Hi, ich betreibe einen Nema17 Stepper mit einem TMC2209 Treiber über einen ESP8266. Ich komme mit meiner 12V Versorgung nicht über eine Drehzahl von ca. 1 bis 1,5 1/s. Das entspricht etwa 200 bis 300 Steps pro Sekunde heruntergerecht auf Vollschritte. Je nach Microstep Einstellungen bin ich mal bisschen schneller oder langsamer, aber eine signifikante Veränderung kann ich nicht beobachten. Auch macht es scheinbar keinen Unterschied ob ich ihn langsam oder schnell oder gar nicht beschleunige. Bin ich hier mit der Spannung am Limit und muss auf 24V gehen? Wenn ich meinem 3D Drucker so zuschaue geht da noch einiges...
Du hast den einen Nema 17 den es gibt!? Hast Du eine Masse auf der Welle? Gruß Jobst
Jobst M. schrieb: > Du hast den einen Nema 17 den es gibt!? Ja, einen von stepperonline oder so. Habe leider nichts genaues dazu... > Hast Du eine Masse auf der Welle? Nicht viel, eine 3D gedruckte Riemenscheibe. Olaf schrieb: > Kuckst du hier: kuck ich, danke
Nochmal die Kernfrage: Der Motor kommt mir unheimlich langsam vor, kann das an der verhältnismäßig niedrigen Spannungsversorgung von 12 V liegen?
Olaf schrieb: > http://www.goetz-automation.de/Schrittmotor/Resonanzen.htm Wenn das mein problem wäre, dann müsste ich doch bei unterschiedlichen Microstep Einstellungen andere Resonanzfrequenzen treffen oder? Habe oft gelesen, dass schon Hand auf die Welle auflegen helfen soll. Selbst im eingebauten Zustand ähnlich wie bei einem 3D Drucker in der x oder y Achse wird er nicht schneller. Ich brauche kein high end, aber auch keine Schnecke. Kann ich ihn falsch anschließen, dass er eigentlich normal läuft, nur eben viel langsamer als erwartet? Kraft hat er ja eigentlich...
Tobias schrieb: > ich betreibe einen Nema17 Stepper mit einem TMC2209 Treiber über einen > ESP8266. > > Ich komme mit meiner 12V Versorgung nicht über eine Drehzahl von ca. 1 > bis 1,5 1/s Es kommt nicht auf den absoluten Wert der Spannung an, sondern wie hoch die Versorgungsspannung im Verhältnis zur Nennspannung des Motors ist. Außerdem kommt es natürlich auf den Strom drauf an, den du durch die Motorwicklungen schickst.
Tobias schrieb: > Bin ich hier mit der Spannung am Limit und muss auf 24V gehen? Wenn ich > meinem 3D Drucker so zuschaue geht da noch einiges... Oder noch viel höhere Spannungen. Die Induktivität der Wicklungen und die Gegen-EMK des drehenden Motors sorgen ja dafür, dass mit zunehmender Geschwindigkeit der Strom und damit das Drehmoment sinkt. Um eine Idee von der benötigten Spannung zu bekommen kannst du den Motor ja mal mit einem Akkuschrauber oder einer Bohrmaschine antreiben und die dabei erzeugte Wechselspannung messen. Bedenke, dass du dabei eine Effektivspannung angezeigt bekommst, und die Treiberschaltung mindestens den 3-fachen Spitze-Spitze-Wert liefern müsste.
Tobias schrieb: > Der Motor kommt mir unheimlich langsam vor, Ja nun, wenn man sich wundert, hilft ein Blick ins Datenblstt, da steht die erwartbare Geschwindigkeit bei optimaler Dämpfung mit drin als Diagramm, und eine Menge weiteres wissenswerte: https://www.orientalmotor.com/products/pdfs/2012-2013/A/usa_st_pk_motor_only.pdf Tobias schrieb: > einen von stepperonline oder so. Habe leider nichts genaues dazu... Tja nun, dem billigsten undokumentierten Schrott kaufen und sich dann wundern dass er die Ansprüche nicht erfüllt ist - logisch. Falls der Motor 12V Strangspannung hat, wird er an 12V nicht schnell sein, und eine Stromregelung für Mikroschritt ist auch nicht drin.
https://www.amazon.de/gp/aw/d/B00PNEQKC0 Das ist mein Motor, hab ihn endlich gefunden. https://www.omc-stepperonline.com/de/nema-17-bipolar-59ncm-84oz-in-2a-42x48mm-4draehte-w-1m-kabel-verbinder-17hs19-2004s1 https://wiki.fysetc.com/Silent2209/ Das die Treiberplatine. Ich habe Treiber <=> Motor A2 <=> A+ A1 <=> A- B1 <=> B+ B2 <=> B- angeschlossen. Wenn ich A+ und B+ tausche, dreht der Motor anders herum. Das ist zu erwarten und bestätigt, dass alles richtig angeschlossen ist oder?
Treiber <=> Motor A2 <=> A+ A1 <=> A- B1 <=> B+ B2 <=> B- Falls die Formatierung nicht nur bei mir bescheiden geworden ist. Ach ja, die Referenzspannung habe ich auf 2.5V was etwa 1.77A Motorstrom entspricht, laut deren Online Rechner. Mein Netzteil ist mit 2A angegeben.
Tobias schrieb: > Das ist mein Motor, hab ihn endlich gefunden Oh, wie die Erinnerunge wieder kommt. Der sollte sich bei 1000 Schritten pro Sekunde sehr wohl fühlen https://www.oyostepper.com/images/upload/File/17HS19-2004S1_Torque_Curve.pdf allerdings ist die Kurve mit 24V am Schrittmotortreiber aufgenommen worden. Bei 12V schafft er halt nicht mehr 4800, sondern vielleicht nur 3000 Impulse bevor das Drehmoment einbricht. Der Motor selbst hat 2.8Vrms Spulenspannung und bringt bei 2Arms volles Drehmoment, man stellt den Mikroschrittreiber also auf 2.8A. Wenn er die nicht bringt, sinkt das Drehmoment entsprechend. Deine Platine bringt die 2.8A angeblich gerade eben - ich befürchte aber sie überhitzt bei der Einstellung denn das sind Phantasiewerte.
MaWin schrieb: > 1000 Schritten pro Sekunde sehr wohl fühlen Das wäre ja schon min. das doppelte bis 10-fache. Und auch bei 12V noch ein vielfaches meiner Geschwindigkeit. Aber habe ich deiner/eurer Meinung nach die Motorwicklungen richtig verkabelt? Als Library verwende ich https://github.com/janelia-arduino/TMC2209/blob/main/src/TMC2209.cpp und AccelStepper. Einen Programmfehler schließe ich eigentlich aus...
Hat noch jemand eine Idee woran es liegen könnte, dass der Motor nur sehr gemächlich dreht? Sind die FYSETC Dinger vielleicht keine originalen TMC?
Tobias schrieb: > Hat noch jemand eine Idee woran es liegen könnte, dass der Motor nur > sehr gemächlich dreht? Du hast bereits vernünftige Antworten bekommen. Wenn sie dir nicht gefallen, dann werfe den ganzen Kram in den Müll und mache was anderes. Man kann Fehler nicht weg diskutieren.
Stefan ⛄ F. schrieb: > Man kann Fehler nicht weg diskutieren. Den möchte ich ja finden. Die Verkabelung sollte passen, hat bisher leider niemand bestätigen wollen. Die Datenblätter sagen, dass er schneller drehen müsste. MaWins Erfahrung mit /Skalierung auf 12V lässt auch schnellere Drehzahl vermuten. Wie gesagt, ich mache hier kein high end, aber irgendwas kommt mir spanisch vor.
Tobias schrieb: > Die Verkabelung sollte passen, hat bisher leider niemand bestätigen > wollen. Der Motor würde sich bei falscher Verkabelung gar nicht drehen oder falsch herum, was ja erst mal nicht dein Problem ist. Tobias schrieb: > Die Datenblätter sagen, dass er schneller drehen müsste. Dafür brauchst du wie gesagt mehr Spannung. Es ist üblich, den Treiber mit erheblich mehr als der Nennspannungs des Motors zu betrieben. Die Nennspannung bezieht sich auf den Stillstand mit DC. Beim Drehen werden die Spulen aber mit Wechselspannung angesteuert, so dass ihre Induktivität eine Rolle Spielt. Bei jedem Polungswechsel steigt der Strom nur langsam an. Noch bevor er das zulässige Maximum erreicht hat, willst du schon den nächsten Schritt machen. Also erhöht man die Spannung, damit der Strom schneller den maximalen Wert erreicht. Nur so kann man die höheren Drehzahlen überhaupt erreichen.
Tobias schrieb: > Als Library verwende ich > https://github.com/janelia-arduino/TMC2209/blob/main/src/TMC2209.cpp und > AccelStepper. Werden denn überhaupt Rampen benutzt? Deine max. Drehzahl ist wohl die Start-Stopp-Frequenz des Motors.
Stefan ⛄ F. schrieb: > Der Motor würde sich bei falscher Verkabelung gar nicht drehen oder > falsch herum, was ja erst mal nicht dein Problem ist. Ich hatte mal einen Stepper aus einem Tintenstrahldrucker und bei falschem Anschluss hat der sich auch gedreht, aber eben nur schwächer, daher meine Vermutung. Aber du hast recht, dafür hat er doch einiges an Drehmoment und Drehzahl. Jobst M. schrieb: > Foto vom Aufbau Wenn ich zuhause bin gerne > Hast Du ein Scope Analog Discovery 2 von digilent m.n. schrieb: > überhaupt Rampen Ja, aber: Tobias schrieb: > Auch macht es scheinbar keinen Unterschied ob ich ihn langsam oder > schnell oder gar nicht beschleunige. Stefan ⛄ F. schrieb: > Dafür brauchst du wie gesagt mehr Spannung Dann mach ich mich mal parallel auf die Suche nach einem 24V Netzteil oder bestelle eins.
Laptop Netzteil verfügbar? Die haben immerhin oft 19 Volt und ein paar Amp.
Tobias schrieb: > Dann mach ich mich mal parallel auf die Suche nach einem 24V Netzteil > oder bestelle eins. Meines Erachtens müßte er auch mit 12 V schon schneller drehen können. Sofern der Motor ohne Last betrieben wird, reduziere mal den Phasenstrom auf 0,5 A.
Angehängte Dateien:
-

DSC_0352.JPG
190 KB -

DSC_0351.JPG
240 KB

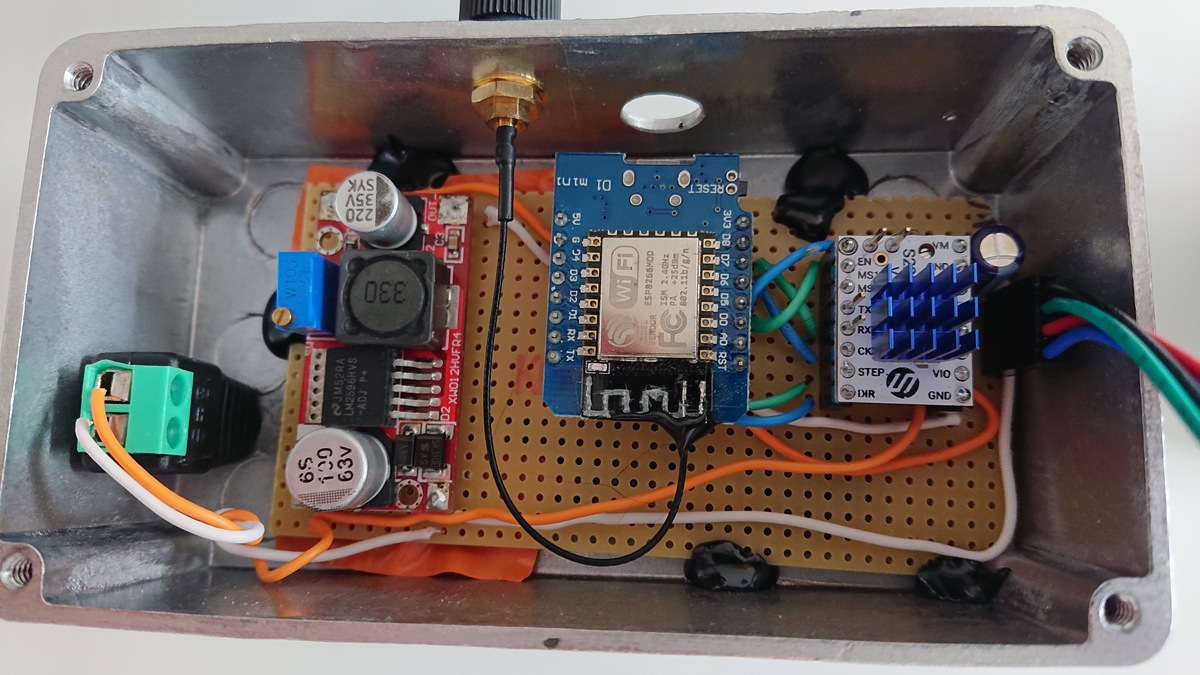
Jobst M. schrieb: > Foto vom Aufbau Hier mal Fotos, die Platine habe ich mit Heißkleber fixiert, auf Wunsch kann ich sie aber auch rausnehmen. Thomas schrieb: > Laptop Netzteil Leider nur noch mit USB C. m.n. schrieb: > Phasenstrom auf 0,5 A Das entspricht einer Referenzspannung von 0,7V, habe ich eingestellt, leider keine Änderungen im Verhalten.
Tobias schrieb: > Stefan ⛄ F. schrieb: >> Dafür brauchst du wie gesagt mehr Spannung Bei dem Motor steht etwas von 2.0A und 1.4Ω, was dann auf eine Nennspannung von 2.8V hinauslaufen würde. Dafür sollten 12V genug sein. Tobias schrieb: > https://www.amazon.de/gp/aw/d/B00PNEQKC0 > Das ist mein Motor, hab ihn endlich gefunden.
Tobias schrieb: > Dann mach ich mich mal parallel auf die Suche nach einem 24V Netzteil > oder bestelle eins. Du musst natürlich darauf achten, das bei stehenden Motor keine 24V an den Wicklungen liegen dürfen.
Harald W. schrieb: > stehenden Motor keine > 24V Heißt im Stillstand enable Signal wegnehmen, oder senkt CoolStep beteits die Spannung? Ich wüsste nur vom Strom...
Tobias schrieb: > Heißt im Stillstand enable Signal wegnehmen, Nein, heisst einen Treiber mit Stromregelung nehmen (und auf max. 2.8A einstellen), wie du ihn hast, was Harald nur nicht begriffen hat.
Harald W. schrieb: > Du musst natürlich darauf achten, das bei stehenden Motor keine > 24V an den Wicklungen liegen dürfen. einfach eine Konstantstromquelle wählen (max24V) mit 2A und an der Stromgrenze hoch beschleunigen!
Joachim B. schrieb: >> Du musst natürlich darauf achten, das bei stehenden Motor keine >> 24V an den Wicklungen liegen dürfen. > > einfach eine Konstantstromquelle wählen (max24V) mit 2A und an der > Stromgrenze hoch beschleunigen! Der vom TE verwendete Treiber TMC2209 enthält wohl bereits eine Strombegrenzung. Ich habe es versäumt, vor meiner Antwort das Datenblatt des ICs durchzulesen.
Tobias schrieb: > Hat noch jemand eine Idee woran es liegen könnte, dass der Motor nur > sehr gemächlich dreht? > > Sind die FYSETC Dinger vielleicht keine originalen TMC? Der TMC2209 ist immer der Gleiche. Nur die Beschaltung nicht. Da mußt erst auf der TMC-Platine herumlöten, wenn du da was einstellen willst. Theorie: Beitrag "Re: Industrielle [3D-Drucker] Bastelgrundlagen" Praxis : Beitrag "Re: Industrielle [3D-Drucker] Bastelgrundlagen" Will heißen, je nach TMC2209-Chip -Anbieter (hier Bigtreetech) kannst da 'böse Überraschungen' erleben. Das (sockelbasiert) ist rein Hardware-codiert.
Wolfgang schrieb: > Bei dem Motor steht etwas von 2.0A und 1.4Ω, was dann auf eine > Nennspannung von 2.8V hinauslaufen würde. Dafür sollten 12V genug sein. Den Motor könntest auch auf 60V hochdrehen, wenn du die Geschwindigkeit brauchst. Und für 60V das passende Netzteil mit Board hättest. Wie das genau funktioniert, hab ich nicht mehr rausgefunden, weil es mich nicht mehr interessiert hat, aber der Strom ist UNABHÄNGIG von der Spannung. Und die "V-Ref" beim Stepperdriver regelt bloß die Strombegrenzung (siehe Formel). Also die Kraft des Motors, nicht dessen Geschwindigkeit. Ja... eh klar. (?)
Joachim B. schrieb: > einfach eine Konstantstromquelle wählen (max24V) mit 2A und an der > Stromgrenze hoch beschleunigen! Das Wäre also sehr schön, wenn es so einfach wäre !
Rudi Ratlos schrieb: > Wäre also sehr schön, wenn es so einfach wäre ! als ich einen universal Schrittmotor Treiber baute mit dem Päärchen L297 und L298 da funktionierte es noch. https://www.sparkfun.com/datasheets/Robotics/L298_H_Bridge.pdf an VS darf doch bis +50V eingespeist werden ein Stino LM317 kann I_konst bilden https://elektro.turanis.de/html/prj153/index.html es gibt auch noch LM317HV
Joachim B. schrieb: > als ich einen universal Schrittmotor Treiber baute Das sind aber Schrittmotortreiber. Ich muß dir ehrlich sagen, nach meinen Recherchen würde ich nicht ums Verrecken mehr 'irgendeinen Strom' an einen Steppermotor anschließen. Und was diese 3D-Drucker-Boards anbelangt: Typ. Chinesendreck. Haltlose Behauptungen ohne Ende . Als ob es ausreichend wäre? irgendeinen 'Chip' irgendwo draufzulöten.
Harald W. schrieb: > Du musst natürlich darauf achten, das bei stehenden Motor keine > 24V an den Wicklungen liegen dürfen. Ich fürchte, du hast den TMC2209 nicht verstanden. Die Betriebsspannung darf bis zu 29V betragen und der Strom durch die Motorwicklungen wird vom IC geregelt. Der Stromregler mit der H-Brücke sorgt dafür, das die 24V immer nur kurz anliegen. Bei einer Motornennspannung von 2.8V ist es bei stehendem Motor ziemlich egal, ob der mit 12V oder mit 24V betrieben wird.
Rudi Ratlos schrieb: > Und die "V-Ref" beim Stepperdriver regelt bloß die Strombegrenzung > (siehe Formel). Also die Kraft des Motors, nicht dessen Geschwindigkeit. > Ja... eh klar. (?) Die Geschwindigkeit beim Schrittmotor wird durch die Schrittfrequenz von außen vorgegeben. Mit Strömen und Spannungen hat das nichts zu tun, solange der Lastwinkel den kritischen Wert nicht überschreitet.
Harald W. schrieb: > Der vom TE verwendete Treiber TMC2209 enthält wohl bereits eine > Strombegrenzung. Ich habe es versäumt, vor meiner Antwort das > Datenblatt des ICs durchzulesen. Nach vermutlich 30 Jahren Abstinenz solltest Du Dich mal wieder mit aktuellen Schrittmotortreibern befassen. Tobias schrieb: > Ich komme mit meiner 12V Versorgung nicht über eine Drehzahl von ca. 1 > bis 1,5 1/s. Das entspricht etwa 200 bis 300 Steps pro Sekunde > heruntergerecht auf Vollschritte. Deine Beschreibung ist doch recht mager. Wird die passende Schrittfrequenz überhaupt ausgegeben? Bleibt der Motor stehen, wenn er schneller drehen sollte? Welche Geräusche gibt er von sich? Gibt er Töne von sich, die der Schrittfrequenz entsprechen? Bei 12 V komme ich mit diesen Motoren auch mit unbelasteter Achse (Resonanzen) locker auf 5 Umdrehungen/s.
m.n. schrieb: > Deine Beschreibung ist doch recht mager. Die passende Schrittfrequenz wird jeweils ausgegeben. Das habe ich nun nicht nur akustisch sondern auch mit dem Oszi bestätigt. Der Motor bleibt kurz vor den genannten 300 Vollschritten (je nach Microstepeinstellungen, dann natürlich mehr Steps) stehen, egal ob langsam oder schnell oder nicht beschleunigt. Danach brummt er und das mit immer höherer Frequenz (analog zur Beschleunigung.)
Wir können gehen. Rudi ist da. Das wird hier nun nichts mehr. Kein Gruß.
Jobst M. schrieb: > Wir können gehen. Rudi ist da. Das wird hier nun nichts mehr. Kein Wunder, das ist hier ja wie beim Entenfüttern.... Last ihn doch mal in ruhe, dann wird er sich schon andere Weidegründe suchen.
Also all meine Versuche scheitern. Montag habe ich wennn alles klappt ein 24V Netzteil und kann dann Vergleiche zu meinen Motoren am 3D Drucker ziehen. Auch schaffe ich mir mal einen gleichwertigen Stepper an, um den an 12V zu testen.
Wolfgang schrieb: > Die Geschwindigkeit beim Schrittmotor wird durch die Schrittfrequenz von > außen vorgegeben. Mit Strömen und Spannungen hat das nichts zu tun, Welche 'Schritt-frequenz' ? die beträgt 1 Schritt. Die (Dreh-) Geschwindigkeit von einem Schritt zum Nächsten wird von der Spannung vorgegeben. Die zulässige Höchstspannung wird vom Stepper-Driver und natürlich vom Board, in dem er steckt, vorgegeben. Für Duet-3D gibts so ein altes Infoforum, da rechnet einer für einen FLSUN für die -benötigte- Geschwindigkeit eine Spannung von mind. 32V vor. Darum hat er dann von 12 auf 24V "aufgerüstet". Weil sonst hätte er auf eine CNC-Fräs -Steuerung umsteigen müssen. Das Problem ist auch nicht die 'Endgeschwindigkeit' , sondern Beschleunigung und Verzögerung. Je höher diese, desto stärker muß der Motor werden. Also 'Highspeed': Nema23 aufwärts
Rudi Ratlos schrieb: > Die (Dreh-) Geschwindigkeit von einem Schritt zum Nächsten wird von der > Spannung vorgegeben. Jobst hat Recht +1
Rudi, ich bitte dich ganz höflich und freundlich um einen Gefallen: Geh raus aus diesem Thread. Danke, ist wirklich nicht böse gemeint.
Tobias schrieb: > Rudi, ich bitte dich ganz höflich und freundlich um einen Gefallen: Geh > raus aus diesem Thread. > Danke, ist wirklich nicht böse gemeint. Du hast ein gröberes Problem mit dem weder du -noch die anderen- fertig werden. Dein Motor dreht nur 1,5 Umdrehungen, dann steht er. Wenn dich Technik NICHT interessiert, wozu stellst dann eine solche Frage ? Woran das liegen mag, daß dein Motor alsbald stehen bleibt und brummelt . Am Motor kanns jedenfalls NICHT liegen - und am bestellten ERSATZMOTOR wohl auch nie . Ich schreibe hier, weil es mich vorzüglich amüsiert.. Tip: "Fehlersuche" dauert - wer keine Geduld hat, sollte sich ein Neugerät anschaffen. Und nicht den Leuten hier auf den Geist gehen !
Jetzt tut er wieder so als wüsste er um die Ursache, dabei kann er nur die Problemstellung wiedergegeben. ;)
Ich nutze übrigens keine 3D Drucker FW und auch nur eben den FYSETC TMC 2209 mit einem ESP8266 - sonst keine 3D Drucker HW.
Tobias schrieb: > Ich nutze übrigens keine 3D Drucker FW und auch nur eben den FYSETC TMC > 2209 mit einem ESP8266 - sonst keine 3D Drucker HW. Ja, das was der Motor tun soll (mit Hilfe des Treibers) sagt ihm der ESP8266. Wenn also die Software auf dem ESP mit dem Treiber nicht umgehen kann oder der Treiber hardwareseitig in Bezug auf Microschritte, Strom oder Schnittstelle fehlkonfiguriert ist, dann ist es so wie Du beobachtest. Software und Hardware bilden eine Einheit. Vielleicht nimmst Du zuerst den ESP8266 aus dem Fokus, indem Du ersatzweise einen Arduino(-Klon) mit GRBL o.ä. verwendest - oder den Treiber ersatzweise an eine vorhandene Installation klemmst…. Egal wie - aber es muss strukturiert und nacheinander untersucht werden.
Rudi Ratlos schrieb: > Wolfgang schrieb: >> Die Geschwindigkeit beim Schrittmotor wird durch die Schrittfrequenz von >> außen vorgegeben. Mit Strömen und Spannungen hat das nichts zu tun, > > > Welche 'Schritt-frequenz' ? die beträgt 1 Schritt. > Die (Dreh-) Geschwindigkeit von einem Schritt zum Nächsten wird von … Mit der Aussage hast Du es als „Spruch des Monats“ auf unsere Standort-Pinwand geschafft.
Hi, ich schau mir deinen Treiber jetzt nicht an, aber sicher das das so soll? >Treiber <=> Motor >A2 <=> A+ >A1 <=> A- >B1 <=> B+ >B2 <=> B- sollte das nicht eher Treiber <=> Motor A1 <=> A+ A2 <=> A- B1 <=> B+ B2 <=> B- sein? viel Erfolg, Uwe
Uwe schrieb: > sollte das nicht eher So wäre es von der Nomenklaturzuordnung her korrekt, mit meiner Verschaltung dreht er Motor eben anders herum. Ich habe zwischenzeitlich alle Anschlussvarianten durchprobiert ;) Wie Rudi schrieb, mein Problem ist gröber (sic!) als dass einer von uns nicht-Rudis das lösen könnte.
Tobias schrieb: > Jetzt tut er wieder so als wüsste er um die Ursache, dabei kann er nur > die Problemstellung wiedergegeben. ;) Freilich nur, ich versuche auf den 'Kern der Sache' zu kommen. Das ist alles was ich (immer) tue. > Wie Rudi schrieb, mein Problem ist gröber (sic!) als dass einer von uns > nicht-Rudis das lösen könnte. > Ich habe zwischenzeitlich alle Anschlussvarianten durchprobiert ;) Also liegts nicht an einem falschen Anschluss. Da du aber, darum gehts (mir:) bei der Ursachenforschung, den Motor nur mit einem TMC2009 plus ESP8266 (und sonst keinerlei Druckerhardware) benutzt, kann der Fehler nur mehr an -diesen beiden- Bauteilen liegen. Wie gesagt: aufpassen bei TMC-Platinen. Ich weiß das nur von Bigtreetech, deren TMC sind NICHT mit allen Boards kompatibel. Also weder mit Allen EIGENEN und daher auch nur mit wenigen FREMDBOARDS. Die nächste Frage ist daher, wo hast du den TMC2209 (von: XYZ) reingesteckt ? (Kompatibilitätsproblem) Ein Board muss mit diesem speziellen Treiber in dieser speziellen TMC-Konfiguration umgehen können. Darum habe ich dir w.o. die zwei Datenblätter verlinkt.
Ich persönlich verstehe auch nicht, wie du ein "WiFi-Modul" mit einem Stepperdriver verbinden: kannst. Ist mir auch zu umfangreich diese µC-Bauteil-Seite. 'WiFi' an Druckerboard verstehe ich noch.
Rudi Ratlos schrieb: > Ich persönlich verstehe auch nicht, > wie du ein "WiFi-Modul" mit einem Stepperdriver verbinden: kannst. > Ist mir auch zu umfangreich diese µC-Bauteil-Seite. > > 'WiFi' an Druckerboard verstehe ich noch. Weil er vielleicht ein Fenster im Schuppen zum Belüften öffnen will und der Stepper bewegt den Fensterflügel? Es gibt mehr als nur Drucker & CNC.. Nachtrag: …weil ja sicher gleich ein Einwand kommt, dass man dazu doch kein WLAN braucht: Der Schuppen steht 10m neben dem Carport, da ist der Windsensor drauf. Und bei Sturm bleibt das Fenster zu… ist doch schlüssig und als Anforderung beim Gewächshaus z.B. sogar wünschenswert. Nachtrag 2: Das sich einige Zeitgenossen nicht zu blöde vorkommen, kaum abgeschickt und schon negativ bewertet. Vielleicht mal die Vorurteile überdenken oder einen konstruktiven Beitrag bringen.
bei 1/16 Mikroschritten sollte so ein einfacher NEMA17 ohne Last locker mit 20 kHz laufen, auch bei nicht maximaler Motorspannung. Wichtig ist definitiv die richtige Beschleunigung. Mit Libs wie grbl oder AccelStepper bekommt man das leicht hin. Oder auf ESP32 wechseln, da gibt es mit FluidNC eine feine fertige Lösung mit WebGUI. Das wird über eine Konfigdatei parametriert, für den TMC2209 gibt es da Vorlagen. https://github.com/bdring/FluidNC/tree/main/example_configs Noch mehr Speed geht mit Closed Loop Systemen, einen NEMA24 hatte ich da zum Test mit 160 kHz und 1600 Schritten/Umdrehung laufen, da pfeifft der Motor ganz ordentlich.
Olaf schrieb: > Kuckst du hier: > > http://www.goetz-automation.de/Schrittmotor/Resonanzen.htm > > Olaf Neben Jitterfreier schrittfrequenzerzeugung wurde mit dem 3. Beitrag alles gesagt. Klingt der Motor kratzig? -> schrittfrequenzerzeugung optimieren! Steigt er bei 300hz aus -> Motorstrom verringern, dämpfer wie z.b. riementrieb auf der welle anbringen zu den Ratlosen beiträgen die WIFI hinterfragen fasse ich mir nur an n kopp.
Hallo, ich selbst habe die besten Ergebnisse mit 1/8 Schritt gemacht. Deine Motorspulen werden mit zunehmender Frequenz hochohmiger und somit die Leistungsaufnahme kleiner. Das kannst Du eigentlich nur mit einer höheren Versorgungsspannung ausgleichen. Die Rampenlänge ist bei meinen Motoren auch nicht sehr groß. Mit Resonanzen habe ich eigentlich nur im Halb- und Vollschritt Probleme. Viel Erfolg. Gruß Carsten
Flip B. schrieb: > zu den Ratlosen beiträgen die WIFI hinterfragen fasse ich mir nur an n > kopp. Ich hinterfrage ja nicht WiFi , sondern wieso er an ein WiFi-Modul einen Stepperdriver anschließt - oder wie ? und dann erwartet, daß der Stepperdriver funktioniert. Gut, wie auf µC zu lesen, das hätte UART. Also stellt sich die Frage, ob dieses tatsächlich eingeschaltet wie konfiguriert ist. Da brauchst dich nicht zu wundern . In einer ama-Rezi hat einer geschrieben, der hat Bigtreetech-TMC2009 v1.3 bestellt und v1.2 bekommen. Die funktionierte aber nicht auf 'diesem' Bigtreetech-Board. Dann hat er wochenlang herumreklamiert - und am Ende hat ihm der Händler doch eine v1.3 geschickt. Und hat auf Anhieb funktioniert. So fucking what ? Das ist halt so.
Also, mit 24V dreht er wie erwartet. Damit hat sich das Thema für mich erledigt. Danke für alle Hinweise und Meinungen, und sorry, dass ich das an der Stelle nicht so wissenschaftlich angehe wie erwartet. Ich möchte einfach nicht jedes kleine Projekte extrem aufblasen. Den Anspruch habe ich, die Zeit nicht.
Tobias schrieb: > Also, mit 24V dreht er wie erwartet. Schön für Dich. Es ist aber zweifelhaft, ob Dein oben verlinkter Motor auch bei Dir auf dem Tisch liegt. Aus Erfahrung haben ja mehrere Leut:innen hier eine höhere Drehzahl schon bei 12 V erwartet. Viel Erfolg beim Rest!
Tobias schrieb: > Bin ich hier mit der Spannung am Limit und muss auf 24V gehen? Das kommt auf die Induktivität der Wicklungen an. Hast du sowas wie ein Datenblatt zum Motor? Zumeist steht da irgendeine Spannungsangabe drin, die zwar für den praktischen Gebrauch herzlich schnurz ist, aber Rückschlüsse auf die Motorimpedanzen zuläßt. Also: je höher die Impedanz, desto flacher der Stromanstieg in der Wicklung und folglich desto mehr Zeit braucht die Wicklung, um den Motor einen Schritt weiter zu ziehen. Aber je schneller du ihn drehen lassen willst, desto weniger Zeit hat er für einen Schritt. Also muß die angelegte Spannung erhöht werden, damit der Strom schneller ansteigt. Dito für steigende Last. Denn das was den Motor etwas ziehen lassen kann, ist das Magnetfeld und wenn der Stromfluß in der Wicklung nicht schnell genug hoch kommt, dann fehlt es schlichtweg an Kraft also an Drehmoment an der Welle. W.S.
Vielleicht war auch einfach das 12 V Netzteil nicht geeignet. Ist am TMC Modul ein Elko? Da sollten min. 100 µF nahe am Modul sein.
W.S. schrieb: > Hast du sowas wie ein Datenblatt zum Motor? Ist oben im Thread verlinkt. Danke für die Erklärung! J. S. schrieb: > Vielleicht Das kann sein, ich habe 100uF, der Elko selbst ist auf den Fotos erkennbar. Direkt am Vm Pin.
Ich hatte mal einen 3D Drucker mit ESP als Controller gebaut. Der begrenzende Faktor war der ESP. Tensilica Architektur ist Schrott.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.