Hallo, Arduino nach WS2812B ist ja problemlos. Jetzt aber der Arduino NANO als Protokollempfänger und Auswertung, z.B. auf 12 Ausgänge des Arduinos. Dateneingang auf Pin2 oder 3. Ist das machbar? Edit: Oder ESP32 Mini D1 Danke
Machbar ist das sicherlich, man muss ja nur das Protokoll mitlauschen. Aber wozu? Einfacher wäre es doch an der Datenquelle einzugreifen.
Zumal doch jede WS2812B "ihre" Daten vom Beginn des Datenstroms entfernt und nur den Rest weitergibt (nach meinem Verständnis). Dann käme beim empfangenden Arduino nur das an, was der steuernde Arduino zusätzlich schickt, was also von keiner der vorhandenen WS2812B beachtet wurde.
Der Arduino soll am letzten WS2812B angeschlossen werden und verschiedene Schaltvorgänge realisieren. Im einfachsten Falle, ein Byte zur Portausgabe. Keine Weiterleitung des Datenstroms.
Ich würde es wenn es unbedingt sein muss mit einem ESP und der RMT Perepherie probieren: https://docs.espressif.com/projects/esp-idf/en/latest/esp32/api-reference/peripherals/rmt.html Dann brauchst du erst nach der Idle RX Erkennung den Prozessor und hast Zeit den durch die Perepherie erfassten Datenstrom zu zerlegen. Die restliche Zeit kann er vermutlich in den Sleep. Wobei dann die Frage ist warum du bei einem ESP nicht einfach WLAN/BT verwendest?
Ich könnte mir vorstellen, dass es für einen Atmega bassierten Arduino vom Timing her schwierig werden könnte. Ein ESP sollte es von der Rechenleistung und Peripherie schaffen. Da die WS2812 Signale pulslängenkodiert sind, könnte man die einzelnen Impulse vielleicht damit vermessen: https://www.arduino.cc/reference/en/language/functions/advanced-io/pulsein/
Al. K. schrieb: > Der Arduino soll am letzten WS2812B angeschlossen werden und > verschiedene Schaltvorgänge realisieren. > Im einfachsten Falle, ein Byte zur Portausgabe. > Keine Weiterleitung des Datenstroms. Ist machbar, wenn gleich nicht rein per "Arduino IDE, da muss man wohl mit Assembler ran. GGf. mit ein wenig Hardware, welche die Pulsdekodierug macht, dann wird es entspannter. Mittels Monoflop die Pulsbreite messen und auf der fallenden Flanke abtasten bzw. speichern. Aber alles in allem ist das eher ein Krampf. Eine einfache UART-Verbindung ist 100x einfacher, selbst bei hohen Baudraten.
Markus schrieb: > Ich könnte mir vorstellen, dass es für einen Atmega bassierten Arduino > vom Timing her schwierig werden könnte. > Ein ESP sollte es von der Rechenleistung und Peripherie schaffen. Ich true das einem Atmega locker zu. Beim ESP könnte hingegen das Betriebssystem (die WLAN Teile) stören. Da läuft dein eigenes Programm nicht ruckelfrei kontinuierlich durch und Interrupt Routinen werden nicht immer sofort ausgeführt.
Stefan ⛄ F. schrieb: > Ich true das einem Atmega locker zu. Ja, das kann er (angenommener Systemtakt 16Mhz). Aber es wird eng. Wenn nebenbei noch was anderes interruptgesteuert laufen soll (was in der konkreten Anwendung, soweit beschrieben, allerdings nicht der Fall ist), wird es sogar sehr eng. Da muss man schon ganz ordentlich "tricksen", um das zuverlässig hinzubekommen.
>Ja, das kann er (angenommener Systemtakt 16Mhz).
Jetzt wo Ihr's erwähnt: Ich würde sagen, das geht auch in C mit Polling
und direkter Pinabfrage. Die Interrupts kann man vorher mit CLI();
blockieren.
Der Compiler wird so gut sein und die paar Befehle optimieren.
Markus schrieb: >> Ja, das kann er (angenommener Systemtakt 16Mhz). > > Jetzt wo Ihr's erwähnt: Ich würde sagen, das geht auch in C mit Polling > und direkter Pinabfrage. Die Interrupts kann man vorher mit CLI(); > blockieren. > Der Compiler wird so gut sein und die paar Befehle optimieren. Denk ich auch. Ein Bit ist 1,2us lang. Man pollt z.B. immer bis zur fallenden Flanke, wartet dann bis zur Mitte des Bits, und wertet dann den Portstatus aus. Oder man benutzt ICP1. Für ganz wenige Bits könnte man vielleicht auch die UART missbrauchen. LG, Sebastian
Könnte man vielleicht mit einem Timer/PWM die Clock fürs SPI erzeugen? Angelehnt an den "one-shot Modus" der AVR Timer.
B. W. schrieb: > Könnte man vielleicht mit einem Timer/PWM die Clock fürs SPI erzeugen? Im Master Modus kann der ATmega328 den SPI Takt nur vom System-Oszillator (mit Vorteiler) ableiten. Im Slave Modus muss der Takt extern zugeführt werden. Diesen Eingang kann man bestimmt auch mit dem Ausgang eines Timers verbinden, aber wie synchronisierst du den Takt dann mit dem Signal? Außerdem glaube ich, dass du immer 8 Takte brauchst, vorher gibt es für die Software kein Bytes zum Auslesen.
Angehängte Dateien:
-

WS2812-receive.png
5,7 KB
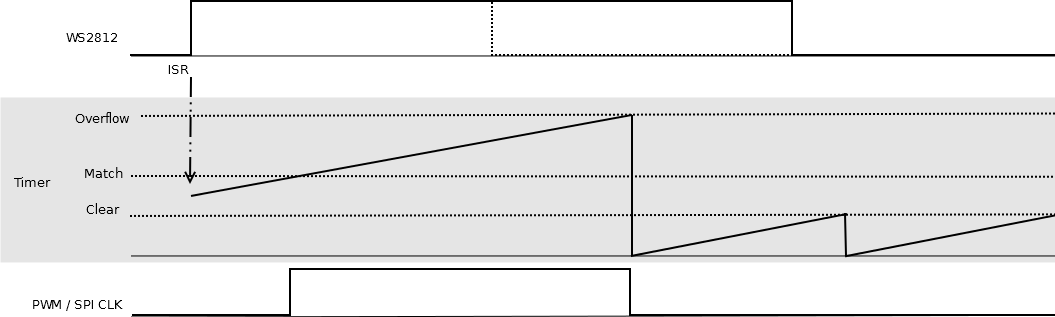
Auf die Steigende Flanke vom WS2812 Signal ein Interrupt setzen. Im ISR dann einen Startwert vom Timer setzen. Mit dem Timer im PWM dann die CLK fürs SPI erzeugen lassen. Clear wird benutzt, damit der Timer nur einmal läuft. Hmm... vielleicht übersehe ich da gerade auch etwas. Stefan ⛄ F. schrieb: > Außerdem glaube ich, dass du immer 8 Takte brauchst, vorher gibt es für > die Software kein Bytes zum Auslesen. Da das Protokoll vom WS2812 Byte-orientiert ist, seh ich da noch nicht mal ein Problem drin,
B. W. schrieb: > Hmm... vielleicht übersehe ich da gerade auch etwas. Ich denke das dauert zu lange. Bedenke dass die ISR nicht immer sofort aufgerufen wird und einige Takte braucht, um den Stack zu beschreiben. Wenn das die Einzige Aufgabe wäre, dann geht das vielleicht noch. Aber du brauchst mindestens noch eine Timeout Erkennung, sonst kommst du mit dem Zählen der Bits rasch durcheinander.
Stefan ⛄ F. schrieb: > Außerdem glaube ich, dass du immer 8 Takte brauchst, vorher gibt es für > die Software kein Bytes zum Auslesen. Das wäre kein Problem. Das Problem ist vielmehr, dass die SPI-Einheit nicht gepuffert ist. Wenn überhaupt, geht's mit der UART im SPI-Master-Modus. Dann entfällt auch das Geraffel mit dem Timer, die UART versorgt sich selber mit einem Takt. Dass der SPI-Takt dann natürlich nicht synchron mit den Daten ist, muss man halt dadurch ausgleichen, dass man höherer Bitrate abtastet, das zehrt aber natürlich einen Teil des gewonnenen Vorteils gleich wieder auf. Ich denke mal, man bräuchte mindestens 4x den Takt der der WS28xx-Datenstrippe, um das hinreichend gut abzutasten, also 3,2MHz SPI-Takt. Die Interrupts würden dann mit 3.2M/8=400kHz erfolgen, bei 16MHz hätte man also bis zu 32 Nutztakte für jede ISR und durch die Doppel-Pufferung der UART könnte eine Latenz von bis zu ca. 5µs ausgeglichen werden, jedenfalls so lange sie nur verhältnismäßig selten auftritt. Also in Asm auf jeden Fall machbar. Arbeitintensiv ist dabei vor allem der Decoder, der das asynchron gelesene Gesülze in Bits übersetzt. Das Ding müßte ziemlich sicher tabellenbasiert sein, sonst gibt es wohl keine Chance, das in unter 32 Takten abzufackeln. Zum Glück hat der Arduino 32k Flash, da passt einiges an Tabellen rein. Nur müssen sie halt erstmal "konstruiert" werden. Al. K. traue ich das keinesfalls zu...
c-hater schrieb: > Zum Glück hat der > Arduino 32k Flash, und es gibt mehr als einen Nachbau Arduino ATmega1284p 128k flash z.B. Bobuino mighty mini 1284p Original Arduino ATmega2560 256k flash
Hallo, habe natürlich alles verfolgt und es ist recht interessant. Ich habe seit 20 Jahren ASM Programmierung aufgegeben und möchte mir das nicht mehr antun. Damals war DMX für die Band aktuell. In den 80 zigern der U880. Habe jetzt mal auf die schnelle 8 WS2812B angesteuert. Mit vorhandenen Lib. Wenn ich den Daten Steuereingang Abschalte bleiben die Lichtmuster erhalten. Sende ich nur für 7 LEDs , kann ich die Lichtmuster ändern ohne das die achte Led beeinflusst wird. Das bedeutet, wenn ich jetzt 9 Leds definiere und anspreche, das nur 3 Byte aus dem letzten Led Datenausgang ausgewertet werden müssen. Oder eben nur ein Byte um es einfacher zu machen. Mit dem ESP32 bei abgeschalteten Wifi und Bluetooth, sollte es doch dann möglich sein dies auszuwerten. ,,mit der Arduino IDE. Die Bitlänge könnte doch mit einen Monoflop selektiert werden, wie oben schon geschrieben. Wenn jetzt noch ein 8Bit Schieberegister eingesetzt wird könnte es noch einfacher werden. Ohne den Geraffele wäre es natürlich besser. MfG alterknacker
Das einfachste wird sein das IC WS2811 zu nehmen, dann hat man 3x PWM pro Chip der wenige ct. kostet. Das gibt es sogar schon ausgegoren für Modellbahn Anwendungen: https://wiki.mobaledlib.de/
Johannes S. schrieb: > Das einfachste wird sein das IC WS2811 zu nehmen, dann hat man 3x PWM > pro Chip der wenige ct. kostet. Hat der das gleiche Protokoll, so das man es einfach zwische/anhängen kann?
das ist afaik der gleiche Chip wie in den LED, nur eben ohne LED. Muss man sich mal durch die genannte Website hangeln.
Al. K. schrieb: > Hat der das gleiche Protokoll Johannes S. schrieb: > das ist afaik der gleiche Chip wie in den LED hey keine Fakenews! 1. WS2812B Nur Data, eine Leitung in DI und eine raus DO zu +5V und GND 2. WS2811 Din & CLKin sowie Dout & CLKout zu weiteren Chips Wie dann die einzelne LED ist müsste aus der PWM ergründet werden. Einziger Vorteil, es gibt ein Clk den man nutzen kann, falls das überhaupt ein Vorteil ist denn man muss den CLK bei der WS2812B raten wissen oder sonst was, die Toleranz ist riesig groß, ob in der WS2812B nun 800kHz eingehalten wird weiss niemand, könnte man aber nach den Bits ausknobeln.
Johannes S. schrieb: > das ist afaik der gleiche Chip wie in den LED, nur eben ohne LED. Muss > man sich mal durch die genannte Website hangeln. Werde ich mal machen. Bei Am..relativ teuer! Joachim B. schrieb: > hey keine Fakenews! Dann passen die nicht zusammen!
Joachim B. schrieb: > 2. WS2811 Din & CLKin sowie Dout & CLKout zu weiteren Chips http://www.led-studien.de/datasheet/WS2811.pdf da sehe ich keinen getrennten clk und Datenpin. bei eBay in kleinen Mengen ca. 30 ct./Stück, bei Ali ca 8€ für 100 Stück. Ja, verdammt teuer.
Joachim B. schrieb: > 2. WS2811 Din & CLKin sowie Dout & CLKout zu weiteren Chips Hast du mal das Datenblatt dazu?
Al. K. schrieb: > Da bestellt mein Kumpel nicht, nur AMA.. aber sonst gehts noch? Ich habe wirklich lange überlegt die Tipps zu posten, du machst deinem Namen wieder alle Ehre.
Johannes S. schrieb: > Ich habe wirklich lange überlegt die Tipps zu posten, du machst deinem > Namen wieder alle Ehre. ..jeder hat seine Prinzipien, das hat mit dem fachlichen nichts gemein.
Johannes S. schrieb: > Das einfachste wird sein das IC WS2811 zu nehmen, dann hat man 3x PWM > pro Chip der wenige ct. kostet. Das nützt aber nix, denn der OP will ja das 8 Bit Wort im AVR haben, umd damit irgendwas zu machen. Man kann es vermutlich per ASM im AVR hinkriegen, aber das ist schon sportlich. Man kann es aber auch zumindest in Hardware vorverarbeiten. Dazu könnte ein Monoflop reichen, das die Bits dekodiert und per Flanke zur Verfügung stellt. Man kann das auch in einem extra AVR, z.B. ATtiny2313 machen, der dann die 8 Bits parallel ausgibt und per Handshake an den "echten" Empfänger weitergibt. So eine Art WS2812 UART. In einem CPLD wäre das einfach, ein paar Zähler und ne State machine. Aber das ist deutlich mehr Hard- und Softwareaufwand. Wer die sportlich Herausforderung liebt, kann das machen. Wer ein paraktisches Problem lösen will, nimmt normales UART.
Falk B. schrieb: > Man kann das auch in einem extra AVR, z.B. > ATtiny2313 machen, der dann die 8 Bits parallel ausgibt und per > Handshake an den "echten" Empfänger weitergibt. > So eine Art WS2812 UART. So in der Art dachte ich mir das auch. Man könnte die Daten auch seriell ausgeben (fire and forget), die UART/USI arbeitet ja von ganz alleine.
B. W. schrieb: > Hast du mal das Datenblatt dazu? https://www.alldatasheet.com/datasheet-pdf/pdf/1132633/WORLDSEMI/WS2811.html selber suchen wäre nett! aber bei der Suche fiel mir auf das ich WS2811 mit WS2801 verwechselte der WS2801 hat Data und Clock, der WS2811 nur Data, sollte also doch passen, nur wozu? Wer wirklich für jede LED den Dimmstatus auswerten will muss parallel alle Daten aufzeichnen. Es fällt mir kein Szenario ein wozu man diesen Chip am Ende einer WS2812B Kette brauchen soll!
Sascha R. schrieb: > Daten vom Beginn des Datenstroms entfernt und nur den Rest weitergibt Wäre es eventuell denkbar, dass der "Rest" nach der letzten LED ein anderes Datenformat ist, dass einfacher auszuwerten ist, aber trotzdem weitergeleitet wird... Nur so eine Überlegung... Gruss Chregu
Christian M. schrieb: > Wäre es eventuell denkbar ... Nein. Die LEDs sind ja gerade dazu gemacht, dass man sie miteinander verketten kann. Eingang und Ausgang "sprechen" das gleiche Übertragungsprotokoll.
Stefan ⛄ F. schrieb: > Nein OK. Ich dachte nur, wenn man nach der letzten LED ein anderes Protokoll reinwürgt, wird das dann ausgegeben? Gruss Chregu
Ich könnte mir vorstellen, dass das funktioniert. Die WS2812 werden, nachdem sie ihre Daten empfangen haben, den Eingang auf den Ausgang weiter leiten, bis 50us L-Pegel einen Reset einleiten. So könnte man unter Vermeidung dieser Zeit auch ein (invertiertes) UART-Signal durchschicken.
Christian M. schrieb: > Ich dachte nur, wenn man nach der letzten LED ein anderes Protokoll > reinwürgt, wird das dann ausgegeben? Wie willst du denn in den Ausgang der letzten LED etwas "rein würgen"? Das ist ein Ausgang, kein Eingang.
Stefan ⛄ F. schrieb: > Wie willst du denn in den Ausgang der letzten LED etwas "rein würgen"? > Das ist ein Ausgang, kein Eingang. Mario M. schrieb: > Die WS2812 werden, nachdem sie ihre Daten empfangen haben, den Eingang > auf den Ausgang weiter leiten, bis 50us L-Pegel einen Reset einleiten. Gruss Chregu
Stefan ⛄ F. schrieb: > Wie willst du denn in den Ausgang der letzten LED etwas "rein würgen"? > Das ist ein Ausgang, kein Eingang. Christian M. schrieb: > Mario M. schrieb: >> Die WS2812 werden, nachdem sie ihre Daten empfangen haben, den Eingang >> auf den Ausgang weiter leiten, bis 50us L-Pegel einen Reset einleiten. So einfach geht das nicht. Die Chips leiten das Signal nicht einfach 1:1 durch sondern dekodieren es und erzeugen es neu. Deswegen muss man sich da schon ans Übertragungsprotokoll halten. Ohne diese Aufbereitung des Signal wäre es nicht möglich, unendlich viele dieser LEDs hintereinander zu schalten.
Al. K. schrieb: > Habe jetzt mal auf die schnelle 8 WS2812B angesteuert. > Mit vorhandenen Lib. > Wenn ich den Daten Steuereingang Abschalte bleiben die Lichtmuster > erhalten. > Sende ich nur für 7 LEDs , kann ich die Lichtmuster ändern ohne das die > achte Led beeinflusst wird. > > Das bedeutet, wenn ich jetzt 9 Leds definiere und anspreche, das nur 3 > Byte > aus dem letzten Led Datenausgang ausgewertet werden müssen. > Oder eben nur ein Byte um es einfacher zu machen. Ist meine Schlussfolgerung richtig? Wenn ich also 12 LEDs definiere bei 8 LEDs extern werden 4*3 Byte aus dem 8 LED Ausgang geschickt?
Al. K. schrieb: > Ist meine Schlussfolgerung richtig? Ja ist richtig. Schau doch einfach mal ins Datenblatt der WS2812, da steht das drin.
Stefan ⛄ F. schrieb: > Ja ist richtig. Schau doch einfach mal ins Datenblatt der WS2812, da > steht das drin. Wenn ich durch logische Schlussfolgerungen auf ein Ergebnis komme, was sich dann auch bestätigt, dann bin ich richtig Stolz auf mich und kann mir ständig auf die Schulter klopfen. ;--)))
Stefan ⛄ F. schrieb: > So einfach geht das nicht. Die Chips leiten das Signal nicht einfach 1:1 > durch sondern dekodieren es und erzeugen es neu. Deswegen muss man sich > da schon ans Übertragungsprotokoll halten. Ja. Allerdings "regenerieren" die WS28xx nicht wirklich das gesamte Timing (dazu müssten sie die Daten buffern), sondern nur die beiden Zeiten T0H und T1H. Die Zykluszeit hat hingegen weitgehend derjenigen unter Kontrolle, der den Kram ansteuert, so lange er nur weit genug weg bleibt von Trst. D.h.: das Konzept von Mario M. geht grundsätzlich und ist bezüglich der Verringerung der Anforderungen an den Empfänger so dermaßen attraktiv, das es sehr wohl lohnt, weiter darüber nachzudenken. Wenn man das Signal hardwaremäßig invertiert, bevor es RXD des Empfänger-Arduino erreicht, ist die Sache sogar ziemlich einfach umzusetzen. Voraussetzung ist halt nur, dass man auf der Arduino auf der Sendeseite auch für eine konstante Zykluszeit der WS28xx-Bits sorgt. Das ist bei Timerhardware-basierten Umsetzungen des WS28xx-Protokolls kein Problem. Bei in C hingepfuschtem Bitbanging natürlich schon...
c-hater schrieb: > Das ist bei Timerhardware-basierten Umsetzungen des WS28xx-Protokolls > kein Problem. Bei in C hingepfuschtem Bitbanging natürlich schon... Es gibt auch Libs mit ASM ;-) Beitrag "Re: Frage zu IR-Remote+LED-Strips an AVR"
Falk B. schrieb: > Es gibt auch Libs mit ASM ;-) > > Beitrag "Re: Frage zu IR-Remote+LED-Strips an AVR" OK, man kann natürlich in jeder Sprache pfuschen. In Assembler allerdings könnte man zumindest AUCH auch mit Bitbanging REPRODUZIERBAR konstante Zykluszeiten umsetzen...
Joachim B. schrieb: > selber suchen wäre nett! Hab ich... hab aber vermutet, das es sich um 2 unterschiedliche Chips mit der selben Bezeichnung handeln könnte. Joachim B. schrieb: > aber bei der Suche fiel mir auf das ich WS2811 mit WS2801 verwechselte Aber gut, das sich das geklärt hat.
c-hater schrieb: > .h.: das Konzept von Mario M. geht grundsätzlich und ist bezüglich der > Verringerung der Anforderungen an den Empfänger so dermaßen attraktiv, > das es sehr wohl lohnt, weiter darüber nachzudenken. Bei genauerer Betrachtung scheinen die Teile wirklich eine Statemachine mit eigenem Takt zu haben, was ein Abweichen vom vorgesehenen Protokoll zumindest erschwert. https://cpldcpu.wordpress.com/2014/01/14/light_ws2812-library-v2-0-part-i-understanding-the-ws2812/
Mario M. schrieb: > Bei genauerer Betrachtung scheinen die Teile wirklich eine Statemachine > mit eigenem Takt zu haben, was ein Abweichen vom vorgesehenen Protokoll > zumindest erschwert. Haben sie. Aber effektiv tun sie halt nur eins: T0H und T1H in den Daten möglichst sauber separiert zu halten (also die kurzen High-Pulse, deren Dauer die eigentliche Information ist). Für mehr Eingriffsmöglichkeiten fehlt der Statemachine der Hardware-Wumms, eben ein Buffer. Und weil das so ist, kontrolliert der Sender immer die Bit-Zykluszeit. Zumindest bis zu der Grenze, die Trst setzt. Sprich: ein T0L oder T1L, welches Trst erreicht, mutiert zu einem tatsächlichen Reset der LED, die ihn erkannt hat (und aller folgenden LEDs).
..zu meinen Verständnis: wenn ich einen Sender generiere welchen nach Ausgabe eines H Pegels am pin welcher zum DI der Leds geht. Danach Treset als Low >=50 ys ausgebe danachfolgt 24 mal ein TOH (0,35yS) oder T1H (0,7yS) Impuls, gefolgt von dem L Pegel von >2yS 50yS< um die 3 Farbbytes R/G/B zu füllen. Das könnte man vielleicht mit der IDE zu Fuß programmieren.
c-hater schrieb: > OK, man kann natürlich in jeder Sprache pfuschen. In Assembler > allerdings könnte man zumindest AUCH auch mit Bitbanging > REPRODUZIERBAR konstante Zykluszeiten umsetzen... Bist du blind oder auf Entzug? Das ist taktgenau reproduzierbar!
Al. K. schrieb: > Der Arduino soll am letzten WS2812B angeschlossen werden und > verschiedene Schaltvorgänge realisieren. > Im einfachsten Falle, ein Byte zur Portausgabe. > Keine Weiterleitung des Datenstroms. Hier eine kleine Anregung. Ich wollte sehen, ob ich das mit einem Attiny hinkriege. Obwohl das ja eigentlich gar nicht funktionieren kann, weil das ein AVR ist und nicht in Assembler programmiert ist, bin ich mir immer noch sicher, daß das funktioniert hat. Ist aber schon ein paar Jahre her. Was nicht funktionierte, ist das Weiterleiten an einen nachfolgenden WS2812. Ein weiterer WS25 funktionierte allerdings. Glaube ich. Wie schon gesagt, ist etwas länger her. Aber dein Controller soll ja auch der letzte in der Reihe sein. Die erste while-Schleife dekodiert die Daten, die zweite leitet das, was danach kommt, weiter. Danach werden dann die Bits sortiert und in die PWM-Register geschrieben. Wenn man sie stattdessen auf einen Port schreibt, sollte das das sein, was du machen willst. Dass die Delay-Zeiten gar nicht so zum WS2812-Timing passen, liegt daran, dass die Latenzen der jeweiligen Schleifen auch ihren Anteil liefern.
Was macht der Compiler denn aus _delay_us(0.1)? Ein NOP? Oder zwei? LG, Sebastian
Falk B. schrieb: > Bist du blind oder auf Entzug? Das ist taktgenau reproduzierbar! Mal behauptet er, dass der gcc das Programm aus immer gleichen vorgefertigten Bausteinen zusammenfügt, an anderen Tagen behauptet er, dass der gcc zufälligen Code erzeugt. Das ist halt seine Rolle, die er hier spielt: Null Ahnung vortäuschen und maximal lästern. Leider schnallt er nicht, dass er der einzige ist, der das unterhaltsam findet.
Falk B. schrieb: > c-hater schrieb: >> OK, man kann natürlich in jeder Sprache pfuschen. In Assembler >> allerdings könnte man zumindest AUCH auch mit Bitbanging >> REPRODUZIERBAR konstante Zykluszeiten umsetzen... > > Bist du blind oder auf Entzug? Das ist taktgenau reproduzierbar! Naja, genau das sagte ich doch: in Asm geht das prinzipiell, in C prinzipiell nicht. Ich verstehe dein Problem nicht. Ah, jetzt ja: Du hast meine Aussage auf den konkret geposteteten Asm-Code bezogen. Nein, war sie nicht. Den hatte ich mir nicht einmal angeschaut, weil für mich uninteressant. WS28xx steuere ich seit vielen Jahren an, mit meinem eigenen Code. Der allerdings je nach Target und konkreten Anforderungen der Anwendung durchaus massiv variiert. Von Bitbanging über Timer, USART(SPI), USART(native) bis hin zum USI und den SPIs der 441/841 habe ich alles schonmal gebraucht und umgesetzt.
Stefan ⛄ F. schrieb: > Mal behauptet er, dass der gcc das Programm aus immer gleichen > vorgefertigten Bausteinen zusammenfügt Das macht er definitiv. So arbeiten Compiler nunmal, der GCC ist da keine Ausnahme. > an anderen Tagen behauptet er, > dass der gcc zufälligen Code erzeugt. Das habe ich nirgendwo behauptet. Er erzeugt nur bezüglich des Timingverhaltens unvorhersehbaren Code. Weil von Version, Optimierungseinstellungen und Kontext abhängig. > Das ist halt seine Rolle, die er hier spielt: Null Ahnung vortäuschen > und maximal lästern. Leider schnallt er nicht, dass er der einzige ist, > der das unterhaltsam findet. Labersack.
>> dass der gcc das Programm aus immer gleichen >> vorgefertigten Bausteinen zusammenfügt c-hater schrieb: > Das macht er definitiv. Ja, du hast Recht. Und jetzt geh wieder spielen.
Angehängte Dateien:
-

Skizze_Ansteuerung.jpeg
48 KB
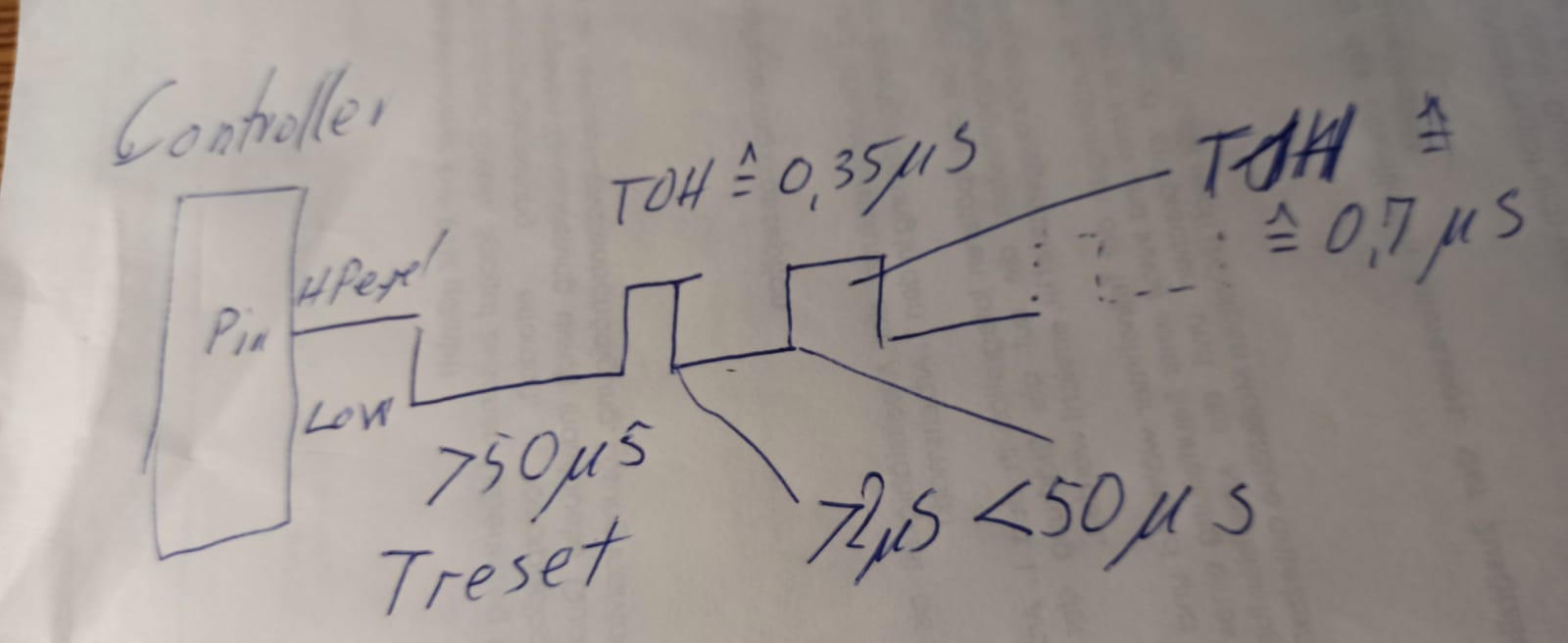
Al. K. schrieb: > ..zu meinen Verständnis: > wenn ich einen Sender generiere welchen nach Ausgabe eines H Pegels am > pin > welcher zum DI der Leds geht. > Danach Treset als Low >=50 ys ausgebe > danachfolgt 24 mal ein TOH (0,35yS) oder T1H (0,7yS) Impuls, gefolgt von > dem > L Pegel von >2yS 50yS< um die 3 Farbbytes R/G/B zu füllen. > > Das könnte man vielleicht mit der IDE zu Fuß programmieren. wenn nicht muss ich vielleicht doch noch ein bissel ASM versuchen. Habe noch genug Pics und AVRs rumliegen. ..aber erst mal mit der IDE!
Al. K. schrieb: > wenn nicht muss ich vielleicht doch noch ein bissel ASM Mann kann auch ein paar Zeilen Assembler in C einbetten, wenn es sein muss.
Stefan ⛄ F. schrieb: > Mann kann auch ein paar Zeilen Assembler in C einbetten, wenn es sein > muss. Habe ich bis jetzt über 20 Jahre erfolgreich vermieden.;-)) Ist mein Verständnis vom Sende Protokoll richtig?
Al. K. schrieb: > Ist mein Verständnis vom Sende Protokoll richtig? Das exakte Timing wurde in der Vergangenheit mehrfach geändert. Ich habe dort beschrieben, wie ich es heute implementieren würde, um zu allen Varianten kompatibel zu sein: http://stefanfrings.de/mikrocontroller_buch/Einstieg%20in%20die%20Elektronik%20mit%20Mikrocontrollern%20-%20Band%202.pdf#page=82
@Stefan Zitat: Nachdem alle LEDs ihre Helligkeitswerte erhalten haben, halte die Daten-Leitung für mindestens 280 μs auf LOW. In diesem Moment ändert sich die Helligkeit aller LEDs auf den vorher festgelegten Wert. Du sendest sofort die Bitinformtion und danach machst du Reset/Pause von mindestens 280 μs auf LOW.
Al. K. schrieb: > Du sendest sofort die Bitinformtion und danach machst du Reset/Pause > von mindestens 280 μs auf LOW. Ja. Ist daran etwas falsch? Oder warum sonst hast du den Satz zitiert?
Stefan ⛄ F. schrieb: > Ja. Ist daran etwas falsch? Oder warum sonst hast du den Satz zitiert? Weil ich immer dachte das zuerst der TResetimpuls gesendet wird. Ich beschäftige mich seit über einen Jahr jetzt etwas ernsthafter mit diesen Teilen. MfG
Al. K. schrieb: > Weil ich immer dachte das zuerst der TResetimpuls gesendet wird. Laut Datenblatt dient der Reset dazu, die übertragenen Werte in die internen PWM Timer zu übertragen. Mit einem Initialen Reset wie beim Mikrocontroller hat das nichts zu tun. Ich finde den Begriff "Reset" an dieser Stelle deswegen auch ziemlich irreführend. Dass man nach dem Einschalten der Stromversorgung eine gewisse Zeit lang warten muss, sollte klar sein. Dafür sorgt ja normalerweise schon die interne Reset-Schaltung im steuernden Mikrocontroller. Ist dir aufgefallen, dass ich einen "1" Impuls etwas länger als 0,7 µs mache? Ich habe das aus den Datenblättern vom WS2812 und WS2812B v1 bis v5 abgeleitet.
Habe ein wenig mit dem ESP32 experimentiert, mit der Arduino IDE digitalWrite(DatOut,HIGH); 116 ns digitalWrite(DatOut,LOW); 116 ns Davon habe ich alles ableiten können. Jedenfalls kann ich die LEDs definiert ansteuern. Bis jetzt nur Vollfarben. Morgen vielleicht mal eine Funktion machen mit Übergabe der Led Nr. und der Farbwerte. MfG alterknacker
Al. K. schrieb: > Jedenfalls kann ich die LEDs definiert ansteuern. Ja ja, Du wolltest aber: Al. K. schrieb: > Jetzt aber der Arduino NANO als Protokollempfänger und Auswertung Gruss Chregu
Christian M. schrieb: > Ja ja, Du wolltest aber: > > Al. K. schrieb: >> Jetzt aber der Arduino NANO als Protokollempfänger und Auswertung Das ist vielleicht erst möglich wenn das Sendeprotokoll vollständig mit seinen Grenzen verständlich ist. Es scheint so das ich das ohne Assembler Einbindung nicht hinbekomme. Wenn ich einen WS2811 und Arduino dranhänge bekomme ich das mit der IDE hin, wird eben ein wenig langsamer. MfG
Angehängte Dateien:
-

NEOLEDSender.png
590 KB -

NeoPixelLastBits.png
42 KB
Eigentlich wollte ich ja was anderes machen ... da ich aber gerade Lust zum Basteln habe: Hier mal die Signale am Ende der NEOPixel-Kette.
1 | /*
|
2 | *
|
3 | * Sender for NeoPixel stripe
|
4 | * last LED is used as data container (24bit)
|
5 | *
|
6 | * 21.11.2021 chris_
|
7 | *
|
8 | */
|
9 | #include <Adafruit_NeoPixel.h> |
10 | #ifdef __AVR__
|
11 | #include <avr/power.h> |
12 | #endif
|
13 | |
14 | #define PIN 6
|
15 | |
16 | #define NUMPIXELS 12
|
17 | |
18 | // NUMPIXEL increase by 1 because last pixel is the data transmission message
|
19 | Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS + 1, PIN, NEO_GRB + NEO_KHZ800); |
20 | |
21 | |
22 | void setup() |
23 | {
|
24 | pixels.begin(); |
25 | }
|
26 | |
27 | |
28 | void loop() |
29 | {
|
30 | static uint8_t ledPos = 0; |
31 | static uint32_t data = 0; // data to be tranmitted after the last pixel (only 24bits available) |
32 | |
33 | for (int n = 0; n < NUMPIXELS; n++) |
34 | {
|
35 | if (ledPos == n) pixels.setPixelColor(n, pixels.Color(0, 150, 0)); |
36 | else pixels.setPixelColor(n, pixels.Color(0, 0, 0)); |
37 | }
|
38 | const uint8_t dataPos = NUMPIXELS; |
39 | |
40 | pixels.setPixelColor(NUMPIXELS, data); |
41 | pixels.show(); |
42 | |
43 | |
44 | data++; // increase test data transmittet after last LED |
45 | |
46 | // NeoPixel Lauflicht
|
47 | ledPos++; |
48 | if (ledPos >= NUMPIXELS)ledPos = 0; |
49 | |
50 | delay(20); |
51 | }
|
chris_ schrieb: > Eigentlich wollte ich ja was anderes machen ... da ich aber gerade Lust > zum Basteln habe: [...] Der Herr bewahre mich vor Ardui... Wenn du was dazulernen oder kompetent zum Thema dieses Threads beitragen willst, dann musst du dir anschauen, was pixels.show() im Detail tut. Da tun sich erst die Probleme auf, um die es hier geht. Das ist garnicht so schwer: der Quelltext liegt auf deiner HD/SSD. Du musst ihn dir nur anschauen und verstehen, was da passiert...
Al. K. schrieb: > Das ist vielleicht erst möglich wenn das Sendeprotokoll vollständig > mit seinen Grenzen verständlich ist. Wie Stefan F. korrekt angemerkt hat, gab es dazu im Laufe der Jahre diverse Updates der Specs. Tatsächlich relevant sind aber nur genau zwei Sachen (eigentlich die Grenze, die jeweils dazwischen liegt): T0Hmax vs. T1Hmin TxLmax vs. Trst die allerdings gerade nicht in den Specs stehen. Wahrscheinlich war der Hersteller hier der Meinung, dass dadurch sein "hochinnovatives" intellectual property leaken würde... > Tatsächlich > > Es scheint so das ich das ohne Assembler Einbindung nicht hinbekomme. Unter Zuhilfenahme von Peripherie ist das auch in C möglich. Senden ist deutlich einfacher als Empfangen (immer). Das würde dann auch das Senden mit konstanter Bitzeit ermöglichen, was wiederum die Voraussetzung ist, dass dann auch für den Empfänger auch eine Lösung in C möglich wird. Auch hier wieder, indem die Peripherie benutzt wird. Der Trick ist also im Wesentlichen immer, vorhandene Peripherie sinnvoll zu benutzen. Das ist allerdings gegen dieses idiotische Arduino-Konzept, wo jeder Pin nach Möglichkeit alles können soll... Sprich: Mit Bitbanging hast du keine Chance, das umzusetzen, was du erreichen willst.
c-hater schrieb: > Das ist allerdings gegen dieses idiotische Arduino-Konzept, > wo jeder Pin nach Möglichkeit alles können soll... Auch wenn du mit Sicherheit auf deinem hohen Roß begraben wirst, dein Bashing kannst du dir echt mal klemmen. Die Leute die Arduino Libs programmieren sind nicht alle Vollpfosten und viele Libs sind über die Zeit auch durch die Community verbessert worden. Arrogante Einzelkämpfer sitzen da heute auf dem absterbenden Ast. Das einzig richtige war die Anmerkung das die Quellen der Arduino Libs frei verfügbar sind. Und wenn man da reinschaut, sieht man das die Adafruit Neopixel sehr wohl targetspezifische Implementierungen hat. Beim ESP32 wird das RMT verwendet, beim RP2040 die PIO.
Angehängte Dateien:
-

NeoPixelLastBits2.png
40 KB
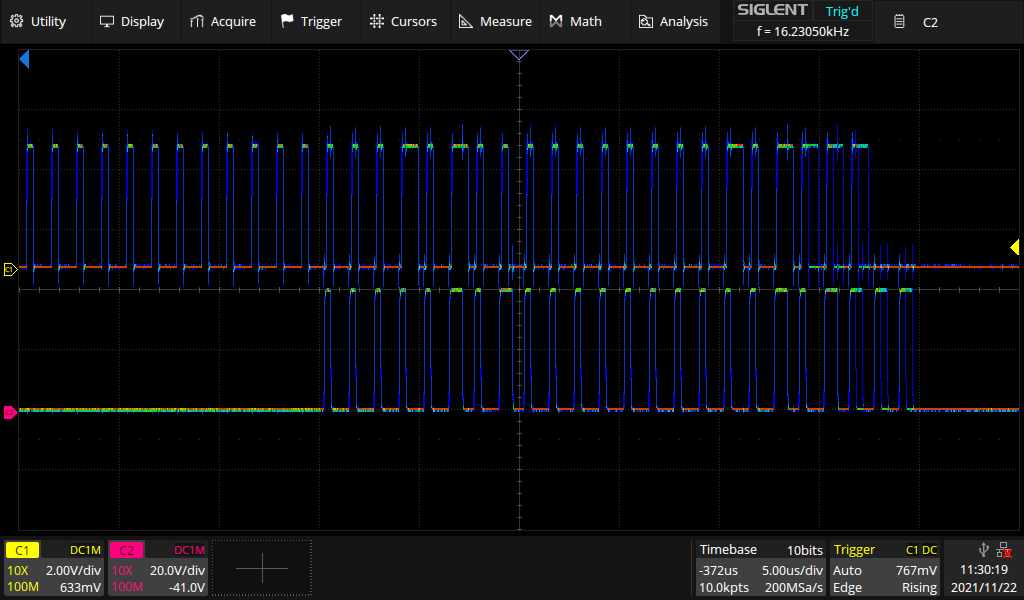
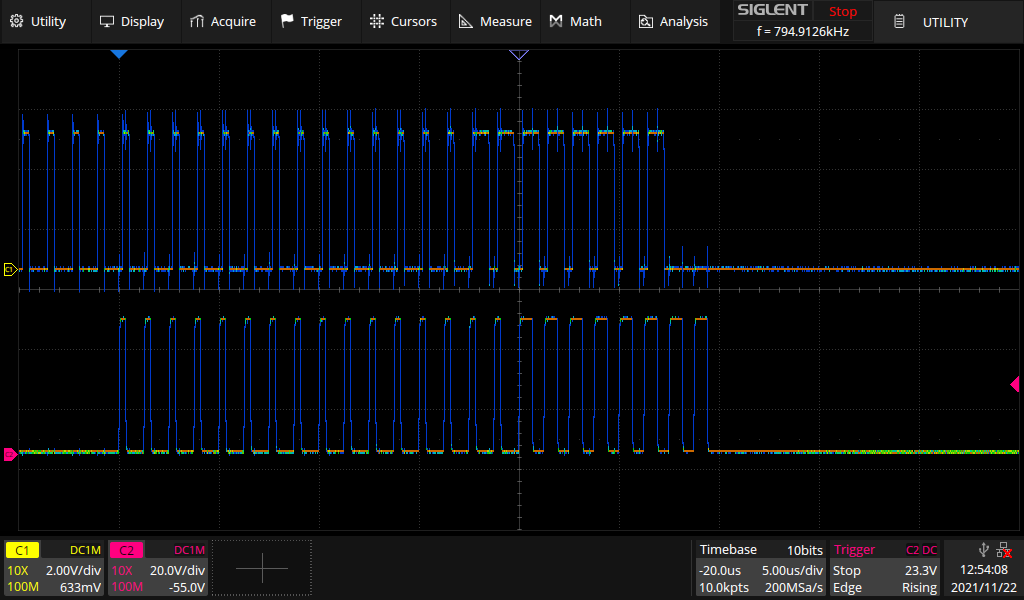
Ich habe die Senderoutine noch ein wenig verändert, um die Daten im Oszilloscopebild besser separieren zu können. Auf dem Oszilloscopebild ist der Dateneingang und der Datenausgang des 12 NeoPixel LED Rings zu sehen. Interessant dabei ist, dass die Neopixel scheinbar einen Buffer von 2 Bit haben, da das Signal am Ausgang des letzten Pixels um 2 Bit verschoben ist.
1 | /*
|
2 | *
|
3 | * Sender for NeoPixel stripe
|
4 | * last LED is used as data container (24bit)
|
5 | *
|
6 | * 21.11.2021 chris_
|
7 | *
|
8 | */
|
9 | #include <Adafruit_NeoPixel.h> |
10 | #ifdef __AVR__
|
11 | #include <avr/power.h> |
12 | #endif
|
13 | |
14 | #define PIN 6
|
15 | |
16 | #define NUMPIXELS 12
|
17 | |
18 | // NUMPIXEL increase by 1 because last pixel is the data transmission message
|
19 | Adafruit_NeoPixel pixels = Adafruit_NeoPixel(NUMPIXELS + 1, PIN, NEO_GRB + NEO_KHZ800); |
20 | |
21 | |
22 | void setup() |
23 | {
|
24 | pixels.begin(); |
25 | }
|
26 | |
27 | |
28 | uint32_t TestData[]={0x000000,0x0000FF,0x00FF00,0xFF0000}; |
29 | |
30 | void loop() |
31 | {
|
32 | static uint8_t ledPos = 0; |
33 | static uint32_t data = 0; // data to be tranmitted after the last pixel (only 24bits available) |
34 | static uint8_t idx=0; |
35 | |
36 | |
37 | for (int n = 0; n < NUMPIXELS; n++) |
38 | {
|
39 | if (ledPos == n) pixels.setPixelColor(n, pixels.Color(0, 150, 0)); |
40 | else pixels.setPixelColor(n, pixels.Color(0, 0, 0)); |
41 | }
|
42 | const uint8_t dataPos = NUMPIXELS; |
43 | |
44 | data=TestData[idx]; |
45 | |
46 | pixels.setPixelColor(NUMPIXELS, data); |
47 | pixels.show(); |
48 | |
49 | idx++; |
50 | if(idx>=sizeof(TestData)/sizeof(uint32_t))idx=0; |
51 | //data++; // increase test data transmittet after last LED
|
52 | |
53 | // NeoPixel Lauflicht
|
54 | ledPos++; |
55 | if (ledPos >= NUMPIXELS)ledPos = 0; |
56 | |
57 | delay(2000); |
58 | }
|
Hier die Empfangsroutine.
1 | /*
|
2 | * NeoPixel data receiver
|
3 | *
|
4 | * connect the output of a neopixel stripe to D11 of an Arduino Nano
|
5 | *
|
6 | * This programm will wait for a high level and than sample the input pin with maximum speed
|
7 | * After 256 bytes are sampled, they will printed to the serial output
|
8 | *
|
9 | * 21.11.2021 chris_
|
10 | *
|
11 | */
|
12 | // compiler flags changed to O3 ( maximum speed ) line 23-28 in
|
13 | // ~/tools/Arduino/arduino-1.8.5/hardware/arduino/avr$
|
14 | // avr-objdump -D -S MCNET_NeoPixelReceiver.ino.elf > dump.txt
|
15 | |
16 | |
17 | // PB3 is D11 on Arduino Nano
|
18 | #define INPUTPIN (1<<PB3) //
|
19 | #define PINVALUE (PINB&INPUTPIN)
|
20 | #define PINLOW (PINVALUE==0)
|
21 | #define PINHIGH (!PINLOW)
|
22 | |
23 | void setup() |
24 | {
|
25 | Serial.begin(115200); |
26 | }
|
27 | |
28 | #define BUFFERLENGTH 256 // must be 256
|
29 | uint8_t Buffer[BUFFERLENGTH]; |
30 | |
31 | void recordSignal() |
32 | {
|
33 | uint8_t n = 0; |
34 | uint8_t *pointer; |
35 | pointer = Buffer; |
36 | cli(); |
37 | while (PINLOW); // wait for the pin |
38 | do { |
39 | *pointer = PINB; |
40 | pointer++; |
41 | n++; |
42 | } while (n != 0); |
43 | sei(); |
44 | }
|
45 | |
46 | void loop() |
47 | {
|
48 | uint8_t n = 0; |
49 | |
50 | recordSignal(); |
51 | do { |
52 | uint8_t bitData = Buffer[n] & (1 << PB3); |
53 | Serial.println(bitData); |
54 | delay(1); // delay in between reads for stability |
55 | n++; |
56 | } while (n != 0); |
57 | |
58 | delay(1000); |
59 | }
|
Ich habe den Optimierungslevel in der "platform.txt" auf O3 umgestellt, in der Annahme, dass das den schnellsten Code ergibt ( .. stimmt das? ). Der Objdump ergibt folgendes:
1 | void recordSignal() |
2 | {
|
3 | uint8_t n = 0; |
4 | uint8_t *pointer; |
5 | pointer = Buffer; |
6 | cli(); |
7 | 692: f8 94 cli |
8 | while (PINLOW); // wait for the pin |
9 | 694: 1b 9b sbis 0x03, 3 ; 3 |
10 | 696: fe cf rjmp .-4 ; 0x694 <main+0x11e> |
11 | 698: ef e1 ldi r30, 0x1F ; 31 |
12 | 69a: f1 e0 ldi r31, 0x01 ; 1 |
13 | do { |
14 | *pointer = PINB; |
15 | 69c: 83 b1 in r24, 0x03 ; 3 |
16 | 69e: 81 93 st Z+, r24 |
17 | uint8_t n = 0; |
18 | uint8_t *pointer; |
19 | pointer = Buffer; |
20 | cli(); |
21 | while (PINLOW); // wait for the pin |
22 | do { |
23 | 6a0: 92 e0 ldi r25, 0x02 ; 2 |
24 | 6a2: ef 31 cpi r30, 0x1F ; 31 |
25 | 6a4: f9 07 cpc r31, r25 |
26 | 6a6: d1 f7 brne .-12 ; 0x69c <main+0x126> |
27 | *pointer = PINB; |
28 | pointer++; |
29 | n++; |
30 | } while (n != 0); |
31 | sei(); |
6a8: 78 94 sei }
Johannes S. schrieb: > Das einzig richtige war die Anmerkung das die Quellen der Arduino Libs > frei verfügbar sind. Und wenn man da reinschaut, sieht man das die > Adafruit Neopixel sehr wohl targetspezifische Implementierungen hat. > Beim ESP32 wird das RMT verwendet, beim RP2040 die PIO. Es geht aber nunmal in diesem Thread um einen Arduino NANO, sprich: AVR8, siehe OT! Dein dümmliches tendenzielles Geschwalle geht also vollkommen am Problem vorbei!
c-hater schrieb: > Dein dümmliches tendenzielles Geschwalle geht also vollkommen am Problem > vorbei! Korrektur: als Sender war wohl auch ein ESP32 zugelassen. Insofern passt also deine Aussage doch.
Angehängte Dateien:
-

Testempfang.png
31 KB
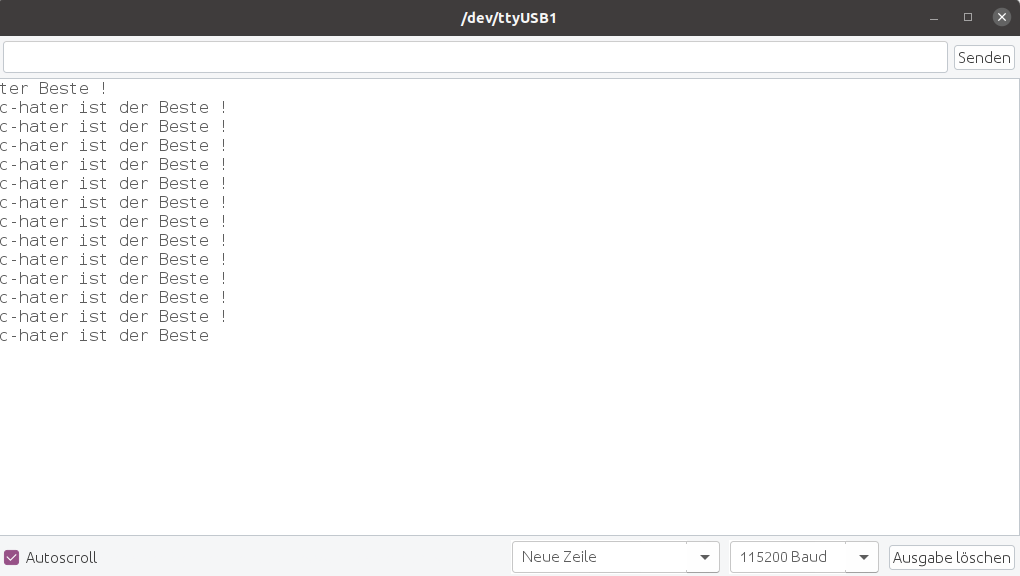
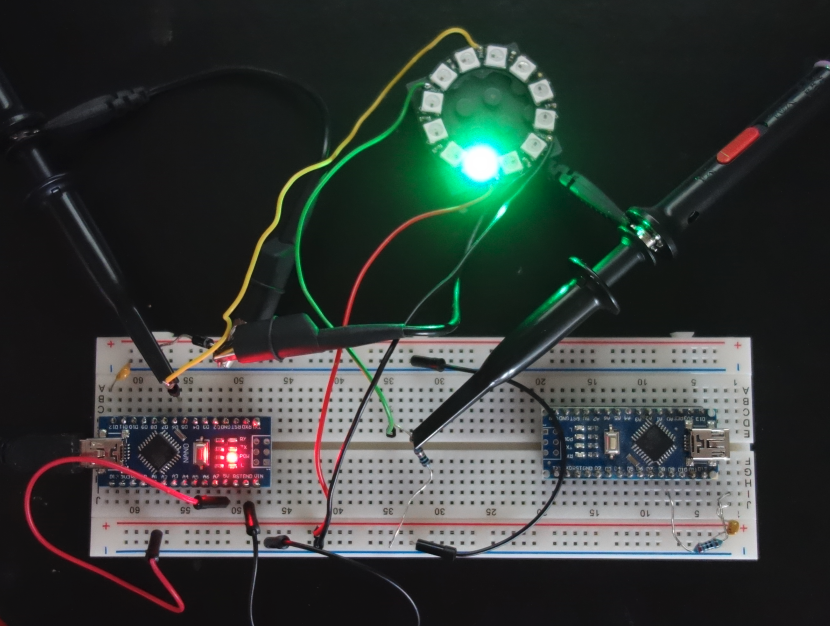
Hier das erste funktionierende Beispiel mit zwei Arduino-Nano. Es ist zwar ein etwas unaufgeräumter Quick-Hack und ziemlich langsam, aber zumindest zeigt es, dass es mit zwei Arduino-Nanos geht. Die Datenübertragung geht über 12 NeoPixel-LEDs und der Ausgang der letzten LED ist an D11 des Empfänger-Arduinos angeschlossen. Die Ausgabe erfolgt über den seriellen Port des Arduinos. Das Ergebnis ist im Screenshot zu sehen.
Habe den Sender mal getestet.an der überlauf LED sieht man in Weiß die Daten "aufblitzen" Also 4+1 LED. Muss nur noch den Empfänger anschliessen, testen. Bin gespannt!? MfG alterknacker
Empfänger funktioniert! Jetzt muss ich mit meinen Sender ein Byte als Überlauf senden welches als Datenbyte ausgewertet wird. ..denke ich
>Empfänger funktioniert! Super :-) >Jetzt muss ich mit meinen Sender ein Byte als Überlauf senden welches >als Datenbyte ausgewertet wird. >..denke ich Schau mal in der Senderoutine (Zeile 81):
1 | sendByte(Message[counter++]); |
Dort kannst Du auch
1 | sendByte(88); |
2 | sendByte(123); |
oder
1 | sendByte(counter++); // jetzt wird nicht die Nachricht, sondern der Zähler gesendet |
oder ähnliches schreiben. Im Empfänger solltest Du dann aber die Zeile 161 auskommentieren und statt dessen die Zeile 160 verwenden, damit die Zahlen und nicht die Ascci-Zeichen sichtbar werden: Zeile 160
1 | Serial.print("==>");Serial.write(ReceivedByte);Serial.print(" - ");Serial.println(ReceivedByte); |
Das habe ich soweit schon verstanden. Es wäre natürlich besser wenn ein "Normaler Sender genutzt werden kann. Definiere z.B.13 Leds, habe aber extern nur 12, damit sollen die 3 Farbbyte der Dateninhalt sein. Mal sehen ob ich meinen ESP32 Testsenden auf dein Protokoll um setzen kann. Setze im Sender keine Lib ein, alles zu Fuß. Aufbauend auf den Befehl digitalWrite(DatOut,HIGH); 116 ns digitalWrite(DatOut,LOW); 116 ns Damit kann ich das normale Sendeprotokoll zusammenbasteln Gibt es noch schnellere reproduzierbare Befehle? MfG
Al. K. schrieb: > Gibt es noch schnellere reproduzierbare Befehle? http://fastled.io/ bzw. https://github.com/FastLED/FastLED. LG, Sebastian
Sebastian W. schrieb: > Al. K. schrieb: >> Gibt es noch schnellere reproduzierbare Befehle? Welche vom ESP32 verwendet werden. Welche Zeit brauch z.B delay(0)
Al. K. schrieb: > Welche vom ESP32 verwendet werden. Hast du https://github.com/FastLED/FastLED/blob/master/src/platforms/esp/32/fastspi_esp32.h angeschaut? LG, Sebastian
Al. K. schrieb: > Welche Zeit brauch z.B delay(0) schau auf einen Oszi oder LA, 2 Ports nehmen high low schalten nacheinander und dazwischen mit / ohne delay(0); wobei delay(0) sinnlos ist und eigentlich auch wegoptimiert werden könnte. Was weiss ich was der Compiler daraus macht. Ich war ja fast bereit den ESP32 anzuwerfen samt Arduino IDE. Manches solltest du aber selber schaffen so weit wie du schon gekommen bist.
Al. K. schrieb: > Setze im Sender keine Lib ein, alles zu Fuß. > > Aufbauend auf den Befehl > digitalWrite(DatOut,HIGH); 116 ns kann man so machen, dann ist es halt Sch*ße. Wurde doch schon geschrieben das Bitganging viel schlechter ist als vorhandene hardware devices zu nutzen. Und das machen die ESP Libs, auch wenn es hier von verschiedenen immer wieder schlechtgeredet wird. Al. K. schrieb: > Gibt es noch schnellere reproduzierbare Befehle? das sind keine Befehle, sondern Funktionen die aufgerufen werden. 'Arduino Befehle' gibt es sowieso nicht. Al. K. schrieb: > Welche Zeit brauch z.B delay(0) Muss man nicht messen, die Arbeit kann man sich sparen weil diese Funktion denkbar ungeeignet ist. Das delay(n) ruft vTaskDelay auf und wartet n ms. Da die ESP Arduino Implementierung das FreeRTOS als Basis nutzt hat man da also den Overhead des RTOS am Hals. delay(0) ist dazu noch ein Sonderfall der den Scheduler aufruft und dann in einem taskYield() endet, das macht man also nur um Rechenzeit an andere wartende Task gleicher Priorität abzugeben. Das die WS Lib mit Hardwarhilfe arbeitet hat noch einen Grund: das Wifi im ESP verlangt strenges Timing und hat eine höhere Prio als deine Applikation. Also kann es dein Bitbanging beliebig durcheinanderhauen. Und wenn man kein Wifi benötigt ist der ESP einfach mit Kanonen auf Spatzen. Selbst ein delayMicroseconds() hat nur Mikrosekunden Auflösung und eignet sich also nicht für 0,1 µs genaues Timing. Ergo: völlig falscher Ansatz, gehe zurück auf Los.
Joachim B. schrieb: > schau auf einen Oszi oder LA, 2 Ports nehmen high low schalten > nacheinander und dazwischen mit / ohne delay(0); > wobei delay(0) sinnlos ist und eigentlich auch wegoptimiert werden Laufzeiten von Befehlen zu ermitteln ist mir bekannt. Es geht nur um den Aufwand. Vor30/40 Jahren war dies zwingend zu wissen,zu messen oder zu erlesen. Jetzt Frage ich einfach, da bestimmt auch Andere Leser die hier diskutierten Probleme interessieren. Wer die Lösung parat hat, kann sie nennen. Keiner muss danach suchen. OsZi habe ich nicht mehr, auch kein Imp,Freque,Perioden Messgerät. Könnte mir ein Messgerät Programmieren. Was ist ein LA? P.S. Das wenigste was ich teste,suche und bastle ist für mich. MfG alterknacker
Johannes S. schrieb: > Das die WS Lib mit Hardwarhilfe arbeitet hat noch einen Grund: das Wifi > im ESP verlangt strenges Timing und hat eine höhere Prio als deine > Applikation. Also kann es dein Bitbanging beliebig durcheinanderhauen. > Und wenn man kein Wifi benötigt ist der ESP einfach mit Kanonen auf > Spatzen. Das ist bekannt und wurde schon mehrfach geschrieben. Das Delay(0) war ein ersichtliches Beispiel. Für mich war es ein Versuch zu Fuß mit dem ESP32 die WS anzusteuern. Ist aber nicht Lebenswichtig. Ich wollte auch nur erfragen ob es ein Befehl mit Kleinerer Laufzeit wie 0,116 yS gibt.. wenn ja, kann man genauere Protokolle basteln. altekinacker
c-hater schrieb: > Logic analyzer. Sowas wie ein Oszi für digitale Signale. Schön, das ich dies jetzt richtig erklärt bekomme ;-)) Habe ich auch nicht. ..und selbst basteln ist wegen der begrenzten Lebenszeit nicht mehr drin.
Es gibt nur Maschinenbefehle in Assembler. Als Dummy nimmt man da NOP, das ist hier per #define verfügbar und kann mit NOP() im Code verwendet werden. Mit den immer noch bestehenden Nachteilen das es kein sicheres Timing auf einem Multicore mit RTOS ermöglicht. Und das Bitbanging per Code ist abhängig vom CPU Takt und wenn es im Flash ausgeführt wird, dann noch von der Flash Latency. Also alles maximal ungünstig.
Al. K. schrieb: > Habe ich auch nicht. > ..und selbst basteln ist wegen der begrenzten Lebenszeit nicht mehr > drin. Die Dinger bekommt man als Fertig Gerät ab 8 Euro bei Amazon, und noch billiger bei Aliexpress. https://www.amazon.de/iHaospace-Channel-Analyzer-Support-support/dp/B071LFZRTZ
Al. K. schrieb: > ..und selbst basteln ist wegen der begrenzten Lebenszeit nicht mehr > drin. aber auf Antwort im Forum warten? In der Zeit hättest du längst messen können! Sogar ich hatte mir dies Jahr noch ein Rigol 5104 zugelegt, ich glaube zwar nicht das ich es noch viel nutze, aber man weiss ja nie. Al. K. schrieb: > Wer die Lösung parat hat, kann sie nennen. und nun wie lange in µs dauert denn nun Al. K. schrieb: > Welche Zeit brauch z.B delay(0) wo ist die Antwort?
Stefan ⛄ F. schrieb: > Die Dinger bekommt man als Fertig Gerät ab 8 Euro bei Amazon, und noch > billiger bei Aliexpress. > https://www.amazon.de/iHaospace-Channel-Analyzer-Support-support/dp/B071LFZRTZ Werde mir mal so was zulegen, leider bei dem benannten Teil keine richtige Beschreibung. Bissel was zum Messen ist nicht unwichtig. MfG
Joachim B. schrieb: > wo ist die Antwort? Ich kenne Sie nicht! Walter T. schrieb: > Was ist denn jetzt eigentlich der Zweck der Aktion? Die Anzahl der > angeschlossenen LEDs zählen? Es werden keine Leds gezählt, die Anzahl muss nur bekannt sein.
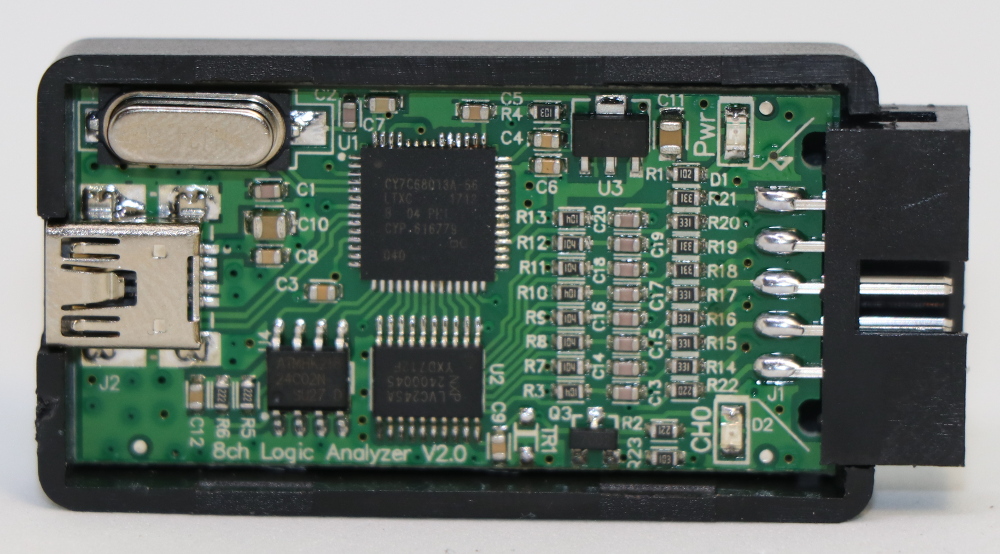
Angehängte Dateien:
-

c_la_pcb_front.jpg
290 KB
{kind=link}
{kind=link}
Al. K. schrieb: > Werde mir mal so was zulegen, leider bei dem benannten Teil keine > richtige Beschreibung. Die erkennt man am Bild, werden unter gefühlt 100 Namen verkauft. Da ist immer das gleiche drin. Im Grunde nur ein Mikrocontroller, ein Bustreiber 74LVC245 oder 74HC245, und eine primitive Schutzschaltung für die 8 Eingänge. Ich benutze dazu das Programm PulseView. Weiss jemand wozu der Bustreiber gut ist? Warum hängen die Eingänge nicht direkt am Mikrocontroller?
Stefan ⛄ F. schrieb: > Weiss jemand wozu der Bustreiber gut ist? Warum hängen die Eingänge > nicht direkt am Mikrocontroller? Triggereingänge? Überlastfähiger?
Al. K. schrieb: > Triggereingänge? > Überlastfähiger? Das Ding hat keine Hardware Trigger. Die Eingänge des µC sind bereits 5V tolerant.
{kind=link}
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.