Hallo zusammen, ich möchte mithilfe eines Atmega2560 Pro Mini einen kleinen Bordcomputer für eine Rakete bauen, der so wenig wie möglich wiegen soll. Ich habe 2 Sensoren über den 3,3V Pin, ein SD-Kartenmodul und einen SG90-Servo über 5V angeschlossen und möchte das mithilfe eines 2S-7,4V LiPo mit 300mAh mit Saft versorgen. Ich hab bisher keine gescheite Antwort zu meiner Frage gefunden - brauch ich dafür einen StepDown-Wandler auf 5V, wenn im uC selbst eh ein Spannungsregler drin ist, der alles zwischen 6 und 9V akzeptiert? Ich hab keine großen Anforderungen was die Leistung betrifft, der Servo wird während des Fluges nur ein einziges Mal betätigt, und ansonsten würde ich das Board eh nie mehr als 15 Minuten angesteckt lassen, ohne den Akku wieder zu laden.
Flets schrieb: > Atmega2560 Pro Mini Der hat doch einen Regler rauf. Also ist dein Problem schon gelöst.
Der Uno/Nano etc hat doch auch einen Regler drauf - trotzdem empfiehlt jeder einen vorgeschalteten Regler anzuschließen, deshalb verstehe ich nicht was da den Unterschied macht
Tausend Fliegen können nicht irren! (Schei**e schmeckt gut) Natürlich ist ein Schaltregler u.U. effizienter. Je höher die Spannungsdifferenz und je größer der Strom, desto effizienter. Aber ist Effizienz hier wirklich dein Problem? Evtl. wg dem Servo.... Was zieht der denn?
Flets schrieb: > Atmega2560 Pro Mini Von welchem Hersteller? Der Arduino Mega2560 Pro Mini von Robotdyn hat nur einen Linearregler, also nur entweder 5V oder 3.3V! Der Mega2560 Pro (ohne Mini) hat beide Spannungen. Die Regler scheinen jeweils 800mA zu liefern. LG, Sebastian
Angehängte Dateien:
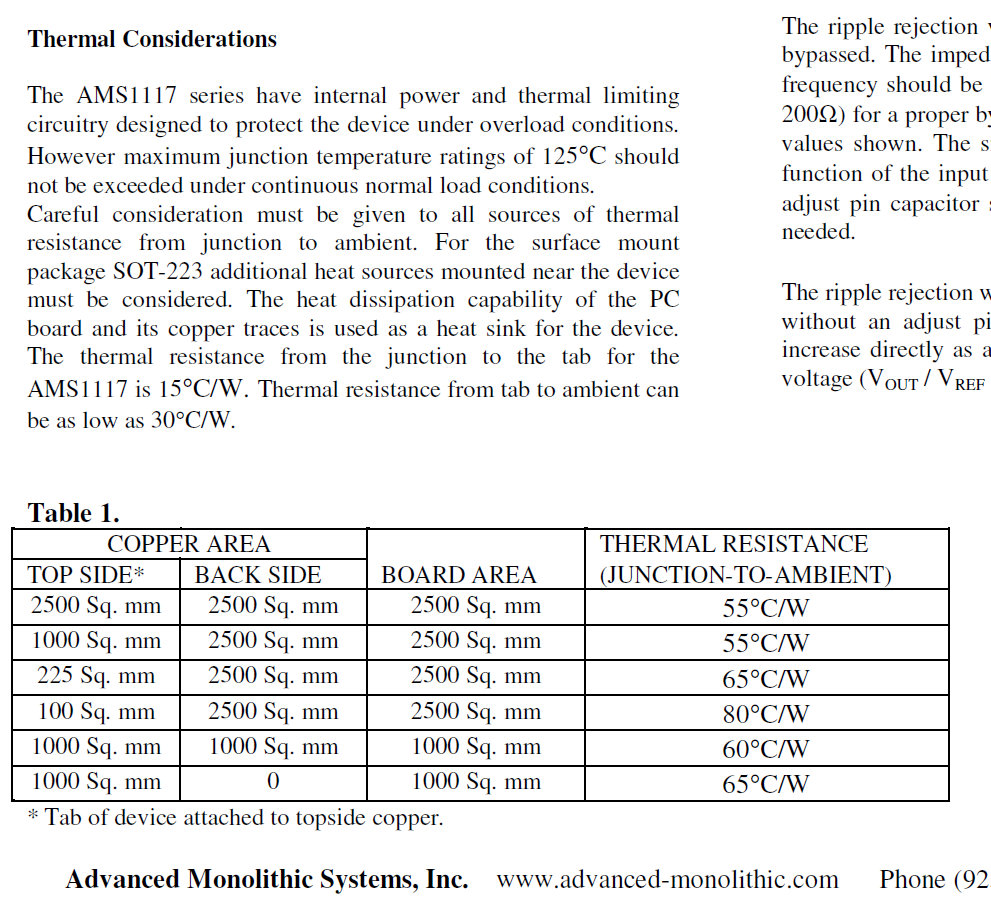
Sebastian schrieb: > Die Regler scheinen jeweils 800mA zu liefern. Das ist nur die eine Seite der Medaille, denn der klitzekleine SOT223-Spannungsregler muss auch die dabei in Form von Wärme anfallende Verlustleistung wegbekommen und an die Umgebung abgeben können. Dafür hat er nur eine klitzkleine Ecke auf der Arduino-Leiterplatte zur Verfügung. Im Datenblatt sind Beispielwerte für 100mm² (=10mm*10mm) durchgehendes "Kühlkupfer" auf der Oberseite und 2500mm² (=50mmx50mm) Kupfer auf der Leiterplattenunterseite mit 80K/W angegeben. Die Fläche auf dem Arduino ist mit Sicherheit kleiner und auch nicht durchgehend. Auf Dauer werden also bei 3V Spannungsabfall (voller 2s-Lipo mit 8,2V auf 5V) nicht viel mehr als 250mA drin sein. Und dann ist in dieser Ecke die Leiterplatte aber richtig HEISS!
Flets schrieb: > und einen SG90-Servo Über das Servo würde ich mir noch etwas Sorgen machen, denn das verträgt lt. Datenblatt nur 6V, kann aber anständig Strom ziehen.
Matthias S. schrieb: > Über das Servo würde ich mir noch etwas Sorgen machen, denn das verträgt > lt. Datenblatt nur 6V, kann aber anständig Strom ziehen. Dem Servo passiert an dem 5V Pin des Arduinos nichts, aber der Rgeler des Arduinos raucht ab. Ob der das erst tut, wenn die einmalige Betätigung des Servos abgeschlossen ist, ist zwar denkbar, aber fraglich. Das wäre eh nur eine Option, wenn der Arduino danach auch nicht mehr benötigt wird. Besser wäre ein 7,4V-tolerantes Servo, das direkt an den Akku angeschlossen wird. Oliver
Lothar M. schrieb: > Sebastian schrieb: >> Die Regler scheinen jeweils 800mA zu liefern. > Das ist nur die eine Seite der Medaille, denn der klitzekleine > SOT223-Spannungsregler muss auch die dabei in Form von Wärme anfallende > Verlustleistung wegbekommen und an die Umgebung abgeben können. > > Dafür hat er nur eine klitzkleine Ecke auf der Arduino-Leiterplatte zur > Verfügung. Im Datenblatt sind Beispielwerte für 100mm² (=10mm*10mm) > durchgehendes "Kühlkupfer" auf der Oberseite und 2500mm² (=50mmx50mm) > Kupfer auf der Leiterplattenunterseite mit 80K/W angegeben. Die Fläche > auf dem Arduino ist mit Sicherheit kleiner und auch nicht durchgehend. > Auf Dauer werden also bei 3V Spannungsabfall (voller 2s-Lipo mit 8,2V > auf 5V) nicht viel mehr als 250mA drin sein. Und dann ist in dieser Ecke > die Leiterplatte aber richtig HEISS! Das wird wohl bei den paar Sekunden (bis einstellige Minuten) Flugdauer nicht wirklich relevant sein, insbesondere nicht bei der üblichen Stromaufnahme des Controllers.
Tim T. schrieb: > Das wird wohl ... nicht wirklich relevant sein Richtig, so nach "wird-wohl-Gefühl" werden heutzutage Steuerungen und Komponenten entwickelt. Ich möchte nicht in einem Aufzug stecken, dessen Steuerung auch mit so einem "wird-wohl-Gefühl" entworfen wurde. > insbesondere nicht bei der üblichen Stromaufnahme des Controllers. Du hast da offenbar vergessen, den "SG90-Servo über 5V angeschlossen" des TO in die Rechnung aufzunehmen. Und schon lange vor dem ersten Flug kommt die Entwicklungsphase, die sicher länger als "einstellige Minuten" dauert...
Oliver S. schrieb: > Dem Servo passiert an dem 5V Pin des Arduinos nichts, aber der Rgeler > des Arduinos raucht ab. Ich hoffe mal, das der TE das Servo nicht über den Arduino Regler betreiben will - aber gespeist werden muss es irgendwoher. Generell scheinen 7,4V nicht so sinnvoll zu sein wie eine 1S Powerbank mit direktem 5V Ausgang. Das kann sogar leichter werden als das ursprüngliche Konzept und kann Servo und Arduino ohne Klimmzüge versorgen.
Lothar M. schrieb: > Tim T. schrieb: >> Das wird wohl ... nicht wirklich relevant sein > Richtig, so nach "wird-wohl-Gefühl" werden heutzutage Steuerungen und > Komponenten entwickelt. Ich möchte nicht in einem Aufzug stecken, dessen > Steuerung auch mit so einem "wird-wohl-Gefühl" entworfen wurde. Ok, wenn du es so willst: Es wird nicht relevant sein. Besser? >> insbesondere nicht bei der üblichen Stromaufnahme des Controllers. > Du hast da offenbar vergessen, den "SG90-Servo über 5V angeschlossen" > des TO in die Rechnung aufzunehmen. Doch hab ich: Flets schrieb: > Ich hab keine großen Anforderungen was die Leistung betrifft, der Servo > wird während des Fluges nur ein einziges Mal betätigt > Und schon lange vor dem ersten Flug kommt die Entwicklungsphase, die > sicher länger als "einstellige Minuten" dauert... Für einen Servo der einmal während des Fluges betätigt wird? Und ansonsten bedeutet das ja auch nicht, dass man während der Entwicklungsphase den Controller nicht aus einer passenden Stromversorgung speist, insbesondere nicht wenn man das Ding sonst immer wieder aufladen muss...
Also, dann wir das den Flets halt einfach so machen. Und falls er es trotzdem mal wissen will oder sich wundert, warum er sich die Finger verbrannt hat, dann hat er ja die Vorlage zum Nachrechnen. Tim T. schrieb: > Für einen Servo der einmal während des Fluges betätigt wird? Und was betätigt der? Denn wenn der Servo gegen eine statische Last betätigt wird, dann nimmt er dauernd Strom auf, weil die Last will ihn zurückdrehen will und der Servo ständig nachregeln muss. Aber auch das wird wohl hoffentlich nicht wirklich relevant sein...
Lothar M. schrieb: > Ich möchte nicht in einem Aufzug stecken ich auch nicht und trotzdem muss lt. Chefetage immer das "Billigste" bestellt werden! (ist sogar gesetzlich in Vorschriften verankert, jedes Abweichen davon bedarf genauester seitenweise Begründungen die auch wieder weggewischt werden können)
Flets schrieb: > ich möchte ich auch vieles nur wenn der Plan "broken by design" ist dann gibts kaum Lösungen. Wenn das Konzept nicht stimmt findet man u.U. nicht die passenden Bauteile.
Flets schrieb: > ich möchte mithilfe eines Atmega2560 Pro Mini einen kleinen Bordcomputer > für eine Rakete bauen, der so wenig wie möglich wiegen soll Dann solltest du dir auch mal Gedanken über einen kleineren Controller machen. Bei deinen Anforderungen geht es sicher kleiner.
Lothar M. schrieb: > Und was betätigt der? Vermutlich den Fallschirm. Viel Auswahl hat man ja bei einer Rakete nicht.
Matthias S. schrieb: > Lothar M. schrieb: >> Und was betätigt der? > > Vermutlich den Fallschirm. Viel Auswahl hat man ja bei einer Rakete > nicht. Tja, aber für Lothar scheint das nicht so klar zu sein was man bei einer Rakete mit einem Servo machen kann und es wird wieder alles extremst over-engineered. Natürlich kann man immer irgendwelche Skizzen, Schaltpläne, Sourcecode, etc. verlangen um letztlich dann doch drauf zu kommen, dass die Antwort eigentlich auch ohne alle diese Sachen hätte gegeben werden können. Außer Fallschirm fällt mir da auch nicht wirklich was ein, wobei ich das nicht mit einem Servo machen würde und vom Controller auch nur die Steuerspannung dafür nehmen würde...
Tim T. schrieb: > Tja, aber für Lothar scheint das nicht so klar zu sein was man bei einer > Rakete mit einem Servo machen kann Nein, ich bin halt einfach nicht so gut im Raten wie andere, ich rechne lieber kurz nach. Ist ja auch kein Aufwand, wenn man weiß, wie es geht. > und es wird wieder alles extremst over-engineered. Meine "Rechnung" hat nichts mit "extremst viel mehr als nötig" zu tun, sie ist vielmehr die Grundlage bei der Schaltungsauslegung und im Grunde die Ursache für Flets Frage. Und sie ergibt auch die Antwort darauf, denn wenn er sagen kann: "das Servo ist insgesamt lastfrei und braucht nur fürs Schwenken kurz Energie", dann packt der 5V-Linearregler das locker, weil er die dabei anfallende Verlustleistung in die Leiterplatte einlagern kann. Und wenn zudem die restlichen 2 unbekannten Sensoren (die ihren Strom ja auch über den 5V-Regler beziehen) und die SD-Karte samt dem ATmega nur 50mA brauchen, dann kommt durch die resultierenden 150mW noch eine Temperaturerhöhung um etwa 20°C an der Spannungsreglerecke zustande. Und damit braucht er keinen Schaltregler für die 5V.
"The servo runs on 5V with a current draw about 10mA at idle and 100mA to 250mA when being commanded to move depending on how it is being operated. Current draw can get up to a maximum of 360mA under a stall condition." Ich würde mir mehr Sorgen über lockere Steckverbinder und die SD-Karte machen. Während der Motor läuft und beim Aufprall wirken reichlich mechanische Kräfte. LG, Sebastian
Flets schrieb: > Ich habe 2 Sensoren über den 3,3V Pin, ein SD-Kartenmodul Beschreibe doch mal, was das für Sensoren sind.
Brain 2.0 schrieb: > Flets schrieb: >> Ich habe 2 Sensoren über den 3,3V Pin, ein SD-Kartenmodul > > Beschreibe doch mal, was das für Sensoren sind. Meine Kristallkugel sagt es sind ein Barometer und ein Beschleunigungssensor...
Könnte aber auch was mit GPS zu tun haben...
Lothar M. schrieb: > Könnte aber auch was mit GPS zu tun haben... Wäre dann der Barometer Ersatz. Für viel mehr als die Höhenermittlung wird man das GPS dank unserer tollen Gesetze eh nicht benötigen.
Sehr gut. Meine Kristallkugel ist in Quarantäne.
Ich werfe mal meine Glaskugel an: Flets schrieb: > Atmega2560 Pro Mini 15g > 2 Sensoren vermutlich auf break out boards 3g? > SD-Kartenmodul vermutlich auf break out board 3g? > SG90-Servo 9g > 2S-7,4V LiPo mit 300mAh 12-20g Arduino-konforme Steckbrett Verkabelung 10g => 50-60g + Raketenteile, Antrieb, Fallschirm, etc... Würde mich interessieren, was du da bauen möchtestest, da 50g zusätzliches Gewicht für Modellraketen mw. viel ist. Du könntest das Gewicht durch die Wahl anderer Komponennten und dem Design einer eigenen Leiterplatte deutlich veringern. Wenn das Servo wegfallen könnte und ein EEPROM/Flash/etc. ausreicht, könnte deutlich unter 10g (cr2025=2,5g) realistisch sein. Matthias S. schrieb: > Lothar M. schrieb: >> Und was betätigt der? > > Vermutlich den Fallschirm. Normalerweise zünden die Antriebe nach dem Ausbrennen, oft Zeitverzögert, eine kleine Ladung, die die Spitze abwerfen und den Fallschirm freisetzen soll.
Lothar M. schrieb: > Nein, ich bin halt einfach nicht so gut im Raten wie andere, ich rechne > lieber kurz nach. Auf https://www.addicore.com/FS90-Mini-Servo-p/AD113.htm wird angegeben, dass bis zu 800mA anfallen könnten. Das wird wieder einer der Fälle, wo anschließend auf die schlechten China-Längsregler geschimpft wird. Ist bei den makern gerne genommen, Netzteil dran und aus dem Arduinoboard 5V-Peripherie speisen bis der xx1117 den Deckel hebt. Flets schrieb: > Ich hab bisher keine gescheite Antwort zu meiner Frage gefunden - brauch > ich dafür einen StepDown-Wandler auf 5V, wenn im uC selbst eh ein > Spannungsregler drin ist Du solltest einen eigenen Regler für den Servo einplanen. Bedenken bzgl. Überlastung des A*-Reglers wurden schon genannt und nachdem ich Werte zum Strom gefunden habe, sind die vollkommen berechtigt.
Manfred schrieb: > Lothar M. schrieb: >> Nein, ich bin halt einfach nicht so gut im Raten wie andere, ich rechne >> lieber kurz nach. > > Auf https://www.addicore.com/FS90-Mini-Servo-p/AD113.htm wird angegeben, > dass bis zu 800mA anfallen könnten. > > Das wird wieder einer der Fälle, wo anschließend auf die schlechten > China-Längsregler geschimpft wird. Ist bei den makern gerne genommen, > Netzteil dran und aus dem Arduinoboard 5V-Peripherie speisen bis der > xx1117 den Deckel hebt. Danke das du den Thread nicht gelesen hast! > Flets schrieb: >> Ich hab bisher keine gescheite Antwort zu meiner Frage gefunden - brauch >> ich dafür einen StepDown-Wandler auf 5V, wenn im uC selbst eh ein >> Spannungsregler drin ist > > Du solltest einen eigenen Regler für den Servo einplanen. Bedenken bzgl. > Überlastung des A*-Reglers wurden schon genannt und nachdem ich Werte > zum Strom gefunden habe, sind die vollkommen berechtigt. Und nochmal danke das du den Thread nicht gelesen hast und offensichtlich auch keinen Plan vom Servo hast.
Tim T. schrieb: > Danke das du den Thread nicht gelesen hast! Oh doch, ich habe gelesen und entschieden, auf Deine Kommentare nicht einzugehen.
Sorry dass ich mich erst jetzt wieder melde....sind ja einige Infos und Ratschläge hier zusammengekommen. Also um das Ganze zusammenzufassen: Der Servo ist nie unter Last, das Einzige was der macht, ist am Hochpunkt einen Pin linear zurückzuziehen, um die Fallschirmklappe zu öffnen. Die eingesetzten Sensoren sind - Tim T. schrieb: > Meine Kristallkugel sagt es sind ein Barometer und ein > Beschleunigungssensor... - richtig, ein BMP-280 und ein MPU-6050. Und das wird alles in einer 3D-gedruckten Plate versenkt, ohne PCB, um Gewicht zu sparen, deshalb auch der extrem kleine Akku (200mAh statt 300 - wären immerhin wieder 13 Gramm weniger). Und ich werde ebenfalls einen StepDown-Konverter vorschalten. Und wenn ich es richtig verstanden habe dann wär es gescheit, den Servo direkt am Output vom Konverter anzuschließen und nicht am VCC vom Board?
Und das hab ich vergessen zu sagen: es handelt sich um eine Wasserrakete, keine pyrotechnische. Deshalb ist der Servo unabdingbar. Und das SD-Modul benötige ich zur Flugaufzeichnung. Ich hatte deshalb schon überlegt ein ESP32 Modul anstelle des Mega2560 Pro Mini zu verwenden damit ich kein zusätzliches SD-Kartenmodul benötige, aber da bin ich mir noch ziemlich unsicher
Flets G. schrieb: > es handelt sich um eine Wasserrakete, In dem Falle kannst Du der heiße Ecke mit Linearregler eine Wasserkühlung verpassen.
Flets G. schrieb: > den Servo direkt am > Output vom Konverter anzuschließen und nicht am VCC vom Board? Wenn du einen 5V-Schaltregler "vorschaltest", dann musst du den 5V-Linearregler auf dem Andruiden umgehen. Denn der braucht mindestens 6,5V Eingangsspannung, damit er wie gewünscht funktioniert. Und je nach Schaltplan sitzt noch eine Verpolschutzdiode davor, so dass du dort für korrekte Funktion mindestens 7V einspeisen musst. Du solltest also unbedingt die Schaltung deines Arduinos dahingehend noch genau anschauen. > ich werde ebenfalls einen StepDown-Konverter vorschalten. Fazit des ganzen Hickhack hier: lass den weg.
Flets G. schrieb: > - richtig, ein BMP-280 und ein MPU-6050. Flets G. schrieb: > es handelt sich um eine Wasserrakete Bei meinen Wasserraketen-Experimenten war die Beschleunigung beim Start teilweise jenseits von 16G. Da könntest du mit dem MPU-6050 Probleme bekommen. Aber Versuch macht kluch ... LG, Sebastian
Der µC hat einen Spannungsregler, wie Du schriebst. D.h. für diesen brauchst Du nichts mehr zu machen, außer vielleicht noch eine Schottky-Diode als Verpolschutz, wenn das erwünscht ist. Allerdings darfst Du die Ausgänge des µC nicht besonders belasten. Am besten steuern die Ausgänge einen Leistungshalbleiter an, der das Servo und die Fallschirmauslösung treibt, die beide eine eigene stabilisierte Spannung erhalten, sofern diese wirklich nur 5V vertragen sollten. Wenn die Abwärme ein Problem sein sollte, hätte ich so etwas wie einen LM317, bzw. moderneren Typ, an das Gehäuse befestigt, wo die Wärme gut an das vorbeistömende Wasser abgegeben werden könnte.
Tim T. schrieb: > Lothar M. schrieb: >> Könnte aber auch was mit GPS zu tun haben... > > Wäre dann der Barometer Ersatz. Für viel mehr als die Höhenermittlung > wird man das GPS dank unserer tollen Gesetze eh nicht benötigen. Was soll das jetzt bedeuten. Spielst du auf die COCOM-Grenzen an? Wenn die Rakete die 1.5 Mach und/oder die 60000 ft knackt, hätte das GPS ein Problem, wobei ein Barometer ohne Zusatzdaten zum aktuellen Atmosphärenzustand für die Höhe eher nur einen Schätzwert liefern kann, es sei denn, man interessiert sich für den Flight-Level als Höhenmaß.
Da du nur I2C für die Sensoren benötigst, reicht doch ein ESP8266-01. Der ist klein, leicht und braucht auch wenig Strom. Denke mal drüber nach.
Wolfgang schrieb: > Tim T. schrieb: >> Lothar M. schrieb: >>> Könnte aber auch was mit GPS zu tun haben... >> >> Wäre dann der Barometer Ersatz. Für viel mehr als die Höhenermittlung >> wird man das GPS dank unserer tollen Gesetze eh nicht benötigen. > > Was soll das jetzt bedeuten. Spielst du auf die COCOM-Grenzen an? > Wenn die Rakete die 1.5 Mach und/oder die 60000 ft knackt, hätte das GPS > ein Problem, wobei ein Barometer ohne Zusatzdaten zum aktuellen > Atmosphärenzustand für die Höhe eher nur einen Schätzwert liefern kann, > es sei denn, man interessiert sich für den Flight-Level als Höhenmaß. Luftverkehrs-Ordnung (LuftVO) § 21b Verbotener Betrieb von unbemannten Luftfahrtsystemen und Flugmodellen (1) Der Betrieb von unbemannten Luftfahrtsystemen und Flugmodellen ist verboten, sofern er nicht durch eine in § 21a Absatz 2 genannte Stelle oder unter deren Aufsicht erfolgt, 1. außerhalb der Sichtweite des Steuerers nach Maßgabe des Satzes 2, sofern die Startmasse des Geräts 5 Kilogramm und weniger beträgt, Ergo brauchst du kein GPS um das Modell wiederzufinden weil du es nicht aus dem Blick verlieren darfst und die einzig interessante Information die dir ein GPS dann noch liefern würde, ist die Höhe, die aber leichter (Gewicht) mit einem Barometer festzustellen ist.
Ich würde den Mini direkt aus dem Akku versorgen. Den Mega und die zwei Sensoren schafft der Linearregler. Den Servo über einen Transistor schalten, da die Ausgänge nur 20-40mA abkönnen. Vorher einfach "im Labor" probieren, ob der Servo die 7,4V verträgt - vermutlich ja, dann braucht der auch keine weitere Regelung. Kannst Du nicht die SD-Karte weglassen, indem die Meßdaten in das EEPROM des Mini geschrieben werden? Mein Tip: verlöte die Kabel unbedingt, denn die arduinotypischen Steckverbinder (DuPont) dürften viel zu unzuverlässig sein.
Sebastian W. schrieb: > Beschleunigung beim Start teilweise jenseits von 16G In diesem Fall gillt, weniger ist mehr. Flets G. schrieb: > Der Servo ist nie unter Last, das > Einzige was der macht, ist am Hochpunkt einen Pin linear zurückzuziehen, > um die Fallschirmklappe zu öffnen. Falls es unbedingt elektrisch sein muss, schlage ich anstelle eines Servos die Umsetzung mit einem leichten, kleinen Elektromagneten und einer Feder vor. Mögliche Beispiele, wahllos herausgegriffen um mögliche Prinzipien zu nennen: https://www.magna-c.de/Elektromagnete/Permanentmagnete-elektrisch-abschaltbar/ oder https://de.aliexpress.com/item/33017640547.html Natürlich müsstest du dir unter Umständen andere, möglichst leichte Magnete mit der passenden Spannung suchen oder selbst wickeln. Gegebenenfalls kommst du mit nur einer Zelle aus. Optimal wäre natürlich die Ansteuerung mit einem Mosfet im SOT-223 Gehäuse oder Kleiner, das auf der selben Platine, wie die restliche Elektronik untergebracht wäre. Alternativ könnte man das Problem auch mechanisch lösen und den abnehmenden Druck im Tank (in Verbindung mit einer Feder) nutzen.
Lothar M. schrieb: > dann musst du den > 5V-Linearregler auf dem Andruiden umgehen Und wenn ich den Konverter an den 5V-Pin anschließe, hab ich den internen Regler ja umgangen und es funktioniert oder?
Brain 2.0 schrieb: > reicht doch ein ESP8266-01 Der arbeitet mit 3,3V, das funzt ja dann mit dem Servo wieder nicht
Flets G. schrieb: > hab ich den internen Regler ja umgangen Auf dem Andruiden ist nichts "intern". Du kannst dir wie gesagt den Schaltplan herunterladen und/oder auf der Leiterplatte schauen, welcher Regler da verbaut ist. Und dann kannst du dessen Datenblatt anschauen und kontrollieren, ob diese Betriebsart vorgesehen ist. > und es funktioniert oder? Der Betriebszustand dürfte außerhalb der Spec sein. Da kann von "geht tadellos" bis "Ausgang nimmt Strom auf" bis "riecht seltsam" alles Mögliche passieren. Erst wenn du den Linearregler ausbaut, bist du auf der sicheren Seite. Aber warum willst du denn überhaupt unbedingt diesen Schaltregler mit reinfrickeln?
Flets G. schrieb: > Und wenn ich den Konverter an den 5V-Pin anschließe, hab ich den > internen Regler ja umgangen und es funktioniert oder? Bei dem bißchen Spannungsdifferenz bringt ein Schaltregler kaum Gewinn, ich würde mal über den LM1117 nachdenken. Ich würde den A* weiterhin über dessen internen Regler speisen, das koppelt evtl. Störungen durch den Servo vom µC ab. Lothar M. schrieb: > Auf dem Andruiden ist nichts "intern". Du kannst dir wie gesagt den > Schaltplan herunterladen und/oder auf der Leiterplatte schauen, > welcher Regler da verbaut ist. Und dann kannst du dessen Datenblatt > anschauen und kontrollieren, ob diese Betriebsart vorgesehen ist. Das ist richtig, man muß gucken. Typisch ist auf den A* ein A_irgendwas_1117-50 drauf, die machen bei Rückenwind keinen Ärger. > Aber warum willst du denn überhaupt unbedingt diesen Schaltregler mit > reinfrickeln? Dazu sehe ich im Thread keinen Konsens. Lassen wir mal die thermische Betrachtung draußen vor, bleibt immer noch das ungute Gefühl, dass der Servo genug Strom ziehen könnte , die 5V des A*-Reglers in den Keller zu ziehen. Ich bin sehr konservativ unterwegs und habe Leistungszweig / µC-Versorgung gerne getrennt, die forumstypischen Probleme "mein xy stürzt ab, wenn ..." habe ich nicht.
Manfred schrieb: > Lassen wir mal die thermische Betrachtung draußen vor, bleibt immer noch > das ungute Gefühl, dass der Servo genug Strom ziehen könnte , die 5V des > A*-Reglers in den Keller zu ziehen. Dann "könnte" es aber auch sein, dass der aus Gewichtsgründen mickrig gewählte und bisher unbekannte Schaltregler schon vorher einknickt. > dass der Servo genug Strom ziehen könnte Ich würde das einfach mal ausprobieren: den Servo laufen hin- und her zappeln lassen und schauen, was passiert. Und wenn ich dann noch einen Strommesser griffig hätte, dann würde ich einen Stall machen und die Ratestunde wäre schlagartig zu Ende.
Flets G. schrieb: > Brain 2.0 schrieb: >> reicht doch ein ESP8266-01 > > Der arbeitet mit 3,3V, das funzt ja dann mit dem Servo wieder nicht Schon mal was mit Spannungsrglern und Levelshiftern gehört ?
Lothar M. schrieb: > Du kannst dir wie gesagt den > Schaltplan herunterladen und/oder auf der Leiterplatte schauen, > welcher Regler da verbaut ist. Und dann kannst du dessen Datenblatt > anschauen und kontrollieren, ob diese Betriebsart vorgesehen ist. Wenn ich richtig gelesen habe dann liefert der AMS1117-5.0 ja 1 Ampere, braucht jedoch mindestens 6,5V Eingangsspannung wie lkmiller bereits erwähnt hat, dann kann ich den Konverter echt weglassen xD Sorry dass ich mich so anstelle, ich hab echt noch viel zu wenig Ahnung von dem Ganzen hier, ich möcht halt nur auf Nummer sicher gehen dass es auch ordentlich funktioniert
Flets G. schrieb: > AMS1117-5.0 ja 1 Ampere, braucht jedoch mindestens 6,5V Eingangsspannung Suche dir einen passenden LDO (low Drop out) Regler. Diese haben Mindestspannungsdifferenzen im 2-3-stelligen mV Bereich.
Flets G. schrieb: > Wenn ich richtig gelesen habe dann liefert der AMS1117-5.0 ja 1 Ampere Das Datenblatt hat nicht nur eine erste Seite... Und auf der Seite 3 findet sich dann:
1 | Current Limit min. 900mA - typ. 1100mA - max. 1500mA |
Franz M. schrieb: > Suche dir einen passenden LDO (low Drop out) Regler. Das ist hier aber eigentlich nicht das Problem, denn der Akku ist bei 6,5V eh' schon "voll leer".
Flets G. schrieb: > AMS1117 Es gibt den 1117 von unterschiedlichen Herstellern mit unterschiedlichen Ratings. Es kann passieren, dass der aus China in einem Betriebszustand durchlegiert, während der eines Markenherstellers an gleicher Stelle problemlos funktioniert. (Eigene Erfahrung = nicht zwingend allgemeingültig) Meistens wird der 1117 nur mit 800mA beworben. Darum ist das exakte Datenblatt empfehlenswert.
Es gibt auch Servos, die direkt an 2 Zellen angeschlossen werden können. ZB.https://www.robotshop.com/de/de/9g-micro-servomotor-74v.html
Beitrag #6728791 wurde von einem Moderator gelöscht.
vergiß das einfach. Nimm das hier für das Servo: https://hobbyking.com/de_de/hobbykingtm-micro-bec-5v-1a.html?queryID=&objectID=47024&indexName=hbk_live_products_analytics Das wird deine Rakete auch noch verkraften. Oliver
Angehängte Dateien:
-

Schaltbild1.jpg
220 KB
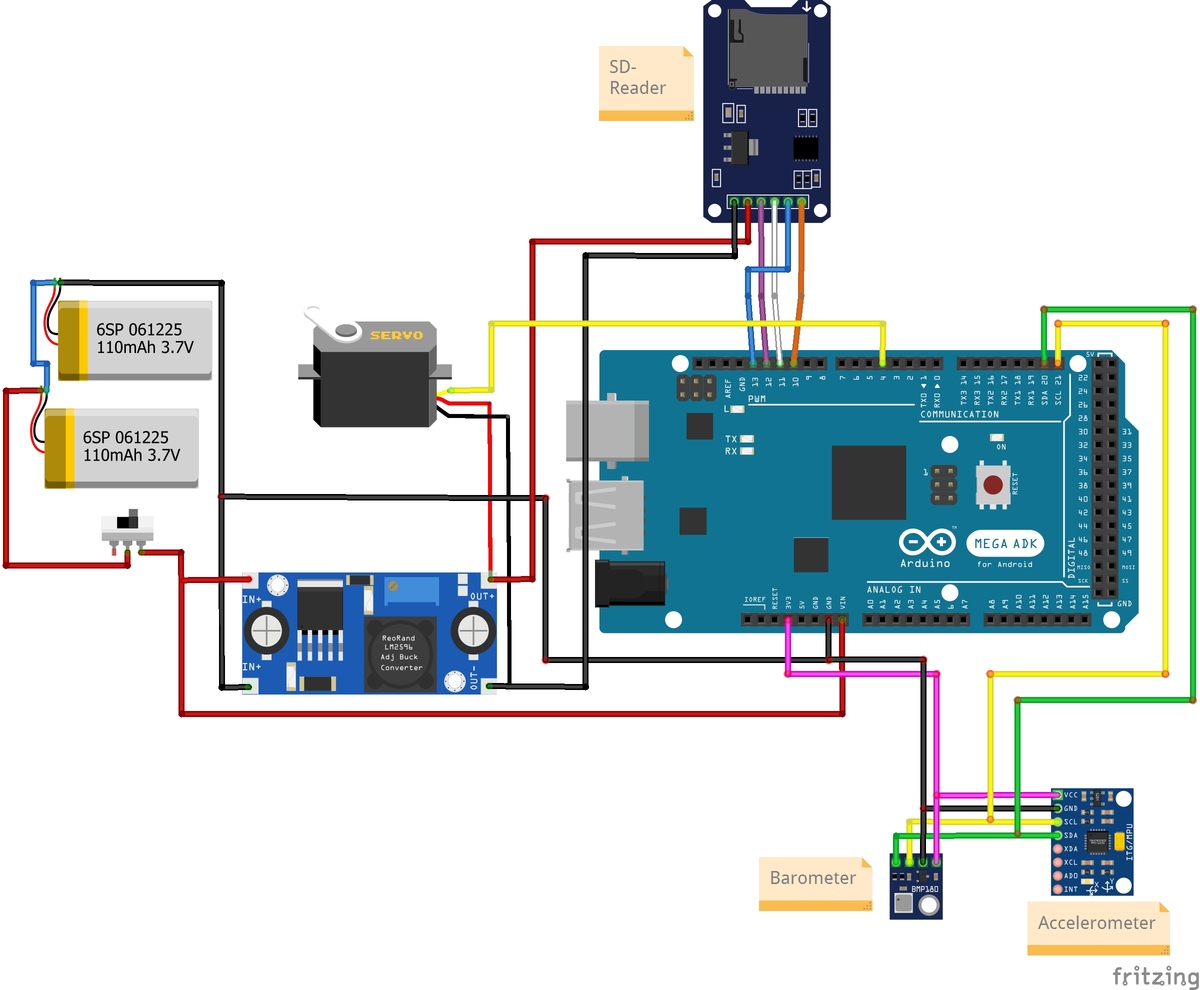
Und wenn mans so macht?(beim vorherigen Bild hab ich was vergessen)
Bitte überlege dir, ob das zusätzliche Gewicht und eine mögliche Verschiebung des Schwerpunktes nicht die Performance signifikannt beeinflusst und es nicht notwendig ist dein Konzept zu überarbeiten. Vorschlag: Wiege die geplanten Komponennten und befestige Gewichte an den vorgesehenen Stellen. Dann mache einen Probestart und überprüfe, ob du mit den Flugeinschaten zufrieden bist.
Hab ich bereits gemacht, hab auch den Tank vergrößert, das Gewicht des Fallschirms um das entsprechende Gewicht der Steuereinheit verringert und der verschobene Schwerpunkt sorgt dafür, dass die Rakete leicht schräg nach draußen auf den Acker fliegt
Angehängte Dateien:
-

sg90_0deg.png
110 KB -

sg90_180deg.png
120 KB -

sg90_180deg_blocked.png
130 KB -

sg90_180deg_peak.png
120 KB
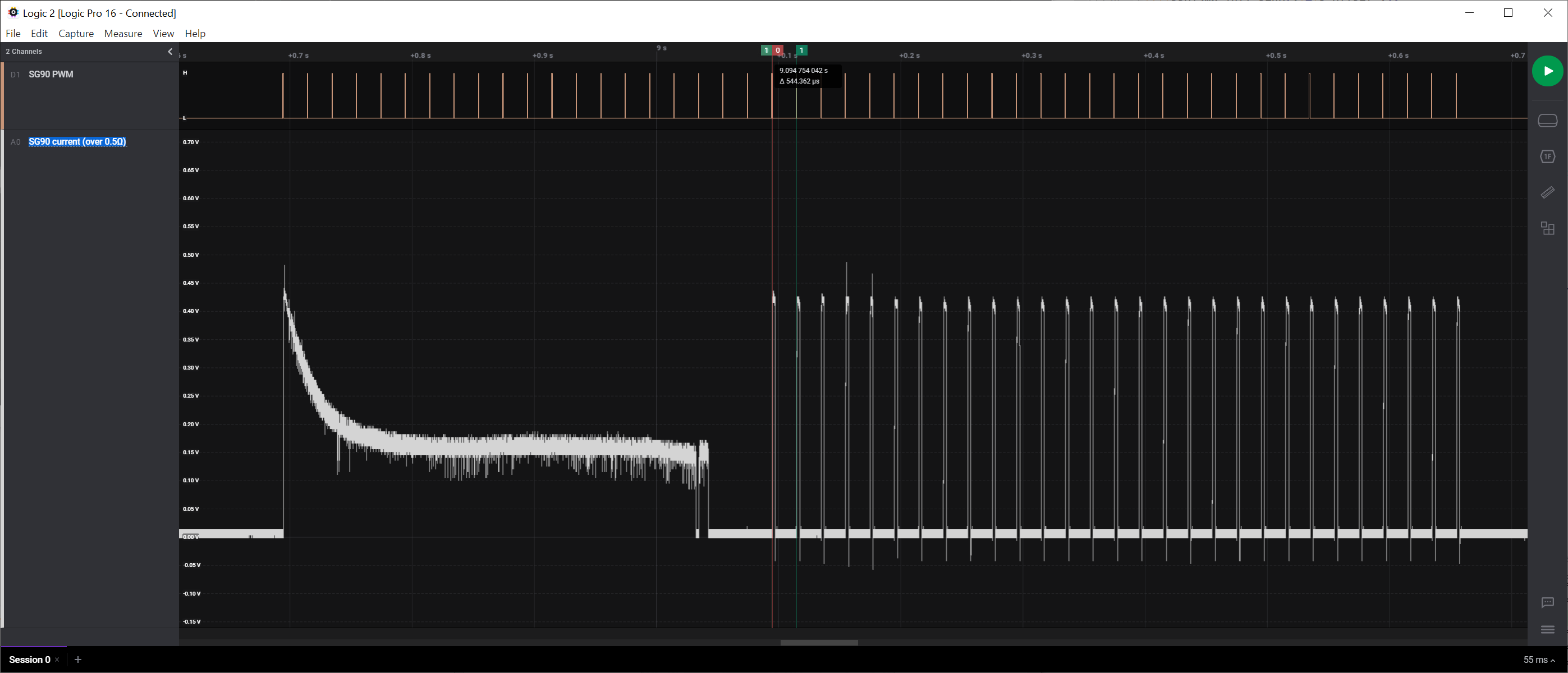
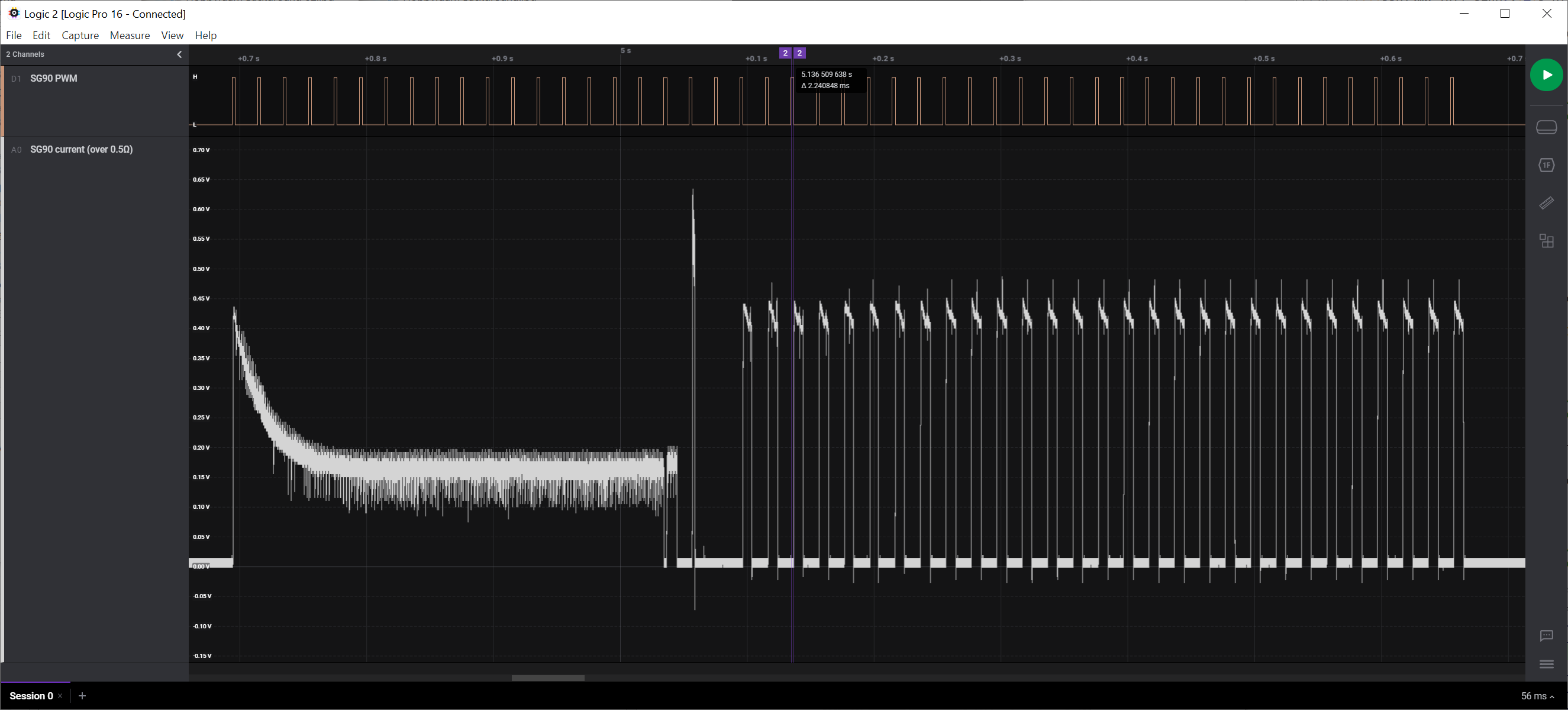
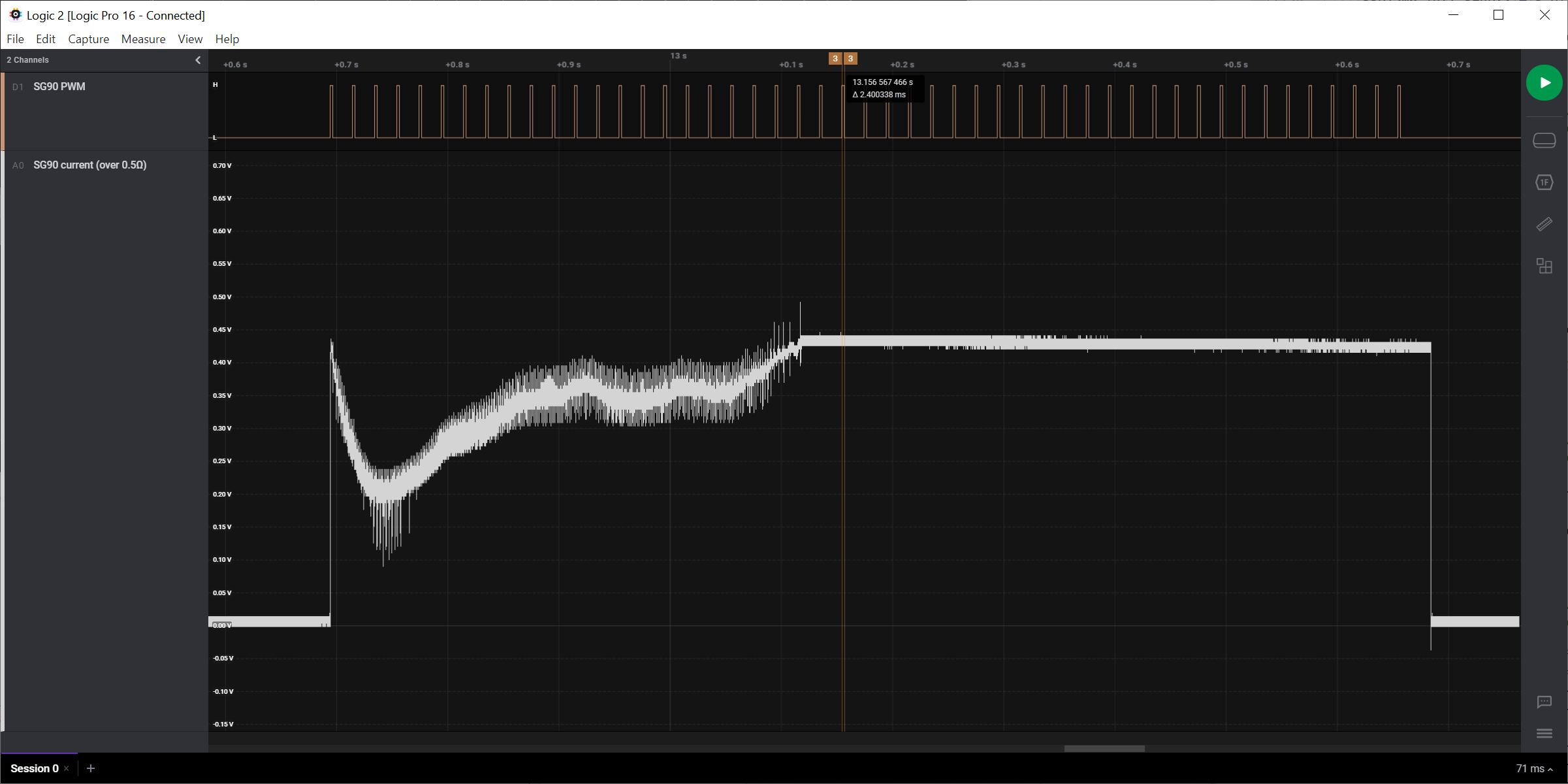
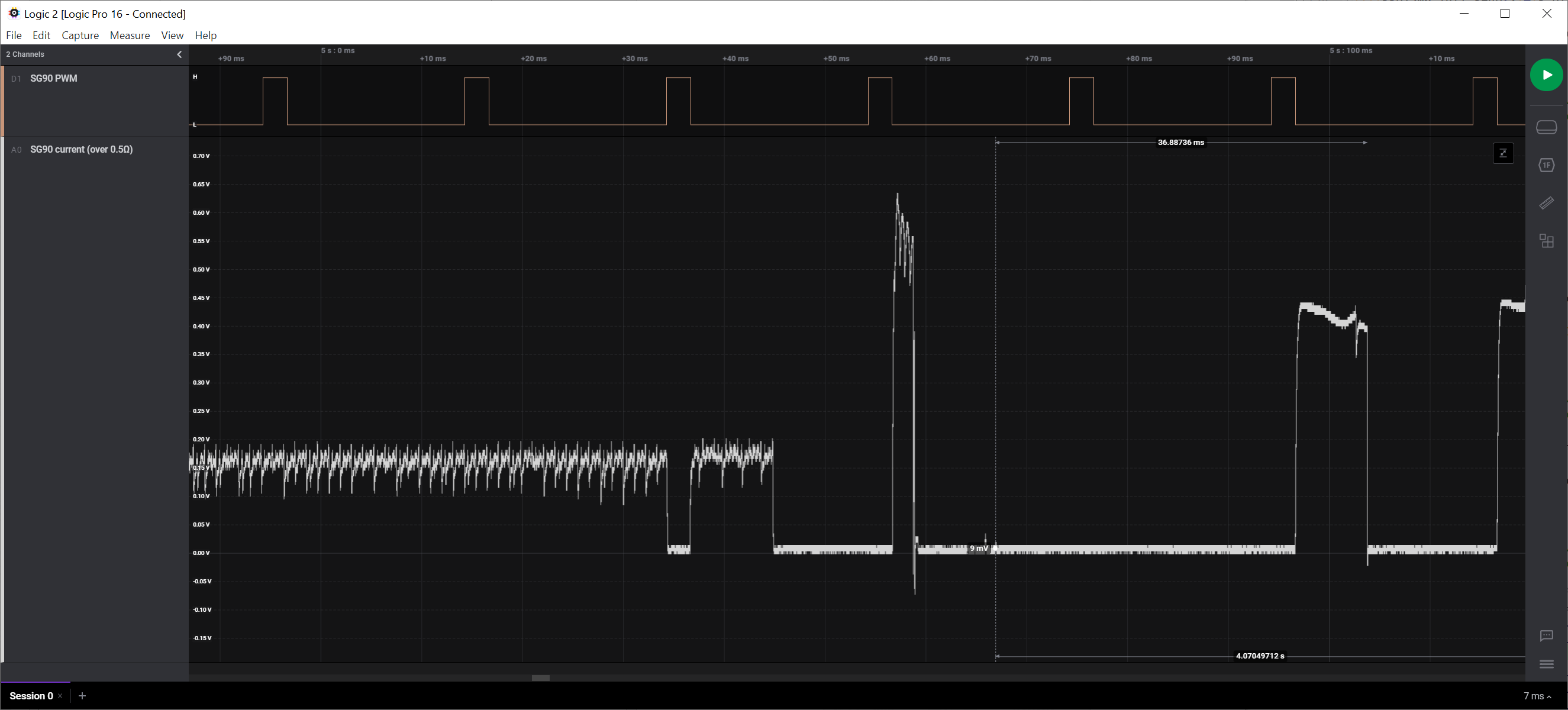
Anbei Strommessungen am SG90 bei 5V über zwei parallele 1Ω. In der Spitze messe ich kurzzeitig 500-630mV ≘ 1-1.3A, blockiert dauerhaft 430mV ≘ 0.9A, bei freier Bewegung 200mV ≘ 0.4A.
1 | void loop() { |
2 | myservo.attach(9); |
3 | myservo.write(0); |
4 | delay(1000); |
5 | myservo.detach(); |
6 | delay(3000); |
7 | myservo.attach(9); |
8 | myservo.write(180); |
9 | delay(1000); |
10 | myservo.detach(); |
11 | delay(3000); |
12 | }
|
LG, Sebastian
Mein SG90 funktioniert ab 3.4V. Du könntest dir also wohl den zweiten LiPo und den Schaltregler sparen, bräuchtest dann aber einen besseren Linearregler runter auf 3.3V als den AMS1117. Den uC könntest du zwar ganz ohne Regler direkt am LiPo mit 8MHz betreiben, die Sensoren mögen aber die Ladeschlussspannung des LiPo nicht. Haben deine Module (BMP280, MPU6050) eventuell eigene Regler an Bord? LG, Sebastian
Flets G. schrieb: > Und wenn mans so macht? Ich hoffe, dass dir klar ist, dass In- (so sollte wohl einer der beiden In+ heißen) und Out- vom Schaltregler verbunden sind? Da ist 1 dicke Leiterbahn dazwischen. Du hast also nur 1 einzige Masse in deinem System (zum Glück!) und kannst die schwarzen Leitungen miteinander verbinden. BTW: wenn du unbedingt den Schaltregler einbauen willst, dann tu es einfach. Vergiss die Ratschläge und Tipps mit dem "Strom messen" und was auch immer. Leider wirst du dann auch nichts lernen, sondern auch in Zukunft einfach nur Drauflosfrickeln.
Vielen Dank für die Mühe Sebastian! Mann dass das so kompliziert ist hätte ich nie gedacht, aber man lernt ja mit der Zeit einiges dazu.... Alternativ zum SG90 hätt ich mir jetzt vielleicht noch so einen Linearservo wie den hier vorgestellt: https://www.conrad.at/de/p/agf-rc-mini-servo-c1-5csl-r-linear-servo-getriebe-material-plastik-stecksystem-micro-jst-2100691.html#attributesNotes_delivery Scheint für 5V ausgelegt zu sein, fraglich ist nur ob der ähnlich viel zieht wie der SG90 und auch ganz normal über die Servo-Bibliothek anzusteuern ist? Beim BMP280 ist kein Regler drauf, der MPU6050 hat einen, ich hab beide aber am 3,3V Pin hängen
Ja das macht irgendwie Sinn...An allen Ecken und Enden fehlts an Grundwissen. Sollte wohl mehr in den Vorlesungen aufpassen... Ich denk ich werd es einfach mal auf beide Arten probieren, egal was dabei rauskommt. Am Ende des Tages weiß ich dann mehr und mit der Zeit kommt wohl auch die Erfahrung dazu :D
Flets schrieb: > Hallo zusammen, > ich möchte mithilfe eines Atmega2560 Pro Mini einen kleinen Bordcomputer > für eine Rakete bauen, der so wenig wie möglich wiegen soll. Dann laß den Arduino weg und mach ein eigenes Board wo alles drauf ist was Du brauchst. Dann hast Du alle Freiheiten, Gewicht zu sparen. Bei dieser Gelegenheit auch am besten gleich auf einen 32-Bit Controller gehen. Alleine für den Servo empfiehlt sich hier übrigens schon ein Schaltregler. Schau aber erst mal, ob der 300mAh Akku überhaupt den Strom für den Servo liefern kann.
Andreas B. schrieb: > Dann laß den Arduino weg und mach ein eigenes Board wo alles drauf ist > was Du brauchst. Dann hast Du alle Freiheiten, Gewicht zu sparen Wurde bereits vorgeschlagen. Der TO ist nicht darauf eingegangen. Er möchte vermutlich alles genau so umsetzen, wie er das bereits vor dem Ersten Beitrag geplant hat. Es gibt keinerlei Flexibilität. Übrigens ist das Gewicht eigentlich nebensächlich. Flets G. schrieb: > hab auch den Tank vergrößert, das Gewicht des Fallschirms um das > entsprechende Gewicht der Steuereinheit verringert und der verschobene > Schwerpunkt sorgt dafür, dass die Rakete leicht schräg nach draußen auf > den Acker fliegt Dies ist kein für uC.net typischer Fred.
Flets schrieb: >>>> eines Atmega2560 Pro Mini Flets G. schrieb: > Und wenn mans so macht? Da ist aber kein Arduino Pro Mini zu sehen. Was denn nun?
Flets schrieb: > Ich hab bisher keine gescheite Antwort zu meiner Frage gefunden - brauch > ich dafür einen StepDown-Wandler auf 5V, wenn im uC selbst eh ein > Spannungsregler drin ist, der alles zwischen 6 und 9V akzeptiert? > Ich hab keine großen Anforderungen was die Leistung betrifft, der Servo > wird während des Fluges nur ein einziges Mal betätigt Flets G. schrieb: > Mann dass das so kompliziert ist > hätte ich nie gedacht Soo kompliziert ist es nun auch nicht. Es geht ja darum ob der Servo so viel Strom zieht dass er den 5V-Linearregler auf dem Arduino-Board überlastet und dem Microcontroller dabei den Saft abdreht. Und das könnte wohl der Fall sein, nicht nur beim Blockieren sondern schon beim Anlauf. Also ist die Antwort auf deine allererste Frage, dass es riskant wäre, den Servo rein über den 5V-Spannungsregler "im uC" zu betreiben. Dann stellt sich aber die nächste Frage, nämlich was man stattdessen macht. Eine Möglichkeit ist dein Schaltplan oben. Das wird wohl funktionieren. Andere Möglichkeiten hängen davon ab welches Arduino-Board du genau benutzt. Du schreibst von einem "Atmega2560 Pro Mini". Das ist ein eher ungewöhnliches Board (https://robotdyn.com/mega-2560-pro-mini-atmega2560-16au.html) mit sehr vielen Ports aber nur einem Linearregler und nur entweder als 3.3V oder als 5V-Version. Ist das wirklich das von dir gewählte? LG, Sebastian
Angehängte Dateien:




Hier noch vier Bilder aus einem Video vom Start meiner Wasserrakete. Das Video hat 25 Bilder pro Sekunde. Zu sehen sind Frames 0, 1, 6 und 11; zwischen Frame 1 und 6 und zwischen Frame 6 und 11 liegen also jeweils 0.2 Sekunden. Die Rakete ist 40cm lang. An der Leiter hängen zwei Zollstöcke, die sind aber kaum zu erkennen. LG, Sebastian
Lothar M. schrieb: > Flets G. schrieb: >> Wenn ich richtig gelesen habe dann liefert der AMS1117-5.0 ja 1 Ampere > Das Datenblatt hat nicht nur eine erste Seite... > > Und auf der Seite 3 findet sich dann:Current Limit min. 900mA - > typ. 1100mA - max. 1500mA Ich würde Lothar's Warnungen ernst nehmen... AMS1117 ist ein einfacher Bude wie seine Chinesische Geschwistern. und Minimum Werten gelten hier, die deutlich niedriger als was viele Hobbyisten hier denken... Eine Low Drop Linearregler (wirklich im xx mV Bereich) ist sicherer. Wenn nicht ein Buck-Regler... https://www.analog.com/en/products/power-management.html Ich weiß nicht wie hoch du gehen wirst.. Wenn ab 5km oder mehr, soll es richtig kalt da oben.. Also die Leistung und die "garantierte" Spezifikationen im Minus-Temp ist wichtig auch dann... Lothar M. schrieb: > Tim T. schrieb: >> Das wird wohl ... nicht wirklich relevant sein > Richtig, so nach "wird-wohl-Gefühl" werden heutzutage Steuerungen und > Komponenten entwickelt. Ich möchte nicht in einem Aufzug stecken, dessen > Steuerung auch mit so einem "wird-wohl-Gefühl" entworfen wurde. Ich teile die Meinung von Lothar 100%... Weder Aufzüge, noch Autos oder Industrie-Anlagen, Heizungen/Klimageräten, Leistungselektronik usw...
ElektroFH schrieb: > Ich weiß nicht wie hoch du gehen wirst.. Irgendwas im zweistelligen oder bestenfalls im untersten dreistelligen Meterbereich: https://de.wikipedia.org/wiki/Wasserrakete
Sebastian W. schrieb: > Soo kompliziert ist es nun auch nicht. Es geht ja darum ob der Servo so > viel Strom zieht dass er den 5V-Linearregler auf dem Arduino-Board > überlastet und dem Microcontroller dabei den Saft abdreht. Und das > könnte wohl der Fall sein, nicht nur beim Blockieren sondern schon beim > Anlauf. Also ist die Antwort auf deine allererste Frage, dass es riskant > wäre, den Servo rein über den 5V-Spannungsregler "im uC" zu betreiben. > Dann stellt sich aber die nächste Frage, nämlich was man stattdessen > macht. Flets schrieb: > mithilfe eines 2S-7,4V LiPo Franz M. schrieb: > Es gibt auch Servos, die direkt an 2 Zellen angeschlossen werden können. > ZB.https://www.robotshop.com/de/de/9g-micro-servomotor-74v.html Man benötigt überhaupt keinen Spannugsregler, wenn man ein geeignetes Servo, ähnlich dem verlinkten, wählt, was auch Gewichtsvorteile bietet.
Also die Masse meiner kleinen Elektroflieger ist über Jahre mit einem billigen Längsregler als Energielieferant ausgekommen, da hingen dann neben dem Empänger mindestens 2 Servos mit dran (BEC mit 5V 1A). Wenn Du mit einem Kondensator die Spitzen pufferst, dann ist das in Ordnung. Die Flugzeiten mit "Hochstromphasen" werden sehr, sehr überschaubar sein. Ansonsten hat hier im Forum vor längerer Zeit schon einmal etas zum SG90 geschrieben: Beitrag "SG90 maximal Strom"
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.