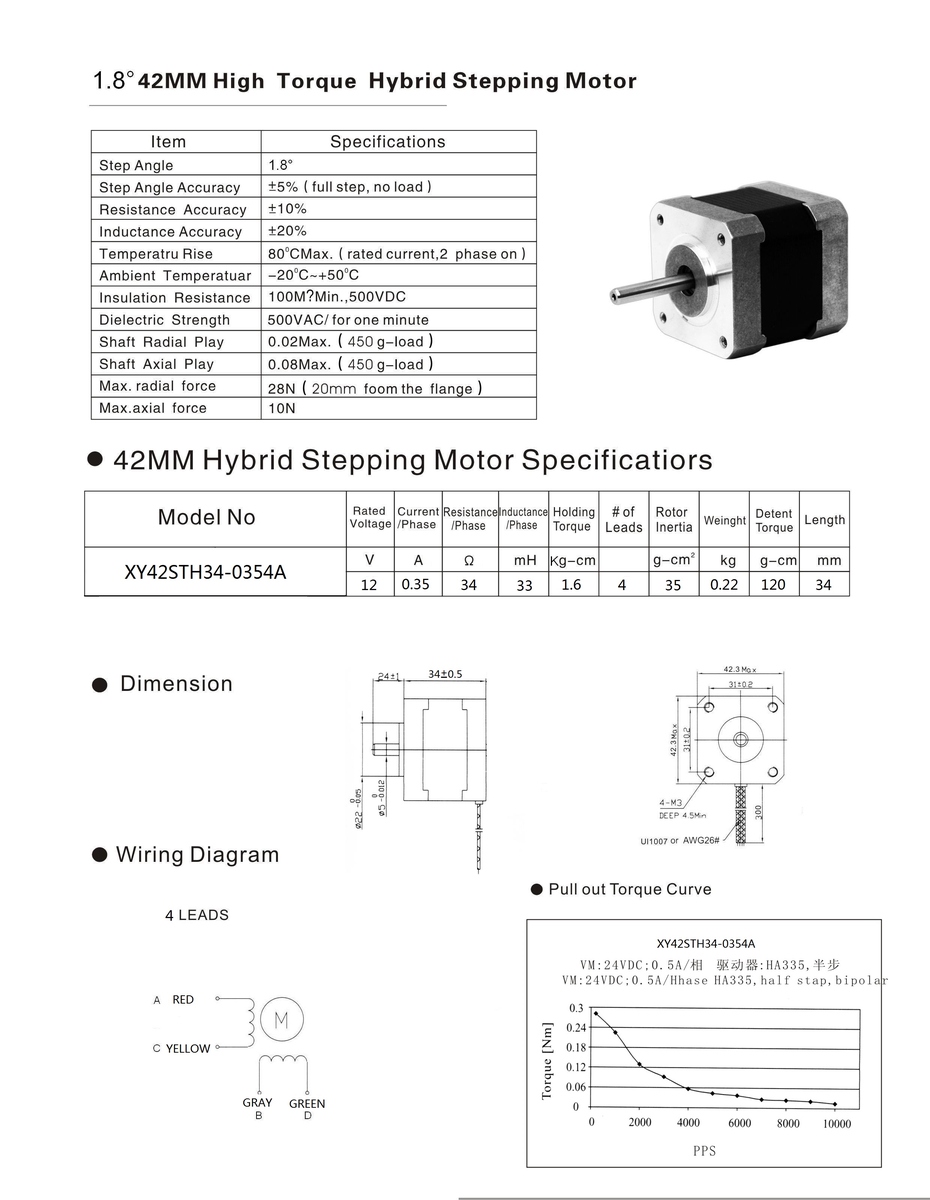
Hi, Ich möchte für eine Linearachse einen Schrittmotor auf ca. 1000 - 1500 RPM drehen lassen. Das ganze läuft auf einem BOOSTDRV8711 Evalboard von TexasInstruments, zusammen mit einem ESP8266 D1 mini und einigen simplen codezeilen. Leider kriege ich es nicht hin, den Motor auf ca mehr als 300RPM drehen zu lassen und wollte fragen, ob ihr mir hier hilfestellung leisten könnt. Konfigurieren tu ich den DRV8711 IC über SPI, die Steps schreibe ich aber über einen Digitalen Output und nicht über das SPI interface. Nach meinem Vermuten liegt es daran, dass ich die verschiedenen timings (TOFF,TBLANK,TDECAY, etc.) nicht sauber eingestellt habe, habe aber auch mit viel rumröbeln keine settings gefunden welche gut funktionieren. Das Wiring stimmt ganz bestimmt, da ich die Werte ändern kann und sich dies auch auf das Verhalten am Motor auswirkt. Je nach Settings vibriert der Motor nur oder dreht irgendwo zwischen 200 und 300RPM. Habe den Motor auf diversen Microsteps betrieben und allem Anschein nach, steht die Step-Frequenz zur Anzahl Microsteps immer im Verhältnis. Also bei doppelter Step-Frequenz und doppelter Anzahl Microsteps dreht der Motor auch mehr oder weniger gleich schnell, was Sinn macht. Kann mir jemand helfen oder hat bereits Erfahrungen mit diesem Motortreiber gesammelt? Kann es auch möglich sein, dass die Geschwindigkeit durch die Technischen Spezifikationen der MOSFETS (Gate Charge, etc.) limitiert sind. Im Anhang einige Datenblätter. Danke im Vorraus
Angehängte Dateien:
-

Datasheet_Steppermotor.jpg
230 KB
Mit welcher Spannung läuft der Schrittmotor und welches Drehmoment brauchst du ?
Rüdiger B. schrieb: > Mit welcher Spannung läuft der Schrittmotor und welches Drehmoment > brauchst du ? Betreibe den Schrittmotor auf 12V. Das Drehmoment ist untergeordnet, bin mir ehrlich gesagt auch nicht sicher wo das im "Datenblatt" genau steht. Prozentual am liebsten 100%. Stromaufnahme ist 0,35A. Kann man darüber das Drehmoment rechnen?
Das ist der Fehler, Spannung ruhig auf 24 oder 36 Volt, Strom wie im Datenblatt auch gerner 0,4 A. Die 12 Volt im Datenblatt bedeuten nicht das du nur eine Versorgungsspannung von 12 V verwenden darfst.
Dieser Motor ist in einem 3D Drucker drin und wird mit 24 Volt betrieben: https://www.my-home-fab.de/de/dokumentationen/technische-beschreibungen/technische-daten-zum-nema-17-42byghw609 Du brauchst die Spannung, der Strom wird vom Treiber begrenzt.
Rüdiger B. schrieb: > Das ist der Fehler, Spannung ruhig auf 24 oder 36 Volt, Strom wie im > Datenblatt auch gerner 0,4 A. Die 12 Volt im Datenblatt bedeuten nicht > das du nur eine Versorgungsspannung von 12 V verwenden darfst. Danke für deine Antwort. Werde das so nochmals austesten. Kann also ein 48V-Schrittmotor beispielsweise auch höher wie 48V betrieben werden? Und wie empfiehlst du meine Timings? Sind die Standardmässig gesetzten ungefähr gut?
Manuel N. schrieb: > Kann also ein > 48V-Schrittmotor beispielsweise auch höher wie 48V betrieben werden? Moderne Schrittmotortreiber regeln den Strom. Die maximal für den Betrieb zulässige Spannung wird durch den Treiber und nicht durch den Motor bestimmt. Manuel N. schrieb: > Stromaufnahme ist 0,35A Die Stromaufnahme sagt nicht viel und sollte mit höherer Spannung sinken. Wichtig ist, wieviel Strom bei maximaler Drehzahl noch durch die Motorwicklungen fließt.
1000 U/min bedeutet eine Schrittfrequenz von 6.6kHz im Halbschrittbetrieb. (3.3kHz bei Vollschritt) Das schafft dieser kleine Motor selbst unter optimalen Bedingungen nicht. Schau dir mal die Drehmomentkurve an. Da kannst du an den Parametern spielen wie du willst. Vielleicht wäre es möglich mit einer optimalen Rampe den Motor auf diese Drehzahl zu bringen, Das hängt aber ganz wesentlich von den mech. Resonanzen ab. Für 1000 oder gar 1500 U/min musst du andere Kaliber auffahren.
Thomas Z. schrieb: > Vielleicht wäre es möglich mit einer optimalen Rampe den Motor auf diese > Drehzahl zu bringen Was ist eine optimale Rampe? Feste Beschleunigung? Ruck maximal wie groß? Eine vernünftige Rampe ist doch hoffentlich konfiguriert oder wie wird der Motor aktuell auf die Drehzahl gebracht?
> Das schafft dieser kleine Motor selbst unter optimalen Bedingungen nicht.
Ja, dieser Motor hat eine viel zu hohe Induktivität. Diese alten Motoren
mit 12V Nennspannung sind vollkommen ungeeignet.
Du brauchst einen Motor, der laut Datenblatt nur 2V Spannung hat. Wie
bereits gesagt, betreibst du den mit der höchsten Spannung, die dein
Treiber verträgt.
Thomas Z. schrieb: > 1000 U/min bedeutet eine Schrittfrequenz von 6.6kHz im > Halbschrittbetrieb. (3.3kHz bei Vollschritt) Das schafft dieser kleine > Motor selbst unter optimalen Bedingungen nicht. Schau dir mal die > Drehmomentkurve an. Da kannst du an den Parametern spielen wie du > willst. > Vielleicht wäre es möglich mit einer optimalen Rampe den Motor auf diese > Drehzahl zu bringen, Das hängt aber ganz wesentlich von den mech. > Resonanzen ab. > > Für 1000 oder gar 1500 U/min musst du andere Kaliber auffahren. Danke für deine Antwort. Habe in der Tat allerhöchstens 1000U/min hingekriegt. Das aber nur mit einer seeehr langen Rampe (ca. 2 Minuten von 0% auf 100%). Was meinst du mit "andere geschütze auffahren"? Liegt es am Motor oder am Treiber oder sonst wo? Würde man das mit einem grösseren Motor besser hinkriegen?
Xanthippos schrieb: >> Das schafft dieser kleine Motor selbst unter optimalen Bedingungen nicht. > > Ja, dieser Motor hat eine viel zu hohe Induktivität. Diese alten Motoren > mit 12V Nennspannung sind vollkommen ungeeignet. > > Du brauchst einen Motor, der laut Datenblatt nur 2V Spannung hat. Wie > bereits gesagt, betreibst du den mit der höchsten Spannung, die dein > Treiber verträgt. Danke für deine Antworten! Was hat eine hohe induktivität zur Folge?
Angehängte Dateien:
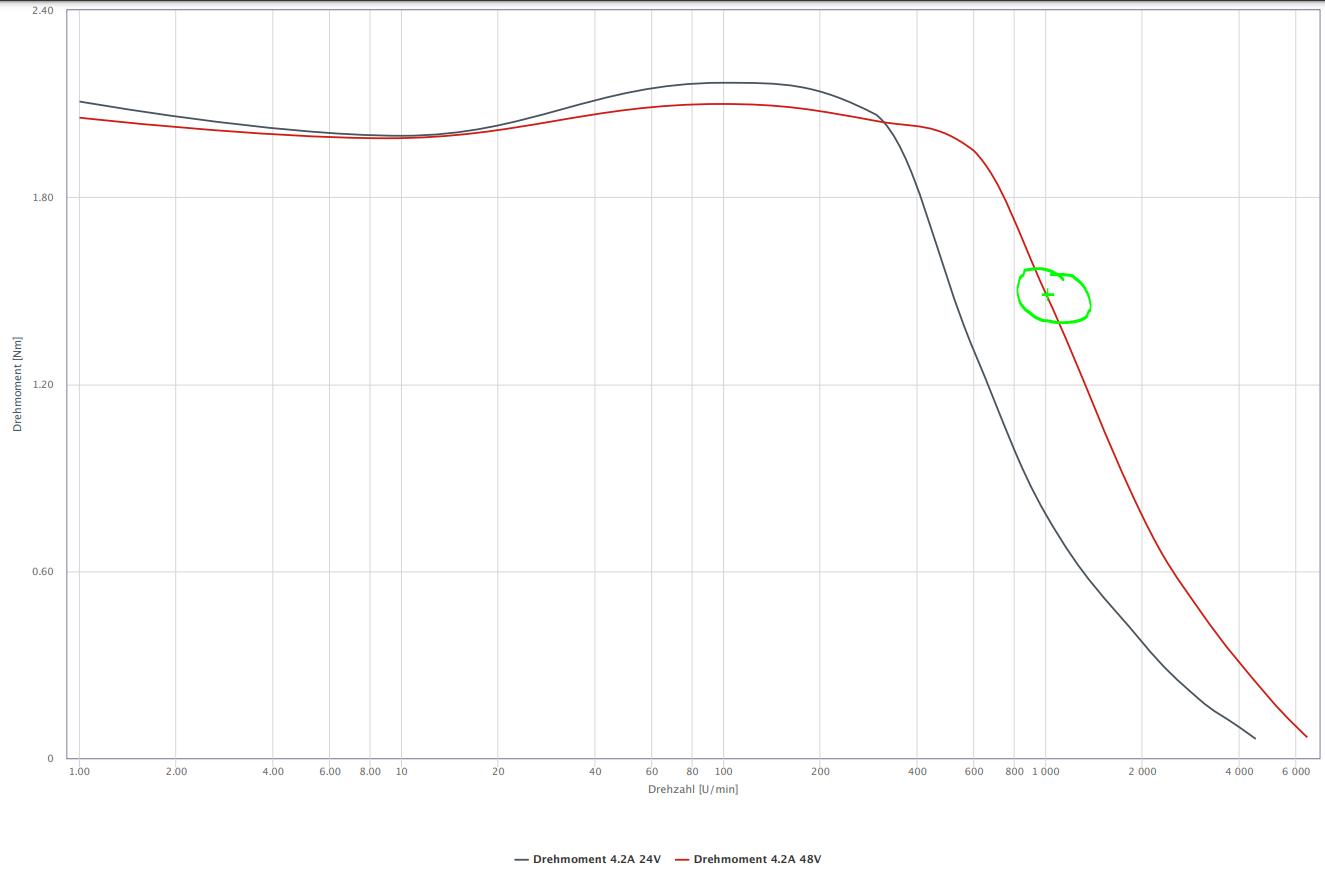
Noch eine andere Frage bezüglich der Schrittmotoren. Für ein anderes Projekt benötige ich noch einen Schrittmotor mit höherer Drehzahl und auch höherem Drehmoment. Habe nochmals zwei Dokumente (Datenblatt & Drehzahl-Drehmoment-Kennlinie) angefügt. Kann ich diesen Motor mit einer praktikablen Rampe von 0U/min auf 1000U/min bei entsprechendem Drehmoment von 1,5Nm betreiben?
2 Minuten Rampe kann nicht sein, das ist doch kein Schiffsdiesel, in 2 Sekunden kann so ein Motor hochdrehen. Hört sich also eher nach schlecht realisierter Rampe an. Mit Encoder und Regelung bekommt man auch bessere Beschleunigung und höhere Drehzahl, aber das Drehmoment nimmt trotzdem rapide ab.
Manuel N. schrieb: > Würde man das mit einem grösseren Motor besser hinkriegen? Damit ein Motor sich schnell drehen kann, muss er nicht größer sein, sondern eine geringere Induktivitöt besitzen, d.h. die Drehmomentkurve darf nicht schon bei geringer Drehzahl so stark einbrechen. Hast du inzwischen den Strom bestimmt, der tatsächlich noch durch die Motorwicklung fließt, wenn dein Motor sich mit Grenzgeschwindigkeit dreht?
Manuel N. schrieb: > Kann ich diesen Motor mit einer praktikablen Rampe von 0U/min auf > 1000U/min bei entsprechendem Drehmoment von 1,5Nm betreiben? Die Steilheit der Rampe hängt u.a. davon ab, wie sich das vom Motor aufgebrachte Drehmoment in statisch aufzubringendes Drehmoment und Beschleunigung aufteilt. Beschleunigt werden muss die angetriebene Masse inklusive Rotor des Motors. Systemresonanzen können sich ebenfalls in Form von zusätzlichem Lastdrehmoment auswirken und zum Stall führen (Überschreitung des maximalen Lastwinkels).
So Hohe Drehzahl UND Schrittmotor ? Warum kein BLDC Motor ?
Manuel N. schrieb: > Ich möchte für eine Linearachse einen Schrittmotor auf ca. 1000 - 1500 > RPM drehen lassen 1500rpm bei 200 Schritten/Umdrehung sind 5kHz. Da bringt der Motor noch 0.04Nm wenn er mit 24V/0.5A bestromt wird. Manuel N. schrieb: > Betreibe den Schrittmotor auf 12V. Also zu wenig, so schafft er nur die Hälfte des Diagramms und das ist bei 10000 zu Ende. Ein Motor mit 12V Wicklung und 33mH ist auch praktisch ungeeignet für hohes Tempo. Man nimmt dazu eher Motoren mit 2mH, 2A und 2V. Ein 12V Motor an 12V Versorgung kann sowieso nicht am Mikroschritttreiber wie DRV8711. 12V an 33mH brauchen 1ms bis der Strom auf 0.35A steigt. Du hast bei 5kHz aber nur 200us. Benutze zumindest 48V. Die 0.5Apeak die er für volle Leistung von 0.35Arms erreichen müsste, schafft er aber trotzdem nicht. Wechsle besser die Motoren wie oben genannt. https://dse-faq.elektronik-kompendium.de/dse-faq.htm#F.10
Rüdiger B. schrieb: > So Hohe Drehzahl UND Schrittmotor ? Warum kein BLDC Motor ? Gute und berechtigte Frage. Vielleicht reicht es auch, die Ansprüche etwas zu reduzieren. Mit passendem Motor und höherer Versorgungsspannung >= 24 V sind 1000 Upm erreichbar - ein mechanisch schwingungsarmer Aufbau vorausgesetzt. Bei der Resterampe gäbe es einige Angebote für die Motoren. Beispiel: https://www.pollin.de/p/act-motor-schrittmotor-17hs4417-1-80-2-phasen-2-55-v-310779 Fertige Module für die Ansteuerung sind auch nicht mehr so kostspielig: https://www.pollin.de/p/act-motor-schrittmotortreiber-nema17-dm430-12-32-vdc-6-0-a-310860 Für die Takterzeugung wäre ein PicoPi-Board mit RP2040 gut geeignet: hohe Taktraten möglich und genug Leistung für die Rampenerzeugung zur Laufzeit. Xanthippos schrieb: > Diese alten Motoren > mit 12V Nennspannung sind vollkommen ungeeignet. Die Motore müssen nicht unbedingt alt sein, sie sind nur für andere Anwendungen gedacht.
In manchen Druckern z.B. HP Deskjet sind 7,5 Grad Schrittmotoren verbaut. Also mal im Schrott suchen.
Man sollte sich vergewaertigen, dass bei jedem Motor, auch einem Schrittmotor die induzierte, resp die elektromotorische Spannung proportional zur Drehzahl ist. Dazu den Schrittmotor mit einem Akkuschrauber auf diese Drehzahl bringen und die Spannung messen. Beim Antrieb muss man noch etwas drauflegen, denn man moechte noch etwas Drehmoment. Die Spezifikationen betreffen jeweils Dauerbetrieb. Dh fuer eine kurze Positionierung darf man die Werte auch etwas ueberschreiten. Der Treiber muss natuerlich Strom und Spannung liefern koennen. 48V ist das Limit, bei hoeheren Spannungen ist die Kleinspannungsnorm nicht mehr gueltig, auch wenn die Elektronik mehr koennte.
Purzel H. schrieb: > Man sollte sich vergewaertigen, dass bei jedem Motor, auch einem > Schrittmotor die induzierte, resp die elektromotorische Spannung > proportional zur Drehzahl ist. Deswegen wurde schon zum Betrieb des 12V-Motors an mindestens 24V geraten. An der Motorwicklung ist nur die um die elektromotorische Spannung reduzierte Betriebsspannung wirksam.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.