Hallo zusammen,
ich bin auf der Suche nach einer Ersatzschaltung für einen IEPE
Beschleunigungssensor die es mir ermöglicht das Signal eines IEPE
Beschleunigungssensors (siehe 2) ) mittels Frequenzgenerator zu
simulieren und es in den Signalpfad einzukoppeln um
Frequenzgangsmessungen durchzuführen.
1 | 1) 2) 3) 4) 5)
| 2 | |Signal- | |Ersatz | |Konstantstrom| |µC mit Übertragungs | | |
| 3 | |Generator| -> |schaltung für| -> |mit Singal- | -> |funktionen und | -> |Oszi|
| 4 | |(Oszi) | |IEPE Sensor | |auskopplung | |Leistungsverstärkung| | |
|
1) und 5) Oszi mit Signalgenerator und Frequenzganzsmessfunktion
2) Gesucht - Ersatzschaltung mit Mosfet oder OPV?
- Ersetzt werden soll: IEPE Sensor (100 mV/g) (KS77C100 Firma Metra
Mess- und Frequenztechnik)
- Frequenzbereich: 1-3 Hz bis 500 Hz
- Amplitude: 3-4 Volt peak; Ausgang (~ 50 g max) (der Arbeitsbereich
liegt bei 1 V peak
3) Signalkonditionierung (M33 der Firma Metra Mess- und Frequenztechnik)
- Konstantstromversorgung, gemessen ~3,4 mA bei einer Biasspannung
von 13 Volt (obiger Sensor)
- Verstärkung möglich von 1-1000
- Tiefpass, Hochpass oder Intgrationsmodule möglich
4) PCB mit µC und analoger Leistungsverstärkung
Für erste Tests habe ich eine Konstantstromversorgung nachgebaut, die
mit den Werten von 2) arbeitet.
Ich habe im Netz schon einiges an Übersichtsplänen gefunden, aber bei
Schaltbildern mit OPVs zum Beispiel fehlt immer die Anbindung der
Versorugungsspannung.
Kann hier jemand helfen mit Links oder einem Schaltplan?
Gruß und Dank im voraus.
kalle
Kalle K. schrieb:
> ich bin auf der Suche nach einer Ersatzschaltung für einen IEPE
> Beschleunigungssensor die es mir ermöglicht das Signal eines IEPE
> Beschleunigungssensors (siehe 2) ) mittels Frequenzgenerator zu
> simulieren und es in den Signalpfad einzukoppeln um
> Frequenzgangsmessungen durchzuführen.
Du kannst davon ausgehen das der Beschleunigungssensor ziemlich linear
in Bezug zur Beschleunigung ist. Zumindest innerhalb seiner angegebenen
Bandbreite.
Man sollte nur ggf. einen Überspannungsschutz für den ersten OPV
vorsehen. Bei manchen Sensoren können auch ziemlich hohe Spannungen
auftreten.
Habe noch etwas gefunden.
Beitrag "Re: Ladungsverstärker Piezo"
mfg Klaus
IEPE Simulatoren sind zwei Schaltungen in der DKD 3-2
Kalibrierung von Signalkonditionierern.
Download Bein DKD.
Link später
Hier der Link
https://www.ptb.de/cms/fileadmin/internet/dienstleistungen/dkd/archiv/Publikationen/Richtlinien/DKD-R_3-2_2019.pdf
Piezo-Beschleunigungssensoren sind sehr linear.
Gute gerne über mehr als 6 Dekaden.
Das klappt jedoch nicht bei IEPE Sensoren wg. dem begrenztem
Dynamikumfangs des eingebauten Verstärkers.
Sie haben jedoch keinen konstanten Übertragungsfaktor über den
Frequenzbereich (wenn man genau genug messen kann ;) ). Das einfache
Modell ist ein Einmassenschwinger mit Resonanz, bessere Modelle
beinhalten noch eine zusätzliche Koppelmasse ....
(Zweimassenschwinger).
Wenn man von der ersten Resonanzstelle (steht üblicherweise im
Datenblatt) weit genug weg bleibt, überwiegen jedoch die Einflüsse der
Montage und man darf den Übertragungsfaktor als konstant ansehen. Will
und kann man besser als (ich sag mal so grob) 2% rel Unsicherheit
werden, kommt man je nach Sensor (Piezomaterial) und Frequenzbereich
nicht um eine Frequenzkompensation herum.
Hab Deinen Artikel noch mal im Detail gelesen. Wenn Du bis ein paar Hz
runter willst, schlägt bei normalen IEPE Sensoren der interne Hochpass
zu, da macht eine Kompensation des Frequenzgangs absolut Sinn. ...
Wenn man denn unbedingt den vorhanden Sensor verwenden will/muss. Je
nach geforderten Unsicherheiten und Dynamikumfang würde ich einen
MEMS-Sensor in Erwägung ziehen.
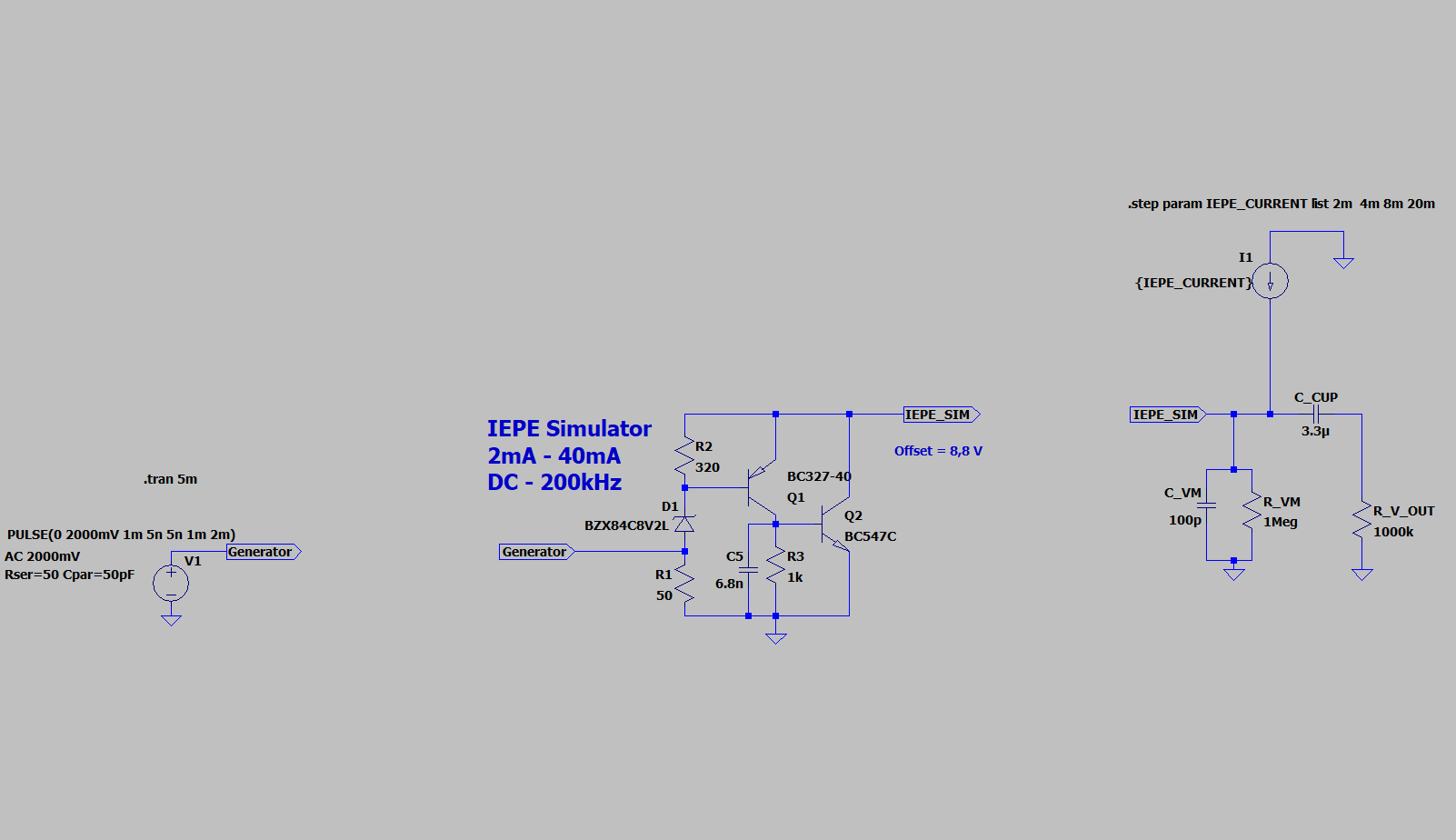
Hier mal eine IEPE Simulatorschaltung die ich verwendet habe.
Ziel war bis auf DC runterzukommen und einen BIAS unter 9V zu haben um
die Transferfunktion des Simulators im 10V Messbereich checken zu
können. (bei <=1V Amplitude)
Ja ja ein Transistor reicht eigentlich ... ...
Tag auch und danke für die bisherigen Anworten.
Ich versuche mal auf ein paar Aspekte näher einzugehen, sofern ich das
angesprochene richtig verstanden habe...
Klaus R. schrieb:
> Du kannst davon ausgehen das der Beschleunigungssensor ziemlich linear
> in Bezug zur Beschleunigung ist. Zumindest innerhalb seiner angegebenen
> Bandbreite.
Henrik V. schrieb:
> Wenn Du bis ein paar Hz
> runter willst, schlägt bei normalen IEPE Sensoren der interne Hochpass
> zu, da macht eine Kompensation des Frequenzgangs absolut Sinn.
Der Frequenzbereich, in dem die Regelung arbeiten soll und die zu
dämpfenden mechanischen Zielfrequenzen, liegen im Bereich von ca. 5-120
Hz.
(Die untere Grenze ändert sich recht stark, je nach momentaner
mechanischer Aufstellung).
Mechanische Frequenzen von 120 Hz bis 500 Hz interessieren mich zwar aus
wissenschaftlicher Sicht, für die Regelung sind sie eher hinderlich
(Stichwort: Nichtkollokierte Regelung) - ich werde sie wohl ausfiltern
müssen.
Der lineare Bereich des Sensor sollte eigentlich ausreichen, so unsere
Einschätzung. Probleme bereitet eher das verrauschte Signal.
Hier ein Auszug aus einer Messung für den verwendeten Sensors, die wir
in Auftrag gegeben haben: 1 | Frequenz [Hz] |Übertragungskoeffizient [mV/g] | Phase [°]
| 2 | 5 |100,75 | 0,6
| 3 | 10 |100,44 | 0,0
| 4 | 100 |98,95 |-0,9
| 5 | 500 |97,86 |-2,2
|
Gerade die Phase bzw. das nicht verlieren der Phase ist für uns wichtig.
Link zum Datenblatt des Sensors:
https://www.mmf.de/datasheet/ks77c100_de.pdf
Henrik V. schrieb:
> Je nach geforderten Unsicherheiten und Dynamikumfang würde ich einen
> MEMS-Sensor in Erwägung ziehen.
Bei den MEMS-Sensoren, die ich bis dato gesehen habe (je nach
Messbereich), fällt die Phase schon bei kleinen Frequenzen schon recht
stark ab.
Ich lasse mich aber gerne vom Gegenteil überzeugen.
Es geht also momentan vornehmlich um die Signalkonditionierung.
Wir wollen in diese einen analogen Integrator (Link zum PDF unten ->
Bild 6) einsetzen, um Integration "auszulagern". Der Amplitudengang des
Integratormoduls fällt laut Bedienungsanleitung ab ca. 5 Hz mit 20
dB/Dek ab.
Also müssen wir kompensieren.
Link zum PDF -> Bild 6 -> https://www.mmf.de/manual/m33man.pdf
Henrik V. schrieb:
> Hier der Link
>
https://www.ptb.de/cms/fileadmin/internet/dienstleistungen/dkd/archiv/Publikationen/Richtlinien/DKD-R_3-2_2019.pdf
Super, nach sowas hatte ursprünglich gesucht.
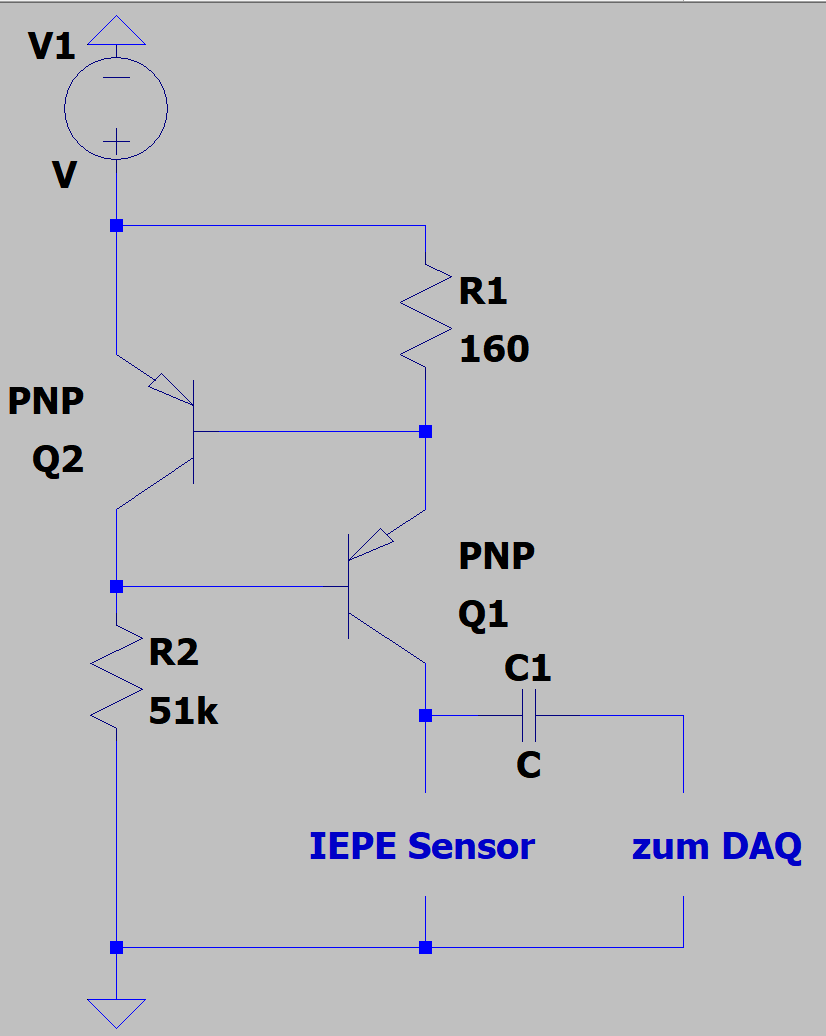
Die Schaltung "Abbildung 16: IEPE-Sensorsimulation mit Hochpass und
Impedanzanpassung" wäre noch etwas für den schnellen Nachbau.
Die Schaltung aus Deinem Bild (simIEPE.png) hab ich noch nicht ganz
durchdrungen. ;)
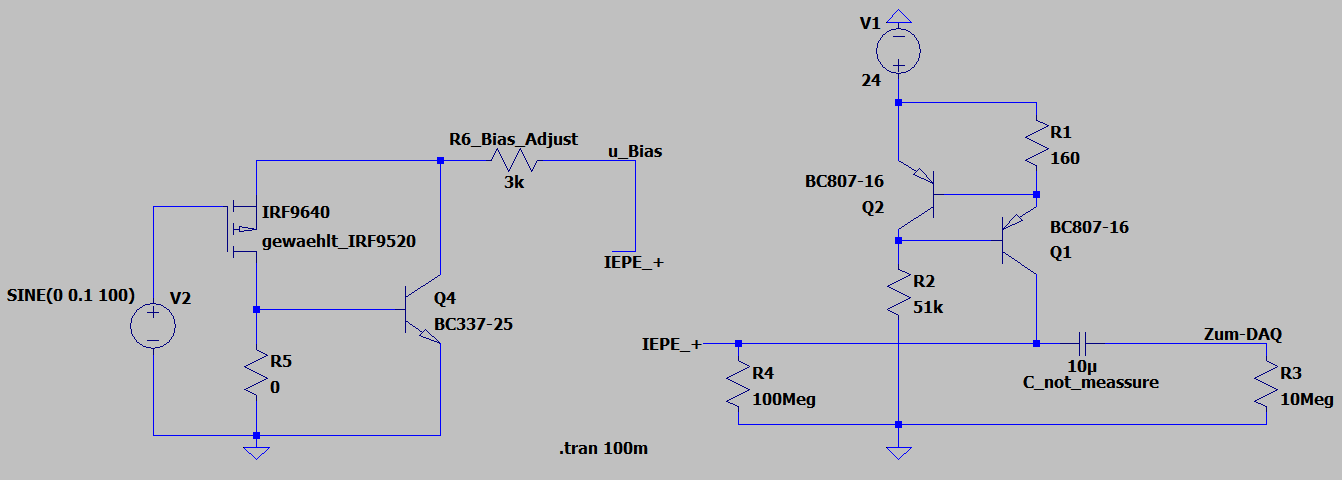
Hatte gestern noch etwas (nach)gebastelt und dabei kam die Schaltung aus
dem Anhang raus, bei der ich den "Bias Resistor" weggelassen habe, dafür
aber mit einem Poti "R6_Bias_Adjust" die Biasspannung eingestellt habe.
Ausgangsbasis für die Bastellei:
https://www.allaboutcircuits.com/technical-articles/piezoelectric-accelerometers-iepe-type-vs-charge-output-sensors/
Grüße
Editgrund: Quelle vergessen
Hallo Kalle,
C_not_meassure und R3 haben eine Zeitkonstante von 100 Sekunden. Ist das
so gewollt?
mfg Klaus
Wieso lasst ihr Messungen in nicht SI Einheiten machen?
(Sorry, der musste musste sein)
Benutzt ihr für die Kraft noch Pound oder Pont?
Welche Amplituden in v [m/s] oder a [m/s^2] erwartet ihr?
Warum kein Geschwindigkeitssensor
zB Schwingspule, Seismometer? Wo ihr Euch die Integration sparen könnt.
Was ist das Ziel der Regelung?
Die richtig guten Sensoren zur Lageregelung fallen halt schnell unter
ITAR.
Henrik V. schrieb:
> Warum kein Geschwindigkeitssensor
> zB Schwingspule, Seismometer? Wo ihr Euch die Integration sparen könnt.
Es ist mir neu, dass es Geschwindigkeitssensoren gibt. Geschwindigkeit
ist eine abgeleitete Größe. Auch eine Schwingspule ist nur ein
Beschleunigungssensor.
Gruß
Unterschied zwischen ICP und IEPE
Ist ja schon lange her, dass ich mich mit Beschleunigungssensoren
beschäftigen musste. Aber damals wars so, dass ICP einfach
Beschleunigungssensoren mit 2 Anschlüssen und Konstantstromversorgung
waren. Dann kamen die IEPE-sensoren auf und die hatten als Zusatzfeature
die Abfrage, welchen Messrange sie haben. Kann man also mit einer
elektrischen Erstzschaltung, wie hier besprochen, einen IEPE-Sensor
ersetzen/simulieren oder doch nur einen ICP-Sensor?
Gruß
Franko P. schrieb:
> Es ist mir neu, dass es Geschwindigkeitssensoren gibt. Geschwindigkeit
> ist eine abgeleitete Größe. Auch eine Schwingspule ist nur ein
> Beschleunigungssensor.
No Sir ;)
Beschleunigung und Geschwindigkeit sind abgeleitete Größen des Weges
(zweimal bzw einmal) ;)
Schwingspulensensoren (Siehe Geophone) sind Geschwindigkeitssensoren.
(Werden zB gerne in den Gondeln der Windkraftwerke eingesetzt und als
Geophone /Seismometer). Analog der nach meinem Eindruck (den bisherigen
Angaben) der für den Fragesteller bessere Sensor.
Die (DC fähigen) Servosensoren sind wieder Beschleunigungssensoren. Da
wird die Spule zur Einprägung der Gegenkraft verwendet um eine Masse
'ruhig' zur Referenzfläche zu halten.
Auch die sehr empfindlichen Seismometer arbeiten heutzutage überwiegend
mit Servosensoren und eingebautem Integrator, bei Empfindlichkeiten von
gerne 2000 V/(m/s).
BZGL MEMS: U.a. Analog Devices baut auch nicht so billige BS als MEMS,
die gar nicht soo schlecht sind. Vieles in diesem Bereich hat aber
DUAL-USE (Trägheitsnavigation)
Franko P. schrieb:
> Unterschied zwischen ICP und IEPE
Sind nur die Herstellerbezeichnungnen
ICP (PCB), Deltatron (B&K) sind Herstellerbezeichnungen, bei IEPE bin
ich mir nicht sicher (Kistler?, Endevco?), CCLD (Constant Current Line
Drive) gibts auch noch. Es hat sich ein Quasistandard eingebürgert, es
gibt dazu keine Norm.
Was Du beschreibst nennt sich TEDS (IEEE 1451), dabei wird bei IEPE
Sensoren die Stromrichtung umgedreht und in diesem Betriebsmodus können
Sensordaten gelesen (und geschrieben) werden. Nicht alle IEPE Sensoren
können das, und einen TEDS-fähigen IEPE-Simulator müsste man sich bauen
(lassen). Da ist der Bedarf zu gering :D . Ich würde aber nicht
ausschließen, dass bei den Herstellern der Auslesegeräte (sprich TEDS
fähigen IEPE-Verstärkern bzw Erfassungsgeräten) solche Teile in der
Entwicklung stehen.
Bei Beschleunigungssensor und Geschwindigkeitssensor muss ich dir
nochmals widersprechen. Wenn du einen Beschleunigungssensor auf etwas
montierst und beschleunigst, bekommst du ein Signal so lange sich die
Geschwindigkeit ändert. Sobald sich der gegenstand mit konstanter
Geschwindigkeit bewegt, bekommst du kein Signal mehr. Damit sind das
eben Beschleunigungssenosren und keine Geschwindigkeitssensoren. Welchen
Geschwindigkeitssensor kennst du, der auch bei konstanter
Geschwindigkeit ein Signal liefert?
Gruß
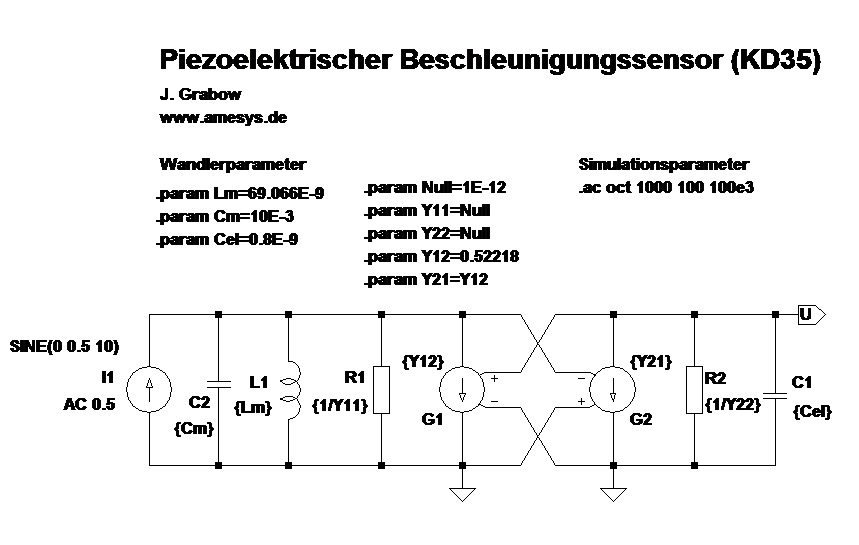
Wenn es noch relevant ist...
Ich habe mal vor einiger Zeit das Modell eines KD35 (Metra
Mess- und Frequenztechnik) erstellt.
Bei Fragen dazu, einfach melden.
Weg- und Geschwindigkeitssensoren brauchen ein Bezugssystem. Der BS
nicht, dem reicht die Kraft auf eine bekannte Masse.
Ein Doppler-(Radar/Laser)system wäre ein DC-fähiges Beispiel für einen
Geschwindigkeitssensor. Funktioniert auch ohne Echo wenn die
Sendefrequenz bekannt ist.
Oder eben ein Geophon, dessen Ruhemasse zwar nur eine begrenzte Strecke
über funktioniert, gehöhrt auch dazu. Rege ein Geophon mit einem
dreieckförmigen Wegverlauf an (im Rahmen der Wegbegrenzung also
überwiegend konstante Geschwindigkeiten) und man erhält ein (etwa)
rechteckiges, geschwindigkeitsproportionales Ausgangssignal. :)
Wie die Ecken aussehen sei mal egal, die dürfen auch Rund sein ;)
Vielleicht haben wir ja nur unterschiedliche Vorstellungen von einem
Geschwindigkeitssensor. Klar kann man einen Radarsensor als einen
Geschwindigkeitssensor ansehen, und der kommt der Vorstellung ja auch am
Nächsten. Denn Geschwindigkeit als Größe Distanz/Zeit benötigt ein
Bezugssystem. Aber die Sensoren, die eben nur bei Beschleunigung ein
Signal liefern, und dazu gehört aber auch die Richtungsänderung, da
unbeschleunigte Bewegung immer geradeaus ist, ist eben ein
Beschleunigungssensor. ich habe mich im Rahmen meiner letzten Arbeit im
Prüfstandsbau lange mit dem Thema abgequält....
Ein übliches Sensorprinzip besteht aus einer elastisch gelagerten
seismischen Masse. Wird eine sehr steife Lagerung gewählt, ist die
Trägheitskraft und damit bei bekannter seismischer Masse die
Beschleunigung proportional zu Beschleunigung des Gehäuses
(Gehäuseerregung). Bei einer sehr geringen Elastizität (weiche Lagerung
der seismischen Masse) ist der Weg proportional zu Trägheitskraft. Bei
einem Geophon wird die Bewegung der seismischen Masse über das
Induktionsprinzip gemessen. Da die Lorentzkraft proportional zur
Geschwindigkeit ist, wird also die Schwinggeschwindigkeit in eine
proportionale Spannung gewandelt.
Wie wir sehen, ist die Bauform für alle drei Größen (Beschleunigung,
Geschwindigkeit, Weg) im Prinzip gleich, nur die Dimensionierung bzw.
die Gewinnung einer proportionalen Spannung unterscheidet sich.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
|