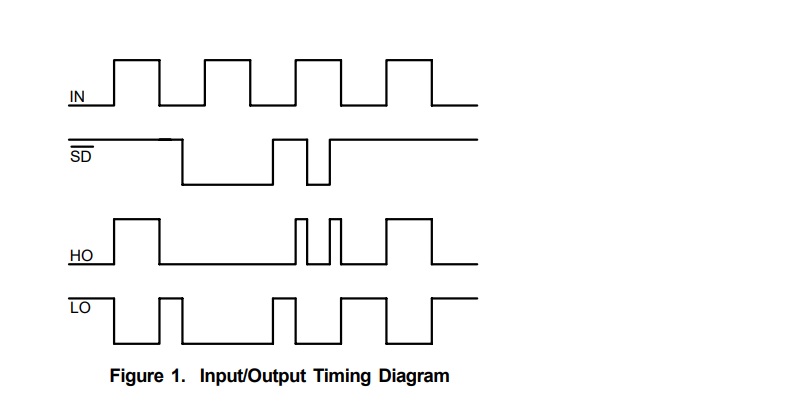
Ich versuche gerade den IR2104S zu verstehen und frage mich wie das mit der Ansteuerung von 3 Halbbrücken funktionieren soll ohne einen Kurzschluss zu erzeugen. Entweder ich werde aus dem Chip einfach nicht schlau oder die Schaltung ist fehlerhaft. Das Datenblatt zeigt das obige Bild. Daran erkennt man wie der Chip funktioniert und weclher FET wie durchgeschaltet wird. Gemäss "Brushless-Controller für Modellbaumotoren" auf mikrocontroller.net https://www.mikrocontroller.net/articles/Brushless-Controller_f%C3%BCr_Modellbaumotoren gibt man eine PWM auf IN und steuert den SD Pin normal. Die Ansteuerung des Motors aber benötigt zum einen die Kommutierung selbst und zum anderen eine PWM auf eine der beiden durchgeschalteten FETs. Es dürfen nicht beide FETs gleichzeitig aktiv sein sondern immer nur 2 FETS verschiedener Halbbrücken zB High side FET der 1. Halbbrücke und Low Side FET der 3. Halbbrücke. So wie das aber beschaltet ist (PWM auf IN und SD keine PWM) ist die Ansteuerung ja viel komplizierter. So muss ich ja auch immer irgendwie erkennen, wann die PWM losläuft und wann gerade high oder low ist um SD entsprechend einzustellen. Das müsste ja gerade anders rum sein, mit IN entweder high oder low, je nachdem welcher FET aktiv sein soll und PWM auf SD geben. Fertig. In Beispiel oben wäre das also für FET 1 und 6 (High side FET 1. Halbbrücke und low side FET der 3. Halbbrücke). Treiber für 1. Halbbrücke IN high SD PWM Treiber für 3. Halbbrücke IN low SD high Klärt mich bitte auf, wenn ich falsch gedacht habe.
Angehängte Dateien:
-

verlauf.jpg
27 KB
> Es dürfen nicht beide FETs gleichzeitig aktiv sein
Wo siehst du in dem Diagram, dass beide FETs an sind? Der Treiber ist
extra so designed, dass es nicht möglich ist, beide FETs gleichzeitig
einzuschaltet - hat gar extra dead-time-pipapo drin.
Da bestehen gleich mehrere Mißverständnisse.
Der Pin / das Kürzel SD steht für Shutdown ...
und nicht für einen zweiten_PWM_Eingang.
("Shutdown" sollte selbsterklärend sein? Falls
nicht: Der ist zur Stillegung (und zwar low) der
Ausgänge (und damit Abschalten beider Schalter
daran) im_Fehlerfalle - bei z.B. Überstrom(*).
(Dessen Erkennung muß also separat geschehen -
Shutdown ist dann nur dazu da, von der genannten
Erkennungsschaltung (einfachster Fall wäre ein
"CurrentSense Comparator") ausgelöst zu werden
=beide Ausgänge zügigstmöglich low zu ziehen.)
Das Ding ist explizit ein Halbbrückentreiber.
Dessen Kennzeichen ist, daß mit nur einem
Steuersignal ("einer PWM") die Highside mit
diesem, die Lowside komplementär zu diesem
(also invertiert, und mit der nötigen Totzeit
zur Kurzschluß- Vermeidung logischerweise)
arbeiten kann.
[Es gibt auch andere Treiber-ICs, bei denen es
zwei getrennte Eingänge für HS (=HIN) und LS
(=LIN) gibt.
Dabei auch noch verschiedene Ausführungen, mal
mit Begrenzung auf <= ca. 49% Tastgrad wegen
der dann auch vorh. Totzeit, mal mit erlaubter
Überlappung, also ganz ohne Totzeit/Interlock
(für z.B. Asymmetrische Halbbrückenwandler o.
stromgespeiste {=Boost Type} Schaltwandler-
bzw. Stromrichter- Arten oder z.B. auch PSFB).
Was genau man braucht, liegt am Projekt...
Nicht böse gemeint: Weil Dir da offensichtlich
noch einige Kenntnisse zu fehlen scheinen, ist
meine eindeutige Empfehlung, Dein Projekt ganz
offenzulegen, damit Du unnötigen Stolpersteinen
aus dem Weg gehen kannst.]
aeiou schrieb: > ganz ohne Totzeit/Interlock > (für z.B. Asymmetrische Halbbrückenwandler Blöd zusammenkopiert: "Asymmetrische Halbbrücke" braucht ebenfalls eine Totzeit.
aeiou schrieb: > Da bestehen gleich mehrere Mißverständnisse. > Das Ding ist explizit ein Halbbrückentreiber. > > [Es gibt auch andere Treiber-ICs, bei denen es > zwei getrennte Eingänge für HS (=HIN) und LS > (=LIN) gibt. > Ich glaube, der TO braucht einen IR2101
Hans schrieb: > aeiou schrieb: >> Da bestehen gleich mehrere Mißverständnisse. >> Das Ding ist explizit ein Halbbrückentreiber. >> >> [Es gibt auch andere Treiber-ICs, bei denen es >> zwei getrennte Eingänge für HS (=HIN) und LS >> (=LIN) gibt. >> > Ich glaube, der TO braucht einen IR2101 Auch das wäre möglich, weil der TO nicht eindeutig schrieb, er wolle "diesen Brushlesscontroller (vom Artikel) nachbauen" - sondern sich nur (sozusagen "locker" / jedenfalls inkonkret) darauf_bezog. U.a. deswegen meine obige Empfehlung.
Angehängte Dateien:
-

ir2101.jpg
170 KB -

IR2104.jpg
62 KB -

Ansteuerung.jpg
140 KB
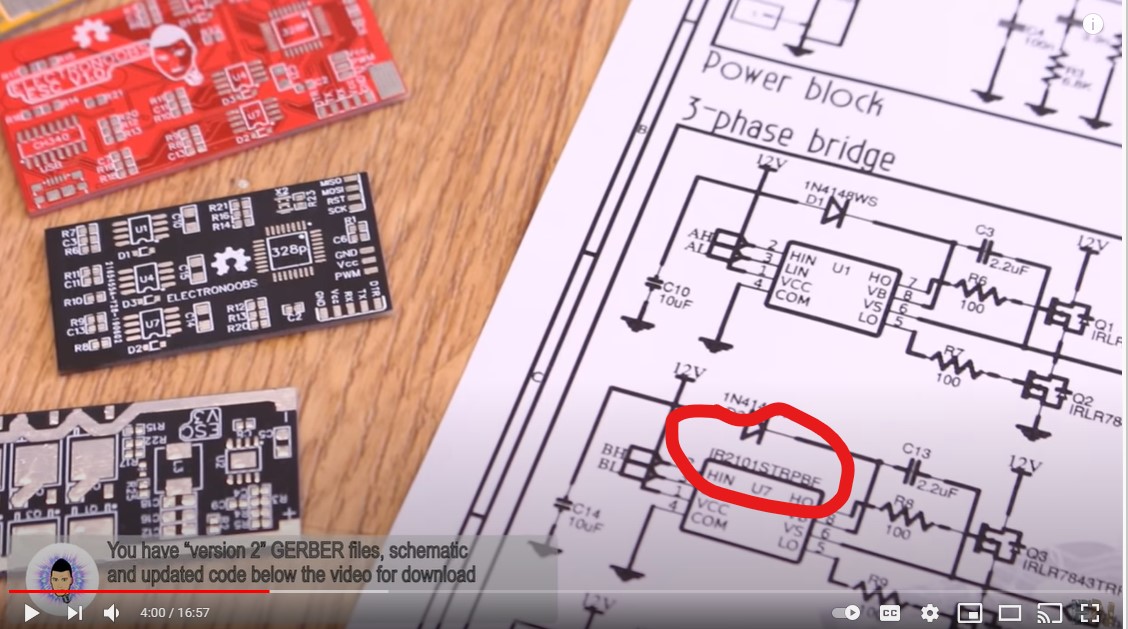
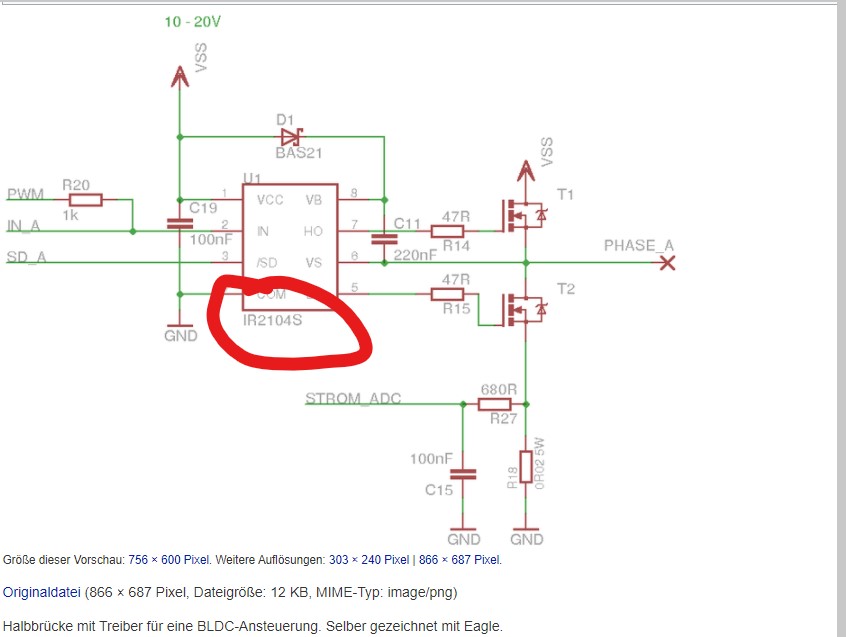
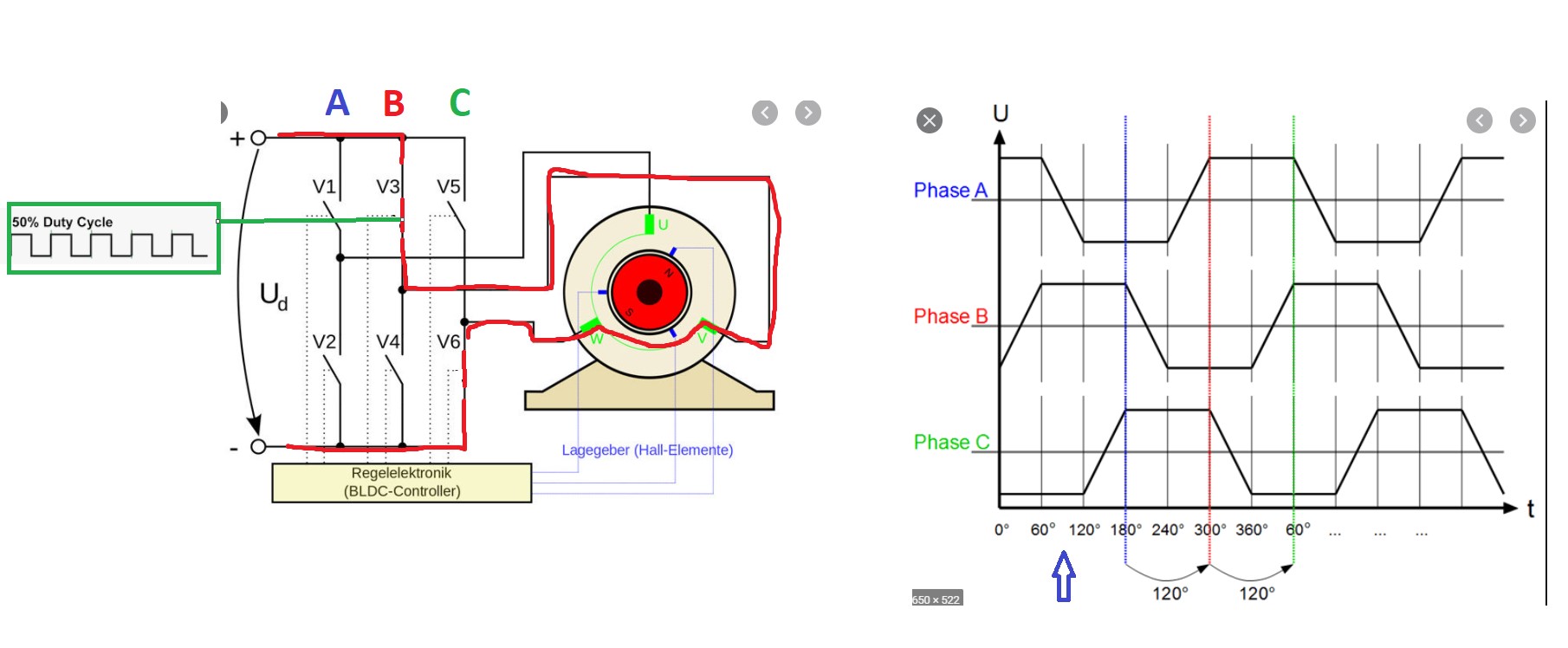
Hallo Freunde Hans schrieb: > aeiou schrieb: >> Da bestehen gleich mehrere Mißverständnisse. >> Das Ding ist explizit ein Halbbrückentreiber. >> >> [Es gibt auch andere Treiber-ICs, bei denen es >> zwei getrennte Eingänge für HS (=HIN) und LS >> (=LIN) gibt. >> > Ich glaube, der TO braucht einen IR2101 Hallo Hans, richtig ich bräuchte einen IR2101. Mit diesem würde es ganz sicher funktionieren, zumindest nach meinem Verständnis. Siehe Bild Ir2101, dazu dieser Link hier, aus dem ich das Bild ausgeschnitten habe: https://www.youtube.com/watch?v=-ymTE-Nivzw Ich bin aber der Meinung, dass es mit einem IR2104 nicht funktioniert, so wie es in dem Link von mir im ersten Post angegeben ist. Bild IR2104. Hier der Link nochmals, aus dem ich das Bild habe: https://www.mikrocontroller.net/articles/Brushless-Controller_f%C3%BCr_Modellbaumotoren Er steuert ja wie er beschreibt mit dem IR2104 auch einen BLDC, welcher ja nur mit 3 solcher Halbbrücken betrieben werden kann. Aber wie soll das denn funktionieren, dazu komme ich weiter unten nochmals mit der Ansteuerung 3 solcher Halbbrücken. Um auf aeiou noch kurz einzugehen, welches Projekt ich damit vorhabe. Um ehrlich zu sein, las ich eine alte Elektorzeitschrift, in der grob die Funktion und Ansteuerung eines solchen BLDCs erklärt wird. Aus Interesse habe ich dann ein wenig recherhiert, als ich mich in dessen Schaltungserklärung näher eingelesen habe. Dann habe ich einige Beispiele zur Ansteuerung gesucht und gefunden, unterdessen auch die in den obigen Links. Deshalb habe ich keine wirkliche Anwendung soweit, mir geht es lediglich um das Verständnis von diesem Chip und wie damit dennoch ein BLDC angesteuert werden kann. Nunja, was ist nun mein wirkliches Verständnisproblem. Ich habe es bereits oben schon einmal versucht zu erklären. Seht euch einmal das Bild "Ansteuerung" an. Es zeigt den Stromverlauf in der 2. Phase an, gekennzeichnet mit einem blauen Pfeil unter dem Diagramm. Der Strom nimmt seinen Weg über V3 zum Motor und über V6 wieder zurück zur Quelle. Interessant ist nun, dass der IR2104 mir zwar die einfache Möglichkeit bietet einfach eine PWM auf den Schalter V3 zu geben. Aber ich will doch nicht, dass mir der Schalter V4 bei jedem Low des PWM Signals schliesst. PS: Oder wie ich das nach dem Aufzeichnen wohl sehe, ist der Grund wohl der, dass ich den Schalter sowieso schliessen muss, sobald der V3 öffnet, weil ansonsten der Strom während dieser Phase viel zu viel Verlust über die Bodydiode von V4 erzeugen würde, das er ja irgendwie weiterfliessen muss.
Hallo Bernd, der Treiber beim ersten Bild scheint mir plausibel wenn man einen 3-Phasen BLDC ansteuern will. Auch ich sehe es so, dass sich der Autor mit dem ir2104 vertippt hat. Gratuliere zu deinem Scharfsinn. Gruss Hans
Also in dem ersten Beitrag verlinkte Seite zum Thema BLDC wird der IR2104 explizit angesprochen (Vor- und Nachteile). Und ehrlich, die Hardware macht keine Programmierfehler. Das Thema Totzeit ist also zuverlässig gelöst. Keine Ahnung woher Deine Angst rührt….
Hans schrieb: > Hallo Bernd, > der Treiber beim ersten Bild scheint mir plausibel wenn man einen > 3-Phasen BLDC ansteuern will. > Auch ich sehe es so, dass sich der Autor mit dem ir2104 vertippt hat. > Gratuliere zu deinem Scharfsinn. > Gruss Hans Hallo Hans Ja wie ich in meinem letzten Beitrag im letzten Absatz geschrieben habe, ist wohl der Unterschied, dass der IR2101 keine dead time hat der IR2104 schon. Beim Ir2101 musst du den low side so programmieren, dass der immer schliesst, wenn der high side öffnet, damit der Strom über den low side FET fliesst anstatt über der Bodydiode. Das macht der IR2104 halt kostenlos. Es funktioniert also mit beiden, nur muss du also mit dem ir2101 also mehr programmieren. Oder du steuerst den low side beim ir2101 gar nicht an und lässt den Strom über dessen Bodydiode laufen. Bei einem kleinen Motor und kleinem Strom ist das vermutlich auch kein Problem. IDeshalb denke ich dass es doch kein Tippfehler ist.
Bernd schrieb: > IDeshalb denke ich dass es doch kein Tippfehler ist. Ja, habe mich noch mal durch das DB des IR2104 gequält, habe shit geschrieben. Gruss Hans
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.