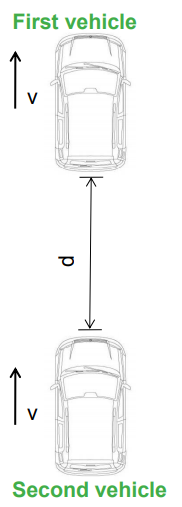
Liebe Freunde, im Rahmen einer kleinen Projektarbeit soll ich folgendes Beispiel durchzusimulieren. Folgendes Szenario wie im Bild zu sehen: Auto1 und Auto 2 haben einen Abstand d zueinander. Beide fahren mit gleicher Geschwindigkeit. Nun verzögert Auto1 das Fahrzeug mit der Beschleunigung a1. Auto2 verzögert nach einer Reaktionszeit von 0.5Sekunden (T_Reak) ebenfalls mit a2. Wie wahrscheinlich ist nun ein Aufprall? Kann mir da einer weiterhelfen?
Angehängte Dateien:
-

Cars.PNG
29 KB
Also die entsprechenden Gleichungen wäre ich dankbar, da ich die Distanz d und Treak als variabel annehmen möchte.
Vielleicht hier mal nachfragen, wenn man nicht selbst Denken will. https://www.studienkreis.de/online/sofort-hilfe/
Jens B. schrieb: > Vielleicht hier mal nachfragen, wenn man nicht selbst Denken will. > https://www.studienkreis.de/online/sofort-hilfe/ Danke für die sehr Hilfreiche Antwort. Vielleicht habe ich das Kleingeld nicht?
Position 1 = Anfangsposition 1 + Geschwindigkeit * Zeit + Beschleunigung * Zeit ^2 Position 2 = Anfangsposition 2 + Geschwindigkeit * Zeit + Beschleunigung * Zeit ^2 Jetzt überlege den Zeitpunkt des Bremsens von Auto 2, wo sich Auto 1 und Auto 2 dann befinden. Der Aufprall ist mit einer Wahrscheinlichkeit von 1 da, sobald Position 2 = Position 1.
Nur so als Ansatz, eventuell kommst du dann selbst zu einer guten Lösung: In dem Fall gibt es keine "Wahrscheinlichkeit" für den Aufprall. Entweder das Auto2 erreicht vor dem Stillstand das Auto1 oder nicht. Und das ist abhängig von deinen Eingangsgrößen Abstand, Geschwindigkeit und Verzögerung. Lass die Autos außen rum weg, dann hast du nur zwei Punkte mit konstanter Geschwindigkeit und Abstand. Zum Zeitpunkt x verzögert Punkt1, zum Zeitpunkt x+T_Reak verzögert Punkt2. Die Position beider Punkte zu jedem Zeitpunkt kannst du recht einfach berechnen. Das lässt sich z.B. auch wunderbar mit Excel durchspielen. Eine Spalte für die Zeit und zwei für die jeweilige Position. Dann sogar mit der Möglichkeit das als Diagramm mit Weg/Zeit auszugeben. Wenn nun die Position von Punkt2 größer-gleich der von Punkt1 wird, hat es gekracht.
Benjamin Nels schrieb: > Beide fahren mit > gleicher Geschwindigkeit. Wenn man die kennt, dann ist das Ganze problemlos berechenbar.
Benjamin Nels schrieb: > Wie wahrscheinlich ist nun ein Aufprall? Abhängig von den Werten von v, d, a1 und a2 ist die Wahrscheinlichkeit eines Aufpralls entweder 0 oder 1. Der Rest ist auch ohne Wahrscheinlichkeitsrechnung lösbar, man muss dafür auch kein Physiker oder Maschinenbauer sein.
lambda schrieb: > Wenn nun die Position von Punkt2 größer-gleich der von Punkt1 wird, hat > es gekracht. Wenn dann aber die Position von Punkt 2 sich immer weiter entfernt, hat Punkt 2 Unfallflucht begangen.
Pfau= Es durch Tee schrieb: > Wenn dann aber die Position von Punkt 2 sich immer weiter entfernt, hat > Punkt 2 Unfallflucht begangen. Oder hat bei a = 9,8m/s² die Leitplanke durchbrochen ;)
lambda schrieb: > Wenn nun die Position von Punkt2 größer-gleich der von Punkt1 wird, hat > es gekracht. In dem Fall könnte man tatsächlich in die Wahrscheinlichkeitsrechnung gehen - allerdings wäre dass dann die Letalität. Für's krachen lassen reicht es wenn Pos2-Pos1 <= Fahrzeuglänge ist.
Yalu X. schrieb: > Benjamin Nels schrieb: >> Wie wahrscheinlich ist nun ein Aufprall? > > Abhängig von den Werten von v, d, a1 und a2 ist die Wahrscheinlichkeit > eines Aufpralls entweder 0 oder 1. > > Der Rest ist auch ohne Wahrscheinlichkeitsrechnung lösbar, man muss > dafür auch kein Physiker oder Maschinenbauer sein. Ja mag sein, nur ist es so, dass ich erst mal bei a1 eine Konstante Verzögerung unterstelle. Doch was ist, wenn sich hier die Kennlinie ändert? Z.B. eine Treppenförmige Verzögerung oder eine lineare Verzögerung? Ich wollte dazu die Gleichungen allg. aufstellen und als Input in meinem Modell dann die Kennlinie der Verzögerung des Fahrzeugs 1 eingeben und als Output erhalte ich eine Kollision oder nicht. Variabel bleiben die Distanz, die gleiche Geschwindigkeit beider Fahrzeuge (wobei man diese Vereinfachung im nächsten Schritt dann fallen lassen kann und unterschiedliche Geschwindigkeiten akzeptiert) und die Reaktionszeit des hinteren Fahrers bleibt auch variabel. Da tu ich es mir momentan schwer & erhoffe mir hier halt entsprechenden Rat oder Tipps etc.
> Doch was ist, wenn sich hier die Kennlinie ändert? Z.B. eine Treppenförmige > Verzögerung oder eine lineare Verzögerung? Was soll das alles? Es ist deine Aufgabe, oben hast du ausreichend Anregungen bekommen, mit denen du sie selbstständig lösen kannst.
Suche Dir eine Schrittgröße für die Zeit aus, in der Du simulieren willst - z.B. 0.1s. Dann kannst Du für jeden Zeitschritt die aktuelle Geschwindigkeit (ausgehend von der letzten Geschwindigkeit, der zeitl. Schrittgröße und der für den Zeitschritt gültigen Beschleunigung) und die Position (aus der Zeit und der Geschwindigkeit) berechnen. Wenn dann die Positionen zu nahe beieinander liegen --> Bumm
Benjamin Nels schrieb: > Doch was ist, wenn sich hier die Kennlinie ändert? Z.B. eine > Treppenförmige Verzögerung oder eine lineare Verzögerung? Dann musst du das integrierten. Das Integral der Geschwindigkeit über die Zeit ist eine Entfernung. Das Integral der Beschleunigung über die Zeit ist eine Geschwindigkeit. Das kannst du jetzt schön verheiraten und eine beliebige Funktion für die Beschleunigung vorgeben. Auch Treppenfunktionen oder so sind da möglich.
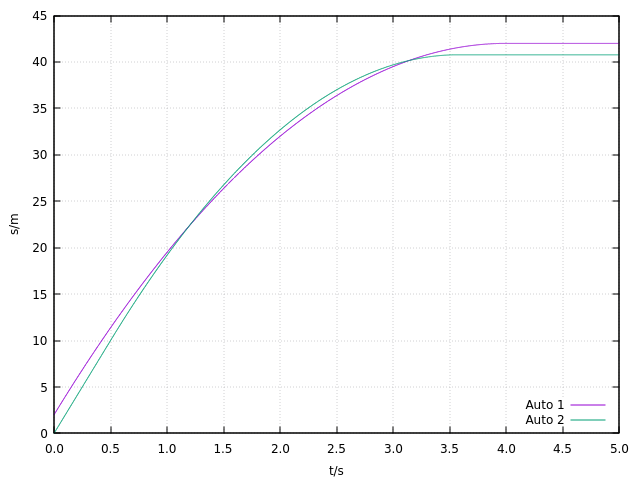
Benjamin Nels schrieb: > Ja mag sein, nur ist es so, dass ich erst mal bei a1 eine Konstante > Verzögerung unterstelle. Doch was ist, wenn sich hier die Kennlinie > ändert? Z.B. eine Treppenförmige Verzögerung oder eine lineare > Verzögerung? Wenn die Beschleunigungen zeitabhängig sind und als Funktionen a1(t) und a2(t) gegeben sind, führt das Ganze in die Integralrechnung. Ist a1(t) oder a2(t) nicht geschlossen integrierbar, wirst du wahrscheinlich auch keine geschlossenen Ungleichungen dafür finden, ob die Autos zusammenstoßen oder nicht. Aber wenn ich dich richtig verstanden habe, sollst du ja nicht die Gleichungen für den gesamten Ablauf aufstellen, sondern den Ablauf nur simulieren. Da genügt es, die Gleichungen für kleine Zeitschritte aufzustellen, wo sich die einzelnen Größen näherungsweise linear ändern. Das ist wesentlich einfacher. Das Ergebnis wären dann für gegebene a1(t), a2(t), d, v0, t_reak zwei Zeitreihen mit den Fahrzeugpositionen x1(t) und x2(t). Diese kannst du plotten, und wenn sich die Kurven irgendwo berühren oder schneiden, bedeutet das einen Aufprall.
Mach ne Fallunterscheidung: Fall1: Karre2 beginnt zu spät zu bremsen und kracht bei t < T_reak ungebremst auf Karre1 Fall2: Karre2 beginnt mit zu bremsen wenn d noch nicht 0 ist Fall: 2a die bremsung ist zu schwach und der Wagen kracht teil gebremst in den anderen Fall 2B: die Bremsung ist ausreichend stark und es verbleibt ein Restweg d_rest > 0 nachdem beide Autos zum Halt gegkommen sind Fall2 kann man anhand der Bewegungsgleichung weiter unterteilen ob der vordere Wagen zum stillstand gekommen ist, wenn der Krach sich ereignet, oder ob beide noch am Rollen sind. Es darf dann auch betrachtet werden, ob der Schaden größer ist, wenn beide Wagen in Bewegung sind, oder nur der hintere. PS In der Fahrschule lernt man die Faustregel; d muss mindestens 'Tacho/halbe' sein. Oder besser der Abstand d soll mindestens, die strecke sein die man in 2 sec durchfährt. In der WP steht mehr dazu: https://de.wikipedia.org/wiki/Sicherheitsabstand In dem Zusammenhang auch mal nach 'Reaktionsweg' recherchieren.
Bewegungsgleichungen aufstellen fuer beide Fahrzeuge und diese gleich setzen. Das ergibt eine Formel fuer den Zusammenstoss, abhaegig von delta t und delta a.
Kannst auch ein elektronisches Ersatzschaltbild daraus machen und mit ltspice simulieren. X: Startspannung Elko. a1 wird Aenderung des positiven Ladestromes, a2 wird Aenderung des negativen Ladestromes. Immer wenn die Spannung des Elkos kleiner gleich 0 wird, kracht es.
Für die Formel ist nur die Verzögerung "a" und der Fahrzeugabstand "d" wichtig. Die Geschwindigkeit "v" kürzt sich selbst raus.
Karl Knall schrieb: > bei t < T_reak > ungebremst auf Karre1 Danke, aber was genau ist hier t? Wenn T_reak=1sek. ist?
Danke für eure Hinweise, ich versuche dies mal so aufzustellen.
Benjamin Nels schrieb: > Jens B. schrieb: >> Vielleicht hier mal nachfragen, wenn man nicht selbst Denken will. >> https://www.studienkreis.de/online/sofort-hilfe/ > > Danke für die sehr Hilfreiche Antwort. Vielleicht habe ich das Kleingeld > nicht? Also willst du wirklich nur deine Hausaufgaben von anderen, für lau, machen lassen. Ich hoffe du fällst durch.
Jens B. schrieb: > Benjamin Nels schrieb: >> Jens B. schrieb: >>> Vielleicht hier mal nachfragen, wenn man nicht selbst Denken will. >>> https://www.studienkreis.de/online/sofort-hilfe/ >> >> Danke für die sehr Hilfreiche Antwort. Vielleicht habe ich das Kleingeld >> nicht? > > Also willst du wirklich nur deine Hausaufgaben von anderen, für lau, > machen lassen. > > Ich hoffe du fällst durch. Menschen von deinem Kaliber kenne ich, im Studium wahrscheinlich immer alleine, keine Freunde. Du bist nämlich die Kategorie, die es vielleicht weiß, den Kommilitionen aber erzählt, dass du es nicht weißt, nur in der Hoffnung, dass Sie vielleicht durchfallen. Du hast dir ja eine Lösung erarbeitet, schließlich sollen es dann die anderen auch. Teamgeist oder Helfen kommt da für dich nicht in Frage - ist vermutlich sogar ein Fremdwort.
Jens B. schrieb: > Also willst du wirklich nur deine Hausaufgaben von anderen, für lau, > machen lassen. > Ich hoffe du fällst durch. Meine Fresse, ihr ekelhaft überheblichen Forumsteilnehmer geht so dermaßen auf den Zeiger. Hat der TE gesagt "Los los mir die Aufgabe", oder hat der TE gesagt Benjamin Nels schrieb: > Kann mir da einer weiterhelfen? ? Was ja auch Lösungsansätze beinhaltet, nicht nur Komplettlösungen. Dir wünsch ich Durchfall und kurze Arme.
Benjamin Nels schrieb: > Menschen von deinem Kaliber kenne ich, im Studium wahrscheinlich immer > alleine, keine Freunde Schön dass ich nicht der einzige bin dem das auffällt.
J. T. schrieb: > Benjamin Nels schrieb: >> Menschen von deinem Kaliber kenne ich, im Studium wahrscheinlich immer >> alleine, keine Freunde > > Schön dass ich nicht der einzige bin dem das auffällt. Genau, ich musste ja lernen.
Benjamin Nels schrieb: > Du hast dir ja eine Lösung > erarbeitet, schließlich sollen es dann die anderen auch. Teamgeist oder > Helfen kommt da für dich nicht in Frage - ist vermutlich sogar ein > Fremdwort. Das ist nicht Dein ernst, oder? "Teamgeist" bedeutet für Dich, einer löst, andere schreiben ab? Jens B. schrieb: > Ich hoffe du fällst durch. Das hoffe ich auch.
Experte schrieb: > Benjamin Nels schrieb: >> Du hast dir ja eine Lösung >> erarbeitet, schließlich sollen es dann die anderen auch. Teamgeist oder >> Helfen kommt da für dich nicht in Frage - ist vermutlich sogar ein >> Fremdwort. > > Das ist nicht Dein ernst, oder? > > "Teamgeist" bedeutet für Dich, einer löst, andere schreiben ab? > > Jens B. schrieb: >> Ich hoffe du fällst durch. > > Das hoffe ich auch. Alles klar Jens.
Helmut Hungerland schrieb: > Für die Formel ist nur die Verzögerung "a" und der Fahrzeugabstand > "d" wichtig. Die Geschwindigkeit "v" kürzt sich selbst raus. ... denkt der BMW-Fahrer, und setzt sich bei 250 km/h nur 20 m hinter das Heck seines Vordermanns. In der 30er-Zone ist dieser Sicherheitsabstand schließlich auch ausreichend bemessen.
Gustl B. schrieb: > Dann musst du das integrierten. Das Integral der Geschwindigkeit über > die Zeit ist eine Entfernung. Das Integral der Beschleunigung über die > Zeit ist eine Geschwindigkeit. Das kannst du jetzt schön verheiraten und > eine beliebige Funktion für die Beschleunigung vorgeben. Auch > Treppenfunktionen oder so sind da möglich. Das habe ich nun gemacht, nur wo berücksichtige ich die Anfangsbedigungen? Also angenommen, zum Start besitzt das Fahrzeug die Geschwindigkeit v0 und den Weg s0. Nun möchte ich eine allg. Formel zwischen dem Weg und der Beschleunigung haben. Integration der Beschleunigung führt zu v(t)=
Dieses v(t) führe ich nun in das Integral: s(t)=
Wäre das so korrekt?
Die Allg. Gleichung, bei der ich eine beliebes a(t) vorgeben kann lautet nun:
mit
sodass nun gilt:
. Mit dieser Gleichung dürfte ich doch den Weg berechnen dürfen bei einem beliebigen a. Anschließend berechne ich noch unter berücksichtigung der Distanz und Treak noch den zweiten Weg und prüfe ob es zu einem Stoß kommt oder nicht.
Ich bin nur mit Lichtgeschwindigkeit unterwegs, da krachts ständig.
Der Witz einer solchen Projektarbeit ist nicht, das Ergebnis zu präsentieren, sondern der Weg, wie man dort hin kommt. Wenn Du den nicht selbstständig herleiten willst, wirst Du nichts dabei gelernt haben. Streng Dich an. Da muß man ein paar mal durch, dann klappt das danach fast von alleine.
Markus L. schrieb: > Der Witz einer solchen Projektarbeit ist nicht, das Ergebnis zu > präsentieren, sondern der Weg, wie man dort hin kommt. Wenn Du den nicht > selbstständig herleiten willst, wirst Du nichts dabei gelernt haben. > Streng Dich an. Da muß man ein paar mal durch, dann klappt das danach > fast von alleine. Es geht nur darum, meine Gedanken zu verfizieren bzw. hilfreiche Tipps etc.- Ich habe nicht gesagt, dass mir jmd die Lösung geben soll, oder wo steht das genau? Vielleicht hat aber jmd. noch ein anderen Super Tipp den man ebenflals berücksichtigen kann - ist es nicht Sinn und Zweck eines solchen Forums? Vielleicht habe ich ein Denkfehler und jmd klärt mich auf?
Nur, damit Du Deine "Simulation" (was immer das sein soll) kontrollieren kannst: Es kommt genau dann zum Crash, wenn
kleiner als Null ist, denn so groß ist die Lücke zwischen den Stoßstangen, nachdem die Autos zum Stillstand gekommen sind (Index "v" für das vordere und "h" für das hintere Auto). Um das hinschreiben zu können, muss man nur wissen, dass ein Fahrzeug, welches mit einer konstanten Verzögerung a von der Geschwindigkeit v auf Null abbremst, den Bremsweg
zurücklegt. Das folgt aus den Gleichungen s = 1/2 a t^2 und v = a t durch Eliminierung von t.
EinsUndEinsSindNichtImmerGleichDrei schrieb: > Nur, damit Du Deine "Simulation" (was immer das sein soll) kontrollieren > kannst: Es kommt genau dann zum Crash, wennd+v22av−vtreak−v22ah > d + \frac{v^2}{2 a_{\rm v}} - v t_{\rm reak} - \frac{v^2}{2 a_{\rm h}} > kleiner als Null ist, denn so groß ist die Lücke zwischen den > Stoßstangen, nachdem die Autos zum Stillstand gekommen sind (Index "v" > für das vordere und "h" für das hintere Auto). Herzlichen Dank für den Tipp. Obige Gleichung gilt jedoch nur, wenn a=konst. ist. Wenn a jedoch eine Funktion der Zeit ist, dann gilt die Gleichung nicht mehr, oder?
Benjamin Nels schrieb: > sodass nun gilt: > s(t)=∫t0∫τ′0(a(τ)dτ+v0)dτ′+s0 s(t)=\int_{0}^{t} \int_{0}^{\tau'} > (a(\tau)d\tau +v0) d\tau' +s0. > > Mit dieser Gleichung dürfte ich doch den Weg berechnen dürfen bei einem > beliebigen a. Anschließend berechne ich noch unter berücksichtigung der > Distanz und Treak noch den zweiten Weg und prüfe ob es zu einem Stoß > kommt oder nicht. Jetzt stehe ich schon vor dem Problem, dass ja beliebiges a(t) vorgegeben werden kann, jedoch kenne ich die Zeit t nicht, bzw. muss diese eliminieren, insbesondere wenn numerisch gerechnet werden soll?. Hat jmd ein Tipp?
Ich würds per Excel simulieren. Zeilen sind Zeitschritte. Erste Spalte durchnummerieren, zweite Spalte ist Erste mal Delta_t, also der Zeitpunkt. Dann die Position: x(t)= x(t-1) +Delta_x(t-1) mit Delta_x(t-1) = v(t-1) * Delta_t Dann die Geschwindigkeit: v(t) = v(t-1) + Delta_v mit Delta_v(t-1) = a(t-1) * Delta_t Dann die Beschleunigung (ist wohl vorgegeben...) Das ganze für beide Autos. Dann kann man noch schöne Diagramme zeichnen lassen und an der Stelle x_Auto1 = x_Auto2 hats gekracht. Nichts zu danken~
Maxe schrieb: > Ich würds per Excel simulieren. > > Zeilen sind Zeitschritte. Erste Spalte durchnummerieren, zweite Spalte > ist Erste mal Delta_t, also der Zeitpunkt. > > Dann die Position: > x(t)= x(t-1) +Delta_x(t-1) > mit Delta_x(t-1) = v(t-1) * Delta_t > > Dann die Geschwindigkeit: > v(t) = v(t-1) + Delta_v > mit Delta_v(t-1) = a(t-1) * Delta_t > > Dann die Beschleunigung (ist wohl vorgegeben...) > > Das ganze für beide Autos. Dann kann man noch schöne Diagramme zeichnen > lassen und an der Stelle x_Auto1 = x_Auto2 hats gekracht. > > Nichts zu danken~ Vielen Dank. Ich möchte erst mal den Bremsweg für ein Fahrzeug berechnen. Ich würde am liebsten eine generische Gleichung implementieren, bei der ich a(t) beliebig vorgeben kann, jedoch die Zeit t eliminiere...obige von mir angegebene Gleichung führt dazu, dass t noch vorhanden ist.
>Obige Gleichung gilt jedoch nur, wenn a=konst. ist.
Korrekt. Bei nicht-konstanter Bremsverzögerung sind Integrale Dein
Freund (wenn Du es rechnen willst). Der allgemeinste Fall einer
Abhängigkeit ist "a(t, x, v)", d. h. a kann von der Zeit t, und/oder von
der Position x und/oder von der Geschwindigkeit v abhängen. Was reale
Bremsvorgänge von Kraftfahrzeugen auf Straßen angeht, kommt man aber mit
der Näherung a = const zu ganz guten Ergebnissen (z. B. bei der Klärung
von Schuldfragen im Zusammenhang mit Unfällen).
Benjamin Nels schrieb: > Ich möchte erst mal den Bremsweg für ein Fahrzeug berechnen. Das wäre dann die Stelle an der v=0 ist.
Angehängte Dateien:
-

autos.png
19 KB
EinsUndEinsSindNichtImmerGleichDrei schrieb: > Es kommt genau dann zum Crash, wenn
> kleiner als Null ist,
Lass das "genau" weg, dann stimmt es. Es genügt nicht, nur den Anfangs-
und Endabstand der Autos zu betrachten.
Im folgenden Beispiel ergibt dein Term +1,231 m > 0:
1 | v = 20,0 m/s |
2 | d = 2,0 m |
3 | t_reak = 0,5 s |
4 | a_v = 5,0 m/s² |
5 | a_h = 6,5 m/s² |
Trotzdem stoßen die Autos bei t = 1,195 s zusammen.
Nach 0.5 sek ist v(vorne) um v=a*0.5 sek kleiner und somit nicht mehr die Anfangsgeschwindigkeit
Der Abstand ist nach der 0.5 sek auch d - (a(vorne)/2)*t*t und v(vorne) siehe vorherigen Beitrag => d ist kleiner und v(vorne) =! V(hinten)
Yalu X. schrieb: > EinsUndEinsSindNichtImmerGleichDrei schrieb: >> Es kommt genau dann zum Crash, wennd+v22av−vtreak−v22ah > d + \frac{v^2}{2 a_{\rm v}} - v t_{\rm reak} - \frac{v^2}{2 a_{\rm h}} >> kleiner als Null ist, > > Lass das "genau" weg, dann stimmt es. Es genügt nicht, nur den Anfangs- > und Endabstand der Autos zu betrachten. > > Im folgenden Beispiel ergibt dein Term +1,231 m > 0: > > v = 20,0 m/s > d = 2,0 m > t_reak = 0,5 s > a_v = 5,0 m/s² > a_h = 6,5 m/s² > > Trotzdem stoßen die Autos bei t = 1,195 s zusammen. Mir ist eine Sache nicht klar. Die Berechnungen führen dazu, dass a=konst. angenommen worden sind. Wenn wir erst mal ganz allg. den Weg in Abhängigkeit einer beliebigen Beschleunigung angeben, dann haben wir folgende Formel:
Nun weis ich, dass es zu einem Unfall kommt, wenn s1=s2 ist. Der hintere Bremst konstant mit einem 1g, wohingegen der vordere eine beliebige Funktion haben kann. Wie würdest du am besten das implementieren, wenn die Gleichung so generisch ist? Insbesondere im Hinblick, dass ich vll. 1 Mio Berechnungen durchführe, z.B. dass der Abstand gausverteilt ist. Wie ermittelt man am besten die Zeit, bei der es zu einem Anstoß kommt? Es kann natürlich auch sein, dass es für gewisse Abstände keinen Anstoß gibt.
Gerd schrieb: > Position 1 = Anfangsposition 1 + Geschwindigkeit * Zeit + Beschleunigung > * Zeit ^2 > Position 2 = Anfangsposition 2 + Geschwindigkeit * Zeit + Beschleunigung > * Zeit ^2 > > Jetzt überlege den Zeitpunkt des Bremsens von Auto 2, wo sich Auto 1 und > Auto 2 dann befinden. > > Der Aufprall ist mit einer Wahrscheinlichkeit von 1 da, sobald Position > 2 = Position 1. Stimmt nicht so ganz. Du hast den Faktor 0.5 auf dem Weg verloren.
@Yalu: Ja, Dein Einwand ist berechtigt. Letztlich hat man es hier mit der Fragestellung zu tun, ob und gegebenenfalls wieviele Punkte zwei quadratische Parabeln gemeinsam haben und wo diese liegen. Da gibt es immerhin vier Fälle (wenn man "genau einen Berührpunkt" und "genau einen Schnittpunkt" separat zählt) und alle sind mit realistischen Werten für die Parameter (d, v, t_reak, a_vorne, a_hinten) möglich. Weil jede Parabel vor Beginn des Bremsvorgangs auch noch in eine Gerade mit der Steigung v und nach Ende des Bremsvorgangs in eine waagerechte Gerade übergeht, muss man für eine korrekte Lösung mit entsprechenden Fallunterscheidungen nach t arbeiten (es gibt vier Zeitpunkte, wo sich Beschleunigungen ändern: 0, t_reak, v/a_vorne und t_reak + v/a_hinten). Das macht es zu einem insgesamt durchaus anspruchsvollen Problem - ganz nett für eine Projektarbeit. Danke für Dein Feedback.
Benjamin Nels schrieb: > Mir ist eine Sache nicht klar. Die Berechnungen führen dazu, dass > a=konst. angenommen worden sind. Du hast ja nichts anderes angegeben. Oben sieht das ganze wie eine Aufgabe für Physik 10. oder 11. Klasse aus. Jetzt willst du auf einmal beliebige Funktionen für die Beschleunigung und willst Millionen Berechnungen für unterschiedliche Werte. Mal wieder typisch: Problembeschreibung mangelhaft. Wenn es beliebige Funktionen sein könne, würde ich die Funktionen als Parameter für ein Programm nehmen und eine numerische Simulation schreiben. Dann werden die Integrale zu Summen. Ein weiterer wichtiger Parameter ist dann die Schrittweite. Dafür kann man bestimmt Software wie Mathlab oder Simulink benutzen oder man schreibt es sich in seiner bevorzugten Programmiersprache. Benjamin Nels schrieb: > Teamgeist oder Helfen kommt da für dich nicht in Frage Ich habe immer wieder die Erfahrung gemacht dass die die am lautesten den Teamgeist beschwören darunter genau das verstehen: Toll Ein Anderer Machts Und deine Frage oben klang genau so als ob du nicht mal für die Formulierung der Frage Aufwand spendieren wolltest sondern nur möglichst schnell eine Lösung ohne eigene Anstrengung haben willst.
@Benjamin Nels: Wenn sich ein Auto zum Zeitpunkt t mit der Geschwindigkeit v bewegt und die Momentanbeschleunigung a erfährt, welche Geschwindigkeit hat es dann zum Zeitpunkt t + dt? Wenn es sich zu diesem Zeipunkt gerade (v schnell) auf der Position x befindet, welche Position hat es dann zum Zeitpunkt t + dt?
Benjamin Nels schrieb: > Wie wahrscheinlich ist nun ein Aufprall? Die Wahrscheinlichkeit ist 100%, falls sich Auto 2 immer noch Auto 1 annähert, wenn der Abstand 0 wird.
..als spice Fan klar https://www.analog.com/en/design-center/design-tools-and-calculators/ltspice-simulator.html je eine B-Quelle http://ltwiki.org/index.php?title=B_sources_(complete_reference) pro Fzg https://www.digikey.com/eewiki/display/Motley/LTspice+Tips+-+Mathematical+Integration und wenn es allgemeiner werden soll http://www.amesys.de/
Benjamin Nels schrieb: > Wie ermittelt man am besten die Zeit, bei der es zu einem Anstoß kommt? In dem Du erst mal die Aufgabe für den klassischen Fall mit den einfachen Gleichungen löst, wie beim Abi. Und dann gehst Du über das mit Integralen aufzubauen. Vermutlich wird das dann nur noch mit iterativen Verfahren lösbar.
Angehängte Dateien:
-

drei-autos.png
19 KB
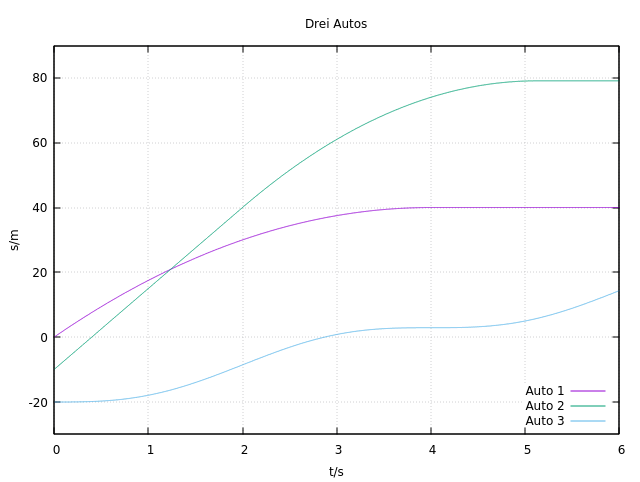
Ich habe mal ein kleines Programm zusammengeklopft, das mehrere Autos simuliert, wobei die Beschleunigung eine beliebige Funktion der Zeit, der Position und der Geschwindigkeit sein kann. Das Ergebnis des Programmlaufs ist eine Zahlenkolonne mit Spalten für die Zeit und für die Position, die Geschwindigkeit und die Beschleunigung jedes Autos. Aus dieser Zahlenkolonne kann mittels eines Plotprogramms ein Diagramm mit den gewünschten Größen erstellt werden. Die eigentliche Simulation steckt in den 7 Zeilen der Funktion simu.
>Die eigentliche Simulation steckt in den 7 Zeilen der Funktion simu.
Na Glückwunsch, Du kannst es. Der TO hätte aber ganz bestimmt auch
selbst herausgefunden, wie das Eulersche Polygonzugverfahren
funktioniert. Wäre das für ihn nicht ein schöneres Erlebnis gewesen, als
es auf dem Silbertablett präsentiert zu bekommen?
Just my two cents.
kann .hs leider nicht öffnen :-( Welches programm wurde verwendet ?! :-)
UndEinsSindNichtImmerGleichDrei schrieb: > Wäre das für ihn nicht ein schöneres Erlebnis gewesen, als es auf dem > Silbertablett präsentiert zu bekommen? Naja, allzu silbern ist das Tablett nicht. Silbern wäre es, wenn ich das Ganze in dem (ach so beliebten ;-)) Excel implementiert hätte. Wie man die Geschwindigkeiten und Positionen der Autos schrittweise rekursiv berechnet, wurde hier übrigens schon mehrfach gezeigt, da habe ich nichts Neues verraten. Michel M. schrieb: > Welches programm wurde verwendet ?! :-) GHC: https://www.haskell.org/ghc/
Yalu X. schrieb: > ch habe mal ein kleines Programm zusammengeklopft, das mehrere Autos > simuliert, wobei die Beschleunigung eine beliebige Funktion der Zeit, > der Position und der Geschwindigkeit sein kann. Das sind nur ein paar herausgegriffene Einzelwerte. Jetzt brauchst du noch die Häufigkeitsverteilung für die Anfangswerte der Geschwindigkeiten, für die Bremsbeschleunigung und für die Abstände. Zusammen mit den Kreuzkorrelationen dieser Größen kann man dann z.B. per Monte Carlo Simulation die Antwort auf die Frage nach der Kollisionswahrscheinlichkeit finden. Benjamin Nels schrieb: > Wie wahrscheinlich ist nun ein Aufprall?
Benjamin Nels schrieb: > Wie wahrscheinlich ist nun ein Aufprall? Was ist das den für ein merkwürdiger Aufgabentyp?
Jan H. schrieb: > Helmut Hungerland schrieb: > >> Für die Formel ist nur die Verzögerung "a" und der Fahrzeugabstand >> "d" wichtig. Die Geschwindigkeit "v" kürzt sich selbst raus. > > ... denkt der BMW-Fahrer, und setzt sich bei 250 km/h nur 20 m hinter > das Heck seines Vordermanns. > In der 30er-Zone ist dieser Sicherheitsabstand schließlich auch > ausreichend bemessen. Wenn die Verzögerung 1 Meter pro Sekunde beträgt, dann ist es egal ob die Verzögerung bei einer Geschwindigkeit von 30 km/h oder bei 400 km/h (Bugatti 1001) eingeleitet wird. Der Aufprall wird in beiden Fällen in spätestens 6 Sekunden passieren (bei einem Abstand von 20 Meter). Das vordere 30km/h schnelle Fahrzeug muss sogar noch den Rückwärtsgang einlegen, um die Verzögerung von 1 Meter pro Sekunde aufrecht zu halten.
Helmut Hungerland schrieb: > Wenn die Verzögerung 1 Meter pro Sekunde beträgt, dann ist es egal ob > die Verzögerung bei einer Geschwindigkeit von 30 km/h oder bei 400 km/h > (Bugatti 1001) eingeleitet wird. Der Aufprall wird in beiden Fällen in > spätestens 6 Sekunden passieren (bei einem Abstand von 20 Meter). das war wohl die Fragestellung?
Yalu X. schrieb: > Michel M. schrieb: >> Welches programm wurde verwendet ?! :-) > > GHC: > > https://www.haskell.org/ghc/ besten Dank, kannte ich noch nicht :-)
Yalu X. schrieb: > Abhängig von den Werten von v, d, a1 und a2 Wie alt ist Fahrer a1? Das fehlt noch, da Fahrer a2 zwingend jünger als fünfzig Jahre ist.
> Wenn die Verzögerung 1 Meter pro Sekunde beträgt, ...
Die Dimension der "Verzögerung" ist Länge/(Zeit)².
Eine (zweckmässige) Einheit könnte z.B. sein: m/s² ;-)
Elektrofan schrieb: > Die Dimension der "Verzögerung" ist Länge/(Zeit)². Genau genommen ist die Dimension der "Verzögerung" Geschwindigkeit/Zeit. Denn eine Beschleunigung beschreibt, wie sehr sich dein Geschwindigkeitsvektor in welcher Zeit verändert.
>Denn eine Beschleunigung beschreibt, wie sehr sich dein >Geschwindigkeitsvektor in welcher Zeit verändert. Stimmt, und ganz wichtig noch: Mit dieser Zeit ist immer die Eigenzeit des beschleunigten Körpers gemeint. Lässt man den Fuß solange auf dem Gas, bis die Tachonadel 539 626 410 km/h anzeigt (= c/2), muss man das wissen :-)
EinsUndEinsSindNichtImmerGleichDrei schrieb: > Nur, damit Du Deine "Simulation" (was immer das sein soll) kontrollieren > kannst: Es kommt genau dann zum Crash, wenn >
> kleiner als Null ist, denn so groß ist die Lücke zwischen den > Stoßstangen, nachdem die Autos zum Stillstand gekommen sind (Index "v" > für das vordere und "h" für das hintere Auto). <murmel>...für Autos der Länge 0...</murmel> SCNR.
Benjamin Nels schrieb: > EinsUndEinsSindNichtImmerGleichDrei schrieb: >> Nur, damit Du Deine "Simulation" (was immer das sein soll) kontrollieren >> kannst: Es kommt genau dann zum Crash, wennd+v22av−vtreak−v22ah >> d + \frac{v^2}{2 a_{\rm v}} - v t_{\rm reak} - \frac{v^2}{2 a_{\rm h}} >> kleiner als Null ist, denn so groß ist die Lücke zwischen den >> Stoßstangen, nachdem die Autos zum Stillstand gekommen sind (Index "v" >> für das vordere und "h" für das hintere Auto). > > Herzlichen Dank für den Tipp. Obige Gleichung gilt jedoch nur, wenn > a=konst. ist. > > Wenn a jedoch eine Funktion der Zeit ist, dann gilt die Gleichung nicht > mehr, oder? Ist a denn eine Funktion der Zeit? Daß die Bremsen schon 'runter sind und die Bremswirkung bei zunehmender Bremstemperatur nachläßt, hast Du bisher noch gar nicht erwähnt. Vielleicht ein anderer Denkansatz: wenn a1 == a2 ist -- was der Regelfall sein dürfte -- dann ist t0 = 0 und t1 = t0 + 0.5... :-)
Yalu X. schrieb: > Ich habe mal ein kleines Programm zusammengeklopft, das mehrere Autos > simuliert, wobei die Beschleunigung eine beliebige Funktion der Zeit, > der Position und der Geschwindigkeit sein kann. Allerdings... in diesem Punkt ist die Formulierung des Fragestellers leider ein wenig mehrdeutig, wenn er schreibt: "Nun verzögert Auto1 das Fahrzeug mit der Beschleunigung a1. Auto2 verzögert nach einer Reaktionszeit von 0.5Sekunden (T_Reak) ebenfalls mit a2." Aus der Formulierung "ebenfalls" schließe ich, daß a1 == a2 ist, was bei normalen, idealisierten KFZ wohl die Regel sein dürfte. Außerdem sind die Beschleunigungen als "a1" und "a2" angegeben, insofern ich vermute, daß es sich bei "a1" und "a2" um konstante negative Beschleunigungen handelt...
Jemand schrieb: > Aus der Formulierung "ebenfalls" schließe ich, daß a1 == a2 ist, Fehlschluß aus Bequemlichkeit.
Jetzt aber weg mit diesem Minderleister. Die Bedingungen kann man geschlossen hinschreiben, ohne Simulationen.
Fpgakuechle K. schrieb: > Jemand schrieb: >> Aus der Formulierung "ebenfalls" schließe ich, daß a1 == a2 ist, > > Fehlschluß aus Bequemlichkeit. Warum?
>...für Autos der Länge 0...
Für Autos beliebiger Länge (auch kilometerlang und unterschiedlch
lang!), weil sowohl der Parameter d (siehe Skizze vom TO) als auch das
Ergebnis meiner Formel die Länge der Lücke zwischen den Stoßstangen
angibt. Bei dieser Abstandsdefinition müssen die Längen der Autos
nirgendwo in der Rechnung berücksichtigt werden - das ist ja das Gute
daran.
Angehängte Dateien:
-

Bremsweg.PNG
21 KB
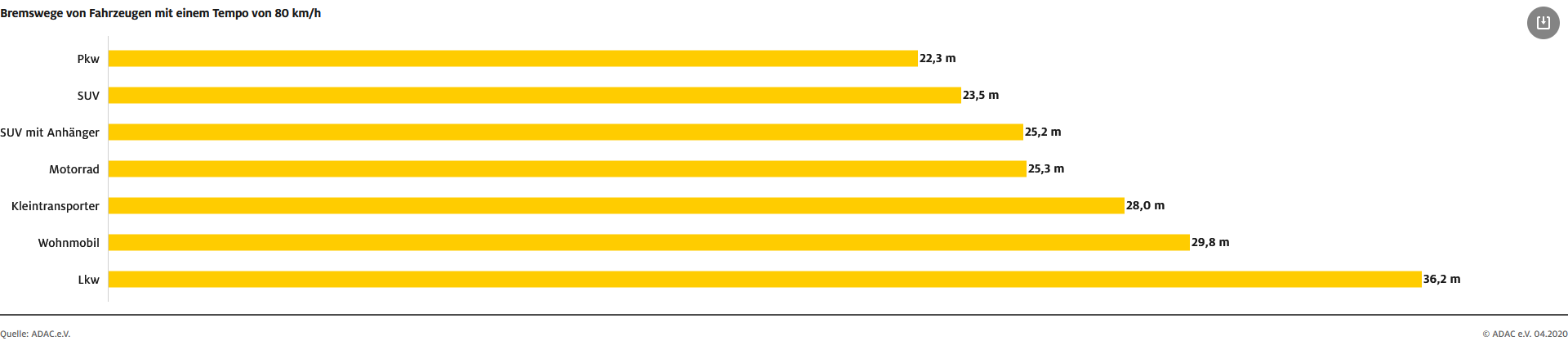
Sheeva P. schrieb: > Fpgakuechle K. schrieb: >> Jemand schrieb: >>> Aus der Formulierung "ebenfalls" schließe ich, daß a1 == a2 ist, >> >> Fehlschluß aus Bequemlichkeit. > > Warum? Offensichtlich aus Allgemeinbildung: -unterschiedliche Formelzeichen aka Identifier bedeutet unterschiedliche Größen. Falls die gleiche Größe gemeint wäre (wie beispielsweise die Geschwindigkeit v) würde das gleiche Formelzeichen verwendet. -unterschiedliche Fahrzeuge haben unterschiedliche Bremswege und damit unterschiedliche Beschleunigungen beim Bremsen. Wer das nicht aus der Fahrschule/eigene Fahrpraxis kennt, kann das easy nachgoogeln. Siehe Anhang und https://img1.motorradonline.de/image-169Inline-7aaaeacf-1419757.jpg (Auswahl Motoräder). Oder Bremswegtabellen https://www.yumpu.com/de/document/read/1404260/bremswegtabellen-advocat24 (PKW, trockener Asphalt 7.5 - 9 m/s*s. Oder bei Oldtimern: https://www.zwischengas.com/de/bilder/Blog2020/12_2020/Allianz_Studie_Bremsverzoegerung_c_VKU.jpg
Das soll Physik sein? schrieb: > Benjamin Nels schrieb: >> Wie wahrscheinlich ist nun ein Aufprall? > > Was ist das den für ein merkwürdiger Aufgabentyp? Das ist eine typische Aufgabenstellung die sich der Lösungsmethoden der Stochastik/Statistik bedient. Kommt in der Thermodynamik und Atomphysik häufiger vor, bspw ist die Halbwertszeit eine statistische Größe. Oder in der Experimentalphysik bei der Abschätzung der Auswirkung von Messfehlern. Hier (Verkehrsunfallstatistik) wird es gebraucht um eine zuverlässige Abstandsregel aufzustellen die möglichst für alle Verkehrsteilnehmer (lange, kurze Bremsstrecke, unterschiedliche Reaktionszeit) 'funktioniert'.
Pandur S. schrieb: > Jetzt aber weg mit diesem Minderleister. Die Bedingungen kann man > geschlossen hinschreiben, ohne Simulationen. Damit bekommst du für eine Parameterkombination die Aussage kollidiert/kollidiert nicht. Das ist noch weit entfernt von einer Aussage für die Aufprallwahrscheinlichkeit bei irgendwelchen bisher nicht genannten Verteilungen/Korrelationen für die Parameter.
Fpgakuechle K. schrieb: > unterschiedliche Fahrzeuge haben unterschiedliche Bremswege Die Graphik mit dem unterschiedlichen Bremsweg ist so auch nicht korrekt. Mit ABS sind die Bremswege von PKW und LKW gleich. Früher, als nur die LKW ABS hatten wurde sogar gewarnt davor das nicht zu unterschätzen. Der längere Bremsweg bei LKW ist hier nur ein Mittelwert unter Berücksichtigung das es noch aus Oststaaten LKW ohne oder nur mit ABS der ersteren noch nicht so effektiven Generation gibt. Hintergrund der Frage des TO dürfte sein, bei welcher Geschwindigkeit mit dem Mindestabstand die meisten Fahrzeugetransportkapazität eine Straße hat. Das wurde bereits schon im Jahre 1992 gelöst. Diese liegt bei rund 30km/h. Wenn es wieder flüssiger läuft, würde sich der Stau genau bei dieser Geschwindigkeit optimal auflösen. D.h. sobald es besser wird, so lange wie der Abstand zum Vordermann nicht zu groß wird, sollte bei den 30km/h geblieben werden. Wenn eine Spur entfallen sollte, wäre das genau die Geschwindikgeit, bei der man vorher schon immer Lücke auf Lücke versetzt ein paar hundert Meter vor dem Einfädeln beginnen sollte anzuordnen. Dadürch würde das Doppelte an Stoßverkehr benötigt als es heute zum Stau kommt. Die heutigen Sensoren im Auto würden es heute schon erlauben den Stinkstiefeln, die sich nicht daran halten per Audioausgabe vom µC im Auto sagen zu lassen, was für Drecksäcke sie sind und per Mobilnetz eine sofortige Panne des Fahrzeuges einleiten.
Angehängte Dateien:
-

Fahrzeugsimulation.jpg
350 KB
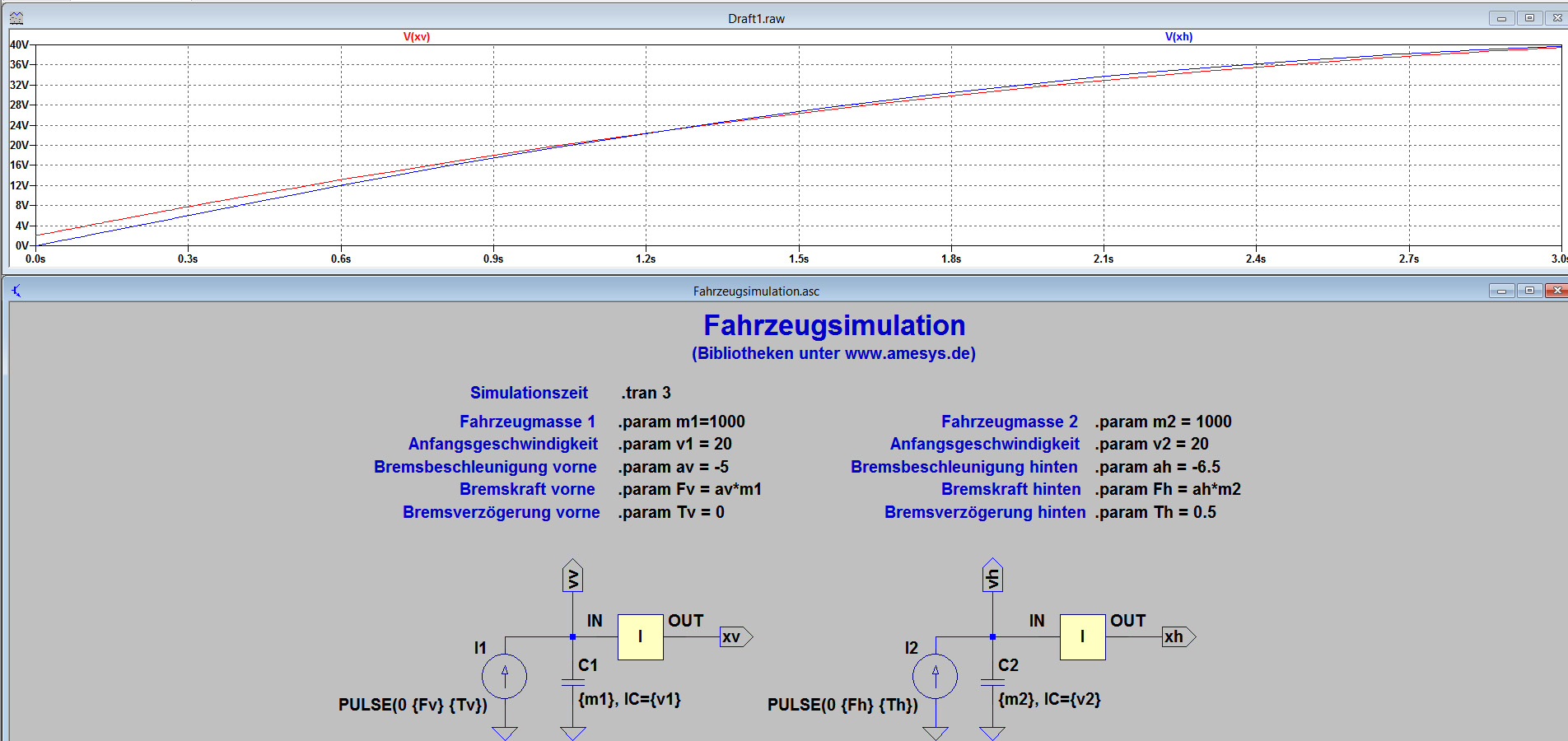
Es wurde ja weiter oben schon mal angesprochen. Die Aufgabe kann sehr einfach mit LTspice gelöst werden. Ich habe für das Beispiel die Eingangsdaten von Yalu X. gewählt.
Fpgakuechle K. schrieb: > Sheeva P. schrieb: >> Fpgakuechle K. schrieb: >>> Jemand schrieb: >>>> Aus der Formulierung "ebenfalls" schließe ich, daß a1 == a2 ist, >>> >>> Fehlschluß aus Bequemlichkeit. >> >> Warum? > > Offensichtlich aus Allgemeinbildung: > -unterschiedliche Formelzeichen aka Identifier bedeutet unterschiedliche > Größen. Falls die gleiche Größe gemeint wäre (wie beispielsweise die > Geschwindigkeit v) würde das gleiche Formelzeichen verwendet. Die Terme sind "Auto1" und "Auto 2", für die Verzögerung ist "a1" und "ebenfalls a2" angesetzt. Klugscheißen 1, Lesen 0.
Man kann annehmen, dass der korrekte Platz für das fehlende Komma folgender ist... "Auto2 verzögert nach einer Reaktioszeit ebenfalls, mit a2." ...weil die Alternative... "Auto2 verzögert nach einer Reaktioszeit, ebenfalls mit a2." ...kaum Sinn macht, denn warum sollte man für dieselbe Beschleunigung einen anderen Bezeichner wählen?
>Die Aufgabe kann sehr einfach mit LTspice gelöst werden.
Und noch viel mehr: Man kann die Größen Position, Geschwindigkeit,
Beschleunigung und Masse bestimmt auch in Wärmeströme, Temperaturen,
Strahlungsintensitäten und spezifische Wärmekapazitäten übersetzen und
das Problem anschließend mit einer Software zur Planung von
Niedrigenergiehäusern lösen :-)
LostInMusic schrieb: > Man kann annehmen, Nö. > dass der korrekte Platz für das fehlende Komma > folgender ist... Da ist kein Komma. Es fehlt auch keins. > warum sollte man für dieselbe Beschleunigung > einen anderen Bezeichner wählen? Weil es nicht dieselbe "Beschleunigung" -- eigentlich: Verzögerung -- ist. Die Verzögerung a1 bezieht sich offensichtlich auf das Fahrzeug Auto1, während die Verzögerung a2 sich auf das Fahrzeug "Auto 2" bezieht. Über die Werte dieser Verzögerungen sagt das überhaupt nichts aus. Im Gegenteil deutet das (ansonsten vollkommen überflüssige) Wort "ebenfalls" tatsächlich an, daß die Werte der beiden Verzögerungen gleich sind. Das kann aber nur der TO aufklären.
LostInMusic schrieb: > Und noch viel mehr: Man kann die Größen Position, Geschwindigkeit, > Beschleunigung und Masse bestimmt auch in Wärmeströme, Temperaturen, ... Der ironische Zungenschlag ist mir nicht entgangen, allein das Beispiel der Thermodynamik hinkt etwas. Die Entropie ist im Gegensatz zur Ladung oder zum Impuls keine Erhaltungsgröße, eine thermische Induktivität wird durch den 2. HS verhindert und Dissipation ist immer mit Entropiezuwachs verbunden. Eine Software zur Auslegung von hydraulischen Systemen ist da besser geeignet ;-)
Jemand schrieb: > Im Gegenteil deutet das (ansonsten vollkommen überflüssige) Wort > "ebenfalls" tatsächlich an, daß die Werte der beiden Verzögerungen > gleich sind. Geh davon aus, dass a1 und a2 unabhängig voneinander beliebige annehmen können. Das "ebenfalls" kann sich unmöglich auf a2 beziehen, da dieses im Text davor noch gar nicht erwähnt wurde. Also kann es sich nur auf das "verzögert" beziehen, d.h. nicht nur Auto1 verzögert, sondern auch Auto2, aber evtl. mit einem anderen Wert. > Das kann aber nur der TO aufklären. Mittlerweile sind die Verzögerungen nicht einmal mehr als konstant zu betrachten: Benjamin Nels schrieb: > Ja mag sein, nur ist es so, dass ich erst mal bei a1 eine Konstante > Verzögerung unterstelle. Doch was ist, wenn sich hier die Kennlinie > ändert? Z.B. eine Treppenförmige Verzögerung oder eine lineare > Verzögerung?
@Jemand: >Im Gegenteil deutet das (ansonsten vollkommen überflüssige) Wort >"ebenfalls" tatsächlich an, daß die Werte der beiden Verzögerungen >gleich sind. Die Verzögerungen sind höchstwahrscheinlich schon deshalb nicht gleich, weil das Problem sonst trivial wäre (Crash genau dann, wenn d < v t_reak).
Benjamin Nels schrieb: > Teamgeist oder > Helfen kommt da für dich nicht in Frage - ist vermutlich sogar ein > Fremdwort. Ach, du gehörst auch zu jenen für die "Team" bedeutet "toll ein anderer machts"?
Jemand schrieb: > LostInMusic schrieb: >> Man kann annehmen, > > Nö. > >> dass der korrekte Platz für das fehlende Komma >> folgender ist... > > Da ist kein Komma. Es fehlt auch keins. > >> warum sollte man für dieselbe Beschleunigung >> einen anderen Bezeichner wählen? > > Über die Werte dieser Verzögerungen sagt das überhaupt nichts > aus. Im Gegenteil deutet das (ansonsten vollkommen überflüssige) Wort > "ebenfalls" tatsächlich an, daß die Werte der beiden Verzögerungen > gleich sind. Das kann aber nur der TO aufklären. Hat er bereits, siehe seine Skizze. Gleiche Größen gleiches Formelzeichen, hier Geschwindigkeit. Unterschiedliches Formelzeichen unterschiedliche Größen. Das Wort 'ebenfalls' bedeudet lediglich, das auch A2 von gleichförmiger in beschleunigte Bewegung wechselt, das der Wert der Beschleunigung derselbe ist, deutet nur hinein, wer zu bequem ist mit mehreren Eingangsgrößen zu rechnen. >Die Terme sind "Auto1" und "Auto 2", für die Verzögerung ist "a1" und >"ebenfalls a2" angesetzt. Klugscheißen 1, Lesen 0. Und wenn Du hier wie Rumpelstilzchen übers Feuer hüpft und zeterst wie ein gestäubtes Waschweib - die Annahme das die Bremsbeschleunigung für beide Fahrzeuge gleich ist mag faulen Möchtegerns die Rechnung erleichtern, geht aber der Realität vorbei. Und ein Modell/Simulation das an der Realität vorbei geht ist hirnbefreite Zeitverschwendung.
Fpgakuechle K. schrieb: > Und wenn Du hier wie Rumpelstilzchen übers Feuer hüpft und zeterst wie > ein gestäubtes Waschweib - die Annahme das die Bremsbeschleunigung für > beide Fahrzeuge gleich ist mag faulen Möchtegerns die Rechnung > erleichtern, geht aber der Realität vorbei. Und ein Modell/Simulation > das an der Realität vorbei geht ist hirnbefreite Zeitverschwendung. Ach, Hase, der geneigte Leser sieht sofort, wer hier "übers Feuer hüpft" und "zetert", gleichzeitig aber komplett unfähig war, auch nur ein einziges Wort zum Thema des TO beizutragen: Du. Mehr als Unterstellungen, Beschimpfungen und Beleidigungen hast Du also ganz offensichtlich nicht drauf. Du mußt ein sehr trauriges Leben haben und ein unglücklicher, zutiefst frustrierter Mensch sein, und mit jedem Deiner Beiträge tust Du mir ein kleines bisschen mehr leid.
Jemand schrieb: > Fpgakuechle K. schrieb: >> die Annahme das die Bremsbeschleunigung für >> beide Fahrzeuge gleich ist mag faulen Möchtegerns die Rechnung >> erleichtern, geht aber der Realität vorbei. Und ein Modell/Simulation >> das an der Realität vorbei geht ist hirnbefreite Zeitverschwendung. > > Ach, Hase, der geneigte Leser sieht sofort, wer hier "übers Feuer hüpft" > und "zetert", gleichzeitig aber komplett unfähig war, auch nur ein > einziges Wort zum Thema des TO beizutragen: Du. Auch hier liegst Du komplett falsch, aber daran biste ja gewöhnt. Ich wünsch dir einen Eingebungsvollen Osterspaziergang bei Sonnigen Wetter der Deine verdorrte Fähigkeit zur Selbsterkenntniss aufblühen lässt und hoffe das dann solche irrigen Behauptungen wie "Alle bremsen gleich" unterbleiben. Sonst müsste man ernstahft daran gehen einen Paragraphen wegen "Volksverdummung" zu einzuführen ;-)
Fpgakuechle K. schrieb: > Ich wünsch dir einen Eingebungsvollen Osterspaziergang bei Sonnigen > Wetter der Deine verdorrte Fähigkeit zur Selbsterkenntniss aufblühen > lässt und hoffe das dann solche irrigen Behauptungen wie "Alle bremsen > gleich" unterbleiben. Sonst müsste man ernstahft daran gehen einen > Paragraphen wegen "Volksverdummung" zu einzuführen ;-) Daß Dich meine in der Praxis absolut gebräuchliche Vereinfachung so aus der Fassung bringt, daß Du sogar über ein eigenes Gesetz für Dich nachdenkst, tut mir wirklich leid, aber das konnte ich ja nicht ahnen. Ich habe nunmal diese dumme Angewohnheit, meine Mitmenschen für intelligente, vernunftbegabte und geistig gesunde Wesen zu halten. Bitte entschuldige, daß ich da in Deinem Falle so falsch gelegen habe, das wird mir hoffentlich nicht nochmal passieren. Bis dahin wünsche ich Dir einen schönen, entspannten Tag, und da Du schon nichts zum Thema beitragen kannst, möchte ich Dir ein alters- und reifeangemessenes Video zur Entspannung wärmstens ans Herz legen: https://www.youtube.com/watch?v=PUCgC_TukKg Nun, Du wirst meine freundliche Bitte um Verzeihung nicht ohne neuerliche Pöbeleien stehen lassen können. Daher bin ich gerne großzügig, überlasse Dir das letzte Wort und verabschiede mich mit der angemessenen Hochachtung. Guten Tag.
Wenn jedes Fahrzeug eine Vollbremsung mit einem gleichwertigen ABS hinlegt, wären die Bremsbeschleunigungen theoretisch sogar gleich, um noch einen vollgeladenen Li-Akku ins Feuer zu werfen bei einem strahlenden Osterapriltag. Aber der TO scheint wech zu sein, entweder weil er schon genug Lösung hat oder der umweltfreundiche Virus hat ganze Arbeit geleistet.
Jemand schrieb: > Fpgakuechle K. schrieb: >> Ich wünsch dir einen Eingebungsvollen Osterspaziergang bei Sonnigen >> Wetter der Deine verdorrte Fähigkeit zur Selbsterkenntniss aufblühen >> lässt und hoffe das dann solche irrigen Behauptungen wie "Alle bremsen >> gleich" unterbleiben. Sonst müsste man ernstahft daran gehen einen >> Paragraphen wegen "Volksverdummung" zu einzuführen ;-) > > Daß Dich meine in der Praxis absolut gebräuchliche Vereinfachung Nein, das ist keine Vereinfachung sondern eine Realitätsverhöhnende Modellverstümmelung. Und es ist auch nicht in der Fahrschule üblich, das man den Fahrschülern erzählt, der Anhalteweg wäre für alle gleich. Im Gegenteil, dort wird immer darauf hingewiesen welchen Einfluss beispielsweise Reifen und deren Zustand haben. Oder der der Bremsscheiben/-beläge. https://www.bussgeldkatalog.org/anhalteweg/#was_beeinflusst_den_anhalteweg > der Fassung bringt, daß Du sogar über ein eigenes Gesetz für Dich > nachdenkst, tut mir wirklich leid, aber das konnte ich ja nicht ahnen. Naja da steht nicht ohne Grund ein Smiley ... aber davon lässt sich ein Zyniker beim Abfertigen seiner Replik nicht abhalten. > Ich habe nunmal diese dumme Angewohnheit, meine Mitmenschen für > intelligente, vernunftbegabte und geistig gesunde Wesen zu halten. Bitte > entschuldige, daß ich da in Deinem Falle so falsch gelegen habe, das > wird mir hoffentlich nicht nochmal passieren. Ja klar es sind immer die anderen die einen Arzt nötig haben und man selbst ein strahlendes Beispiel für Mitgefühl und Nächstenliebe. Und darauf kann man immer herrlich 'herumreiten', wenn einem die Sachargumente komplett ausgegangen sind. https://de.wikipedia.org/wiki/Argumentum_ad_hominem > Nun, Du wirst meine freundliche Bitte um Verzeihung nicht ohne > neuerliche Pöbeleien stehen lassen können. Es sind keine Pöbeleien, es sind nachdrückliche Hinweise auf die fatalen Fehler in der Argumentation. Eine freundliche Bitte um Verzeihung ist in Deinen Ausführungen auch nicht erkennbar, sondern hinterfotzige Bemerkungen zur geistigen Gesundheit und Intelligenz.
Fpgakuechle K. schrieb: > Offensichtlich aus Allgemeinbildung: Die Tabelle ist ja witzig. Motorrad steht nach 25 Metern? Dass ich nicht lache. Aber kein neues. Ich stehe mit meinen beiden Moppeds nach wenigen Metern. Wenn ich richtig in die Eisen muss, dann schiebt mich garantiert ein Auto von hinten weg. Alles ist heute viel besser als beim Auto. Die Reifen kleben nahezu an der Straße und die brachialen Scheibenbremsen heute, die bremsen besser als so mancher Sportwagen mit Keramik Scheiben.
F. F. schrieb: > Ich stehe mit meinen beiden Moppeds nach wenigen Metern. Wieviel sind "wenige" als Zahlenwert ausgedrückt?
F. F. schrieb: > Fpgakuechle K. schrieb: >> Offensichtlich aus Allgemeinbildung: > > Die Tabelle ist ja witzig. Motorrad steht nach 25 Metern? Dass ich nicht > lache. Aber kein neues. Ich stehe mit meinen beiden Moppeds nach wenigen > Metern. Genau das ist das Problem, die Bremsverzögerung ist stark verschieden. Das hängt nicht nur vom Fahrzeughersteller ab (Koreaner bauen für den deutschen/europäischen Markt (no speedlimit) stärkere Bremsen in die Serie als für den amerikanischen, der sich spät von der Trommelbremse löste) sondern auch vom Zustand der Technik (Reifen-typ, -druck, -temperatur, (Rest)-Profiltiefe, Verschleiss Bremsbacken, Zustand Bremsscheibe). Das kann auch kein ABS komplett ausregeln - sobald der ausgeleierte Chinalappen auf der Felge hinten rechts ans Durchdrehen kommt, muss die Bremskraft reduziert werden. Deshalb gibt es ja das grosse Intervall von 7,5 - 9,0 m/s*s an Bremskraft. Oder mal ins Protokoll von Bremsenprüfstand schauen. Oder mal mit mehreren wagen ein Fahrsicherheitstraining machen und staunen welche unterschiedliche Bremswege zwischen den Wägen da auftreten. Dieter D. schrieb: > Fpgakuechle K. schrieb: >> unterschiedliche Fahrzeuge haben unterschiedliche Bremswege > > Die Graphik mit dem unterschiedlichen Bremsweg ist so auch nicht > korrekt. Mit ABS sind die Bremswege von PKW und LKW gleich. Doch die Graphik ist korrekt, weil sie den tatsächlichen Messwerten entspricht. Ein ABS regelt die Unterschiede zwischen den Reifen eines Fahrzeuges aus, aber nicht die zwischen unterschiedlichen Fahrzeugen. Sieht man auch gut am Einfluß der Profiltiefe auf die Bremsstrecke bei Näße: 8 mm Profiltiefe: 35 - 40 m 5 mm Profiltiefe: 55 - 60 m 3 mm Profiltiefe: 65 - 70 m 1,6 mm Profiltiefe: 120 - 125 m. (aus https://www.motor-talk.de/forum/bericht-vom-fahrsicherheitstraining-mit-a5-t1909151.html) Also selbst bei TÜV-gerechter Profiltiefe schon mal 25m Unterschied bei 3mm weniger Profil (mit dem selben Fahrzeug).
Dieter D. schrieb: > Wenn jedes Fahrzeug eine Vollbremsung mit einem > gleichwertigen ABS hinlegt, wären die Bremsbeschleunigungen > theoretisch sogar gleich, Selbst wenn man gleichwertiges ABS so versteht, daß damit auch gleichwertiger Reifen-, Fahrwerks- und Bremsenzustand sowie gleichwertiger Fahrbahnbelag gemeint wäre, reicht das noch nicht für identische Verzögerungen, da müßte zumindest auch noch die Masse(verteilung) identisch sein. Nebenbei ist eine ABS-unterstützte Bremsung ohnehin nicht mit der Vorgabe von jeweils gleichförmig verzögerten Fahrzeugen vereinbar.
Dieter D. schrieb: > Wenn jedes Fahrzeug eine Vollbremsung mit einem gleichwertigen ABS > hinlegt, wären die Bremsbeschleunigungen theoretisch sogar gleich, Sei bloß vorsichtig, sonst kommt der Verteidiger der verhöhnten Realität... Aber mal unter uns: nein, Antiblockiersysteme können die unterschiedlichen Dynamiken beim Bremsen nicht nivellieren, dazu gibt es viel zu viele Einflußgrößen. Letztlich geht es beim Beschleunigen (zumindest aus dem Stand), Bremsen, und selbstverständlich auch beim Kurvenfahren primär um den Reibungskoeffizienten zwischen Straße und Reifen. Diese Reibungsveranstaltung unterliegt allerdings praktisch diversen... Einflußgrößen. Und dann kommen noch weitere hinzu, die, nunja, manchmal etwas... speziell sind. Die meisten Einflußgrößen wurden hier schon genannt: Zustände von Bremssystem, Bereifung, Fahrbahn... Und dann ist da noch etwas, das der Fachmann unter dem Begriff "dynamische Achslastverlagerung" kennt. Diese dynamische Achslastverlagerung vermutlich jeder, der einmal ein Fahrzeug bewegt hat: beim Beschleunigen senkt sich das Heck des Fahrzeugs, die Front hebt sich. Beim Bremsen ist das umgekehrt: das Fahrzeug nickt, also: das Heck hebt sich (wird entlastet) und die Vorderachse federt ein (wird belastet). Wegen dieser Dynamik und weiteren Faktoren, auf den wir gleich zu sprechen kommen -- wir reden noch von einer geraden Bremsung -- sind die Bremskräfte bei einem Fahrzeug üblicherweise unterschiedlich verteilt: ca. 60 bis 80 Prozent wirken auf die Vorderachse -- nicht zuletzt auch abhängig von der Länge des Radstandes und dem Gewichtsschwerpunkt des Fahrzeuges. Weitere Faktor sind die Beschaffenheit des Untergrundes, der Schlupf, die Reifenbreite und der so genannte Latsch -- bzw. die Aufstandsfläche. Fangen wir spaßeshalber mal mit dem Untergrund an. Nun, verschiedene Untergründe haben unterschiedliche Reibungskoeffizienten. Das kennt jeder Autofahrer: im Nassen, auf Schnee, auf Eis ist es rutschig. Aber das ist ja nicht alles: Asphalt kann je nach Beschaffenheit wehr unterschiedlich sein, Beton ist (meistens) fast genauso gut, Verbundsteine sind nicht so der Hit und Kopfsteinpflaster ist eher... mau. Bei losen Untergründen wie Schnee, Schotter, oder Sand ist ein Antiblockiersystem sogar kontraproduktiv! Bei losen Untergründen schiebt der bremsende Reifen den Untergrund nämlich zusammen, und der vor dem Reifen aufgebaute "Wulst" des Untergrundes bildet eine "Barriere", welche die Reifen erst einmal -- gegen die Schwerkraft -- überwinden müßten -- was allerdings schwierig ist, weil das statische und dynamische Gewicht des Fahrzeuges darauf wirkt. Kommen wir zum Schlupf, also: zur Geschwindigkeitsdifferenz zwischen der Drehzahl des Reifenumfangs und dem Untergrund, oder: dem Durchdrehen beim Beschleunigen oder dem Blockieren beim Bremsen. In Motorsportkreisen (naja, ich habe nur eine internationale D-Lizenz) gilt beim Beschleunigen und Bremsen ein Schlupf von ca. 12 bis 18 Prozent als ideal für die Kraftübertragung. Dann kommen wir mal zur Aufstandsfläche... also, moderne Reifen sind ja meist aus elastischen Stoffen aufgebaut. Das heißt: wenn ein Fahrzeug (mit einer Masse) auf denselben steht, wird die Aufstandsfläche ein bisschen... "plattgedrückt", und je größer die dadurch erzeugte Aufstandsfläche ist, desto mehr Kraft kann sie linear übertragen -- und zwar zunächst nur für den linearen Fall, nicht in dem Fall, daß auch noch Seitenführungskräfte übertragen werden müssen. Für handelsübliche Mathematiker sind diese Aufstandsflächen minimal klein, weil der Reifen eine Idealform hat. Blöd nur, daß die Praxis ganz anders aussieht: da spielen auch die Reifenbreite und der Reifendruck eine signifikante Rolle. Jeder Rennfahrer weiß, daß weniger Reifendruck die Beschleunigungs- und Bremswirkung verbessert, während ein höherer Reifendruck die Seitenführung verbessert. Im Verbund mit dem zuvor gesagten heißt das, daß die tatsächliche Bremswirkung hochgradig individuell und von vielen Faktoren abhängig ist. Naja, Küchle kann das mit seinen FPGAs bestimmt alles total sauber und, für jedweden Fahrzeugtyp und jedwedes Fahrzeug berechnen. Wie dem auch sei: handelsübliche Straßenreifen erreichen meistens maximal etwa 0,8g. Aktuelle Rennreifen in der Formel 1 können dagegen über 5, Hersteller von Bremsen behaupten sogar über 6g schaffen...
Sheeva P. schrieb: > Dieter D. schrieb: >> Wenn jedes Fahrzeug eine Vollbremsung mit einem gleichwertigen ABS >> hinlegt, wären die Bremsbeschleunigungen theoretisch sogar gleich, > > Sei bloß vorsichtig, sonst kommt der Verteidiger der verhöhnten > Realität... Der ist schon lange da. > Im Verbund mit dem zuvor gesagten heißt das, daß die tatsächliche > Bremswirkung hochgradig individuell und von vielen Faktoren abhängig > ist. Naja, Küchle kann das mit seinen FPGAs bestimmt alles total sauber > und, für jedweden Fahrzeugtyp und jedwedes Fahrzeug berechnen. Naja, Sinn einer Rechnung ist es nicht, mit den vorhandenen Ressourcen, egal ob Kopfrechnen oder hardwarebeschleunigter Computer, irgendeine magische Zahl zu berechnen ( *Fourty-two!* ), sondern einen Ansatz zu wählen, der der Realität nahe kommt und am besten aus nachprüfbaren Messreihen stammt. Also sucht man sich beispielsweise die Ergebnisse der Sommerreifentest raus: https://www.autobild.de/artikel/sommerreifen-test-5629291.html berechnet daraus eine generalisierte Bremsbeschleunigung für den Reifentestwagen, adaptiert eine Alterung darauf (beispielsweise Zunahme Bremsstrecke nach 2 Jahren um 50%)und bastelt daraus eine Verteilungsfunktion aus denen man dann zufällig die Parameter für die Simulation wählt. Grob geschätzt kommt da auf ein Beschleunigungdelta zwischen a1 und a2 um und höher 2 m/s² im überwiegenden Teil der Bremsszenarien auf trockener Strasse. Das die Differenz nahezu 0 (und damit a1 = a2 gilt) ist, liegt bei grob geschätzt unter 10% (abgeschätzt aus einer Binomialverteilung). Bei nasser Strasse ist der dramatischer größer, siehe den Zusammenhang zwischen Profiltiefe und Bremsstrecke im vorhergehenden Post). Hat der Vordermann neues Profil und der dahinter normal abgefahrenes (3mm) muss der Abstand bei gleichzeitigen Bremsstart schon 30 m sein damit es nicht knallt. Es kommt also sehr häufig vor, das der Vordermann (ebenso die Hinterfrau) deutlich stärker oder schwächer bremst. Und darauf sollte man sich einstellen. Und nicht auf ein unrealistisches Szenario bei dem alle gleich bremsen. Da lässt sich vielleicht auf manche Weise die Rechenvorschrift dramatisch verkürzen, liefert aber unrealistsische Ergebnisse (0m abstand genügt bei gleichzeitigen Bremsstart) und führt so zu fatal-falschen Ratschlägen.
Joe G. schrieb: > Es wurde ja weiter oben schon mal angesprochen. Die Aufgabe kann sehr > einfach mit LTspice gelöst werden. Ich habe für das Beispiel die > Eingangsdaten von Yalu X. gewählt. :-) das notwendige I-Glied.asy und die Bibliotheksdatei Control.lib von http://www.amesys.de/ geladen .... trotzdem nörgelt Ltspice über "nur 3 Eingangswerte" an den Stromquellen ... habe ich etwas vergessen .. oder ältere Version ?! Sehe gerade keine Lösung ?!?! :-)
Du musst für die beiden Stromquellen I1 und I2 jeweiles noch die Parameter Trise und Ton eintragen. Ich habe mal 1n und 10s genommen. Evtl. hat Joe eine Version von LTspice, bei der diese Parameter automatisch mit passenden Defaultwerten belegt werden.
Eigentlich ist alles korrekt, aber hier mal meine Datei.
Yalu X. schrieb: > Evtl. hat Joe eine Version von LTspice, bei der diese Parameter > automatisch mit passenden Defaultwerten belegt werden. Ja, das kann sein... meine Version ist von 2018, habe lange kein Update mehr gemacht ;-)
Fpgakuechle K. schrieb: > Sheeva P. schrieb: >> Im Verbund mit dem zuvor gesagten heißt das, daß die tatsächliche >> Bremswirkung hochgradig individuell und von vielen Faktoren abhängig >> ist. Naja, Küchle kann das mit seinen FPGAs bestimmt alles total sauber >> und, für jedweden Fahrzeugtyp und jedwedes Fahrzeug berechnen. > > Naja, Sinn einer Rechnung ist es nicht, mit den vorhandenen Ressourcen, > egal ob Kopfrechnen oder hardwarebeschleunigter Computer, irgendeine > magische Zahl zu berechnen ( *Fourty-two!* ), sondern einen Ansatz zu > wählen, der der Realität nahe kommt und am besten aus nachprüfbaren > Messreihen stammt. Also bist Du jetzt derjenige, der bestimmt, wann und wie ein Modell vereinfacht werden darf und wann nicht? Seit wann?
Joe G. schrieb: > Yalu X. schrieb: >> Evtl. hat Joe eine Version von LTspice, bei der diese Parameter >> automatisch mit passenden Defaultwerten belegt werden. > > Ja, das kann sein... meine Version ist von 2018, habe lange kein Update > mehr gemacht ;-) ... ok jetzt nochmal ein Update durchgeführt .... scheinbar eine Datei angekratzt ;-) Alle Dateien in zip Datei zusammengefasst Jetzt funktioniert es ... Danke nochmal an Joe und Yalu :-)
Angehängte Dateien:
-

Schaltung.jpg
51 KB -

Bremsweg.jpg
110 KB
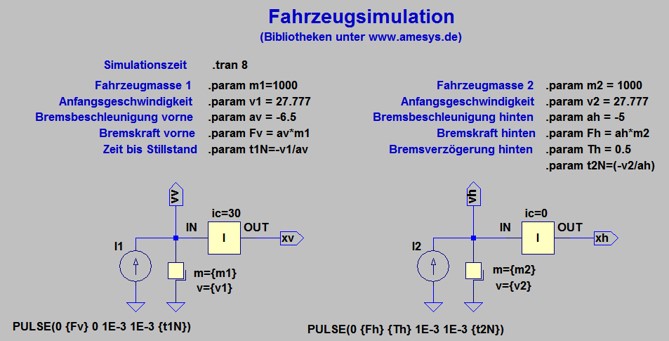
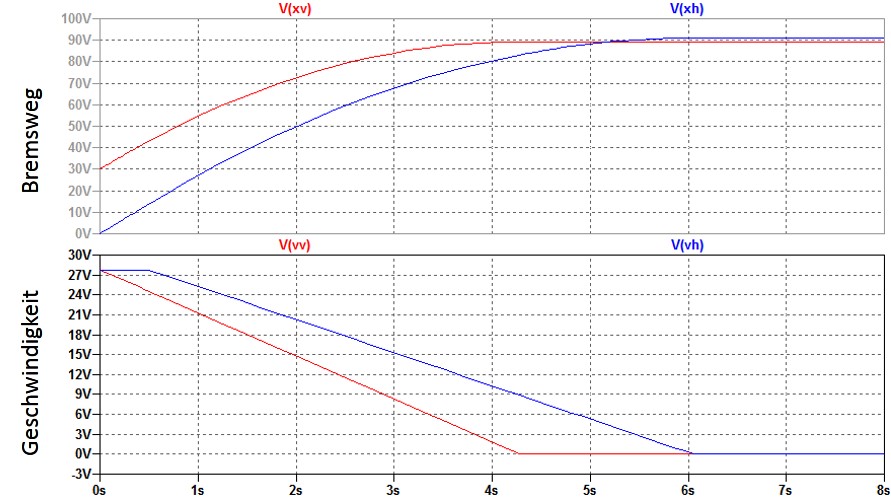
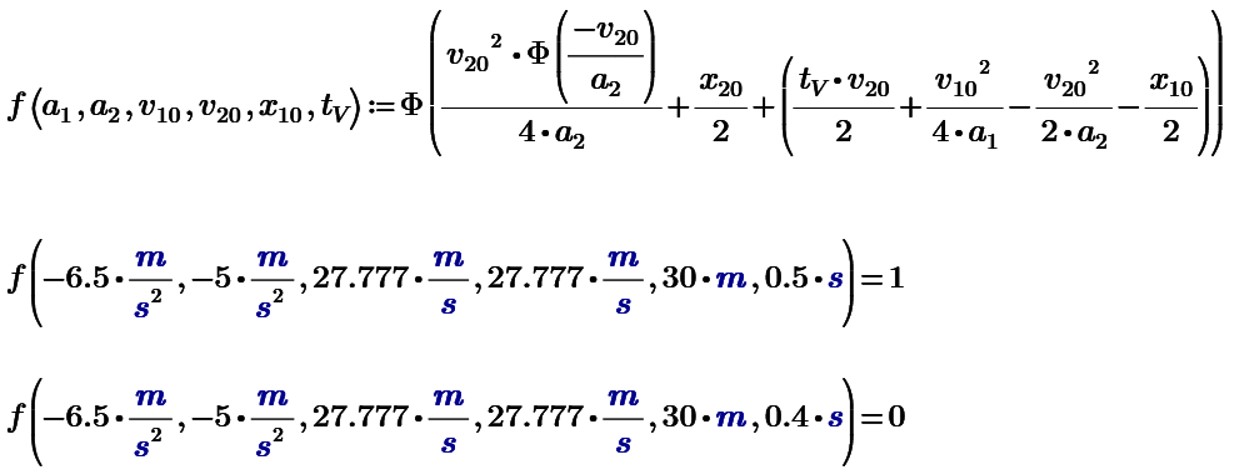
Für eine sinnvolle Simulation sollte die Bremsbeschleunigung beim Erreichen des Fahrzeugstillstandes auch noch auf null gesetzt werden (Fahrzeug rollt nicht zurück). In LTSpice ist es sehr einfach zu realisieren. Verwendet man konstante Verzögerungen, so läßt sich für die Aufgabe auch eine geschlossene mathematische Lösung finden, ohne die Numerik zu bemühen. Allerdings muss man sich für die einzelnen Intervalle der Heaviside-Funktion bedienen.
Schön, die Graphen zu sehen, nur will der TO aber eigentlich ja etwas anderes: Eine boolsche Funktion, die ihm angibt, ob es für einen bestimmten Parametersatz (d, v, t_reak, a_1, a_2) zum Crash kommt oder nicht.
LostInMusic schrieb: > Eine boolsche Funktion Wie kommst denn darauf? Der TO will ne Wahrscheinlichkeitsverteilung: Zitat: "Wie wahrscheinlich ist nun ein Aufprall?" Warum fällt mir da gleich der Klassiker von Bob Widlar bzgl 'digital' ein: https://theamphour.com/wp-content/uploads/2011/03/bob_widlar_digital1.jpg
und was Benjamin Nels schrieb: > verzögert Auto1 das Fahrzeug mit der > Beschleunigung a1. Auto2 verzögert nach einer Reaktionszeit von > 0.5Sekunden (T_Reak) ebenfalls mit a2. Wie wahrscheinlich ist nun ein > Aufprall? LostInMusic schrieb: > Eine boolsche Funktion, die ihm angibt, ob es für einen > bestimmten Parametersatz (d, v, t_reak, a_1, a_2) zum Crash kommt ... Schnittpunkt :-)
>Wie kommst denn darauf? Weil er später (Post vom 29.03.) schreibt: >>Ich wollte dazu die Gleichungen allg. aufstellen und als Input in meinem >>Modell dann die Kennlinie der Verzögerung des Fahrzeugs 1 eingeben und >>als Output erhalte ich eine Kollision oder nicht. Ist für mich eindeutig boolsch. >Der TO will ne Wahrscheinlichkeitsverteilung: >Zitat: "Wie wahrscheinlich ist nun ein Aufprall?" Das wäre erst mal zu klären, was er da genau will (Streuungen in den Input-Parametern?) und was die Frage nach "wie wahrscheinlich" überhaupt bedeuten soll.
Angehängte Dateien:
-

Kollision.jpg
64 KB
{kind=link}
{kind=link}
{kind=link}
{kind=link}
LostInMusic schrieb: > Eine boolsche Funktion, die ihm angibt, ob es für einen > bestimmten Parametersatz (d, v, t_reak, a_1, a_2) zum Crash kommt oder > nicht. Na das fällt einfach nebenbei ab, bitteschön :-) 1 wenn es zum Crash kommt 0 wenn nicht Ich habe im Bsp. die Verzögerung von 0.5s auf 0.4s verringert und schon schaffen es beide ohne Schaden ;-)
LostInMusic schrieb: > Das wäre erst mal zu klären, was er da genau will (Streuungen in den > Input-Parametern?) Na er will offensichtlich den realen verkehr modellieren, und da sind die Parameter Schrecksekunde, Bremsvermögen Fahrzeug zwar zufällig aber doch statistisch erfassbar verteilt. Und dann stellt sich die Frage für den Fahrer zwei wie er den Abstand wählen soll, so dass die Wahrscheinlichkeit für einen Zusammenprall möglichst nahe 0% ist unäbhängig ob Fahrer 1 gute oder schlechte Bremsen hat. https://www.unfallrekonstruktion.de/pdf/bdp_1998_german.pdf
Flagellum schrieb: > Na er will offensichtlich den realen verkehr modellieren,... Ich glaube nicht. Benjamin Nels schrieb: > im Rahmen einer kleinen Projektarbeit ... Aber wie dem auch sei, die Mathematik dazu liegt auf dem Tisch.
Joe G. schrieb: > Flagellum schrieb: >> Na er will offensichtlich den realen verkehr modellieren,... > > Ich glaube nicht. Was ist an der Aufgabenstellung unreal?
>Na das fällt einfach nebenbei ab
Geschlossene Formeln herzuleiten ist natürlich immer cool. Hoffentlich
liefert Deine aber auch das korrekte Ergebnis, wenn Auto 2 auf Auto 1
ungebremst auffährt, oder wenn es crasht, nachdem Auto 1 schon zum
Stillstand gekommen ist (ich habe es nicht überprüft). Diese beiden
Fälle sind ja ebenfalls realistisch.
An einer Funktion, die ihr Ergebnis durch Simulation des Vorgangs
berechnet, würde ich zu schätzen wissen, von dieser Problematik frei zu
sein. Sobald man es mit nicht-konstanten Beschleunigungen zu tun hat,
bleibt das ohnehin als einzige (sinnvolle) Alternative übrig.
Joe G. schrieb: > Ich habe im Bsp. die Verzögerung von 0.5s auf 0.4s verringert und schon > schaffen es beide ohne Schaden ;-) ... super :-) LostInMusic schrieb: > Sobald man es mit nicht-konstanten Beschleunigungen zu tun hat, ... dann kann Wahrscheinlichkeitsberechnung mit herangezogen werden probability und worst case http://ltwiki.org https://www.analog.com/en/technical-articles/ltspice-worst-case-circuit-analysis-with-minimal-simulations-runs.html sowie Noise für die ungleichmäßige Fahrwerte Scheibenbrems- Fahrbahn- Reibwert https://ez.analog.com/design-tools-and-calculators/f/q-a/111748/ltspice-signal-noise-simulation/333526#333526 :-)
>... dann kann Wahrscheinlichkeitsberechnung mit herangezogen werden
Ich meinte mit "nicht-konstanter Beschleunigung" keine um einen
Mittelwert variierende Beschleunigung um Statistik machen zu können,
sondern den Fall eines sich während der Bremsphase ändernden
Verzögerungswertes, d. h. man will statt mit a = const mit irgendeiner
Funktion a(t, x, v) rechnen. Der TO ließ in irgendeinem seiner Posts
Interesse an dieser Option anklingen. Es sind ja auch durchaus Szenarien
denkbar, wo eine solche Abhängigkeit tatsächlich der Wirklichkeit
entspricht, z. B. wenn der Bremsschlauch nach zwei Sekunden platzt (dann
a = a(t)) oder der Bremsweg durch eine Pfütze verläuft (dann a = a(x)).
Oder man stelle sich vor, jemand ist gemütlich mit 400 km/h unterwegs
und muss dann bremsen, weil unmittelbar vor ihm ein landendes
Spaceshuttle mit nur ca. 300 km/h aufsetzt und seinen Bremsfallschirm
abwirft. Wegen der geschwindigkeitsabhängigen Luftreibung wäre dann a =
a(v). Die Liste ist mit Sicherheit nicht komplett.
LostInMusic schrieb: > Wegen der geschwindigkeitsabhängigen Luftreibung wäre dann a = > a(v) Nichtlineare Reibung habe ich schon mittels zweier unterschiedlicher nichtlinearer Widerstände beschrieben [1], einfach benutzen. Ansonsten steht es dir frei in LTSpice eine "arbitrary behavioral current source" zu verwenden. [1] https://www.mikrocontroller.net/articles/Multi-Dom%C3%A4ne-Systeme
>Ansonsten steht es dir frei in LTSpice eine "arbitrary behavioral current >source" zu verwenden. Ja, natürlich, aber meine Aussage bezog sich doch auf etwas anderes: Man kann das Problem bei a(t, x, v) nicht mehr analytisch lösen. Es sei denn, die Abhängigkeit ist noch "genügend gutmütig", z. B. bei stückweiser Konstanz oder Linearität in t oder dergleichen, dann geht es immer noch (wie aufwändig es zu rechnen ist, steht auf einem anderen Blatt). Löst man die Aufgabe per Simulation, was immer geht, kann man dazu LTSpice verwenden oder jedes CAS, das numerische Integration beherrscht, oder man programmiert den Algorithmus selbst mit ein paar Zeilen in Python/Java/C/whatever. Ist eine Frage persönlicher Vorlieben. Einem Schüler würde ich das Selbstprogrammieren empfehlen zur Maximierung von Spaß und Lerneffekt.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.