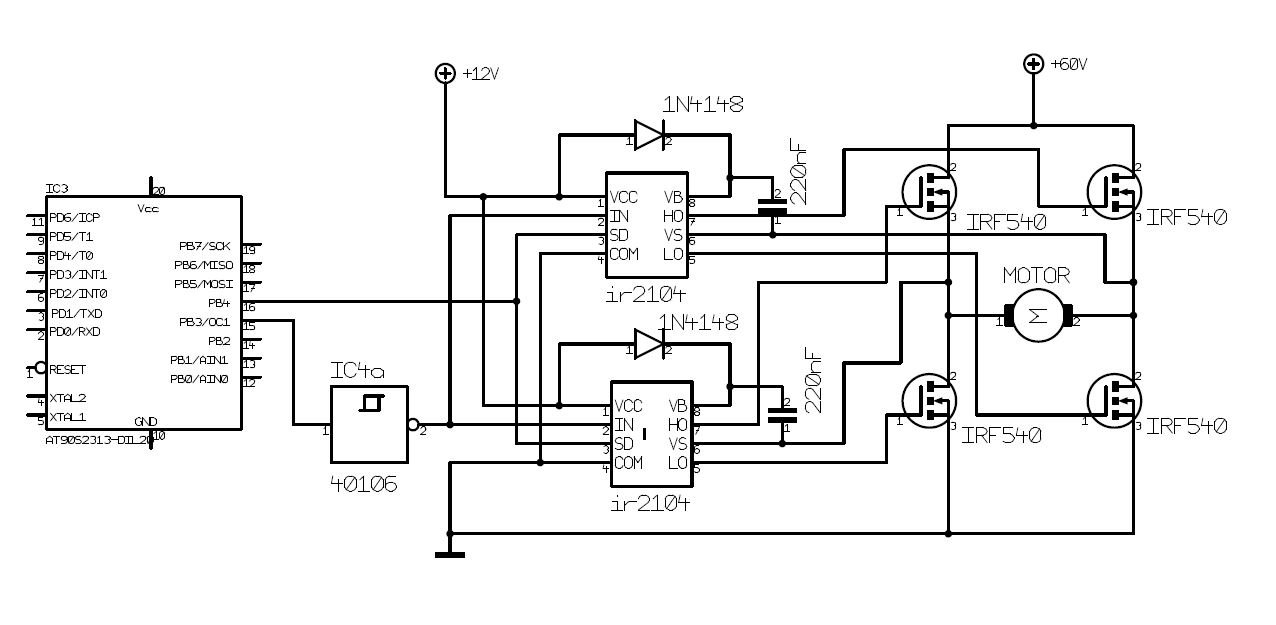
Hallo zusammen, ich bastle gerade an einer H-Bridge für einen 12V DC Motor. Hierzu habe ich diese Schaltung hier gefunden. Irgendwie funktioniert die aber nicht. Habe mehrmals die Verdrahtung geprüft und keinen Fehler gefunden. Ich verwende anstelle der 60V 12V. Denke das sollte nicht das Problem sein. SD der IR2104 setze ich auf HIGH (3.3V). Am 40106 lege ich eine PWM 3.3V an. Tests mit 0 - 100 % Duty Cycle. Kann am Motor an beiden Polen ein Rechtecksignal sehen. Aber der Motor dreht nicht. Kennt jemand diese Schaltung und kann mir sagen ob die so funktioniert? Danke und Grüße
Angehängte Dateien:
-

H-Bridge.jpg
87 KB
Den IR2104 und die Schaltung damit kenne ich nicht. Aber schau mal hier: https://de.wikipedia.org/wiki/Vierquadrantensteller und hier: https://de.wikipedia.org/wiki/Datei:Vierquadrantensteller-Rechtslauf-Beschleunigen.gif In dem Gif wird die Funktion deutlich. Mein Tipp: steuer die Brücke erst mal ohne PWM an mit einem Widerstand statt dem Motor und mess dabei aus, ob die Funktion gegeben ist. Wenn nicht, poste hier das Fehlerbild. Falls das Gif nicht richtig dargestellt wird, schau in das Video hier: https://www.youtube.com/watch?v=NyaOAJOG-zw
Werner P. schrieb: > Kann am Motor an beiden Polen ein Rechtecksignal sehen. Aber der Motor > dreht nicht. Ist doch logisch, wenn du an beide Halbbrückentreiber das selbe Signal legst … Die Brücke schaltet abwechselnd Ucc und GND an beide Pole des Motors, also Spannung über dem Motor gleich null. Lege mal einen der Eingänge (Pin 2) auf Masse, dann sollte der Motor auch drehen.
Angehängte Dateien:
-

H-Bridge.png
140 KB
{kind=link}
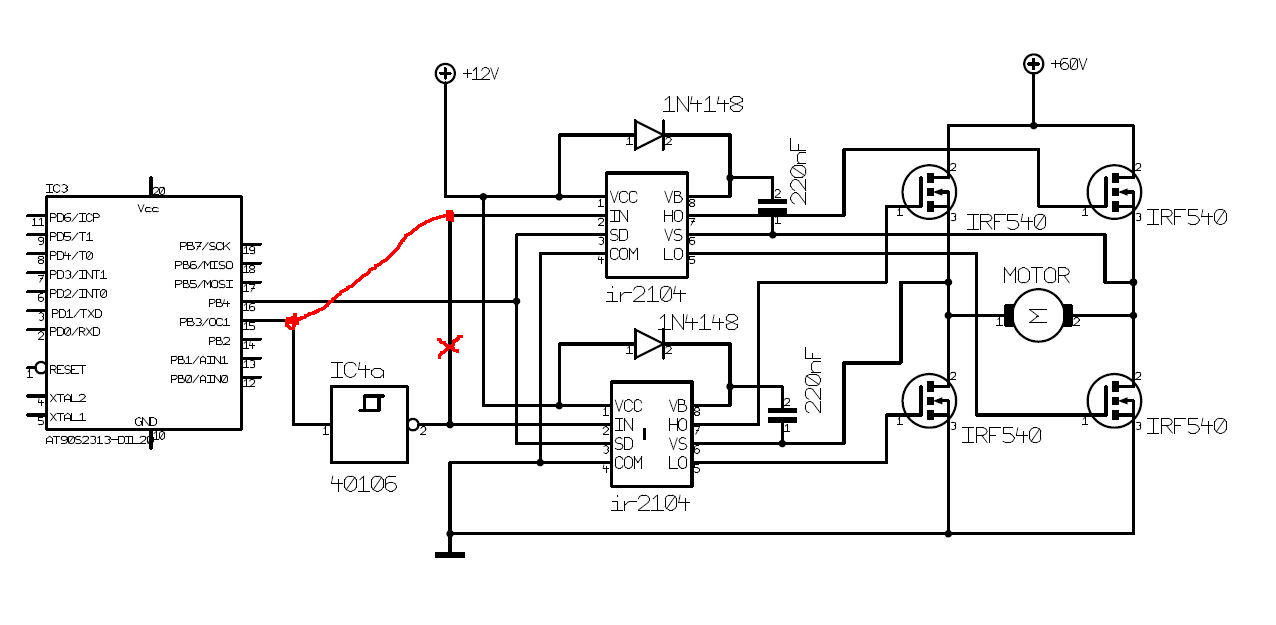
Werner P. schrieb: > ich bastle gerade an einer H-Bridge für einen 12V DC Motor. Hierzu habe > ich diese Schaltung hier gefunden. Hmm. > Ich verwende anstelle der 60V 12V. Denke das sollte nicht das Problem > sein. Nein. > SD der IR2104 setze ich auf HIGH (3.3V). OK. > Am 40106 lege ich eine PWM 3.3V > an. Naja, ist etwas knapp, sollte aber noch reichen. > Tests mit 0 - 100 % Duty Cycle. 100% gehen nicht, wegen der Bootstrapschaltung. Welche PWM-Frequenz? > Kann am Motor an beiden Polen ein Rechtecksignal sehen. Aber der Motor > dreht nicht. Logisch, weil beide Halbbrücken phasengleich arbeiten. Da ist ein Fehler im Schaltplan. Das IN für einen der Treiber muss direkt vom AVR kommen, der andere aus dem Inverter.
Erst mal Danke an Alle. Falk B. schrieb: >> Kann am Motor an beiden Polen ein Rechtecksignal sehen. Aber der Motor >> dreht nicht. > > Logisch, weil beide Halbbrücken phasengleich arbeiten. Da ist ein Fehler > im Schaltplan. > > Das IN für einen der Treiber muss direkt vom AVR kommen, der andere aus > dem Inverter. Mittlerweile auch meine Vermutung. Ich weiß zwar so in etwa wie eine H-Brücke funktioniert. Diese Schaltung verstehe ich leider nicht so ganz. Wie funktioniert da Links- und Rechtslauf? 50% Duty Cycle = Stillstand > 50% links , < 50% rechts und je nach PWM Speed. Ist meine Vermutung richtig? Danke und Grüße
Falk B. schrieb: > Das IN für einen der Treiber muss direkt vom AVR kommen, der andere aus > dem Inverter. Dann hätten wir zwei gleiche Rechtecke mit 180° Phasenverschiebung am Motor – drehen wird der sich dann auch nicht, höchstens pfeifen …
Werner P. schrieb: > Wie funktioniert da Links- und Rechtslauf? > > 50% Duty Cycle = Stillstand >> 50% links , < 50% rechts und je nach PWM Speed. > > Ist meine Vermutung richtig? Nein. Lege (wie ich oben schon schrieb) einen der beiden Eingänge ("IN") auf Masse, an den anderen die PWM (direkt vom µC, den Schmitt-Trigger-Inverter kannst du auch weglassen). Motor dreht in Richtung A, Geschwidigkeit je nach PWM. Lege den anderen "IN" auf Masse, an den nun anderen "IN" die PWM – Motor dreht in Richtung B, Geschwindigkeit je nach PWM.
Johannes F. schrieb: > Werner P. schrieb: >> Wie funktioniert da Links- und Rechtslauf? >> >> 50% Duty Cycle = Stillstand >>> 50% links , < 50% rechts und je nach PWM Speed. >> >> Ist meine Vermutung richtig? > > Nein. > Lege (wie ich oben schon schrieb) einen der beiden Eingänge ("IN") auf > Masse, an den anderen die PWM (direkt vom µC, den > Schmitt-Trigger-Inverter kannst du auch weglassen). Motor dreht in > Richtung A, Geschwidigkeit je nach PWM. > Lege den anderen "IN" auf Masse, an den nun anderen "IN" die PWM – Motor > dreht in Richtung B, Geschwindigkeit je nach PWM. ok. Mach ich. Danke erstmal
Werner P. schrieb: > ok. Mach ich. > > Danke erstmal Der IR2104 hat 500ns Totzeit, der 40106 schaltet in 200ns, also kann die PWM-Frequenz recht hoch werden, aber mach sie nicht ZU hoch ... LG, Sebastian
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.