Hallo zusammen, ich habe folgendes Problem und würde mich über Hilfe sehr freuen. Ich habe eine stabile Fräsmaschine für Alu und Stahl ähnlich Deckel FP1. Dort habe ich Nema 34 Motoren verbaut, ein 42V Netzteil mit 1200W dazu. Die Endstufen sind Endstufe HP 5056 5,6A 50V, eingestellt auf 5000 Schritte bei voller Amperezahl. Jemand hat mir ein kleines Programm auf nem Arduino Nano geschrieben, mit dem ich per Taster links und rechts verfahren kann und mit nem Poti die Geschwindigkeit einstellen kann. Die Werte im Programm sind veränderbar, sodaß ich eigentlich Min und Max Geschwindigkeit einstellen kann. Aber egal welche Werte ich einsetzte und welche Kombination an Auflösung ich dazu bei der Endstufe einstelle, ich komme ohne ein Durchrutschen des Motors nicht auf eine höhere Geschwindigkeit. Mir ist bewußt, das Schrittmotoren nicht sehr schnell drehen können und bei höherer Geschwindigkeit an Kraft verlieren, aber das passiert bei mir schon bei ca. 150 U/m und das finde ich verwunderlich. Ich habe in der Z Achse extra den kurzen Nema 34 gegen einen langen Nema 34 ausgetauscht, aber es hat garkeinen Unterschied gemacht. Wenn der Motor stoppt, ist das immer ein Bereich indem er sich aufschwingt.Ich höre also deutlich ein Schwingungsfeld. Ich habe darüber auch schon ein wenig gelesen nur fällt es mir schwer zu glauben, das dieser fette Motor, mit dem man ein Autodach aufwickeln kann, schon bei 150U/m mit wenig Last schlapp macht. Ich meine, ich kurbel sonst an einem Handrad mit 12 cm Durchmesser 1zu 1 übersetzt den Tisch hoch und runter, das kann doch für so einen dicken Motor kein Problem sein. Der Motor ist 1zu4 untersetzt an die Z Achse angeschlossen, er macht also 4 Umdrehungen um das Handrad 1x herum zu drehen. Trotzdem kurbel ich mit der Hand immernoch schneller. Also ist die aufgewendete Kraft in meinen Augen doch nicht so groß, sonst würde es doch nicht problemlos mit der Hand schaffen. Irgendeine Idee aus der Ferne? Gibt es andere Endstufen, die besser arbeiten oder muss man das Programm anders schreiben. Vielen Dank für eure Hilfe! Gruß Tim
Ein Techniker würde die Datenblätter des Motors und des Steuergerätes verlinken und den Code anhängen. So ist das für andere nur herumraten.
Tim J. schrieb: > Mir ist > bewußt, das Schrittmotoren nicht sehr schnell drehen können Ist dir auch bewusst das die Dinger eine Beschleunigungs-/Brems-Rampe benötigen? So einfach mal von ersten Schritt an von 0 auf Max ist da nicht. In deinem ganzen Textgeschwurbel kann ich davon jedenfals nichts wirklich erkennen.
Hast du Drehzahlrampen in deiner Arduino-Software eingebaut? Ohne geht es nicht.
Fährt dieses unbekannte Programm auf dem Arduino Nano denn auch Beschleunigungs- und Abbremsrampen in der Geschwindigkeit? Oder legt der einfach nur den Schritttakt für die eingestellte Geschwindigkeit an?
Tim J. schrieb: > Gibt es andere Endstufen, die besser arbeiten oder muss man das Programm > anders schreiben. Man muss die Grundlagen der Schrittmotore verstehen. Ein Diagramm Drehzahl vs. Drehmoment des Motors wäre gut, damit man ahnt, ob er es überhaupt kann. Gross ist nämlich nicht unbedingt auch schnell. Mikroschritte sind auch gut. Ein Programm mit Rampen (Arduino AccelStepper oder Mach3 auf dem PC) ist notwendig. Da deine Motoren schon die Fräse antreiben, ist Dämpfung gegeben. Dein Treiber ist stromregelnd mit deutlich höherer Betriebsspannung, gut. Gleichzeitig per Hand kurbeln während die Motoren elektrisch mit den Treibern verbunden sind killt aber die Treiber. https://dse-faq.elektronik-kompendium.de/dse-faq.htm#F.10 Am Besten wäre natürlich eine Berechnung des benötigten Drehmoments, der zu beschleunigenden Masse, der Verluste in Getriebe und Spindel damit man nicht bloss bastelt, sondern es ingenieuersmässig auslegen kann.
Angehängte Dateien:
-

Nema_34.JPG
400 KB
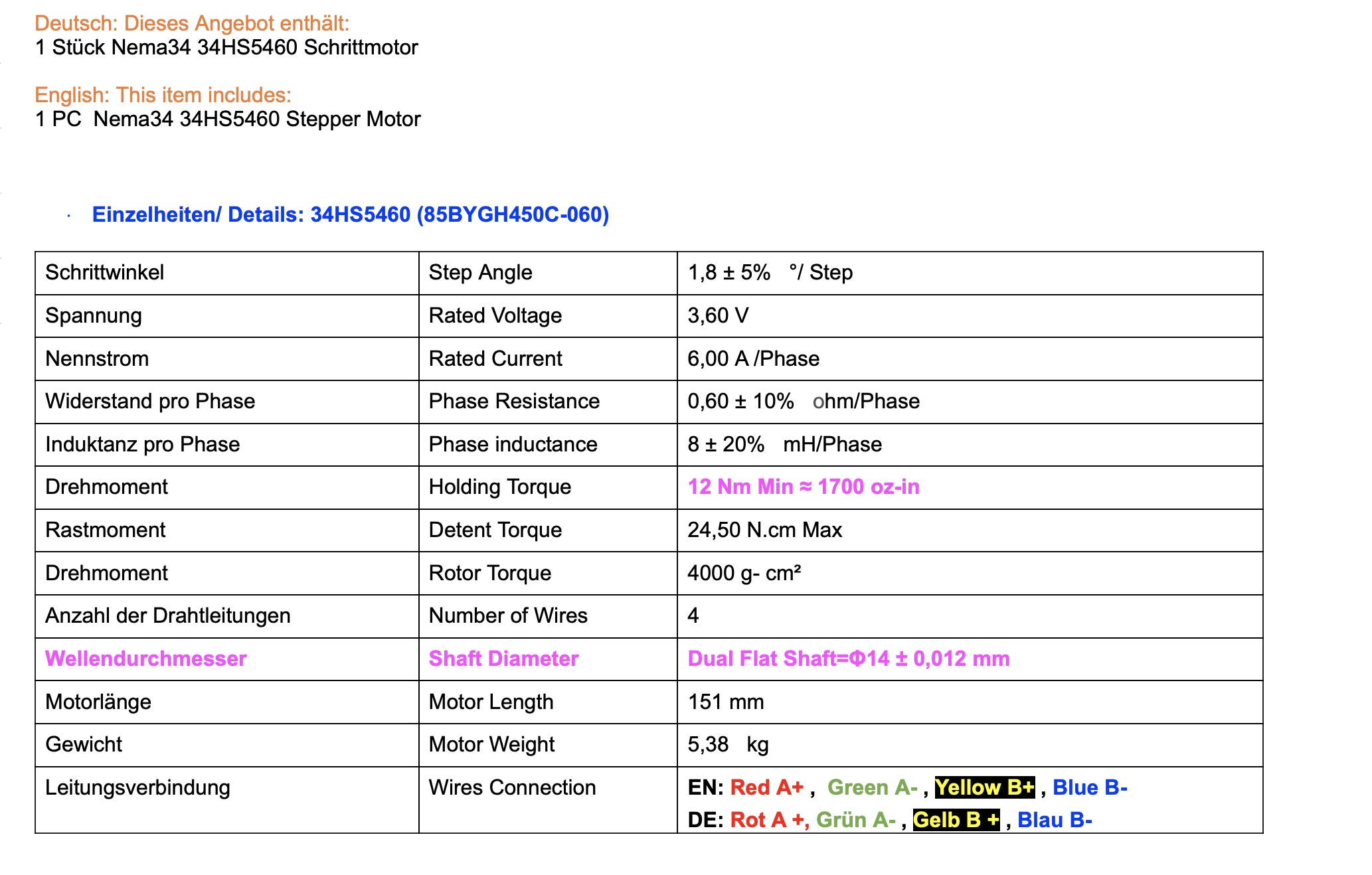
Ok, sorry hier mal die noch benötigten Daten. 1x Datenblatt Motor 1x Datenblatt Endstufe 1x der Code als txt 1x der Code als Arduino Programm. Gruß Tim P.S. Nicht wundern, im Programm ist noch ein Zusatz eingeschrieben, der es ermöglichen soll über einen Taster einen beliebiegen Punkt abzuspeichern und über einen anderen Taster wieder anzufahren. Leider funktioniert das nicht wie geplant, irgendwo gehen Schritte verloren,es ist nicht genau genug.
Hallo, danke für eure schnellen und zahlreichen Antworten! Die Rampe fahre ich mit der Hand am Poti, mir ist bewußt, das man Rampen braucht, aber ich wollte keine "Verzögerungen" einbauen und meine Hand ist gut genug,mit nem Poti ne Rampe zu simulieren. @ MaWin: Ich hab nicht gleichzeitig gekurbelt und den Motor betrieben, das habe ich wohl missverständlich ausgedrückt. Ob ich solche Berechnungen hinbekomme, muß ich schauen. Ich dachte einfach überdimensionieren reicht und hatte die Hoffnung, das diese Motoren überdimensioniert sind.
Tim J. schrieb: > Die Rampe > fahre ich mit der Hand am Poti, mir ist bewußt, das man Rampen braucht, > aber ich wollte keine "Verzögerungen" einbauen und meine Hand ist gut > genug,mit nem Poti ne Rampe zu simulieren. Das Programm ist wohl nicht vollständig gezeigt. Ist aber auch egal. Stelle am Motortreiber mal Mikroschritte ein: 4, 8 oder auch 16. Der Motor fährt dann zwar langsamer sollte aber nicht mehr so stark vibrieren und dadurch stehen bleiben. Wenn Du einen Signalgeber hättest, könntest Du die Geschwindigkeit zunächst auch ohne dieses Arduino-Gedöns einstellen und testen.
Tim J. schrieb: > Hallo, danke für eure schnellen und zahlreichen Antworten! Die Rampe > fahre ich mit der Hand am Poti, mir ist bewußt, das man Rampen braucht, Warum baust du dann keine ein? > aber ich wollte keine "Verzögerungen" einbauen und meine Hand ist gut > genug,mit nem Poti ne Rampe zu simulieren. Ähm ... Nein! Die Dynamik der Rampe ist schon wichtig. Und die Rampe muss schon bei null starten, die minimale Taktrate aus dem Timer ist ggf. schon zu hoch Je nach angetriebener Mechanik muss man auch Drehzahlbereiche, in denen Resonanzen auftreten, schneller durchlaufen. Und du brauchst die nicht nur beim Beschleunigen, sondern ebenso beim Abbremsen. Wenn die Nullpunktfahrt einfach das Enable abschaltet, rutscht der Motor mehrere Schritte durch.
Tim J. schrieb: > Jemand hat mir ein kleines Programm auf nem Arduino Nano geschrieben, Wenn Du selber mit Arduino umgehen kannst, hätte ich passende Programme für Schrittgeber, die per Poti Frequenz und Richtung erzeugen: http://mino-elektronik.de/Generator/takte_impulse.htm#bsp3a Thorsten S. schrieb: > Und die Rampe muss schon bei > null starten, Und dann pro Schritt um 1 % erhöht werden? ;-)
Angehängte Dateien:
-

IMG_7352.JPG
4,5 MB

m.n. schrieb: > Stelle am Motortreiber mal Mikroschritte ein: 4, 8 oder auch 16 Habe ich gemacht, leider in allen Bereichen bei der gewünschten Drehzahl kein Erfolg. Thorsten S. schrieb: > Die Dynamik der Rampe ist schon wichtig. Und die Rampe muss schon bei > null starten, die minimale Taktrate aus dem Timer ist ggf. schon zu hoch > Je nach angetriebener Mechanik muss man auch Drehzahlbereiche, in denen > Resonanzen auftreten, schneller durchlaufen. Ich denke hier liegt irgendwo der Schlüssel. Es muss mit den Schwingungen zutun haben. ich habe das Gefühl, das ich manchmal über den schwingenden Bereich komme, indem ich am Poti beim Starten der Schwingungen etwas schneller darüber hinweg springe. Manchmal schaft es der Motor dann, sich über das Schwingungsfeld hinwegzusetzten. Aber grundsätzlich sind alle Paramater der Hardware gut gewählt und ich benötige keine Andere?? ich meine der Nema 34 ist doch gut dimensioniert, wenn ich meine Hand als Kurbelkraft annehme? > > Und du brauchst die nicht nur beim Beschleunigen, sondern ebenso beim > Abbremsen. Wenn die Nullpunktfahrt einfach das Enable abschaltet, > rutscht der Motor mehrere Schritte durch. Theoretisch schon, nur ist meine langsamste Einstellung so langsam, das man das drehen kaum sieht. Ich kann ihn dann am Poti sauber und sanft hochdrehen, ohne das er da irgendwo durchrutscht. Außer oben, wenn er bei höherer Drehzahl in den schwingenden Bereich kommt. Und ich bremse ihn auch nicht einfach ab sondern dimme immer runter, auch hier kein Schrittverlust. Aber es geht mir gerade eigentlich auch nicht um Schrittverluste sondern um die maximale Verfahrgeschwindigkeit.
Tim J. schrieb: > 1x der Code als txt Und warum nicht den Code als Code? Mit txt ist jeder Code-Betrachter zum Scheitern verurteilt und kann den nicht ordentlich anzeigen, weil ihm die Information über die Programmiersprache fehlt.
Tim J. schrieb: > 1x Datenblatt Motor Wow, ein 8mH Motor. Klar ist der langsam. Und er benötigt 6Arms für volles Drehmoment, bekommt aber vom Treiber nur 4Arms, bringt also nur 66% und somit 8Nm, was immer noch sehr sehr stark ist. Du hast dir gezielt einen kräftigen aber langsamen Motor ausgesucht. Viel bringt bei der Auswahl also nicht viel. Es fehlt halt ein Diagramm Drehmoment vs. Drehzahl im Datenblatt. Eventuell braucht man eine Übersetzung, der langsame Motor dreht also die Spindel schneller aber mit weniger Drehmoment.
m.n. schrieb: > Wenn Du selber mit Arduino umgehen kannst, hätte ich passende Programme > für Schrittgeber, die per Poti Frequenz und Richtung erzeugen: > http://mino-elektronik.de/Generator/takte_impulse.htm#bsp3a Danke, aber das Programm hab ich ja schon!
MaWin schrieb: > Wow, ein 8mH Motor. > > Klar ist der langsam. > > Und er benötigt 6Arms für volles Drehmoment, bekommt aber vom Treiber > nur 4Arms, bringt also nur 66% und somit 8Nm, was immer noch sehr sehr > stark ist. > > Du hast dir gezielt einen kräftigen aber langsamen Motor ausgesucht. > Viel bringt bei der Auswahl also nicht viel. > > Es fehlt halt ein Diagramm Drehmoment vs. Drehzahl im Datenblatt. > Eventuell braucht man eine Übersetzung, der langsame Motor dreht also > die Spindel schneller aber mit weniger Drehmoment. Ok, dann könnte ich doch die Zahnriemenübersetzung von 4zu1 auf 2zu1 oder 1zu1 ersetzen. Im Programm kann ich den Motor super langsam stellen, das sollte also immernoch ausreichen um sehr fein zu Verfahren. Vielleicht ist das die Lösung und definitiv ein Bereich in dem ich mich auskenne :)
Forist schrieb: > Und warum nicht den Code als Code? > Mit txt ist jeder Code-Betrachter zum Scheitern verurteilt und kann den > nicht ordentlich anzeigen, weil ihm die Information über die > Programmiersprache fehlt. Ist doch oben auch mit angehängt!
Bei nanotec gibt es ein Datenblatt eines vergleichbaren Motors: https://de.nanotec.com/produkte/583-st8918d6708-a Deine 150 UPM sind umgerechnet 500 Schritte/s. Da scheint sich das Drehmoment in Null aufzulösen (siehe ganz unten). Fazit: der kann nicht schneller.
Der Motor von Nanotec hat dabei nur 4,9 mH Induktanz, Deiner sogar 8 mH. Somit ist der Drehmomentverlust bei hoher Schrittfrequenz sogar noch stärker ausgeprägt.
Ok, super vielen Dank, jetzt hab ich ne Richtung in der ich weiter suchen kann. Ich recherchier mal weiter, vielen Dank für diese Starthilfe!
Andreas S. schrieb: > Der Motor von Nanotec hat dabei nur 4,9 mH Induktanz, Deiner sogar 8 mH. Der Nanotec hat 2 Wicklungen a 4.9mH die parallel zu schalten sind, seiner nur eine. Passt schon ungefähr.
MaWin schrieb: > Der Nanotec hat 2 Wicklungen a 4.9mH die parallel zu schalten sind, > seiner nur eine. Passt schon ungefähr. Aber aufpassen, die Wicklungen sind auf dem selben Kern, also magnetisch gekoppelt. Die Wicklungen dürfen nicht wie einzelne Induktivitäten betrachtet werden. Werden die Wicklungen parallel geschaltet dann bleibt die Induktivität gleich. Es verhält sich wie eine Spule mit gleicher Windungszahl und doppeltem Draht. Bei Serienschaltung vervierfacht sich die Induktivität, Verhalten wie eine Spule mit doppelter Windungszahl.
Moin, Dein Code mit Pin-Toggle mag funktionieren. Es gibt aber für Arduino umfangreiche Stepper-Bibliotheken. Die machen die Rampe usw. automatisch und sind der gut zu bedienen. Besser früh als Spät solltest du dich damit beschäftigen. Ansonsten: Ab 100 Umdrehungen geht das Drehmoment von Schrittmotoren zurück und bei der Variante die du hast durch die Induktivität besonders. Wie die anderen schon geschrieben haben. Wenn dir das zu lahm ist musst du Servomotoren nehmen. Edit: Hast du mal eine andere Endstufe ausprobiert?
Tim J. schrieb: >> das dieser fette Motor, Vielleicht ist da zu viel Fett im Motor? Bei meiner Fahrradkette kommt immer etwas Fett oben drauf. Aber nur ganz wenig. Bei Elektromotoren lass ich meist die Schmierung ganz weg. Das macht der Hersteller besser.
Tim J. schrieb: > Ist doch oben auch mit angehängt! Ich (und mein Dateibetrachter) sieht eine Txt-Datei. Folglich weiß er damit nicht artgerecht umzugehen, sondern behandelt das wie jeden x-beliebigen Text ohne Syntax-Highlightning & Co.
Angehängte Dateien:
Forist schrieb: > Ich (und mein Dateibetrachter) sieht eine Txt-Datei. Folglich weiß er > damit nicht artgerecht umzugehen, sondern behandelt das wie jeden > x-beliebigen Text ohne Syntax-Highlightning & Co. Hmm, also ich hab doch auch die "Programm_V1.ino" Datei mit angehängt und dieses Forum zeigt mir auch Wunsch sogar den Code aus der Datei an.
Tim J. schrieb: > Forist schrieb: >> Ich (und mein Dateibetrachter) sieht eine Txt-Datei. Folglich weiß er >> damit nicht artgerecht umzugehen, sondern behandelt das wie jeden >> x-beliebigen Text ohne Syntax-Highlightning & Co. > > Hmm, also ich hab doch auch die "Programm_V1.ino" Datei mit angehängt > und dieses Forum zeigt mir auch Wunsch sogar den Code aus der Datei an. Eine .ino-Datei wird nur formatiert als Sourcecode angezeigt, wenn man die Arduino-Umgebung installiert hat. Für alle anderen ist das eine normale Textdatei. Allerdings sollte ein geübter Programmierer auch ohne das ganze Syntax-Highlighting arbeiten können. Früher (tm) ging das auch.
>> Forist schrieb: >> >>> Ich (und mein Dateibetrachter) sieht eine Txt-Datei. Folglich weiß er >>> damit nicht artgerecht umzugehen, sondern behandelt das wie jeden >>> x-beliebigen Text ohne Syntax-Highlightning & Co. >> >> Hmm, also ich hab doch auch die "Programm_V1.ino" Datei mit angehängt >> und dieses Forum zeigt mir auch Wunsch sogar den Code aus der Datei an. Keine Ahnung wie es mit .ino ist, aber eine .h lässt sich mit OpenOffice lesbar formatiert öffnen, was der Texteditor nicht schafft.
Mach mal ein Bild von dem DIP-Schalter. Außerdem sieht die Endstufe extrem nach Billigst-China aus. Wenn da auf der Front nur "Mircostep Driver" ohne Firmenname / Typbezeichnung draufsteht, bin ich extrem vorsichtig geworden. Viele von diesen Dingern sehen aus wie teurer Markenendstufen von Leadshine etc, aber liefern den Strom nicht, den sie versprechen. Kannst ja mal ein Multimeter mit TrueRMS auf Strommessung stellen und in die eine der Motorphasen (A oder B ist egal) in Reihe schalten und dann beim Verfahren messen, ob die 4A auch beim Motor ankommen.
Angehängte Dateien:
-

IMG_7354.jpg
230 KB -

IMG_7355.JPG
240 KB
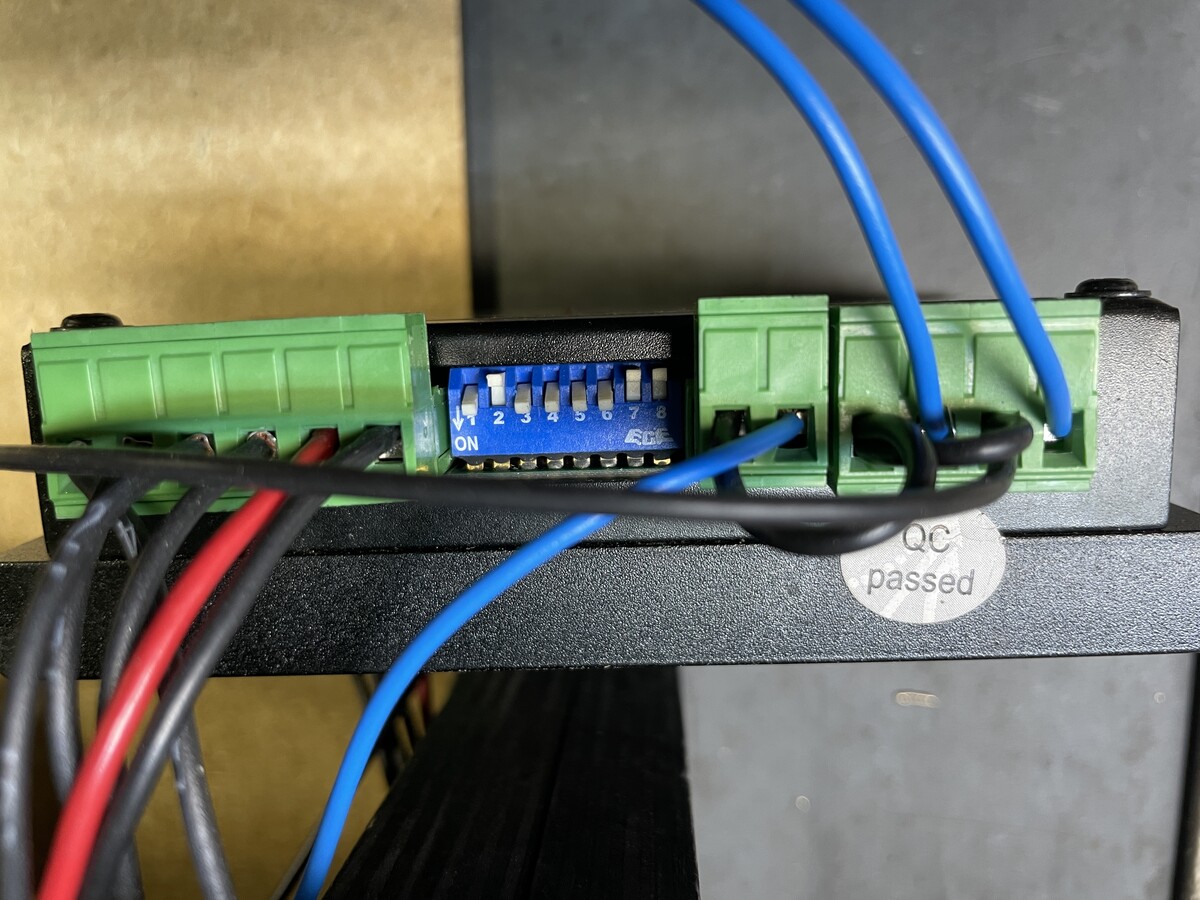
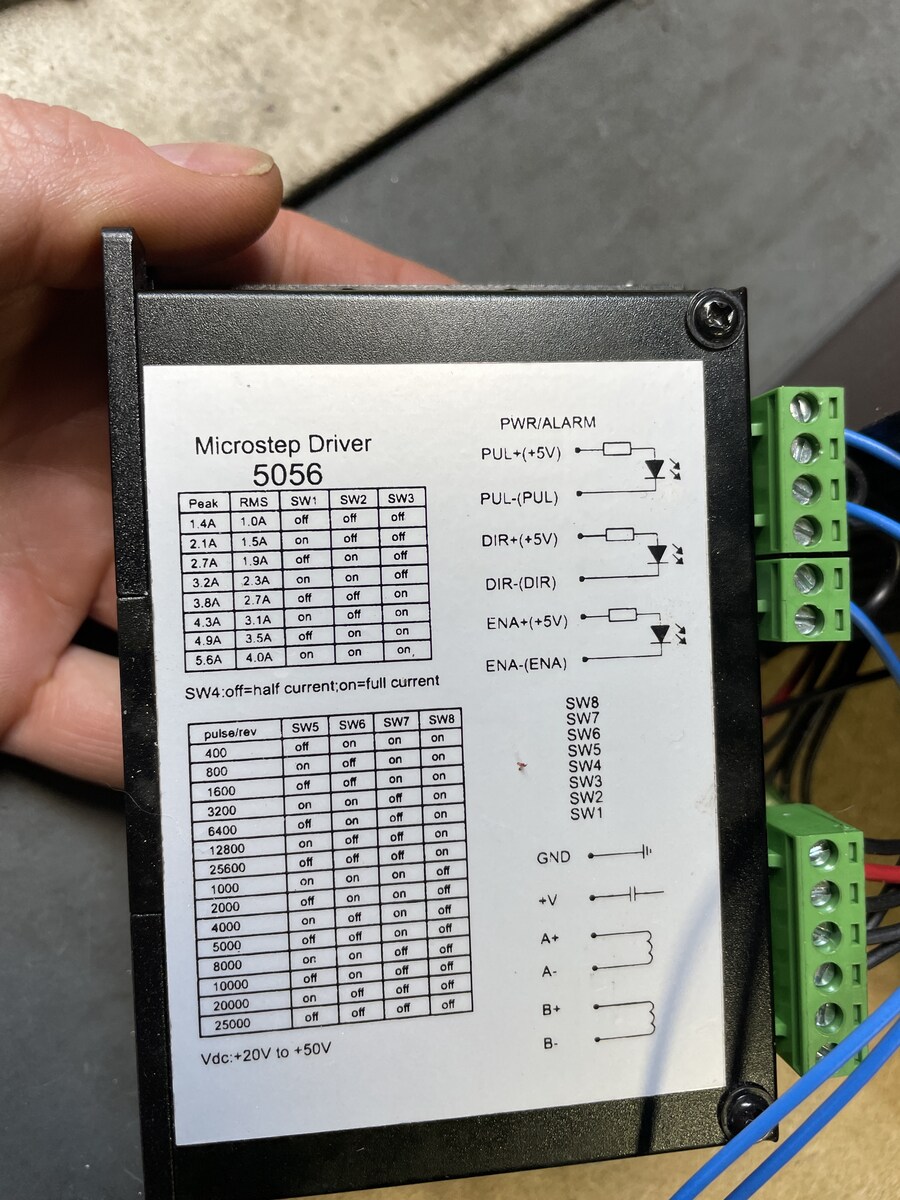
Hey Timo, guter Tip, das könnte echt sein, das die billig sind, hab sie geschenkt bekommen und es steht nichtmal ne Marke drauf. Hier mal die Bilder!
Reicht denn eine Leadshine DM542EU Digital mit 4A Spitze aus oder soll ich was anderes holen.Wenn ja, was würdet ihr hier empfehlen? Ich schmeiß den China Quatsch dann lieber gleich raus und hol was Vernünftiges! Danke an dieser Stelle nochmal für eure schnellen und kompetenden Antworten!! Gruß Tim
Ach ja, aktuell sind die nicht auf volle Leistung "gedipted", hatte die schon auf "on;on;on" war auch kein Unterschied zu spüren!
Für einen Motor mit einem Nennstrom von 6,0A/Phase benötigst du einen Treiber mit 8,5A Spitzenstrom. Mit einem 4A-Treiber bringt der Motor nur das halbe Drehmoment. Ich halte die 8mH nicht für das Problem. Zusammen mit dem geringen Wicklungswiderstand ist die Zeitkonstante klein genug. 150U/min sind 2,5U/s, die sollte der Motor schon schaffen. Das Problem wird die Arduino-Software sein. Wenn das Timing unsauber ist, hilft auch eine feinfühlig am Poti eingestellte Rampe nichts. Es gibt doch die Accel-Stepper-Lib, die schon Beschleunigungsrampen enthält. Oder du nimmst eine Steuerung, die die Rampen selbst erzeugt und an die du direkt ein Poti für den Drehzahl-Sollwert anschließen kannst [1]. Das Netzteil ist mit seinen 1200W übrigens absolut überdimensioniert. 200-250W hätten es für einen Motor auch getan. Mit freundlichen Grüßen Thorsten Ostermann [1] http://mechapro.de/pdf/DDS1_Flyer_DE.pdf
Angehängte Dateien:
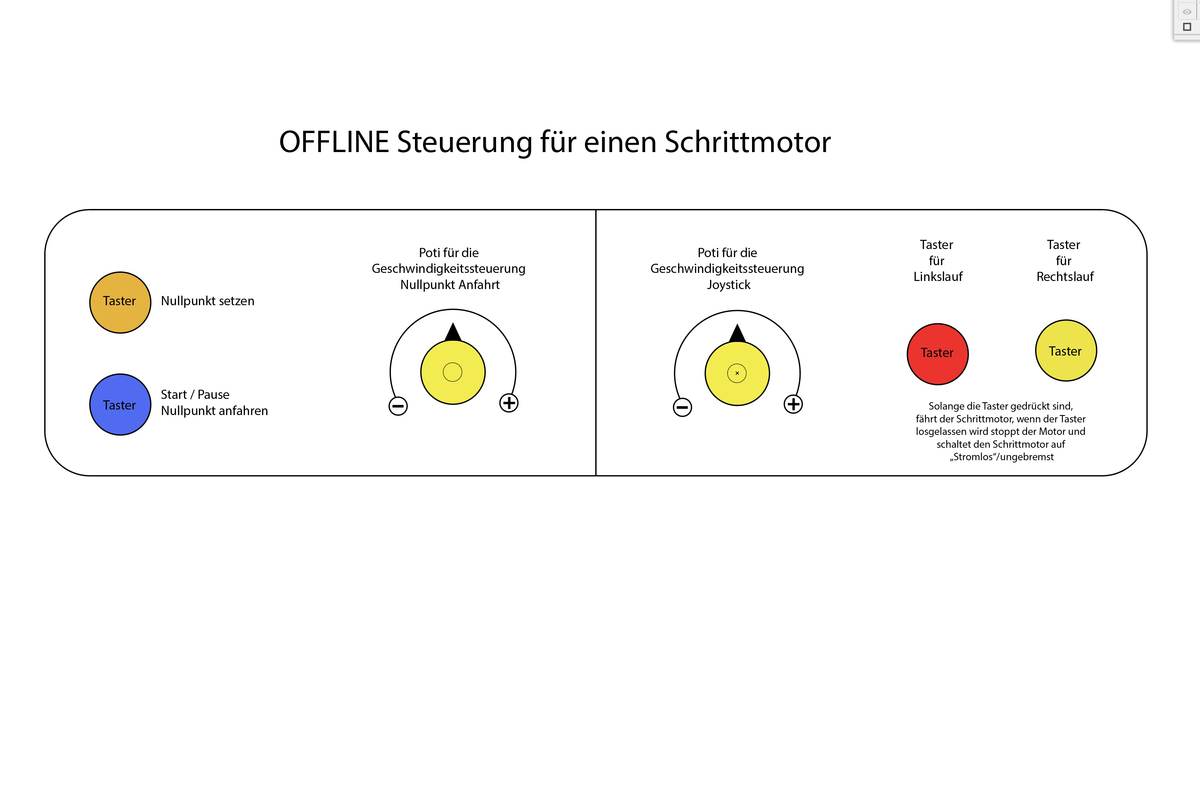
Hallo Herr Ostermann, danke für die Nachricht. Ich habe ein Program schreiben lassen, welches neben dem Verfahren links/rechts mit Poti gesteuerter Geschwindigkeit auch die Möglichkeit bietet, über einen Taster einen beliebigen Punkt zu speichern (auf 0 zu setzten) Wenn ich nun mit den Tastern nach links oder rechts verfahre, zählt ein Counter die Schritte. Halte ich an und drücke einen weiteren Taster, so soll der Motor um diesselbe Schrittanzahl wieder zurück fahren. Leider klappte die Programmierung nicht, aber ich kann mit meiner Wunschvorstellung dieser Positionsspeicherung auch nicht eine andere Steuerung nehmen, es sei denn Sie kennen ein Steuerung die genau das kann. Ich möchte sehr gern bei dem gezeigten Schema der Steuerung bleiben, also keine Poti-Joysticks und auch kein handrad und auch keine Software. Nur ein Mikrocontroller und fertig. Anschalten und los arbeiten. Wenn jemand sich absolut sicher ist, sowas auf nen Arduino zu programmieren mit Lösung zu den oben erörterten Problemen, oder eine Hardware weiß, die das schon kann, wo ich nur Potis und Taster anschließen muß, der würde mir damit sehr helfen.
Tim J. schrieb: > Wenn der Motor stoppt, ist > das immer ein Bereich indem er sich aufschwingt.Ich höre also deutlich > ein Schwingungsfeld. Die Schwingungen sind das Problem; der Motorstrom könnte eher sogar zu hoch gewählt sein. Schlecht programmierte Arduino Software tut ihr Übriges. Kein direkter Vorwurf an der Programmierer, sondern an das Zusammenklicken irgendwelcher verborgener "LIBs".
Tim J. schrieb: > Reicht denn eine Leadshine DM542EU Digital mit 4A Spitze aus Wenn du die volle Leistung aus den Motoren bei maximal möglicher Drehzahl holen willst, sollte der Schrittmotortreiber mindestens 6Arms=8.5Apeak bei 80 bis 150V vom Netzteil (aus dem man dann für 3 Achsen keine 8.5*6 Spulen Ampere braucht, sondern mit 600W hinkommt). Natürlich kann man die Motore auch mit weniger Strom fahren, sie werden dann nicht mehr 80 GradC wärmer als die Umgebung und leben länger, aber man hätte nutzlos viel Geld ausgegeben für die kräftigen Motore wenn es auch weniger Leistung täte).
Tim J. schrieb: > Hey Timo, > guter Tip, das könnte echt sein, das die billig sind, hab sie geschenkt > bekommen und es steht nichtmal ne Marke drauf. > Hier mal die Bilder! Wie gesagt. Ich würde mal ein Multimeter mit RMS in die eine Motorphase hängen und den Strom mal messen wenn alle DIP-Schalter für die Stromeinstellung an der Endstufe auf ON stehen (4,0A RMS). Mich würde nicht wundern, wenn noch nicht mal die 4A da rauskommen. Die Software hab ich noch gar nicht angeschaut, aber alle deine Anforderungen lassen sich mit der AccelStepper-Lib mit dem Arduino verwirklichen.
Hey Timo, wenn du sagst, das sich alles mit der genannten Lib realisieren lässt, könntest du sowas für Geld programmieren?
m.n. schrieb: > Die Schwingungen sind das Problem; Seh ich auch so. So ein Motor kann normalerweise auch 1000U/min und mehr wenn alles passt. Das alles passt beinhaltet eine ausreichende Spannung um jeden Schritt schnell genug zu bestomen und insbesondere eine gute mechanische Anbindung, und zwar ist eine mechanische Trägheit erforderlich. Ich vermute, dass Letzteres hier nicht gegeben ist, auch eine flexible Anbindung ist tückisch. Ist der Motor nämlich quasi "lastfrei", kommt es bei der Bestromung zur sehr schnellen Beschleunigung des Rotors. Während die Spule noch bestromt ist, bewegt sich der Rotor über die Ruhelage raus und wird infolge wieder abrupt abgebremst, bewegt sich sogar zurück in Richtung Ruhelage und darüber hinaus, bis der Treiber in den nächsten Schritt übergeht. Beim Auframpen kommt man irgendwann in eine Geschwindigkeit rein, wo der Umschaltzeitpunkt genau dann erfolgt, während der Rotor im alten Schritt sich gerade rückwärts bewegt, vielleicht sogar noch hinter der alten Ruhelage ist. Der Rotor ist nun zu weit weg von der neuen Ruhelage und bewegt sich sogar noch in die falsche Richtung, es kommt zum Schrittverlust. Also einfach mal testweise eine Schwungmasse auf dem Motor montieren und schauen, ob es dadurch besser wird.
> das immer ein Bereich indem er sich aufschwingt.Ich höre also deutlich > ein Schwingungsfeld. Hast du Umkehrspiel in den Achsen deiner Maschine? Dann laeuft der Motor wohlmoeglich leer und in Resonanz. Du koenntest mal probieren etwas Masse auf die Motorachse zu machen um zu schauen ob das etwas veraendert. Olaf
Eine einfache Schwungmasse besitzt den Nachteil, dass sie keine überschüssige Energie absorbiert. Es gibt spezielle Dämpfer, die so aussehen wie Schwungmassen, aber mit einer geeigneten Masse gefüllt sind, z.B. hier: https://www.orientalmotor.de/Products/Stepper_motors/Accessories/Accessories/Dampers/ https://sg.misumi-ec.com/vona2/detail/221000231753/?rid=rid3
Maxe schrieb: > m.n. schrieb: >> Die Schwingungen sind das Problem; > > Seh ich auch so. So ein Motor kann normalerweise auch 1000U/min und mehr > wenn alles passt. Das alles passt beinhaltet eine ausreichende Spannung > um jeden Schritt schnell genug zu bestomen und insbesondere eine gute > mechanische Anbindung, und zwar ist eine mechanische Trägheit > erforderlich. > > Ich vermute, dass Letzteres hier nicht gegeben ist, auch eine flexible > Anbindung ist tückisch. Ist der Motor nämlich quasi "lastfrei", kommt Hallo Maxe, danke für deine Erläuterung, das war sehr anschaulich und plausible, danke! Also ich habe Trapezspindeln und Schwalbenschwanz Führungen. Das bedeutet, wenn nach nem Losbrech-Moment alles in Bewegung ist, ist die Trägheit ziemlich gleichbleibend. (Das Losbrech Moment ist übrigens kein Problem, da ich ja immer langsam anfahre und hier der Motor ja noch volle Power hat. Einzig labil ist evtl. der HDT Zahnriemen. Aber der ist eigentlich auch fest gespannt.
Hast Du den Strom mal reduziert? Oder anders herum, fange mit kleinem Strom an und steigere ihn. Diese "Spielerei" ist doch in fünf Minuten erledigt und gibt Dir eine Einschätzung, was für Deine Mechanik sinnvoll ist. Erfahrungsgemäß ist es ein Fehler, einfach nur blind alles auf Maximum zu stellen.
Also die verschiedenen Stromstärken haben keinen erkennbaren Unterschied gemacht, außer, das im langsameren Betrieb hier und da dann man ein Schritt durchgerutscht ist.
Ich hab mal ein Video angehängt. Warum sich das so komisch anhört, hängt mit dem Handrad zusammen, hier ist der Knauf zum Kurbeln natürlich drehend gelagert und wikr bei den Schwingungen wie ein Resonanzkörper, er verstärkt die Schwingungen in der Maschine bzw. lässt diese deutlich hören.
Tim J. schrieb: > Also ich habe Trapezspindeln und Schwalbenschwanz Führungen. Das > bedeutet, wenn nach nem Losbrech-Moment alles in Bewegung ist, ist die > Trägheit ziemlich gleichbleibend. (Das Losbrech Moment ist übrigens kein > Problem, da ich ja immer langsam anfahre und hier der Motor ja noch > volle Power hat. Einzig labil ist evtl. der HDT Zahnriemen. Aber der ist > eigentlich auch fest gespannt. Auf das Losbrechen kommt es nicht an, wenn der Motor drehzahlmäßig aussteigt, hat man ja schon eine gewisse Drehzahl. Aber genau der Zahnriemen ist ein kritisches Element, was die Resonanz angeht. Auch die lange Spindel kann sich resonant verwinden. Du bekommst ja bei etwa 150/min Probleme, also bei 200Schritten*150/min = 30000 Schritte/min = 500 Schritte/sek. Also 500Hz, da reichen schon kleine Elastizitäten um in eine Resonanz zu kommen. Ich würde den Motor ausbauen und ohne Last testen. Wahrscheinlich kommt er bei ähnlich niedriger Drehzahl aus dem Tritt. Anschließend ebenfalls ausgebaut mit einer Schwungmasse testen. Dann weiß man mehr.
500 Steps/Sekunde müßte aber locker die Einschaltfrequenz sein. Ist ne Weile her das ich Motore für diese Anwendung auf einem Prüfstand hatte, da waren es glaub 1kHz Startfrequenz. Bremsscheibe dran und Drehmoment per elektr. Waage an den PC welcher auch Motor und Bremse steuerte. Ein am Parallelport angedockter 8052 war dann für die Rampe zuständig und beschleunigte den Motor mit Bremsscheibe auf bis zu 15KSteps/s, zügig und am oberen Ende mit einem sanften Verlauf zu konstanter Geschwindigkeit. Wichtig dabei ist die präzise ruckfreie Verkürzung der Impulspause. Je schneller der Motor dreht desto empfindlicher reagiert er auf Jitter und reißt schnell ab. Ein Poti per Handrad dürfte da suboptimal sein, es sei den der Kontroller nimmt das nur als SOLL und berechnet dann IST.
Tim J. schrieb: > Ich hab mal ein Video angehängt. Ich höre ... dass die Drehzahl nicht stufenlos ansteigt. Die Rampe ist also in Wirklichkeit eine Treppe mit deutlichen Stufen. Jede dieser Stufen bedeutet für den armen Motor eine fast unendlich hohe Beschleunigung. Ich sehe ... im Programm_V1.ino in Zeile 282 ein
1 | delay(125); |
das nach jedem Einlesen des Potiwerts aufgerufen wird. Die Schrittfrequenz wird dadurch maximal 8-mal pro Sekunde aktualisiert. Egal, wie zitterfrei deine Hand am Poti dreht, ergeben sich daraus immer Stufen in der Drehzahl. Schmeiß diesen unsinnigen Delay raus und probiere es noch einmal. BTW: Seit wann approximiert man eine Kehrwert- durch eine e-Funktion? Genau das geschieht nämlich in Zeile 307 bei der Umrechnung der durch das Poti vorgegebenen Drehzahl (bzw. Frequenz) in eine Periodendauer für den Timer:
1 | ergebnis = a + exp(b*(c-var)); |
Allerdings ist das nicht die Ursache für dein Problem, auch wenn es maximal unsinnig ist.
Hallo Yalu, Hallo zusammen, vielen Dank für die Hinweise, ich denke ich werde das Programm auf der Basis von der AccelStepper LIB neu schreiben lassen und mir mal vernünftige Endstufen holen. Wenn das getan ist, sehen wir weiter. Vielen Dank nochmal für euer Wissen! Schönes Wochenende euch, Gruß Tim
Damals habe ich mit dem Entwickler von PCDreh/PCFräsen einiges gemacht. Da waren auch zahlreiche Deckel Maschinen dabei die dann zur CNC Fräse wurden. Da braucht man doch nichts mehr entwickeln lassen, alles seit Dekaden verfügbar, getestet und zuverlässig am Laufen.
Hallo "NichtWichtig", Matthias Potthoff, der Autor von PC-Dreh ist bereits vor Jahren verstorben. Die Software ist leider seit dem nicht mehr verfügbar, das Bedienkonzept war sehr interessant, weil durch die Anwender-Brille gedacht. So wie Tim die Bedienung haben will, nämlich ohne PC mit genau diesem Bedienkonzept, wird es das von der Stange nicht geben. Mit freundlichen Grüßen Thorsten Ostermann
Ja leider, sind bereits 10 Jahre das Potti den Kampf verloren hat. Und selbst in den letzten Wochen hat er die Ruhe im Krankenbett noch genutzt um seine Software mit coolen Features zu erweitern. R.i.P. In wie weit das noch erhältlich ist - keine Ahnung. http://www.mobasi.com/software/pcdreh-fraesen-plus.php Aber das soll auch nur als Beispiel dienen, es gibt sicher weitere bewährte Produkte die tuen was gefordert ist. Das erzeugen der Impulse ist nicht ohne wenn man schnell und stark sein will. Alle paar ms mal einen neuen Wert berechnen ist nicht. Man muß bei jedem Impuls berechnen wie weit der nächste entfernt sein muß. Nur so lassen sich Geschwindigkeiten erreichen die über Standgas hinaus gehen. Kann mich noch dran erinnern wie Potti die Kinnlade runter klappte als er seinem Prüfling mit HighTorqe Stepper zusah wie er von 0 auf 14000 Impulse/s beschleunigte. Seine DOS Testsoftware kam nur bis max 3000 Hz und dann war Ende, Schritttotalverlust weil dort die Beschleunigung mit steigender Geschwindigkeit immer größer wurde. Das geht aber nur wenn die Impulse fehlerfrei aneinander gereiht werden und die Kurve keine Kanten/Knicke hat, also am oberen Ende sanft zu konstanter Geschwindigkeit übergehen. Ich hatte damals das EEPROM des µC genutzt um eine per PC Software berechnete Tabelle dort abzulegen die dann für die Rampe hergenommen wurde. Also am PC grafisch die Zielkurve designen und dann daraus den Table berechnen und speichern.
Tim J. schrieb: > vernünftige Endstufen holen. Hat der Motor im Stand ein hohes Haltemoment wie erwartet? Wenn ja, wozu dann eine andere Endstufe? Alles neu zu kaufen, löst selten die Probleme. Tim J. schrieb: >> http://mino-elektronik.de/Generator/takte_impulse.htm#bsp3a > > Danke, aber das Programm hab ich ja schon! Das Programm hast Du offensichtlich noch nicht. Nachfolgend finden sich auch Arduino-Beispiele mit Rampen, wozu Du meine Bankverbindung nicht kennen mußt. Ich gebe sie Dir aber gerne ;-)
Nachtrag zum meinem obigen Beitrag: So, wie Timer1.initialize() implementiert ist, https://github.com/PaulStoffregen/TimerOne/blob/master/TimerOne.h muss bei jeder Änderung der Schrittfrequenz mit einem Phasensprung des Signals gerechnet werden, der den Motor bei höheren Drehzahlen u.U. ebenfalls aus dem Tritt bringen kann. Evtl. soll der oben von mir kritisierte Delay verhindern, dass solche Phasensprünge zu schnell aufeinanderfolgen. Dass durch diese Maßnahme Frequenzsprünge entstehen, die sogar eher noch kritischer sind, wurde dabei wohl übersehen. Es lohnt sich also auf jeden Fall, die Software gründlich überarbeiten zu lassen, am besten nicht durch einen Arduino-Experten, sondern durch jemanden, der sich in der zugrundeliegenden Hardware (AVR) gut auskennt. Um zu testen, wie sich der Motor bei einem sauberen Schrittsignal verhält, könntest du statt des Mikrocontrollers auch ganz klassisch einen Oszillator mit einem NE555 o.ä. aufbauen. Da sind Frequenz- und Phasensprünge schon von vornherein ausgeschlossen.
Bitte zeig uns endlich die Freilaufdioden der Endstufen. Das könnte die Drehmomentschwächung bei hohen Drehzahl erklären.
m.n. schrieb: > Das Programm hast Du offensichtlich noch nicht. Nein, ich meinte, ich habe schon ein Programm, aber nicht genau das.
max123 schrieb: > Bitte zeig uns endlich die Freilaufdioden der Endstufen. Das könnte die > Drehmomentschwächung bei hohen Drehzahl erklären Wo finde ich den die Freilaufdioden? Aufschrauben und Foto machen?
Tim J. schrieb: > max123 schrieb: >> Bitte zeig uns endlich die Freilaufdioden der Endstufen. Das könnte die >> Drehmomentschwächung bei hohen Drehzahl erklären > > Wo finde ich den die Freilaufdioden? Aufschrauben und Foto machen? Wenn Dir einer schreibt, Du sollst alle Löstellen nachlöten, machst Du das dann auch? Fall doch nicht auf jeden Freitags-Quatsch rein. Tim J. schrieb: > m.n. schrieb: >> Das Programm hast Du offensichtlich noch nicht. > > Nein, ich meinte, ich habe schon ein Programm, aber nicht genau das. Mit dem Programm, was ich Dir vorgeschlagen habe, kann die Drehzahl feinfühlig ohne Rucken eingestellt werden. Ich denke, Du hast es Dir überhaupt nicht angeschaut und die Beschreibung dazu gelesen. Hast Du denn das Haltemoment von Motor überprüft? Wohl auch nicht. Da würde man sofort merken, ob der Phasenstrom hoch oder niederig ist. Gut, kaufe alles neu und melde Dich in 4 Wochen mit dem gleichen Problem wieder.
Ich bin Laie in dem Bereich und versuche zu verstehen. Klar kann man den Lehrling losschicken die Ausgleichsgewichte für die Wasserwaage zu holen, aber das war noch nie meine Art von Humor. Ich hatte das mit den Endstufen so verstanden, das es nicht nur auf die durchgeleitet Stromstärke ankommt, sondern auch wie sauber die Schritte verarbeitet werden. Da kann ich an meinen Billigendstufen rummessen, aber weil ich die Maschine mein Leben lang haben will, dachte ich, es spricht nichts dagegen, daß ich gleich was Vernünftiges kaufe. Das ist ja kein blindes Rumkaufen, sondern die Entscheidung, die Billig-Endtsufe gegen Qualität zu ersetzen und dabei diese Problem mit Strom und Schrittverarbeitung von vornherein zu eleminieren. Das von dir verlinkte Programm habe ich nur überflogen und dem Programierer weiter geleitet. Er hat dazu noch nichts gesagt, also hab ich dazu auch noch kein Feedback. Warum so genervt? Ich schreibe freundlich, bin dankbar und bedanke mich für eure Anregungen und Wissen und hab einfach auch viel Anderes zutun, daher kann ich nicht alles sofort testen. Wenn das hier jemanden nervt, dann sorry, das war nicht meine Absicht. Gruß und ein sonniges Wochenende, Tim
Tim J. schrieb: > Das von dir verlinkte Programm habe ich nur überflogen und dem > Programierer weiter geleitet. Er hat dazu noch nichts gesagt, also hab > ich dazu auch noch kein Feedback. Ich hatte Dich so verstanden, daß Du zumindest auf Arduinoebene Programme nachvollziehen und anpassen kannst. Bei der .ino-Datei müßten nur die min.-max.-Geschwindigkeiten geändert und die Verdrahtung von Poti und Taktausgang angepaßt werden. > Da kann ich an meinen Billigendstufen rummessen, > aber weil ich die Maschine mein Leben lang haben will, dachte ich, es > spricht nichts dagegen, daß ich gleich was Vernünftiges kaufe. Wenn die Stromregelung funktioniert und die Mikroschritte (die solltest Du auch unbedingt verwenden) richtig umgesetzt werden, dann ist das Teil völlig ausreichend. Du hattest ja auch kleine Ströme eingestellt, bei denen das Drehmoment des Motors - wenn ich Dich richtig verstanden habe - auch schon ausreichend war. Bei der Endstufe sehe ich somit keinerlei Handlungsbedarf. Wenn ich den Motor nebst Treiber hier zu liegen hätte, würde ich ihn zunächst von der vorhandenen Mechanik abtrennen, in einen Schraubstock einspannen, die Achse mit einem festen Tuch umwickeln, so gut wie möglich festhalten und dann die Schrittfrequenz verändern. Da merkst man die Kraft (er sollte nicht zu stoppen sein) und Eigenresonanzen, die man durch stärkere Last auch noch reduzieren kann. Erst, wenn das erwartungsgemäß funktioniert, kommen Tests mit der Mechanik.
Alles klar, ich werde das mal so weitergeben. Es führen ja bekanntlich viele Wege nach Rom. Ich werde wie hier mehrfach angesprochen, die Software mit den schon gut laufenden Protokollen optimieren lassen und gute Enstufen verwenden. Der Motor ist tief in der Maschine verbaut, ich muss den Kran in der Halle aktivieren. Muss die Maschine anheben, etc. Viel einfacher ist es für mich die Übersetzung zu ändern von 2,5zu1 auf 1zu1. Dann umschiffe ich das Problem, das ich die Software und Kurven bei jeder höheren Geschwindikeit perfekt an die Charakteristik der Maschine anpassen muss. Ich bin nicht weit entfernt von meiner Wunschgeschwindigeit und bei 1zu1 komme ich evtl. nichtmal mehr in den kritischen Bereich, der aktuell immer erreicht wird. Und die Auflösung im langsamsten Bereich passt dann auch immernoch. Ich werde berichten und ein Video machen, wenn es fertig ist. Danke nochmal!
m.n. schrieb: > Ich hatte Dich so verstanden, daß Du zumindest auf Arduinoebene > Programme nachvollziehen und anpassen kannst. Bei der .ino-Datei müßten > nur die min.-max.-Geschwindigkeiten geändert und die Verdrahtung von > Poti und Taktausgang angepaßt werden. Ich hatte schon weiter oben geschrieben, das ich Taster für links und rechtslauf haben möchte und den Poti nur zum Verstellen der Geschwindigkeit. Wenn ich das richtig überflogen habe, hat in dem Programm der Poti eine Mittelstellung und dreht je nach Benutzung links oder rechts und "dimmt" dabei hoch. Außerdem hat das geschaffene Program die Nullpunktspeicherung, sowie das Anfahren dieses mit Geschwindigkeitssteuerung über einen anderen Poti. Nur einfach genau das Programm nehmen geht eben nicht, es sei denn ich hab beim Überfliegen die genannten/gewünschten Funktionen übersehen. Aber der Programmierer ist willig zu lernen und man kann evtl. das Gute mit dem Schönen verheiraten. Gruß Tim
Tim J. schrieb: > Ich hatte schon weiter oben geschrieben, das ich Taster für links und > rechtslauf haben möchte und den Poti nur zum Verstellen der > Geschwindigkeit. Dann brauchst du eine Steuerung, die anhand der Tastenkommandos automatisch in Beschleunigungs- und Bremsrampen generiert, also harte Geschwindigkeitsänderungen unterbindet. > Wenn ich das richtig überflogen habe, hat in dem Programm der Poti eine > Mittelstellung und dreht je nach Benutzung links oder rechts und > "dimmt" dabei hoch. Diese Lösung hätte den Vorteil, dass bei nicht zu heftigem Reißen am Poti, die Rampen quasi durch die Art der Bedienung geeignet vorgegeben werden.
Wolfgang schrieb: >> Wenn ich das richtig überflogen habe, hat in dem Programm der Poti eine >> Mittelstellung und dreht je nach Benutzung links oder rechts und >> "dimmt" dabei hoch. > > Diese Lösung hätte den Vorteil, dass bei nicht zu heftigem Reißen am > Poti, die Rampen quasi durch die Art der Bedienung geeignet vorgegeben > werden. Rampen entstehen schon durch die Filterung der Potiwerte filter_a() und filter_b(), wobei man diese noch verlangsamen kann. Weiter unten im Text gibt es auch Programme, die mit einem Arduino Rampen generieren, auch mit RS232-Steuerung und als lustige Demonstration "stepper_A4982.ino", das einen Stepper mit Schrittfrequenzen einer Tonleiter ansteuert. Ein Lautsprecher täte es auch ;-) Tim J. schrieb: > Nur einfach genau das Programm nehmen geht eben nicht, es sei denn ich > hab beim Überfliegen die genannten/gewünschten Funktionen übersehen. Es geht doch ersteinmal darum, zu ergründen, ob bei Deinem Aufbau mechanische, elektrische oder programmtechnische Probleme vorliegen. Das, was Du als Zusatzfunktionen brauchst, sind ein Klacks.
Hallo zusammen, nun sind die neuen Endstufen da! (Stepperonline DM860T V3.0) Tja, was soll ich sagen, ich bekomme ne richtig schnelle Drehzahl hin. Muss mit dem Poti zwar sehr feinfühlig hochdrehen, da hier in der Programmierung ja immernoch Treppen drin sind, aber irgendwie sind die problematischen Schwingungsbereiche fast weg. Nur beim hochdrehen/runterdrehen des Potis schwing es noch, aber wenn er in einer Geschwindigkeit angekommen ist, ist alles prima :) Dann werde ich mir jetzt mal ein paar Rampen einprogrammieren lassen, damit das was am Ende vom Video passiert ein Ende hat und dann ist alles gut. Also vielen Dank nochmal für eure Zeit und Hilfe. Schönen Tag euch, Gruß Tim
Tim J. schrieb: > Hallo zusammen, nun sind die neuen Endstufen da! Hättest Du Lust, mir Deine alte Endstufe zuzuschicken? Mich würde interessieren, ob sie Tatsächlich defekt ist oder ggf. nur ein Anschlußfehler vorlag. Entsorgen könnte ich sie ja immer noch. Reine Neugierde.
Ja klar, wohin soll ich die schicken? Schreib mir doch ne P.M. mit deiner Adresse! Gruß Tim
m.n. schrieb: > Ist unterwegs! Stell mal bitte ein Foto vom Treiber-IC und ggf. von den Mosfets hier ins Forum rein, wenn du sie bekommen hast. Würde mich interessieren was die da verbaut haben.
Bei 150 RPM halbiert sich bereits das Drehmoment, bei 250 RPM ca nur noch 1/3. Mit 2 phasigen sind nunmal keine "hohen" Drehzahlen möglich. Bei 3..4..5 phasigen wird es bissel besser.
Falls GRBL nciht bekannt ist: Was für mich zum testen von Endstufen und Schrittmotoren zum Basteln gut funktioniert ist GRBL als Firmware auf einem Arduino Nano und dazu GRBL-Plotter am Rechner um die Einstellungen bequem zu machen. Damit kann man sehr einfach die Rampen und Geschwindigkeiten testen die ein Aufbau aus Treiber-Motor-Mechanik hinbekommt. Das Timing-KnowHow was in GRBL steckt muss man dann nicht alles selber nachprogrammieren (es sei denn DAS ist ein gewünschter Teil des Hobbys). Ich für mein Teil will die Mechanik bauen und mit Schrittmotoren testen und greife daher auf fertige Ansteuerung zurück.
Angehängte Dateien:
-

Leadshine_MD556.jpg
230 KB
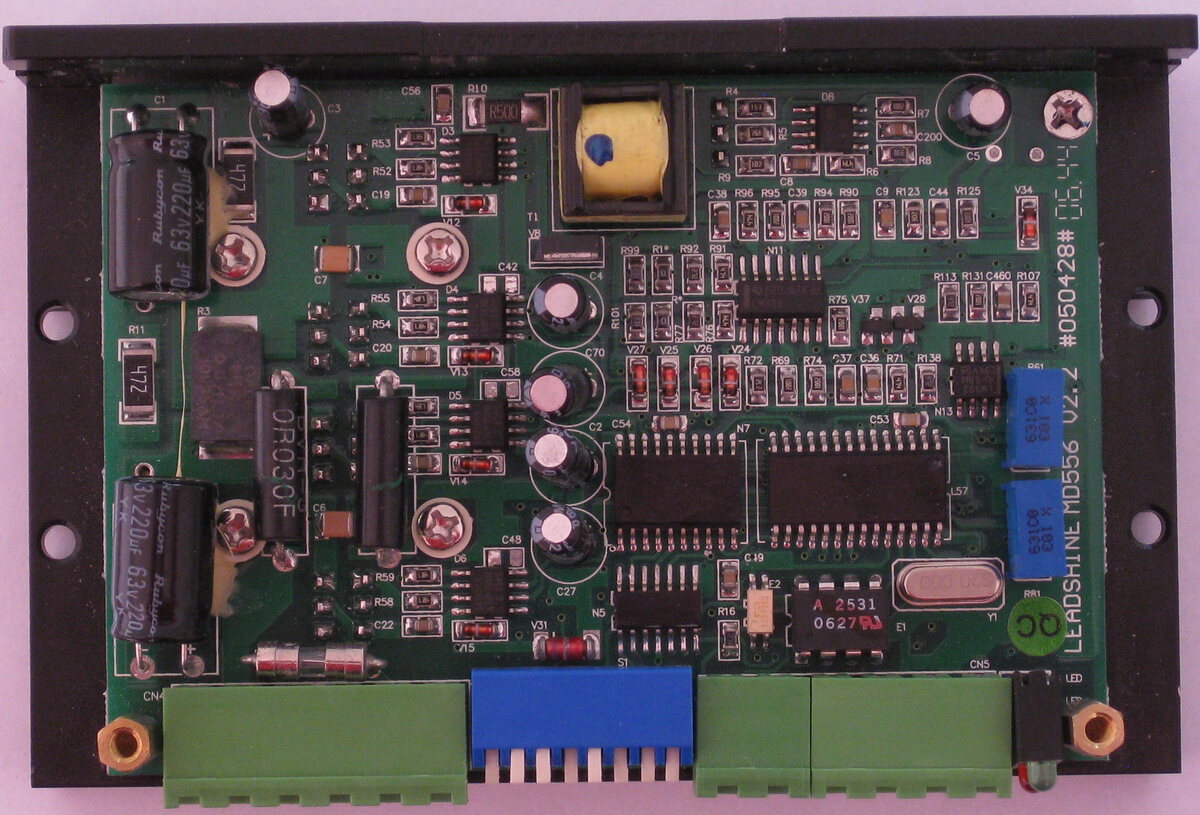
Die Endstufe ist heute bei mir angekommen. Mangels Datenblatt kann ich die Funktion des ENA-Eingangs nicht nachvollziehen: mit angelegten 5 V, wird die Endstufe abgeschaltet. Das würde ich genau anders herum erwarten. Vielleicht ist hier etwas nicht in Ordnung. Angeschlossen habe ich hier einen uralten Motor (200 Schritte/U) mit vier Wicklungen 1,4 V / 1,9 A, von den jeweils zwei in Reihe geschaltet sind. Die kleinste einstellbare Schrittzahl/Umdrehung ist 400 (Halbschritt). Als Versorgungsspannung habe ich 32 V genommen. Mit dem oben verlinkten Arduino-Programm und Poti läßt sich die Schrittfrequenz bis auf 20000 Hz einstellen (mehr schafft der Arduino UNO nicht). Das sind dann 50 Umdrehungen/s oder 3000 UpM und der Motor schnurrt selbst bei dem kleinsten Phasenstrom von 1 A lustig vor sich hin! Auch mit anderen Phasenströmen und unterschiedlichen Mikroschritten gibt es keine Ungereimtheiten. Anbei noch ein Foto der Platinenoberseite: Leadshine MD556 von KW44/2006. Auf der Unterseite befinden sich auch noch SMD-Bauteile und 8 x TO220 Transistoren auf der Kühlrippe, die ich aber nicht abgeschraubt habe. Insgesamt gibt es an dem Teil nichts zu meckern. Nochmal zu ENA: Bei Reichelt werden ähnliche Schrittmotortreiber von ACT angeboten, zu denen es auch Datenblätter gibt. Zu ENA findet man dort Beschreibungen wie "only connected when used" oder "offline enable signal input".
m.n. schrieb: > Mangels Datenblatt kann ich > die Funktion des ENA-Eingangs nicht nachvollziehen: http://www.leadshine.com/UploadFile/Down/DM556m.pdf
m.n. schrieb: > mit angelegten 5 V, > wird die Endstufe abgeschaltet. Das würde ich genau anders herum > erwarten. > Vielleicht ist hier etwas nicht in Ordnung. Wieso? Weil in der Elektronik oft mit negativer Logik gearbeitet wird? Hier geht es aber um industrielle Steuerung, da ist Sicherheit ein wichtiger Gesichtspunkt. Da heißt: Strom fließt, inclusive Signalleitung alles in Ordnung. Strom weg: Da ist was oberfaul!!! Das gilt für Alarmkontakte in Alarmanlagen ganz genauso. Gruß Klaus (der soundsovielte)
Klaus S. schrieb: > Hier geht es aber um industrielle Steuerung, da ist Sicherheit ein > wichtiger Gesichtspunkt. Da heißt: > Strom fließt, inclusive Signalleitung alles in Ordnung. > Strom weg: Da ist was oberfaul!!! Wenn Du etwas von Sicherheit schreibst, dann darf sich die Ansteuerung bei defektem Kabel nicht selber aktivieren sondern hat still zu bleiben.
Negative Logik ist normal. EN könnte glaube ich einen Pullup auf 5V haben, dass er unbeschaltet direkt aus ist. Normal ist da direkt ein OK hinter den Eingängen. Insgesamt hat mich überrascht, dass da Leadshine draufsteht. Haben die eine alte Platine von Leadshine in ihre Gehäuse gemacht und verkaufen das dann umgebrandet weiter oder ist der Treiber echt so alt (2006) ? Hab schon gedacht, dass es eine gefälschte Leadshine sein könnte, aber dann müssten auch die Rubycon- Elkos gefälscht sein. Ob die da so viel Aufwand betreiben?. Außerdem sieht es auch so ganz ordentlich aus. Wenn es eine Leadshine ist, hast einen Schnapper gemacht.
m.n. schrieb: > MD556 != DM556m aber bezüglich ENA aufschlussreich. Meinetwegen auch so: https://cnctar.hobbycnc.hu/VarsanyiPeter/CNC%20vezerles%20-%20leptetomotorral/LeadShine%20-%20China%20-%20Microsteppes%20Bipolaris%20Vezerlok/MD556.pdf gibt sich aber nicht viel ... :-)
Hugo H. schrieb: > Meinetwegen auch so: > > https://cnctar.hobbycnc.hu/VarsanyiPeter/CNC%20vezerles%20-%20leptetomotorral/LeadShine%20-%20China%20-%20Microsteppes%20Bipolaris%20Vezerlok/MD556.pdf > > gibt sich aber nicht viel ... :-) Na Dich kann man schicken ;-) Das Blatt ist aus dem Jahre 2000 und beschreibt V1.0. Die hier liegende Version ist V2.2, was dann mit 2006 korreliert. Timo N. schrieb: > Negative Logik ist normal. EN könnte glaube ich einen Pullup auf 5V > haben, dass er unbeschaltet direkt aus ist. Es ist keine Frage ob negative oder positive Logik verwendet werden soll. Das ergibt sich durch die externe Beschaltung. Es irritiert mich, daß das Teil im Einschaltzustand aktiv ist. Aber egal - andere Länder, andere Sitten.
m.n. schrieb: > Es ist keine Frage ob negative oder positive Logik verwendet werden > soll. Das ergibt sich durch die externe Beschaltung. Es irritiert mich, > daß das Teil im Einschaltzustand aktiv ist. Aber egal - andere Länder, > andere Sitten Ja, dann haben die einen Pulldown. Übrigens hier auch: https://www.ti.com/lit/ds/symlink/drv8825.pdf ein nEnable -Eingang mit Pulldown. Also standardmäßig aktiv.
Timo N. schrieb: > Ja, dann haben die einen Pulldown. Nein! Die Eingänge haben galvanisch trennende Optokoppler ohne interne Spannungsversorgung.
m.n. schrieb: > Das Blatt ist aus dem Jahre 2000 und beschreibt V1.0. Die hier liegende > Version ist V2.2, was dann mit 2006 korreliert. Woran erkennst Du (für welche Platinen-Version das ist) das denn bitte?
m.n. schrieb: > Es irritiert mich, > daß das Teil im Einschaltzustand aktiv ist. Aber egal - andere Länder, > andere Sitten. Nein, nix andere Sitten, das sind die bei uns geltenden Sicherheitsbestimmungen. Nie was davon gehört? Drahtbruch führt zur Abschaltung !!!!! Meinen Eintrag weiter oben offenbar nicht richtig verstanden? darum nochmal ausführlicher: Ein potentialfreier Eingang erkennt keinen Spannungspegel, er braucht eine Spannungsdifferenz und den zugehörigen Strom. Ist im Datenblatt aureichend ausführlich dargestellt: Vorwiderstand 270 Ohm plus Optokopplerdiode, Sogar der benötigte Strom ist angegeben: 10 mA. Und ein Schaltungsvorschlag ist dabei: Plus-Anschlüsse alle an 5Volt vom Controller und die Minus-Anschlüsse an die Controlleraugänge. Und schon ist wie von Zauberhand die negative Logik da. Gruß Klaus (der soundsovielte)
Klaus S. schrieb: > Nein, nix andere Sitten, das sind die bei uns geltenden > Sicherheitsbestimmungen. > Nie was davon gehört? Drahtbruch führt zur Abschaltung !!!!! Das ist in solch einer Verallgemeinerung nicht korrekt. Ein schwerwiegender Fehler, z.B. Leiterbruch, muss zur Einnahme eines sog. sicheren Zustandes führen. Das kann in diesem Fall eine Abschaltung sein, aber bei bestimmten Anwendungen darf eben nicht blind abgeschaltet werden, z.B. bei lebenserhaltenden Systemen (Medizintechnik, Avionik, Kran, Aufzug).
m.n. schrieb: > Nein! Die Eingänge haben galvanisch trennende Optokoppler ohne interne > Spannungsversorgung. Oben schreibe ich selbst, dass da ein OK an den Eingängen sitzt und dann Pulldowns.... sooo dumm. Ich war gedanklich bei den 3D-Drucker Treibern. Die haben sowas nicht.
Andreas S. schrieb: > Das ist in solch einer Verallgemeinerung nicht korrekt. Ich glaub. es ist noch viel schlimmer und ich muß sehr um Entschuldigung bitten. Es steht im Datenblatt zwar das Wort "Enable", es ist aber tatsächlich ein "Disable" und die Schaltung wird aktiv, ohne daß dort ein Signal anliegt. Insofern sind die Einwände von m.n auch aus meiner Sicht absolut berechtigt, da hab ich die entscheidende Bemerkung im Datenblatt übersehen und lag völlig daneben. Gruß Klaus (der soundsovielte)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.