
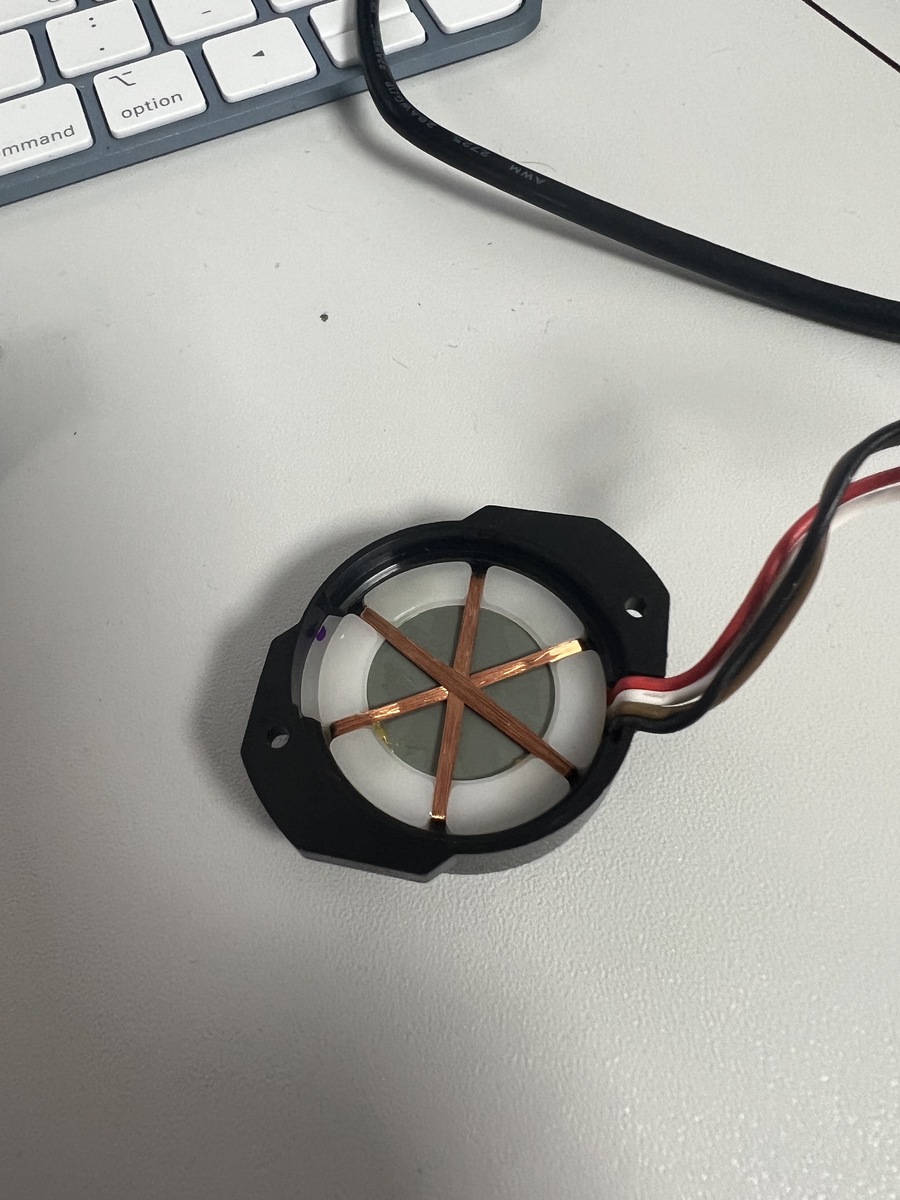
Hallo liebe Community, ihr könnt mir doch bestimmt sagen, was das für ein Encoder/Resolver ist. Sieht irgendwie aus wie ein 3Ph Minigenerator aus.
Angehängte Dateien:
-

Encoder.jpg
230 KB -

Encoder_Offen.jpg
240 KB
Pollin sagt: "Bipolar Schrittmotor mit 4-poligem Anschluss und Drehrichtungsgeber"
Thomas W. schrieb: > Pollin sagt: "Bipolar Schrittmotor mit 4-poligem Anschluss und > Drehrichtungsgeber" Ja schon klar 😅. Aber was ist das für ein encoder? Deshalb auch das zerlegte...
Die Positionsrückmeldung. ich nehme an, der arbeitet in 1/6 während der Motor innen eine 1/4/N Auflösung hat. Die Verknüpfung ergibt dann etwas um die 1/24/N
Wie liest man den encoder dann am besten aus? Nulldurchgang?
Jan O. schrieb: > Nulldurchgang? Ja. Schauen in welcher Reihenfolge die Nulldurchgänge auf den Wicklungen kommen, damit hast du die Drehrichtung und kannst die U/min berechnen. Kannst natürlich da auch mehr Aufwand betreiben, und die Signale analog auswerten, dreimal Sinus drübermatchen, ...
https://www.tamagawa-seiki.com/assets/img/downloads/pdf/stepmotor/1648N8EJ.pdf Aber ein Modell von 1987 (?) wird da nicht mehr angeboten. 0,9° sind schon fast die höchste Auflösung, 1.8° sind häufiger. Noch ohne Encoder, weitere Kataloge: https://www.tamagawa-seiki.com/downloads/pdf/
Christoph db1uq K. schrieb: > ,9° sind schon fast die höchste Auflösung, 1.8° sind häufiger. ist das nicht so ein Maschinenencoder? Wir haben welche, die 1200 Pulse je Umdrehung liefern. 360/1200 -> 0,3°
Angehängte Dateien:
-

Schrittmotor1.png
4,4 KB
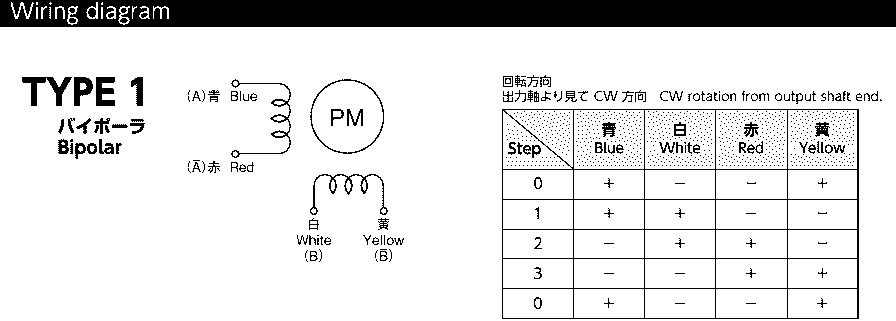
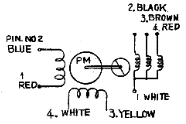
Die Kabelfarben scheinen noch mit dem Katalog übereinzustimmen Blau/Rot/Weiß/Gelb für den Motor. Rot/Braun/Schwarz/Weiß der "Drehrichtungsgeber". Das scheint kein digitaler Encoder zu sein, sondern ein analoger Sensor. Nennt man das "Resolver"? Die haben eher 6 Anschlüsse, eine Primärwicklung und zwei um 90 Grad versetzte Sekundärwicklungen, sin und cos genannt. Hier haben wir drei um 120 Grad versetzte Wicklungen.
Gibt wahrscheinlich analoges Quadratur-Signal, Anzahl Schritte entsprechend dem Interpolator, der dahinter hängt.... Wobei bei 3 Wicklungen eher eine Hexratur wäre.
Wikipedia weiß Rat https://de.wikipedia.org/wiki/Resolver "Ein induktiver Drehgeber mit drei um 120° versetzten Statorspulen wird Synchro genannt." https://de.wikipedia.org/wiki/Drehmelder Deren Auswertung scheint etwas spezielles zu sein, da muss man sich erst mal schlau machen. Vor allem, weil heute digitale Sensoren gängiger sind. https://www.analog.com/en/product-category/synchroresolver-to-digital-converters.html Analog Devices hat dazu spezielle ICs, alles was "Synchro" heisst ist "Last Time Buy", nur Resolver gibt es noch. Anscheinend hat es einen Grund, dass Pollin die so günstig anbietet.
Rote T. schrieb: > Gibt wahrscheinlich analoges Quadratur-Signal, Sinus + Cosinus würde ich sagen. Es gibt auch analoge Geber auf Magnetbasis in Chip-Form, die so arbeiten. Als MEMS z.B. Christoph db1uq K. schrieb: > Deren Auswertung scheint etwas spezielles zu sein, Idee?
Als erstes mal die Datenblätter von AD lesen, das sind nur fünf Typen AD2S44, RDC1740 und SDC1740-42. Und die sind ziemlich teuer. Der erste ist seit 2014 obsolet, die anderen vier haben ein gemeinsames Datenblatt: https://www.analog.com/media/en/technical-documentation/data-sheets/SDCRDC1740_1741_1742.pdf Mit Micro-transformers im Hybrid-IC, daher auch der Preis. https://en.wikipedia.org/wiki/Scott-T_transformer das ist anscheinend der Zweck der Trafos, die wandeln das dreiphasige Signal in ein zweiphasiges um. Synchros wurden laut Wikipedia schon seit 1914 in den Schleusen des Panama-Kanals benutzt. Sicher kann man die drei Spannungen auch digitalisieren und irgendeinen DSP-Algorithmus drüber laufen lassen, vermutlich gibt es dazu sogar Beispielsoftware im Web. Aber man kann den Schrittmotor mit geringerer Auflösung auch ohne Synchro benutzen. Wenn man eine Absolutposition braucht, reicht auch eine Lichtschranke, die einen Impuls pro Umdrehung abgibt,
Christoph db1uq K. schrieb: > Sicher kann man die drei Spannungen auch digitalisieren und irgendeinen > DSP-Algorithmus drüber laufen lassen, Was wäre denn mit kapazitver Anbindung und Schmitttrigger? Dann hätte man doch AB-Impulse. Ist halt grob.
Manni T. schrieb: > hätte man doch AB-Impulse. Ist halt grob. Och, das geht viel feiner. Hat mich an oldschool Resolver, Melexis MLX90510 und AMS AS5715 erinnert. Nur, drei Spulen lassen sich vielleicht an drei Leitungen anschließen. Ist wirklich was spezielles, denn egal ob es ein oldschool Resolver oder sowas nach dem Prinzip der moderneren Dinger ist, es fehlt die dedizierte Erregerspule. Die 120° Anordnung passt nicht zum klassischen Prinzip. Aber, wir haben noch nicht gesehen, was sich unter der metallisch aussehenden Platte verbirgt. Ich vermute ... a) dass sich da drin eine Kurzschlusswindung oder ein zweiflügeliges "Target" (vgl. o.g. Sensor-ICs) befindet. Zur Funktion würde passen, dass ein rotierendes Feld eingeprägt wird. Es ergeben sich Minima in der Impedanz, die sich in doppeltem mechanischem Drehwinkel des Schrittmotors wiederholen. Die Impedanzen der Einzelspulen durch die Clarke-Transformation und atan2 geschoben ergibt (Drehwinkel×2). b) magnetisches Target und es wird magnetischer Sättigungseffekt genutzt. Jetzt hat die Stromantwort eine Harmonische der doppelten Erreger-Umlauffrequenz. Damit ist die 180°-Ambiguität aus Vermutung a) aus dem Spiel. c) rotierende Kurzschlusswindung mit Diode. An sich nur eine Variante von b) Und jetzt bitte weiter zerlegen, damit wir was sehen können ;) Was ist auf dem hinteren Wellenende montiert? mfg mf PS. Synchros sind nur "umgedrehte Resolver". Da fehlt eine Wicklung.
Angehängte Dateien:
-

Schrittmotor2.png
14 KB
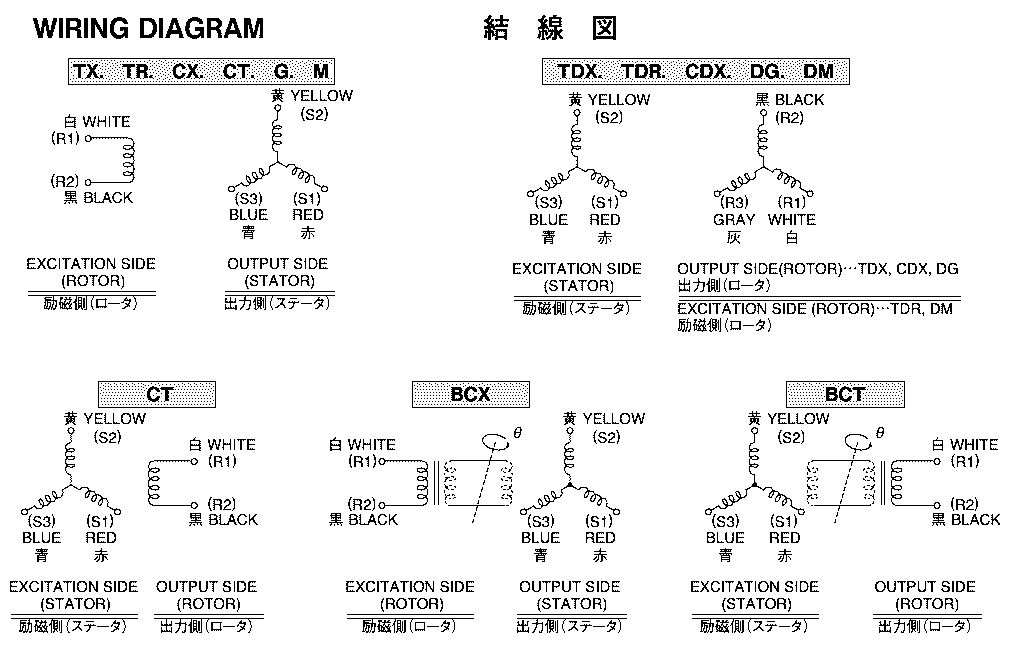
Die vier Anschlüsse des mutmaßlichen Synchro sind mindestens einer zu wenig, wenn ich den "Synchros-Catalog" von tamagawa-seiki.com anschaue. Es wäre interessant, ob hier auch schwarz und weiß eine unten versteckte Erregerspule sind, dann bleiben aber nur zwei Anschlüsse für drei Wicklungen.
Achim M. schrieb: > es wird magnetischer Sättigungseffekt > genutzt. Jetzt hat die Stromantwort eine Harmonische > der doppelten Erreger-Umlauffrequenz. Ergibt eine solche Sättigung nicht die dritte Harmonische?
Es gibt vom IC-Haus um wenig Geld Auswertebausteine die analoge sin/cos Signale in Digital A/B umsetzen können. Dabei kann man unter vielen Unterteilungen wählen. Einziger Nachteil, das sind so gut wie ausnahmslos SMD-ICs.
Angehängte Dateien:
-

schrittmotor_db.PNG
330 KB
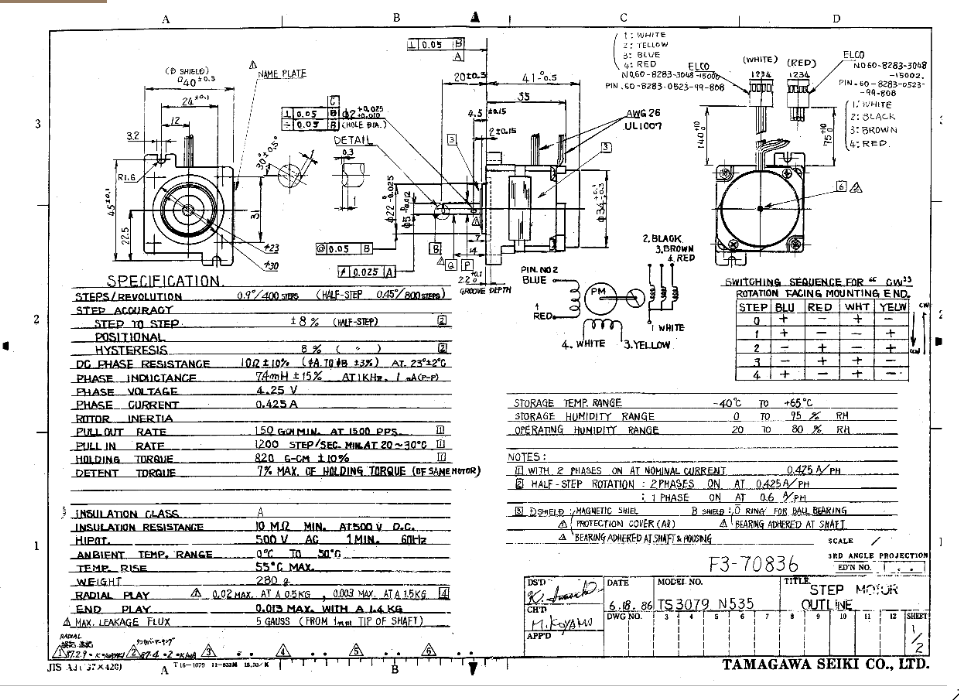
Hallo zusammen, vorab: ich bin blutiger Arduino-Anfänger und hatte in den bisherigen 60 Jahren nie Kontakt zu sowas. ;-) Zu diesem Schrittmotor bin ich gekommen wie die Jungfrau zum Kinde und genauso fand ich dann diesen Beitrag. In der Anlage habe ich zu diesem Motor etwas gefunden, das ich mit euch teilen möchte. Wenne es euch hilft, freue ich mich und vielleicht komme ich dann auch weiter. ;-) Gruss Heinz
Angehängte Dateien:
-

schrittmotor.png
2,8 KB
na prima! Mit einem IC für sin/cos-Signale wird das aber nicht funktionieren, das ist wirklich "Drehstrom" mit 120 Grad. Anscheinend war die Lösung von Analog Devices tatsächlich ein "Drehstromtrafo" der das in zwei sin/cos Signale umwandelt und dann kann man diese Resolver-ICs benutzen. Und wie vermutet, ist der Erreger rein passiv, ein rotierender Magnet. Wahrscheinlich reicht es aus, die drei Drehstromsignale mit Schmitt-Triggern in Rechtecke umzuwandeln und ähnlich den Drehencodern auszuwerten. Ein RS485 Linereceiver würde dazu ausreichen, damit wird die Schwingung sogar differentiell ausgewertet.
Christoph db1uq K. schrieb: > Und wie vermutet, ist der Erreger rein passiv, ein rotierender Magnet. Na also :) Manni schrieb: > Achim M. schrieb: >> es wird magnetischer Sättigungseffekt >> genutzt. Jetzt hat die Stromantwort eine Harmonische >> der doppelten Erreger-Umlauffrequenz. > > Ergibt eine solche Sättigung nicht die dritte Harmonische? AC auf'n Trafo haste Recht. Hier wird das Eisen jedoch mit einem Permanentmagneten vorgesättigt. Daher geradzahlige Harmonische. Oder meinst du mit dritte harmonische die vierfache Frequenz? mfg mf
> RS485 Linereceiver Da gibt es mehrere vierfache von TI: https://www.ti.com/interface/rs-485-rs-422/products.html#994=4&sort=994;desc&; Das hätte den Vorteil, dass die Rechtecke einigermaßen symmetrisch sind, weil ein DC-Offset wegfällt. Eine untere Grenzfrequenz hat der Synchro halt, durch das induktive Verfahren. Wenn man zu langsam dreht wird die Amplitude zu klein. Da die Schwingungen nur einmal pro Umdrehung auftreten ist die Frequenz sicher klein genug, um das z.B. mit einem Arduino auszuwerten. Wie man das mit der Ansteuerung des Schrittmotors verknüpft, um eine bessere Auflösung zu bekommen, weiß ich nicht.
Christoph db1uq K. schrieb: > Wahrscheinlich reicht es aus, die drei Drehstromsignale mit > Schmitt-Triggern in Rechtecke umzuwandeln und ähnlich den Drehencodern > auszuwerten. Ist halt sehr grob. Eine Verbesserung wäre, das Signal auf einen OP, gleichrichten und die Frequenz zu verdoppeln. Eine vernünftige Auswertung eines analogen Encoders gelingt eigentlich nur mit ADC. Mit einem UC geht es bei geringen Geschwindigkeiten auch so, wenn man schon einen im der Schaltung hat: Beitrag "Re: ADC_im_VHDL_implementieren"
Christoph db1uq K. schrieb: > Da die Schwingungen nur einmal pro Umdrehung auftreten ist die Frequenz > sicher klein genug, um das z.B. mit einem Arduino auszuwerten. Ich denke nicht, dass das primäre Prinzip eine induzierte Spannung durch Drehung des Sensiermagneten ist. Auch zumal Schrittmotoren vergleichsweise langsam drehen und eine Positionserkennung im Stillstand für closed-loop-Servobetrieb extrem nützlich ist. mfg mf
Das Datenblatt ist vom 18.6.1986. Ich versuche die vorgesehene Drehzahl daraus zu ermitteln: Die Maßeinheit Gramm mal Zentimeter statt Newtonmeter für ein Drehmoment ist etwas ungewöhnlich. Da ist vermutlich die Erdbeschleunigung mit eingerechnet, die hängt doch von der Montagerichtung ab. Im heutigen Katalog sind ein paar Angaben dazu: https://www.tamagawa-seiki.com/assets/img/downloads/pdf/stepmotor/1648N8EJ.pdf Seite 61 die Umrechnungstabelle 1 gcm = 9.8066 x 10−5 Nm Eine "pull-out rate" gibt es nicht aber ein "pull-out torque" wird zu allen Motoren angegeben. Im Datenblatt pull-out rate = 150 gcm bei 1500 Pulsen pro Sekunde. Mit 400 Pulsen pro Umdrehung sind das knapp 4 Umdrehungen pro Sekunde. Ebenfalls im Datenblatt "Pull-in rate" von 1200 Schritte pro Sekunde minimal. Mit 400 Schritten pro Umdrehung wären das 3 Umdrehungen pro Sekunde. Das klingt alles ziemlich langsam. Ich begreife es nicht. Aber ich hatte mit dem Thema auch noch nie zu tun. > Positionserkennung im Stillstand Man hat ja sozusagen zwei Messmöglichkeiten, die bisher ausgeführte Schrittzahl des Motors (400 steps/Umdrehung), die keine absolute Positionsangabe liefert, und die Drehstromsignale, die zwar nur je eine Schwingung pro Umdrehung abgeben, aber eine absolute Position angeben. Durch genauere Auswertung der Sinusschwingungen könnte man das noch genauer bekommen, aber ob das die 400/Umdrehung des Motors noch verbessert?
Christoph db1uq K. schrieb: > und die Drehstromsignale, die zwar nur je eine > Schwingung pro Umdrehung abgeben Ich fragte mich, ob bei so langsamer Drehung überhaupt eine verwertbare induzierte Spannung aus dem als "Dreiphasen-Tachogenerator" betriebenen Sensor raus kommt. "Viele" Windungen sieht man ja... Andererseits, wie und ob, hat man Christoph db1uq K. schrieb: > 18.6.1986. sich schon um closed-Loop Betrieb von Steppermotoren Gedanken gemacht? Also vielleicht doch eher eine art Failsafe, der auf Zählen ganzer mechanischer Umdrehungen beruht. Da kann man die 200 Pulse vom Stepper mit dem Umdrehungszähler vom Sensor vergleichen und gut. Blöd, dass man da aber nicht mit niedrigen Geschwindigkeiten fahren kann, weil, siehe oben... mfg mf
Mann Fred schrieb: > Sinus + Cosinus würde ich sagen. Es gibt auch analoge Geber auf > Magnetbasis in Chip-Form, die so arbeiten. Als MEMS z.B. Sinus und Cosinus hatten zumindest früher immer einen Phasenversatz von 90°. Das passt bei drei Spulen nicht. Und wie soll da ein Mikro-Elektro-Mechanischen System im Spiel sein? Ein Magnetfeldsensor wäre naheliegender.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.