hi, fuer einen 12volt motor moechte eine h-bruecke bauen, ersoll vor-rueckwaerts und mit variabler drehzahl fahren. |-----|---+12volt A.....C |.....| --MOT-- |.....| B.....D |-----|----0 volt ansteuerung ueber 4 separate uC ausgaenge frage : ist es ueblich,dass zB. B konstant durchgeschaltet wird und C gepulst (PWM)...motor dreht zB rechts. -aktiv bremsen: B bleibt durchgeschaltet und D wird gepulst. -stillstand: B und D angesteuert. -motor links : D durchgeschaltet und A gepulst von null bis hundert %...???? Parallel zu jedem mosfet darlington IGBT oder was auch immer sollte eine diode liegen ...dimensionierung? brauche ich Snubber in der stromversorgung? koennen wir mal alle wichtigen Punkte zu diesem Thema hier zusammenfassen....damit es nicht nur fuer mich nuetzlich ist? Danke ed
Hallo edi, an einer konkreten Dimmensionierung (mit Formeln) einer MOSFET H-Brücke bin ich auch interresiert ... Gruß Matthias
Bei einer H-Brücke muß der "obere" MOSFET mit >=11V höheren Spannung aufgesteuert werden wie der "untere".Schnell Dioden SB530 z.B.zum Ableiten der Induktionsspannung. Also entweder spezial IC von MAX und CO oder Stepupconverter.
Oder einfach die obere A + C durch ein kleines Relais ersetzen und die Fet's nur im unteren Zweig. Die FET's nur schalten, wenn die Relais schon angezogen sind, dann reicht auch ein kleines Relais.
Von SGS Thomson gibt es den L6203 im Multiwattgehäuse. Kann max. 48V und 4A und hat Thermoschutz. Mit zusätzlichen Shunt läßt sich auch Strombegrenzung aufbauen. Tschüß
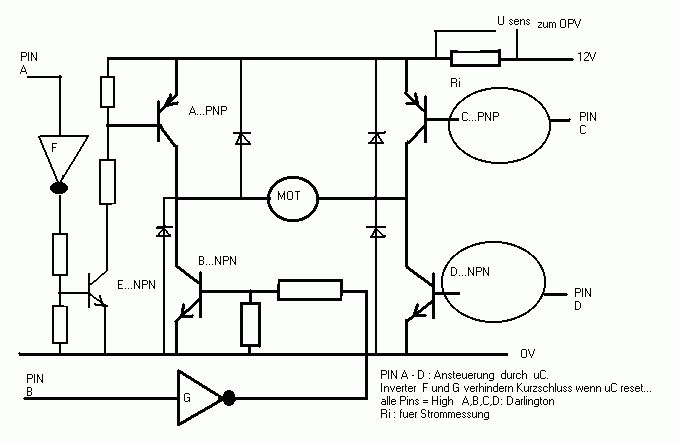
hi, High-Tech loesungen gibt es fertig zu kaufen...ich wollte eine einfache loesung finden und sie jedem zugaenglich machen. sollte mit dem,was in der bastelkiste liegt oder zumindest mit weniger als 5 euro machbar sein. wer lust hat,kann mitspielen....und vorschlaege bringen. ich habe bis jetzt noch nichts aufgebaut...werde es aber nach und nach tun...AAHHHH...mit Atmel 89C2051. AVR user bitte keine Steine werfen...es geht ja bestens auch damit. los geht's mit dem schaltplan den ich 'gezeichnet' habe. Werners vorschlag mit den relais kann mit PNP A und C geloest werden. Frankls andeutung bezueglich High-side ansteuerung ist ebenfalls durch den einsatz der PNPs+NPN kombination aufgehoben. machbar? ed
Hallo, ich würde auch vorschlagen, P- und N-Kanal MOSFET's zu benutzen, und diese über Transistoren zu steuern. Desweiteren würde ich eine Verriegelung über TTL-Gatter einbauen. >Von SGS Thomson gibt es den L6203 im Multiwattgehäuse. Kann max. 48V und 4A und hat Thermoschutz. Ich hatte so an 10..30A gedacht ... >mit Atmel 89C2051. AVR user bitte keine Steine werfen...es geht ja bestens auch damit. Womit das ganze angesteuert wird, ist doch relativ egal. mann kann sich doch einfach auf TTL-Pegel einigen. Gruß Matthias
hi freue mich dass dieses thema immer noch zieht.es wird ja immer viel darueber geredet....aber im detail weiss nicht jeder was da wirklich laeuft.schoen,wenn wir zuammen einen schritt weiter kommen koennten. der reihe nach schlaegt UWE P und N.fets von IRF vor, die ich allerdings anfangs nicht einsetzen wuerde.die sind so schnell (will nicht sagen kaputt),brauchen eine speziellere ansteuerung ....lieber mit gutmuetigeren darlingtons anfangen. MANFRED schlaegt zwei sehr schoene vorbildliche (perfekte!?) leistungsendstufen vor....wir wollen jedoch etwas kompletteres vielseitigeres mit der moeglichkeit alle ansteuerkombinationen auszutesten...darunter ist auch das Bremsen.... MATTHIAS mit dem power L6203 geht schon ueber das hinaus, was ich mit 'material aus der bastelkiste' bezeichne. nicht jeder kann so ein ding auftreiben....und ich habe noch nicht nach diesem teil gegoogelt. sicher ist,dass die eingaenge ttl/cmos pegel haben und somit gibt es keine uC-glaubenskriege.... um etwas konkreter zu werden schlage ich darlingtons vom typ bdx53 oder groesser tip121 falls man die noch in D-Land finden kann.(natuerlich mit ihren komplementaertypen) Die kleinsignaltransistoren NPN sind nicht kritisch. Schnelle dioden...Frankl schlaegt SB530 vor.... ich wuerde anfangs sogar mit 1 Ampere typen 1N4007 spielen. die inverter an den eingaengen koennen schmitt trigger sein oder jede invertierende gatterkombination ttl oder cmos. wie im schaltplan angegeben soll anfangs 12 volt stromversorgung benuetzt werden.Spaeter kann man leicht die spannung erhoehen und die ausgangsleistung maechtig steigern. Matthias hat eine menge guter punkte gebracht: ''verriegelung ueber ttl-gatter'' sicher hat er schon einmal einen 'kurzen' miterlebt und denkt deshalb an das ueberleben der bauteile. verriegelung ist gut....aber wer 'zuendet' sie? moeglich waere am ursprung der steuersignsle zu arbeiten,damit bestimmte ansteuerkombinationen nicht ''durchkommen'' und folglich eine sicherheit garantieren moeglich ist auch ,den aktuellen strom zu messen(an Ri..)und die bruecke zu 'schliessen',sobald der strom eine bestimmte einstellbare schwelle ueberschreitet.fuer schnelle bauteile ist diese loesung oft zu langsam! (deshalb auch anfangs der einsatz von gutmuetigen darlingtons) superschnell soll die bruecke anfangs auch nicht sein...das bedeutet ,dass die bauteilewahl unkritisch ist. es geht ja darum eine konkrete schaltung in den ''griff'' zu bekommen um sie dann danach an die jeweiligen beduerfnisse anpassen zu koennen. jetzt giesse ich meine tomaten...die groesste hatte heute 60mm durchmesser. ed
Hallo edi, >MANFRED schlaegt zwei sehr schoene vorbildliche (perfekte!?) >leistungsendstufen vor....wir wollen jedoch etwas >kompletteres vielseitigeres mit der moeglichkeit alle >ansteuerkombinationen auszutesten...darunter ist auch das >Bremsen.... Ja, ich möchte damit in der Lage sein, einen 4-Quadranten-Regler zu bauen ... >MATTHIAS mit dem power L6203 geht schon ueber das hinaus, >was ich mit 'material aus der bastelkiste' bezeichne. nicht >jeder kann so ein ding auftreiben....und ich habe noch nicht >nach diesem teil gegoogelt. Das war Harald's Vorschlag und nicht meiner. >Matthias hat eine menge guter punkte >gebracht: ''verriegelung ueber ttl-gatter'' sicher hat er >schon einmal einen 'kurzen' miterlebt und denkt deshalb an >das ueberleben der bauteile. Ja, ich habe schon einmal eine solche H-Brücke auf Lochraser entworfen. Damals habe ich auch Transistoren anstatt MOSFET's genommen ... Anstatt der 4 Schutz Dioden habe ich einen dicken Gleichrichter genommen, den ich ans Gehäuse schrauben kann (an die Wechselspannungsseite den Motor, und an die andere + und -). Ich muss den Schaltplan (Skizze) mal suchen. >moeglich waere am ursprung der steuersignsle zu >arbeiten,damit bestimmte ansteuerkombinationen >nicht ''durchkommen'' und folglich eine sicherheit >garantieren Ganau so habe ich es damals gemacht ... Nur wegen einem Ansteuerungsfehler, soll nicht die ganze Schaltung (evtl. sehr große und teure MOSFET's etc.) zerstört werden. Das ist mir persönlich schon ein 14 pol. IC wert. Desweiteren sollten wir das Messen der Drehzahl vorsehen, was zum regeln notwendig ist ... Nicht wirklich Drehzahl messen, sondern nur messen, um den Motor trotz Belastung (oder ext. antreiben) bei konstanter Drehzahl halten zu können ... Gruß Matthias
frage: warum das umständliche gepopel mit mosfets? ich mein genau genommen bildet man da doch umständlichst 'ne komplementär-ausgangsstufe mit zugehöriger treiberstufe nach. fehlt nich viel und man hat sich 'nen opamp selbst gebaut. toll. kunststück. und das auch noch 2 mal. möchte an der stelle mal fragen warum das sinn macht? (bin in analoger schaltungstechnik net so bewandert, bin mehr so der digitale.) in'nem andern thread ist ein leckerer power opamp mit 3A ausgang genannt worden (L165), und wie's der zufall will ist in den application examples prompt unter figure 9 'ne motoransteuerung an der ich beim besten willen nix zu mäkeln find. der opamp kostet um die 2euro und meiner meinung doch pflegeleichter (weil ein opamp und als solcher auch behandelbar, ohne sich gross um schnöde kennlinien zu scheren usw) als so'n getrödel mit diskreten bauteilen. und 3A ausgang is ja nu auch noch nich das ende der skala, sgs-thomson hält da auch noch für hungrigere motoren was bereit. http://213.203.244.47/mikrocontroller.net/attachments/31928/L%20165.pdf warum also unbedingt mosfets?
Hallo, weil man nur auf genau diese Weise etwas über Leistungsschalter und ihre speziellen Unterschiede in der Anwendung lernen kann! Mit koplexen IC's ist das nicht mehr so einfach möglich. Die setzen schon gute Kenntnisse in induktiver Schaltunstechnik vorraus.So sehe ich dieses Projekt. Für eine professionelle Anwendung hätte ich daher den Toshiba TB6549F/P vorgeschlagen. MfG Manfred Glahe
Hallo , hab vieeeele Stunden mit bauen u. messen an vervünftigen H-Brücken verbracht. Ergebnis: IR2104 - Mosfet-Treiber und 4 N-Fet's. Insbesondere wenns um das Ansteuern von Gleichstrom-Servomotoren geht sind die sehr gut. Betreibe diese mit ca. 25 kHz. Hab damit meine Servo-Regler aufgebaut , Spannung 60V Strom bis 30A. Schaut euch mal das Datenblatt an. Gruss Gerhard
@ Manfred: Hallo Manfred, das Toshiba IC TB6549/P macht ja einen sehr dankbaren Eindruck. Wer liefert das Teil denn? Gruß, Günter
Hallo Günter, den gibt es z.B. bei EBV Elektronik, 5.40 EUR unter 25 Stck. und 12 Wochen Lieferzeit. MfG Manfred Glahe
hi , hier gehts in die 3.runde freue mich ueber jeden konstruktiven beitrag und ueber kritik. Matthias ist dafuer,dass die bruecke moeglichst sicher arbeitet moeglicherweise idiotensicher eigensicher und ist bereit einen 14beiner zu investieren...finde ich richtig. genau so gut wie noetig ist die erfassung der drehzahl: es genuegt ja nicht einen motor zu speisen...er soll ja drehen, moeglichst konstant. Ripper (Jack the) hat das gepoepel mit bauteilen nicht gern und fragt sich warum das alles, wenn es doch den L165 gibt.....hast du auch gesehen,dass du dafuer + und - 18volt stromversorgung brauchst? wir wollen mit einer spannung fahren die beliebige werte annehmen kann ...je nach anwendung.! sich mit 3 ampere zufriedengeben ist nicht der sinn dieser schaltung..denn jeder kann seine bruecke fuer den optimalen strom dimensionieren. auch Manfred schlaegt einen japaner vor(TB6549) der aber in der werbung mehr kann als in wirklichkeit....diese integrierten teile sind einfach nicht universell genug. Gerhard hat schon alles gemacht 25 khz 30A,... 60 volt !und sieht sehr gut aus. aber so weit sind wir hier noch nicht. jetzt also zur ansteuerung bzw zur kontrolle der ansteuerung. die A und B bzw die C und D Transistoren sollen /duerfen nie gleichzeitig leitend sein,weil das nicht im sinne des erfinders der H-Bruecke ist. Eine moeglichkeit : steuersignale fuer A und B ( C und D) hinter den invertern , koennten jeweils ein NAND gate (CD4011)ansteuern und im fall eines fehlers (2*High) jeweils ein steuersignal pro halbbruecke wegschalten. es darf kein spike durchkommen ! sonst ist aller aufwand umsonst.Ich versuche heute abend mal sowas zu zeichnen und hier reinstellen. Da kommt sofort die frage auf: soll die bruecke bei einem solchen fehlverhalt gestoppt werden oder nur die stoerenden steuersignale ausgefiltert werden ?? der andere offene punkt,wo noch ideen noetig sind ist die drehzahlerfassung. auch hier gilt: einfachheit geht vor komplexe ICs. Frage: wieviele impulse pro umdrehung sind noetig,sinnvoll ? soll das abtasten magnetisch (Hall), photoelektrisch .... mit tachogenerator , analog? erfolgen. natuerlich muss nicht unbedingt mit einem geschlossenen regelkreis gearbeitet werden...da kann diese problematik wegfallen...die ja einiges an mechanik erfordert(speed-sensor) nochmals moechte ich sagen,dass die schaltung, die wir entwerfen wollen als grundlage fuer die verschiedensten anwendungen und leistungsstufen dienen soll....mit einfachen bauteilen aufgebaut. her mit ideen und wuenschen ,damit fuer jeden was drin ist! Ciao,jetzt sind meine tomaten dran ed
Hallo edi, so universal wie Du die Brücke planst gehts wohl nicht. Es muß zumindest nach Leistungsklasse unterschieden werden. Der Entwurf einer 1A Brücken und einer 10A Brücke unterscheidet sich doch sehr. Auf geringe Störstrahlung ist besonders zu achten und da unterscheiden sich beide eben und das nicht nur auf der entflechteten Platine. Ich sehe dieses Projekt als guten Einstieg in die induktive Schalttechnik und denke das man dabei viel lernen kann. Am Ende wird aber (nach reichlicher Erfahrung) für Standartlösungen im unteren Ampere Bereich immer ein fertiges IC benutzt werden. Die dafür "gewonnene" Zeit wird für andere Dinge sicher benötigt. Aus diesem Grund habe ich nach meinen diskreten Brücken auch den Treiber von Toshiba (es gibt noch weitere gute) noch genannt (dieser setzt aber das hier noch zu sammelnde Wissen teilweise vorraus). MfG Manfred Glahe
Holla Manfred, hast du mit dem TB6549 / P praktische Erfahrung sammeln können? Glückauf, Günter
Angehängte Dateien:
-

ha2_B.gif
9 KB
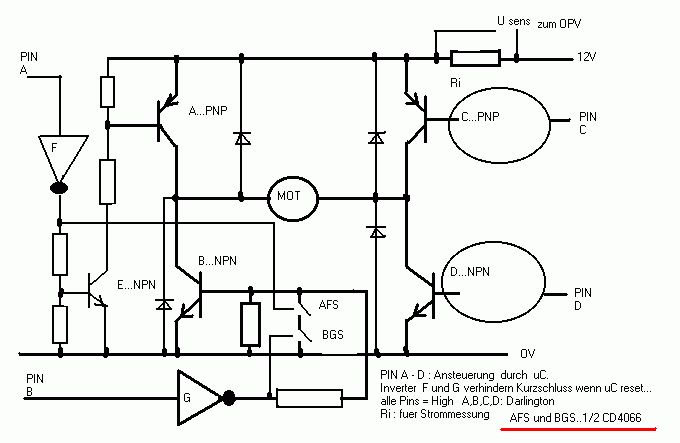
hi Manfred, 4. runde das,was ich unter universal verstehe ist die grundschaltung / konzept und die kann fuer 1 A oder 10 A gleich sein. es geht nicht um spinat und gurke sondern um aepfelchen und apfel....und ueber drahtstaerke oder kupferflaechen wurde bis jetzt noch nichts gesagt. ganz klar werden uns in der zukunft nur noch integrierte module zur verfuegung stehen....ich sehe eben hier noch eine moeglichkeit etwas 'selbst' zu machen...und das mit einfachen mitteln. deshalb habe ich meine 'zeichnung' etwas erweitert und moechte mal hoeren was dazu gesagt wird.es geht um die verriegelung der halbbruecken: mit 1/2 Quad-switch CD4066 kann ich die ansteuerung des B-transistors blockieren. Zwei schalter in reihe schliessen im 'notfall' die basis von transistor B . in diesem fall wird die bruecke nicht abgeschaltet und das wird wohl einen drehzahlverlust bringen. diese 'sicherung' sollte eigentlich nur beim 'experimentieren' wirklichen schutz bringen....wenn ein programm einmal laeuft,dann duerfte eine gleichzeitige ansteuerung der transistoren A+B bzw C+D...=Kurzschluss! ausgeschlossen sein. sollte eine abschaltung noetig sein, dann hilft ein flip-flop oder falls moeglich ein (int)Pin des uControllers. kommentare? ed
hi UWE, danke fuer deinen beitrag. der '4066' liegt bei etwa 90 ohm. verschiedene hersteller verschiedene daten.deshalb ist es vielleicht gut einen 'HC4066' zu waehlen. wo hast du die 1k2 info her? ich erinnere mich ,dass der 4016 (kompatibel) etwa 300ohm hat ...deshalb HC4066! ciao ed
Hallo Edi, die 4066 haben einen zu hohen RDon und treiben nur geringe Kapazitäten (was die Schaltzeit wesentlich erhöht), an der Stelle besser mit einem Bipolaren Transistor (mit UND Gatter ansteuern) nach Masse ziehen (UCE geht gegen 0). Der µP ist leider viel zu langsam um im Falle eines Fehlers (Kurzschluß, Anschlag usw.) über INT abzuschalten. Ich habe daher mit dem HC11 vor Jahren folgende Lösung entwickelt. Das Ansteuerungsmuster wird vom µP in ein Register geladen. Dieses Register steuert die Brücke. Im Fehlerfall wird ein externes Analogsignal generiert welches über einen Schmittrigger das Register löscht (das gleiche geschieht bei Power On oder Reset) und einen INT auslöst. Das Analogsignal wird nun vom µP eingelesen und die Amplitude festgestelt. Meine INT Rutine unterscheidet 8 Spannungen (und damit auch 8 verschiedene Servicerutinen). Schaltung im Anhang. @ Günter, mit dem IC noch nicht. Habe ich beim Stöbern entdeckt und mir vorgemerkt für die nächste Anwendung. MfG Manfred Glahe
hallo Manfred, von dir koennen wir einiges lernen (zumindest ich) auch von dir kommt die vermutung,die 'bilateral switches' seien zu hochohmig....schon mal getestet? mir macht die ' mickey mouse logic ' viel spass und habe somit ein unkonventionelles und-gatter gebaut.ich werde es mal ausprobieren ob die sache brauchbar ist.(aber wie du sagst...einkleiner transistor und ein und-gatter sind sicher OK ) deine meinung bezueglich 'bruecke abschalten' ist also fuer ein externes flip-flop unabhaengig vom uC. 'Nur' mit int,kommt man da bestimmt zu spaet...(rauch) das,was ich am schoensten finde ist die art und weise,wie du die einzelnen brueckenteile ansteuerst: mit einem bitmuster, das zyklisch ausgegeben wird...das macht die programmierung ganz einfach....zum testen kann man die wiederholfrequenz ganz einfach erhoehen. du sagst: im fehlerfall wird ein analogsignal erzeugt.... was fuer fehlerfaelle hattest du? falls ueberhaupt? Danke ed
Hallo Edi, ich habe sicherheitshalber noch mal beim HEF4066 (Valvo) nachgeschaut und die geben bei 15V 175 Ohm an. Wenn Du ihn allerdings nur mit 5V betreibst steigt der Widerstand schon auf 2,5K an. Probier den Unterschied doch einfach mal auf dem Steckbrett aus, lernen wird man immer dabei. Wer rechtzeitig mit unkonventionellen Lösungen umgehen kann, der hat einen Vorteil als Entwickler wenn es darum geht auf einer "fertigen" Platine noch ein vorhandenes Problem mit den "Rest Gattern" lösen zu müssen! Der Fehlerfall tritt bei Serienmaschinen z.B. als Kabelbruch der Anschlagschalter (Verfahrwege) auf. Die Stromüberwachung der Brücke würde das feststellen und ein Analogsignal mit einer für diesen Fall vorgesehenen Amplitude generieren. Bei komplexen Verfahrwegen ist es daher sinnvoll auch den Ort des Anschlagfehlers zu nennen. Die Amplitude des Analogsignales währe dann eine andere und die INT Rutine würde das mit einer anderen Sevicerutine bearbeiten (dem Ort des Fehlers eben angepaßt). Dieser Fehlerfall trat an meiner LPKF Fräse auf und war bei denen ohne eine solche Unterstützung schwer zu finden, daran habe ich über eine Woche gesucht. Es lohnt sich also vorraus zu Planen. Bei meinen eigenen Projekten (12 Positionen rotierende Insektenfalle im Wald) kam es durch Feuchtigkeit und Abrieb am Kollektor des treibenden Scheibenwischermotors zu einem Kurzschluß und die Brücke wurde einschließlich der halben Platine zerstört (war noch kein µP drin). Die Eigensicherheit einer Schaltung benötigt häufig mehr Aufwand als das zu lösende Problem selbst. Verlorene, nicht wiederzubringende Meßdaten rechtfertigen schon den Aufwand. MfG Manfred Glahe
Angehängte Dateien:
-

Immag.058.jpg
17 KB
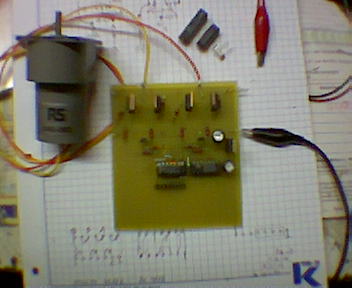
Hallo, hier gehts in die 5te runde! zuerst mal ein photo(mit meinem handy geschossen...)wo man die 4 TO-220 Darlingtons vom typ BDX53C (npn) und BDX54C (pnp) sehen kann. links der 12 volt getriebemotor (RS-440 082) in der mitte ein IC: HEF40106 (6 inverter)und rechts der quad-bilateral-switch HCF4066. weiter rechts ein 7805. die beiden npn transistoerchen fuer die ansteuerung der A und C transistoren : MPSA 05 . widerstaende sind 4k7 (von basis nach + oder - )und 2k2 fuer die ansteuerung der basis. habe alles ohne probleme auf anhieb zum laufen gebracht und natuerlich die schutzschaltung,die verhindern soll,dass eine halbbruecke ...'glueht'. es geht!...wenn auch die spannung an der basis des B-darlingtons bei etwa 0.8 volt liegt... ein normales transistoerchen ist da vielleicht doch etwas besser. auf die untere haelfte der platine werde ich den uC aufbauen obwohl die schaltung eigentlich schon komplett ist ...siehe pfostenverbinder...mitte unten ...da sind +/-5volt , die vier steuersignale plus zwei zusaetzliche pins . jetzt zu Manfreds interessantem beitrag. wir haben die H-Bruecke vor 'fehlzuendungen' geschuetzt...aber das reicht noch nicht! wenn der motor einen 'kurzen' macht dann 'glueht' es schon wieder....also gefahr von aussen!! um diese problematik zu loesen hatte ich in meine 'zeichnung' oben rechts einen 'shunt' widerstand eigebaut.der R-wert muss sehr klein sein,damit die motorspannung moeglichst nicht reduziert wird....je nach 'strom' 1 ohm, 0,1ohm ...0.025ohm die spannung, die an diesem widerstand abfaellt muss verstaerkt werden mit einern schaltung, die ich bald hier reinstellen werde.
Angehängte Dateien:
-

ha2_B.gif
9 KB
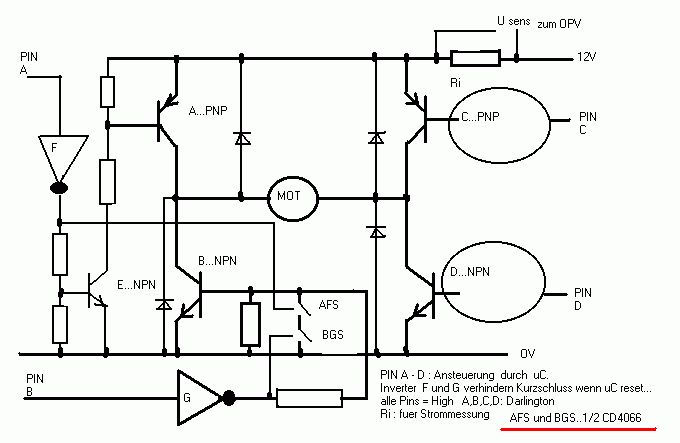
hier nochmal die schaltung...ha2_B.gif viel spass ed PS werde nachforschen wie hoch der Ron des 4066 bei 5volt ist. ....mit einem spannungsteiler...
hallo Bruecken-fans, habe endlich gecheckt wie gross effektiv das Ron meines HCF4066BE ist. die messanordnung ist denkbar einfach: 1k5 widerstand von +5volt an eine seite des ''schalters'' die andere an null. Spannungsabfall am schalter : 0.55V...das bedeutet nach adam riese ein Ron von etwa 185 ohm !!! dieser wert liegt auch im einklang mit der spannung, die ich in der schaltung messe (Ube)...etwa 0,7-0,8 volt. Papier ist geduldig und gibt evtl. worst case werte an... ..1k2 ist weit von 185 ohm entfernt. nach diesem ausflug in die quad bilateral switches schnell zurueck zur H_Bruecke: habe mir die situation am messwiderstand angeschaut.da der stromfluss bei PWM dauernd unterbrochen wird (abhaengig vom tastverhaeltnis) bekomme ich am messwiderstand ein impulsives signal,das wohl gefiltert werden muss...oder doch besser nicht, weil sonst die messung zu traege wird. wer hat da erfahrung? wer hat fragen ? wer hat festgestellt,dass ein motor bei 2% pwm noch nicht dreht? wer kann mit einer H-Bruecke 'musik' machen ?(*) viel spass mit der BRUECKE *ed
sieht aus wie bei einem schaltnetzteil...ich würde den messwiderstand unten einbauen, damit ich masse-bezogenes signal habe, dann ist dessen verstärkung viel leichter; natürlich müsste man das fehlersignal noch filtern, so ca. 100nF sind bei SNT schön üblich.... wenn ich mir das ganze noch einmal anschaue, komme ich nicht vom gedanken weg, dass man das ganze auch mit einem TL494 ansteuern kann; denn gibt es überall für 1-2EUR und hat schon ziemlich viel eingebaut: pwm, strom/spannung schutzschaltung, überlappungsschutz... ist ja nur ein gedanke... emil
Angehängte Dateien:
-

Immag.059.jpg
17 KB

{kind=link}
{kind=link}
{kind=link}
hallo Emil, du hast recht,dass der strommesswiderstand auch 'unten' eingebaut werden kann...aber bei 12volt kommt da ein OPV in differenzverstaerkerkonfiguration noch mit.bei hoeheren spannungen (und folglich hoeheren leistungen) kann man andere messvorrichtungen einsetzen. ob man den tl494 einsetzen steht nicht zur diskussion..... man koennte auch ein eprom mit 'bitmustern' einsetzen und mit einem zaehler die speicherplaetze ansprechen.... mit einem mikrokontroller sind kaum grenzen gesetzt...je geschickter der programmierer.... ich habe jetzt ein simples prograemmchen gemacht und getestet...ach ja,ich spiele mit AT89C2051: mit einer taste waechst die geschwindigkeit mit der zweiten kann man sie verringern... zb einen ventilator auf die gewuenschte luftmenge einstellen.. sollte das programm jemanden interessieren stelle ich es hier rein. ed
Hallo Brücken-freaks, hab nochmal das Bild von meiner Servomotorsteuerung angehängt. Jetzt sind nähmlich große Probleme damit aufgetreten und ich bitte euch um eure Tipps. Hab die Brüche bisher mit 38V ohne Probleme betrieben ( Strom bis 15A begrenzt). Um noch mehr Leistung rauszuholen hab ich dann eine andere Stromversorgung mit 60V (Strombegrenzung ebenfalls 15A) gebastelt. Nach dem Einschalten und Anpassen des PID-Reglers "EXPLODIERTEN" die Fet's. Also keine Überhitzung sondern die wurden regelrecht gesprengt ! Ein IRF540 müsste doch 100V und 27A vertragen. Bitte um Eure Tipps um das in den Griff zu bekommen. Gruss Gerhard
Hallo Gerhard, Deine Brücke enthält keinerlei Schutzbeschaltung und ist daher komplett abhängig von der Strombegrenzung des Netzteiles. Wie schnell spricht die an? Befinden sich noch Stützkondensatoren nach dieser Begrenzung? Der Pulsspitzenstrom wird kurzzeitig schnell überschritten in solch einer Schaltung! Wie hoch sind die Spannungsrückschläge des Motors und welchen Type verwendest Du? Probier einfach mal aus ob die ganze Anordnung mit einer Glühbirne (ohmscher Widerstand) gut arbeitet. Die eingesetzten Halbleiter sind zwar ausreichend dimensioniert müssen aber vor solchen Bedingungen noch extra geschützt werden. PS: Am Anfang dieses Themas wurde mal gesagt (ich weiß nicht mehr von wem) eine "universelle Brücke für kleinste bis große Leistung" sei zu fordern. Jetzt ist der Unterschied deutlich geworden! MfG Manfred Glahe
Hallo Manfred , Danke vorerst für deinen Beitrag. Die Schaltung ist nicht ganz aktuell. Stromüberwachung erfolgt über Shunt und LM358 direkt zwischen Source der unteren Fet's und Masse. Hatte beim "Knall" die Begrenzung auf ca. 8A eingestellt. Übrigens: Die Fet's werden mit ca.20 kHz getaktet. (geschlossener Regelkreis mit Rückmeldung der Position mittels Drehencoder an den AVR , welcher die PWM generiert) Und geknallt hats als ich die PID Anteile auf scharf trimmte, also der Servomotor ins "Schwingen" kam. Ich vermute auch dass es an den Spannungsrückschlägen des Motors liegt. Abhilfe: ?????? Fet's für höhere Spannungen ???? externe Dioden an jeden Fet ??? oder gibts sonst noch ne Patentlösung Gruss Gerhard
Hallo Gerhard, "Stromüberwachung erfolgt über Shunt und LM358 direkt zwischen Source der unteren Fet's und Masse." Gut. Aber wie (und vor allem wie schnell) teilst Du dem µP mit daß er abschalten soll und wie schnell tut e's dann (ich denke das geht nur extern schnell genug). Am besten die neue Schaltung anhängen. Mach doch mal den Test mit einem ohmschen Widerstand und melde Dich dann wieder. MfG Manfred Glahe
@Gerhard, PS: externe Dioden helfen da nicht und eine Patentlösung kenne ich auch nicht, aber mir fällt gerade noch ein: Miß doch mal die Zeiten zwischen Gate und Drain Aktionen. Es muß sichergestellt sein, daß genügend große Lücken (µS Bereich) zwischen dem Wechsel der Brücke (Richtungswechsel) liegen um dem Motor Zeit zu geben sein Potential abzubauen. MfG Manfred Glahe
Hi Manfred , Test mit ohmscher Last geht nicht hab da keine Rückmeldung an den AVR. (geschlossener Regelkreis !!) Die Abschaltung teil ich nicht dem AVR mit sondern den beiden IR2104 am SD Eingang. (Also die die Verbindung vom AVR zu den beiden IR2104 wie im Schaltplan dargestellt gibts nicht mehr) Die Frage die ich mir stelle ist: >> Warum ging das ganze mit den 38V problemlos. >> Selbe Umschaltzeiten bei höherem Strom durch die Fet's(bis 20A) >> Dabei keine Anzeichen dass etwas nicht in Ordnung sei. >> Auch keine übermäßige Wärmeentwicklung an den Fet's. >> Funzte auch mit 60V Fet's einwandfrei. Werd wohl weiter testen müssen , und wenn möglich nicht zu viele Bauteile verbraten. Gruss Gerhard
Hallo Gerhard, "> Warum ging das ganze mit den 38V problemlos." das hängt mit der endlichen Spannungsanstiegsgeschwindigkeit der Strecke zusammen. Es muß in der gleichen Zeit (mit den gleichen Schaltgeschwindigkeiten für Schalter und Transistoren) eine fast doppelt so hohe Spannung beim EIN/AUS Schalten erreicht werden! Laß den Motor nur mal in eine Richtung laufen (Regelstrecke unterbrechen) und schau nach was passiert. Wenns da geht die Totzeit zwischen einer aktiven Brückenumkehr vergrößern. Testweise auch mal ein RC Paß in Reihe über den Motor legen (max. 10nF/100R). Aber in jedem Fall die Spannungen Oszillographierern sonst tapps Du im Dunkeln. Viel Spaß beim Suchen! MfG Manfred Glahe
Hallo Manfred, danke für deine Tipps. Die Brückensteuerung hab ich nicht selbst erfunden sondern von einer handelsüblichen Servomotorsteuerung (Geckodrive) nachgebaut. Die geben bis 80V und 20A an. (ebenfalls mit 20kHz getaktet) Bin gespannt was passiert wenn ich den mit 60V speise. Trau mich aber nicht. Für mich als Hobbyelektroniker wird's eine schwere Aufgabe das in den Griff zu bekommen, aber wir werden sehen. Gruss Gerhard
Und wenn der motor in bremsbereich ist, wie besorgt du das die spannung nicht über die grenzen geht. Hast du eine bremswiederstand, oder genug uF im stromversorgung um das energie zu speichern ohne das die spannung zu hoch wird? Oder besser eine batterie, es halt eine stabile spannung eben wenn du viel energie zurückspeisen. Man kann es nicht so gut vorstellen wenn deine schema nicht aktuell ist. Kann keine strommessung darin sehen.
Hallo Leute, Sorry, dass ich diesen alten thread wieder Ausgrabe, bzw. Google diesen für mich ausgegraben hat... Bin neu hier und möchte mal meinen allerersten mit EAGLE gezeichneten Schaltplan zum Besten geben. (Ich kann wirklich nur empfehlen, sich mal einen Tag, bzw. so. ca. 4 bis 20 Stunden intensiv damit auseinanderzusetzen, denn danach wird man nie wieder mit Grafikprogrammen seine schaltpläe zeichnen wollen). EAGLE ist ja für alles, was der Hobbybastler so braucht kostenlos. Die Widerstände R1-R3 kann man auf bis zu 100 Ohm (oder noch drunter) runterschrauben, je nach Betriebsspannung und daraus resultierendem gewünschten Steuerstrom für die Transistoren im Leistungsteil. (Wenn man da ganz billige Möhren nimmt, brauchen die u.U. 50-100 mA Steuerstrom). Bei so niedrigen Vorwiderständen ist zu beachten, dass die NPN-Transistoren im Leistungsteil (hinter R1 und R2) dort direkt dranhängen! 1 kOhm wäre sicher eine gute Wahl, wenn die Stromaufnahme der H-Brücke nicht so wichtig ist (statt 10kOhm wie eingezeichnet). Die Schaltung wie vorliegend ist für Ströme bis max. ca. 0,5 ... 1A (je nach verwendeten Transistoren, BC546+556 sind z.B. auch denkbar) konzipiert und soll außerdem selbst möglichst wenig Strom aufnehmen, Daher 10kOhm für R1-R4. Bei sehr hohen PWM-Frequenzen oder falls ohne Pause die Richtung gewechselt werden soll (was grober Unfug wäre und softwareseitig unterbunden werden sollte), könnte es nötig werden die Baisi der NPN-Transistoren an Masse und die der PNP-Transistoren an Ub zu legen, jeweils über 100kOhm, evtl. auch 10 kOhm bei exrem hohen Frequenzen, über 100 khz, dann sollten R1-R4 aber nicht über 1kOhm haben. Alle Werte natürlich nur geschätzt. Diese Schaltung verhindert einen Kurzschluss, wenn beie richtungen gleichzeitig aktiviert werden. Noch besser: dieser Fall ist expliziet vorgesehen und schaltet beide PNP-transistoren durch, d.h. es kann so der Motor kurzgeschlossen und dadurch gebremst werden. Die vom Motor induzierte Spannung fließt nicht zurück in die Versorgungsspannung der Schaltung. Wenn beide Steuerleitungen absolut Syncron gepulst werden, kann sogar die Bremswirkung variiert werden. Wenn am DISABLE-Eingang ein High liegt, wird der Motor abgeschaltet. Dies lässt sich z.B. dafür nutzen, um eine (dann allerdings invertiertes) PWM-Signal auf den Disable-Anschluß zu geben, während DIR_1 und DIR_2 fest auf die gewünschte Richtung eingestellt sind. Mittels eines 4094 kann man so 4 Motoren bedienen und dennoch separat in der Geschwindigkeit regeln. Der Zustand "Bremsen" lässt sich über den Disable-Pin jedoch nicht abstellen, für verschiedene Bremsstärken müssen also DIR_1 und DIR_2 gemeinsam gepulst werden, was über einen 4094 doch ziemlich viele Taktzyklen erfordert und den uC an den Anschlag bringen dürfte. Mann kann aber über den OE-Pin des 4094 das "Bremssignal" pulsen, dann aber nur für alle Motoren gemeinsam. Vielleicht werde ich die Schaltung mal so abwandeln, dass das Disable auch für das Bremsen gilt. (Mit je 2 Dioden + 1 Pull-Down an Q1 und Q2 wäre die Sache erledigt) Die Freilaufdiode 1N4004 sollte man Vermutlich bis max. 1khz PWM-frequenz einsetzen (ich kenne deren Grenzfrequenz nicht), es empfiehlt sich der Einsatz einer schnellen Schottky-Diode) Ich bitte zu verzeihen, wenn die Schaltung evtl. eigenartige Bauteile verwendet, aber das ist meine Erstlingswerk mit EAGLE. :-) Außerdem habe ich die Schaltung noch nicht getestet, sondern mir vorhin frisch ausgedacht und erst danach gegooglet und bin dann hier gelandet und dachte, ihr könnt da vielleicht was mit anfangen. Als Mikrocontroller würde ich ich einen der TI MSP430-Serie (von Texas Instruments) oder z.B. einen Atmel ATMEGA (z.B. ATMEGA8L-8) empfehlen. Bei der Anzahl Bauteile wird einem allerdings spätestens schlecht, wenn man damit 8 oder 10 Motoren steuern möchte und man möchte doch wirklich einfach ein fertiges IC benutzen, zumindest, wenn man im Bereich um nur 1 Ampere bleibt... :-) (jetzt schon 28, mit "Disable" auch für Bremsfunktion sogar 34 Bauteile --- wer möchte das 10x von Hand zusammenbauen...?)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.