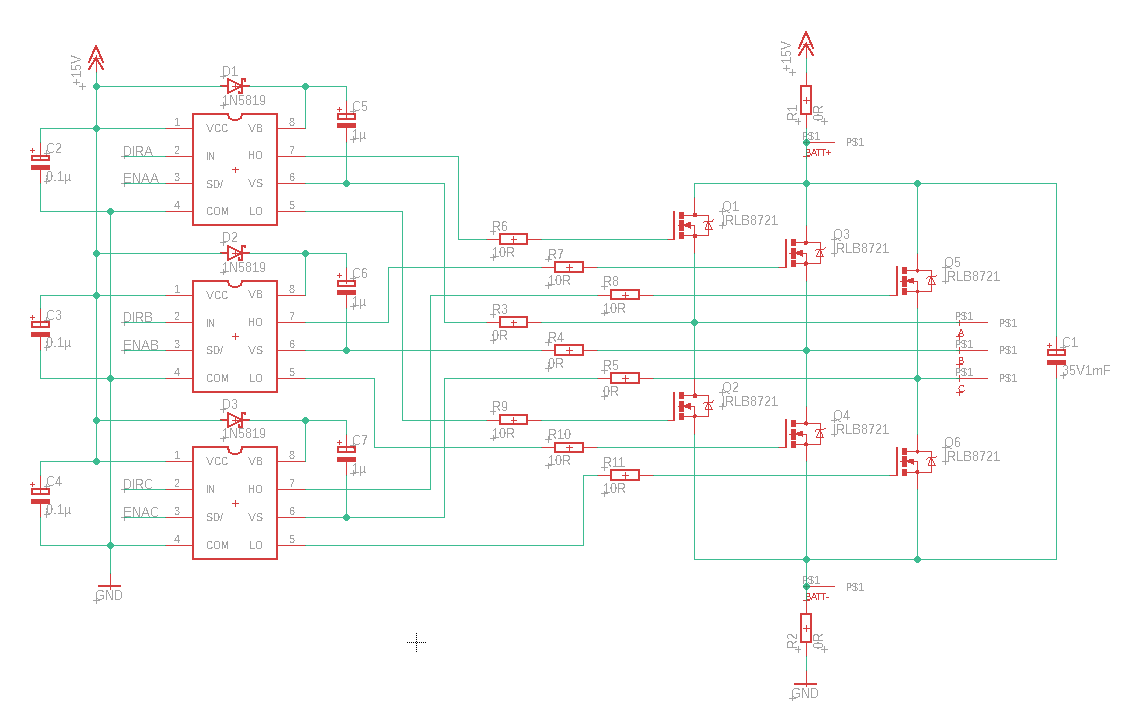
Ich habe als Hobbyprojekt einen BLDC-Controller gebaut, um einen Fahrradanhänger elektrisch zu unterstützen. Im Gegensatz zum eBike habe ich keinen Freilauf, sodass ich bergab prinzipiell auch rekuperieren kann. Ich mache das, indem ich den Motor über die Low-Side-Transistoren kurzzeitig kurzschließe und die induzierte Spannung dadurch erhöhe. Nach dem Öffnen fließt der Strom über die Freilaufdioden zurück. Ich regle den Strom über das PWM-Tastverhältnis und rampe ihn raus, wenn die Spannung Richtung Ladeschlußspannung geht. Soweit funktioniert das erstmal ganz gut. Jetzt habe ich gemerkt, dass der Wirkungsgrad sehr gering ist. Der Anhänger bremst deutlich stärker als er mit gleichem positivem Strom unterstützt. Das leuchtet auch ein, da über die Freilaufdioden ja immer eine Spannung abfällt und damit dort Leistung verbraten wird. Prinzipiell nicht so schlimm, da ich ja sowieso bremsen würde. Das Problem ist nur, dass die Low-Side-Transistoren (mit integrierten Dioden) trotz großem Kühlkörper sehr heiß werden. Ich nehme an, dass ich den Effekt vermeiden könnte, wenn ich statt die Freilaufdioden zu benutzen, die richtigen Transistoren zum richtigen Zeitpunkt schließen würde. Über diese Idee möchte ich an dieser Stelle aber nicht diskutieren(*). Ich habe drei andere Ideen und gern Eure Meinung dazu gewusst. 1. Statt den Motor über die Low-Side-Schalter kurzzuschließen, müsste man doch prinzipiell auch die High-Side-Schalter benutzen können. Müsste den gleichen Effekt haben. Ist das so oder habe ich was übersehen? Dann könnte ich regelmäßig umschalten und die Last verteilen. Hintergrund zur Schaltung: 6 gleiche N-Kanal-FET mit integrierten Dioden, 3 Halbbrücken-Treiber IR2104, 1 PWM-Quelle, die ich mit UND-Gattern auf die Halbbrücken-Eingänge verteile. Es ist also auch möglich, die High-Side-Schalter synchron mit dem PWM zu schließen. 2. Hat die PWM-Frequenz einen Einfluß auf diesen Effekt? Für mich haben sich 32kHz als günstig für den Motor-Betrieb ergeben, deshalb benutze ich sie auch für den Reku-Betrieb. Ich könnte auch auf 8kHz umschalten. 3. Eigentlich wollte ich erstmal SW-Lösungen finden, falls ich aber die Hardware nochmal überarbeite: Wäre es sinnvoll extra Freilaufdioden mit möglichst geringem Spannungabfall zu benutzen? *Den Wechsel zwischen Kurzschluss und alle Tr. offen kann die Schaltung in Hardware via PWM durchführen, der Wechsel zwischen Kurzschluss und die richtigen Tr. geschlossen wäre ein erheblicher Aufwand für die SW.
Angehängte Dateien:
-

bldc.png
9,9 KB
Rekuperiert wird einzig und allein über eine kleine Verringerung des Tastverhältnisses. Bei selbstverständlich weiterhin komplett aktiver Brücke. Wenn du z.B. gerade mit 50% der Maximalgeschwindigkeit fährst, dazu z.B. 55% am Motor brauchst, verringerst du zum Bremsen einfach den Tastgrad auf 45%. Mehr ist das nicht. All der ganze andere Quatsch mit Choppen, zusätzlichen DC/DC-Wandlern usw. ist nur weit verbreiteter Quatsch von Leuten, die EC-Motoren nie verstanden haben. Findet man hier leider massenhaft, deshalb ist es deine Hauptaufgabe, absehbare "Expertisen" solcher Art zu ignorieren. Natürlich kannst und solltest du besser über den Bremsstrom regeln. Die Änderung beim Tastgrad ist aber schlussendlich dieselbe. Bei idealem Motor, Regler und Akku würde übrigens <1% Verringerung reichen. Viel Erfolg!
Uwe S. schrieb: > verringerst du zum Bremsen einfach den Tastgrad ... Da fehlt allerdings noch ein kleiner Phaseversatz bei der Steuerung. Beim motorischen Betrieb eilt der Staor dem Drehfeld beim Rotor um rund 15° voraus und beim generatorischen Betrieb hängt dieser um rund 15° nach.
Vielen Dank für die Antworten. Ich werd' mal sehen, was ich daraus mache. Ich habe einen Motor mit Hall-Sensoren, deshalb brauche ich für den Motor-Betrieb bisher keinen Timer, kommutiere direkt zum Interrupt. Für den Phasenversatz müsste ich mir einen Timer stellen. Muss ich mir in einer ruhigen Minute mal zu Gemüte führen. :-)
Sven G. schrieb: > Ich habe drei andere Ideen und gern Eure Meinung dazu gewusst. > 1. Statt den Motor über die Low-Side-Schalter kurzzuschließen, Wenn zu lange nur der Low-Side oder High-Side-Schalter betätigt wird, kann es passieren, dass die Bootstrapping erzeugte Hilfsspannung zu niedrig werden könnte. > 2. Hat die PWM-Frequenz einen Einfluß auf diesen Effekt? Bei niedrigeren Drehzahlen ist die Induktionsspannung geringer und da müßte für dieses Prinzip die Frequenz erniedrigt werden oder/und zugleich das Tastverhältnis geändert werden. > 3. ... Wäre es sinnvoll extra Freilaufdioden mit möglichst geringem Spannungabfall zu benutzen? Wenn bei normalen Betrieb ohne ReKu zu wenig Reserven (Erwärmung) vorhanden wären, dann wäre so eine Ergänzung ratsam zu versuchen, weil es den wenigsten Änderungaufwand verursacht. Übrigens, falls Du alle drei Low-Side-Schalter durchgeschaltet haben solltest, dann war einer davon immer im Kurzschlussbremsmodus. Je nach Postion des Drehfeldes, darf einer oder zwei gleichzeitig als Aufwärtswandler arbeiten. Das dürfte die Erwärmung verursacht haben. Es gibt aber auch Fälle, da ist das sogar beabsichtigt um Schwingungen mit der Regelung zu vermeiden.
Sven G. schrieb: > Ich habe einen Motor mit > Hall-Sensoren, deshalb brauche ich für den Motor-Betrieb bisher keinen > Timer, kommutiere direkt zum Interrupt. Das reicht völlig, locker 3/4 aller Motoren arbeiten so. Das ganze Thema Kummutierungselektronik und -Winkel kann man erstmal ignorieren, sich stattdessen einen DC-Motor vorstellen. Diesen kann man fast immer in beide Richtungen ähnlich effizient drehen lassen, es gibt nur wenige Ausnahmen mit Vorzugsrichtung. Beim EC-Motor ist halt lediglich der Kommutator durch Hallgeber ersetzt. Viel wesentlicher ist, daß man erkennt, daß ein laufender Motor quasi eine 2Q-Spannungsquelle/-senke ist, deren Spannung analog zur Drehzahl ist. Zwischen dieser Quelle/Senke und dem Akku liegt die Brücke und die Motorinduktivität. Den Rest kann man analog zu Schaltreglern mit Speicherdrossel und Mosfet-Halbbrücke verstehen. 50% Tastverhältnis gleich halbe lowside-Spannung. Oder eben je nach Betrachtung auch 50% Tastverhältnis gleich doppelte highside-Spannung. Tachospannung und Akkuspannung sind über das Tastverhältnis praktisch mathematisch gekoppelt. Man könnte z.B. einen Motor mit 50% ansteuern, so einen Berg mit 45% Nenndrehzahl hochfahren, während z.B. 20A aus dem Akku gezogen würden. Fährt man nun denselben Berg wieder runter, fährt man mit 55% Nenndrehzahl, lädt 20A in den Akku. Alles geschähe bei unveränderten 50% Tastgrad. Die +-5% Drehzahländerung muss man allein den nicht idealen Komponenten zuschreiben. Um auf ebener Strecke zu bremsen, muss man natürlich den Tastgrad immer weiter senken, und stets etwas unterhalb des rechnerischen Leerlauf-Tastgrads bleiben.
Oh, unser selbstermannter EC-Motor-Experte hat selber leichte Verständnisschwierigkeiten Uwe S. schrieb: > Wenn du z.B. gerade mit 50% der Maximalgeschwindigkeit fährst, > dazu z.B. 55% am Motor brauchst, Nein. 50% Tastverhältnis an den aktiven Halbbrücken stellen eine (mittlere) Motorspannung von 0 dar. Also sind Deine 55% tatsächlich 10% der maximalen Motorspannung. Die von Dir gennanten 50% Motorspannung liegen bei einem Tastverhältnis von 50%+25% = 75% am Motor an. Denk' nochmals in Ruhe darüber nach :-) Grüßle, Volker
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.