt aber magnetische Rotations-Encoder und keine digitalen >> Drehzahlgeber. > > Ja, er wird bei seinem Vorhaben aber wahrscheinlich eine obere und > untere Endlage brauchen vermute ich. Klar könnte er dann die > Geschwindigkeit des Infineon Chip aufintegrieren. > Wahrscheinlich wird das aber nicht integral genau. Sprich, die Position > der Endlage wird weglaufen vermute ich. > Man könnte dann natürlich noch Endschalter anbringen. > Ich würde halt einfach eine Absolutposition nehmen. Oder zumindest > relativ zu einem Teaching. Dann hätte man die Endpunkte, die aktuelle > Position und durch Differenzierung die Geschwindigkeit. > > Thomas F. schrieb: >> Klar wollen die genauer positioniert sein als ein reiner Hall-Sensor. > > Ja hatte in diesem Beitrag übersehen dass er nach > Geschwindigkeitssensoren sucht. Für mein Vorhaben benötige ich nur die Drehrichtung und die Geschwindigkeit. Ich beschleunige diese Achse mit Muskelkraft (Trainingsgerät) und möchte wissen wie schnell sich diese Achse dreht. Falls ihr genau wissen wollt was ich mache : https://docs.google.com/document/d/1y1Ps2lGMBlGfHp_X861jGAQr7EngHwYD4h-WHcQWqrM/edit?usp=sharing Ich hab auch schon die Magneträder von KFZ angeschaut aber die sind leider zu schwer und zu sperrig.
Jan B. schrieb: > Ich hab auch schon die Magneträder von KFZ angeschaut aber die sind > leider zu schwer und zu sperrig. Dann mach doch mal ein paar Angaben wie es aussehen soll.
Angehängte Dateien:
-

geraet.PNG
250 KB
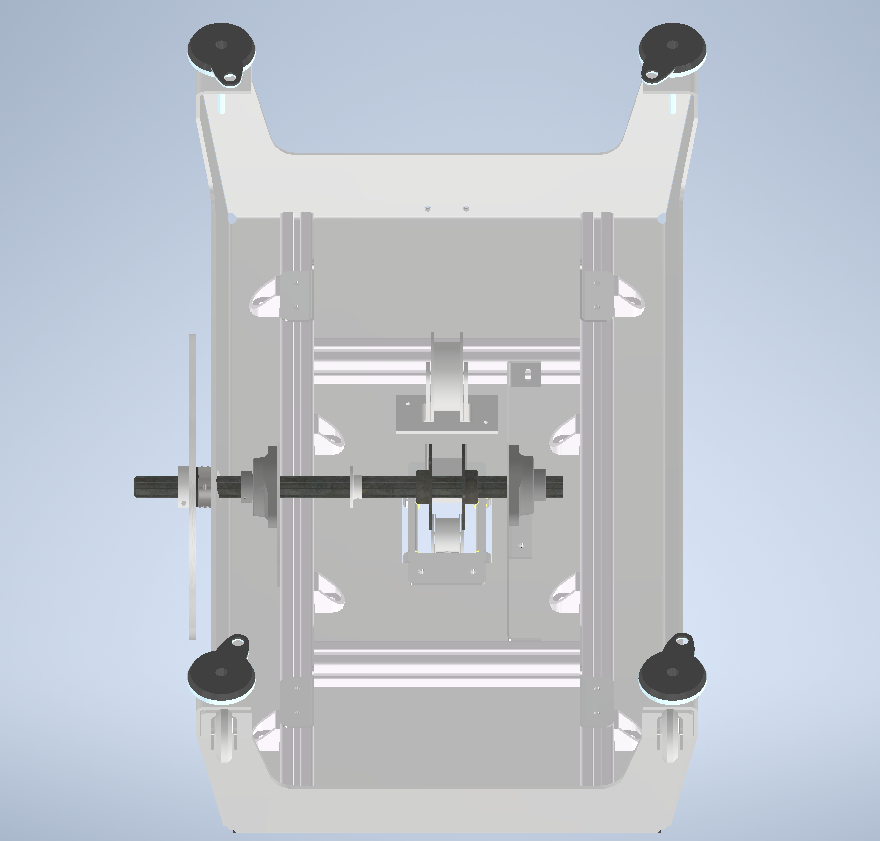
Thomas F. schrieb: > Jan B. schrieb: >> Ich hab auch schon die Magneträder von KFZ angeschaut aber die sind >> leider zu schwer und zu sperrig. > > Dann mach doch mal ein paar Angaben wie es aussehen soll. Im Anhang ist das Gerät. Dies besitzt eine Keilwelle die mit Kugellager befestigt ist. Die Welle sollte aber möglichst nicht mehr viel schwerer werden, da dann das Trainingsprinzip verfälscht wird. Massenträgheit der Achse ist dann höher.
Jan B. schrieb: >> Dann mach doch mal ein paar Angaben wie es aussehen soll. > > Im Anhang ist das Gerät. Ich dachte an einfache Angaben wie Innen- und Außendurchmesser des Sensorrades. Auf dem Bild kann man keine Größenordnungen erkennen. > Ich hab auch schon die Magneträder von KFZ angeschaut aber die sind > leider zu schwer und zu sperrig. Zu schwer? Was hast du denn da angesehen?
zwei Halleffekt schalter (wie sie zB im BLDC deines optischen laufwerks stecken) die platzierst Du 60° auseinander und nach spätestens einer Umdrehung kennst Du die Richtung. (zeitspanne zwischen A und B kürzer oder länger als zwischen B und A) Geschwindigkeit ist halt die Zeit zwischen zwei A's oder zwei B's Typnummer hab ich keine im Kopf, ist auch unwichtig solange es kein ratiometrischer halleffect sensor ist sondern ein stumpfer schalter (eingebauter opamp) mit ausreichender Erkennung für Deinen Magneten ist das egal. 'sid PS das geht übrigens auch mit einem ratiometrischen Sensor und zwei magneten die 60° voneinander auf der Achse kleben müssen nur unterschiedlich orientiert sein... nord vor süd rechtsrum, süd vor nord linksrum ....
Thomas F. schrieb: > Jan B. schrieb: >>> Dann mach doch mal ein paar Angaben wie es aussehen soll. >> >> Im Anhang ist das Gerät. > > Ich dachte an einfache Angaben wie Innen- und Außendurchmesser des > Sensorrades. > Auf dem Bild kann man keine Größenordnungen erkennen. > >> Ich hab auch schon die Magneträder von KFZ angeschaut aber die sind >> leider zu schwer und zu sperrig. > > Zu schwer? Was hast du denn da angesehen? Also das Rad mit max 80mm Außendurchmesser und nicht schwerer als 2-3 KG wären gut. Innenmaß 25mm wäre perfekt, da die Welle 25mm Durchmesser hat.
sid schrieb: > zwei Halleffekt schalter (wie sie zB im BLDC deines optischen laufwerks > stecken) > die platzierst Du 60° auseinander und nach spätestens einer Umdrehung > kennst Du die Richtung. > (zeitspanne zwischen A und B kürzer oder länger als zwischen B und A) > Geschwindigkeit ist halt die Zeit zwischen zwei A's oder zwei B's > > Typnummer hab ich keine im Kopf, ist auch unwichtig solange es kein > ratiometrischer halleffect sensor ist sondern ein stumpfer schalter > (eingebauter opamp) mit ausreichender Erkennung für Deinen Magneten ist > das egal. > > 'sid > > PS das geht übrigens auch mit einem ratiometrischen Sensor und zwei > magneten die 60° voneinander auf der Achse kleben müssen nur > unterschiedlich orientiert sein... > nord vor süd rechtsrum, süd vor nord linksrum .... Der Grundgedanke über die Funktion ist mir klar. Ich wollte halt schauen/wissen ob es das ganze in einem Bauteil fertig zu kaufen gibt. In den ICs wo man ein Polrad braucht sind halt auch noch paar Entstörglieder drin, was sicherlich auch nicht schlecht ist.
Jan B. schrieb: > Innenmaß 25mm wäre perfekt, da die Welle 25mm Durchmesser > hat. Mit 25mm kenne ich jetzt leider keines. Das von mir oben genannte ist etwas kleiner als 80mm und wiegt geschätzt 50g.
Thomas F. schrieb: > Jan B. schrieb: >> Innenmaß 25mm wäre perfekt, da die Welle 25mm Durchmesser >> hat. > > Mit 25mm kenne ich jetzt leider keines. Das von mir oben genannte ist > etwas kleiner als 80mm und wiegt geschätzt 50g. Wäre an sich doch nicht schlecht. Vielleicht bekomm ich das dann irgendwie anders auf die Welle geschraubt. Unter der Bezeichnung hab ich leider nicht wirklich was gefunden.
Jan B. schrieb: > Die Welle sollte aber möglichst nicht mehr viel schwerer > werden, da dann das Trainingsprinzip verfälscht wird. Dann würde ich einen Axial-Rotationssensor mit Dipolmagnet am Ende der Welle vorschlagen. Infineon TLE5012 oder AMS AS5200L oder Melexis MLX90385 oder sowas... Die Dinger mit SPI-Interface errechnen dir gleich den Winkel mit 360° Overflow-Erkennung und meist auch die Geschwindigkeit. Der Magnet wiegt vielleicht 5g und wird axial, quasi als Verlängerung der Welle befestigt. Hinkleben mit Epoxy reicht. mfg mf
Achim M. schrieb: > Jan B. schrieb: >> Die Welle sollte aber möglichst nicht mehr viel schwerer >> werden, da dann das Trainingsprinzip verfälscht wird. > > Dann würde ich einen Axial-Rotationssensor mit Dipolmagnet am Ende der > Welle vorschlagen. Infineon TLE5012 oder AMS AS5200L oder Melexis > MLX90385 oder sowas... > > Die Dinger mit SPI-Interface errechnen dir gleich den Winkel mit 360° > Overflow-Erkennung und meist auch die Geschwindigkeit. > > Der Magnet wiegt vielleicht 5g und wird axial, quasi als Verlängerung > der Welle befestigt. Hinkleben mit Epoxy reicht. > mfg mf Gibt dieser Sensor die Drehrichtung aus?
Hab hier mal eine PDF gefunden wo alle Sensoren von Infineon kommen. Ab Seite 28 kommen Hallsensoren. https://www.mouser.de/datasheet/2/196/Infineon_SensorSelectionGuide_ProductSelectionGuid-1840701.pdf Ziele: Geschwindigkeitausgabe Richtungsausgabe
Jan B. schrieb: > Gibt dieser Sensor die Drehrichtung aus? TLE5012B mit SSC(single wire SPI): Ja. AS5200L mit i2c: Winkel zyklisch auslesen und dann differenzieren. Dazu als Zielformat der Geschwindigkeit gleich signed-Datentyp benutzen und beim Differenzieren die Ring-Eigenschaften des signed-Datentyps ausnutzen. Also irgendwie auch Ja. MLX90385 wie beim AS200L. Irgendwie auch Ja.
Achim M. schrieb: > Jan B. schrieb: >> Gibt dieser Sensor die Drehrichtung aus? > > TLE5012B mit SSC(single wire SPI): Ja. > > AS5200L mit i2c: Winkel zyklisch auslesen und dann differenzieren. Dazu > als Zielformat der Geschwindigkeit gleich signed-Datentyp benutzen und > beim Differenzieren die Ring-Eigenschaften des signed-Datentyps > ausnutzen. Also irgendwie auch Ja. > > MLX90385 wie beim AS200L. Irgendwie auch Ja. Hört sich kompliziert an :D Ist das mit einem Arduino überhaupt möglich? SPI scheint mit einer Lib zu funktionieren. https://www.arduino.cc/en/Reference/SPI Damit ihr mal seht was ich eigentlich machen möchte. Das will ich bei meinem Gerät auch haben. https://www.youtube.com/watch?v=txBv6_mHfTo
hi, also wenn du eine alte Maus ausschlachtest hast du deine Doppellichtschranke in 2 Bauteilen.(Sender/Doppelempf.) Du kannst natürlich auch 2 unipolare Hallschalter mit etwas Versatz einbauen und mit irgendeinem Magnetrad schalten lassen. Die Anzahl der Magneten bestimmt die Auflösung. Ein Schrittmotor wäre in der selben Gruppe einzuordnen. Eine weitere Lösung wäre ein einfacher Tacho in Form eines kleinen Motörchens mit Permanentmagneten Spannungshöhe = Geschwindigkeit Spannungsrichtung = Drehrichtung. Ich denke du machst einfach zu viel Sackhüpfen um so ein banales Problem. Was soll denn werden wenn's mal wirklich kritisch wird? Viel Erfolg, Uwe
Uwe schrieb: > hi, > also wenn du eine alte Maus ausschlachtest hast du deine > Doppellichtschranke in 2 Bauteilen.(Sender/Doppelempf.) > Du kannst natürlich auch 2 unipolare Hallschalter mit etwas Versatz > einbauen > und mit irgendeinem Magnetrad schalten lassen. Die Anzahl der Magneten > bestimmt die Auflösung. > Ein Schrittmotor wäre in der selben Gruppe einzuordnen. > Eine weitere Lösung wäre ein einfacher Tacho in Form eines kleinen > Motörchens mit Permanentmagneten Spannungshöhe = Geschwindigkeit > Spannungsrichtung = Drehrichtung. > Ich denke du machst einfach zu viel Sackhüpfen um so ein banales > Problem. > Was soll denn werden wenn's mal wirklich kritisch wird? > > Viel Erfolg, Uwe Hallo Uwe, ja ich bin mir halt noch unsicher was ich selber am besten umsetzten kann. Was meinst du mit: Was soll den werden wenns mal wirklich kritisch wird?
hi,
>Was meinst du mit: Was soll den werden wenns mal wirklich kritisch wird?
na, zb. der legendäre Bauteiltester ist schon recht trickreih.
oder Versuche doch mal Leistungsmessung auf 3 Phase mit Wirk
/Blindenergie. mit einem Mega328 und Hünerfutter.
Oder Versuche dich doch mal am Wuchten deiner Autoreifen mit einfachsten
Mitteln. Oder, ....
Viel Erfolg, Uwe
Jan B. schrieb: > Hört sich kompliziert an :D > Ist das mit einem Arduino überhaupt möglich? Ja. Habe neulich so einen von AMS an einen ATtiny2313 ran gehängt. Jan B. schrieb: > Hört sich kompliziert an :D Weit weniger kompliziert als es ist. Pseudocode ungefähr so:
1 | int16_t Winkel_alt, Winkel_neu; |
2 | int16_t Speed; |
3 | |
4 | /* angenommen du bringst eine Funktion hin zum Winkel-Auslesen, die den 12-bit Winkel zurückgibt */
|
5 | int16_t Auslesen (){...} |
6 | |
7 | Timer_ISR() |
8 | {
|
9 | /* 0°...360°, die als 0...4095 vorliegen, auf vollen int16-Zahlenbereich -32768...+32767 aufblasen */
|
10 | Winkel_neu = Auslesen() << 4; |
11 | |
12 | /* Differenzieren. Speed ist nicht in RPM skaliert, sondern in ((65536 counts pro umdr.) pro Timer-Zykluszeit) !
|
13 | Hier nutzen wir bewusst den Überlauf der Subtraktion aus, weil 0° = 360° */
|
14 | Speed = Winkel_neu - Winkel_alt; |
15 | |
16 | /* Zu guter letzt den neuen Winkel als alten speichern, fuers Differenzieren im nächsten Zyklus */
|
17 | Winkel_alt = Winkel_neu; |
18 | }
|
mfg mf
Achim M. schrieb: > Jan B. schrieb: >> Die Welle sollte aber möglichst nicht mehr viel schwerer >> werden, da dann das Trainingsprinzip verfälscht wird. > > Dann würde ich einen Axial-Rotationssensor mit Dipolmagnet am Ende der > Welle vorschlagen. Infineon TLE5012 oder AMS AS5200L oder Melexis > MLX90385 oder sowas... > > Die Dinger mit SPI-Interface errechnen dir gleich den Winkel mit 360° > Overflow-Erkennung und meist auch die Geschwindigkeit. > > Der Magnet wiegt vielleicht 5g und wird axial, quasi als Verlängerung > der Welle befestigt. Hinkleben mit Epoxy reicht. > mfg mf Das heißt nur ein Magnet wird benötigt? Und wo finde ich so einen Magnet? Wenn ich das in Google suche, kommt nicht wirklich was. Hab gerade geschaut mein Oszi kann auf jeden Fall SPI-Protokoll anzeigen, dann müsste ich das auch irgendwie hin bekommen :)
Jan B. schrieb: > Das heißt nur ein Magnet wird benötigt? > Und wo finde ich so einen Magnet? Im Internet :D Einer von diesen NdFeB N52 Würfelchen 5x5x5mm³ oder wenig größer mit Br>1,4T wird es schon tun. Wichtig ist, dass das Feld radial zur Drehachse steht. Einigermaßen zentriert auf's Achsenende, weil die Feldlinie horizontal durch den Sensor geht, wenn der Sensor vor dir auf dem Tisch liegt. mfg mf PS. Ob die Feldstärke reicht, kann man mittels eines Feldstärke-Registers, manchmal auch reziprok mittels eines AGC-Registers vom Sensor auslesen und somit abschätzen.
Mit solchen hätte ich wenn ich das richtig verstanden habe ja dann 2 Pulse pro Umdrehung. Meinst das reicht? Sowas könnte ich sogar dann auf die Achse stecken und mit zwei Stellringe fest machen. https://www.magnet-shop.net/neodym/ringmagnete/ringmagnet-40.0-x-25.0-x-5.0-mm-n42-nickel-diametral?gclid=Cj0KCQiA-rj9BRCAARIsANB_4AAxkWQkza3UtQDh7fPpga70hs0QPch4OgxM-jlPBJ0Tsnc_bXpVcvQaAv0-EALw_wcB Oder so ein Ringmagnet. Den könnte ich an die Achse Zentrisch festschrauben. https://www.magnet-shop.net/neodym/ringmagnete/ringmagnet-12.0-x-4.0-x-6.0-mm-n50-nickel-diametral
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.