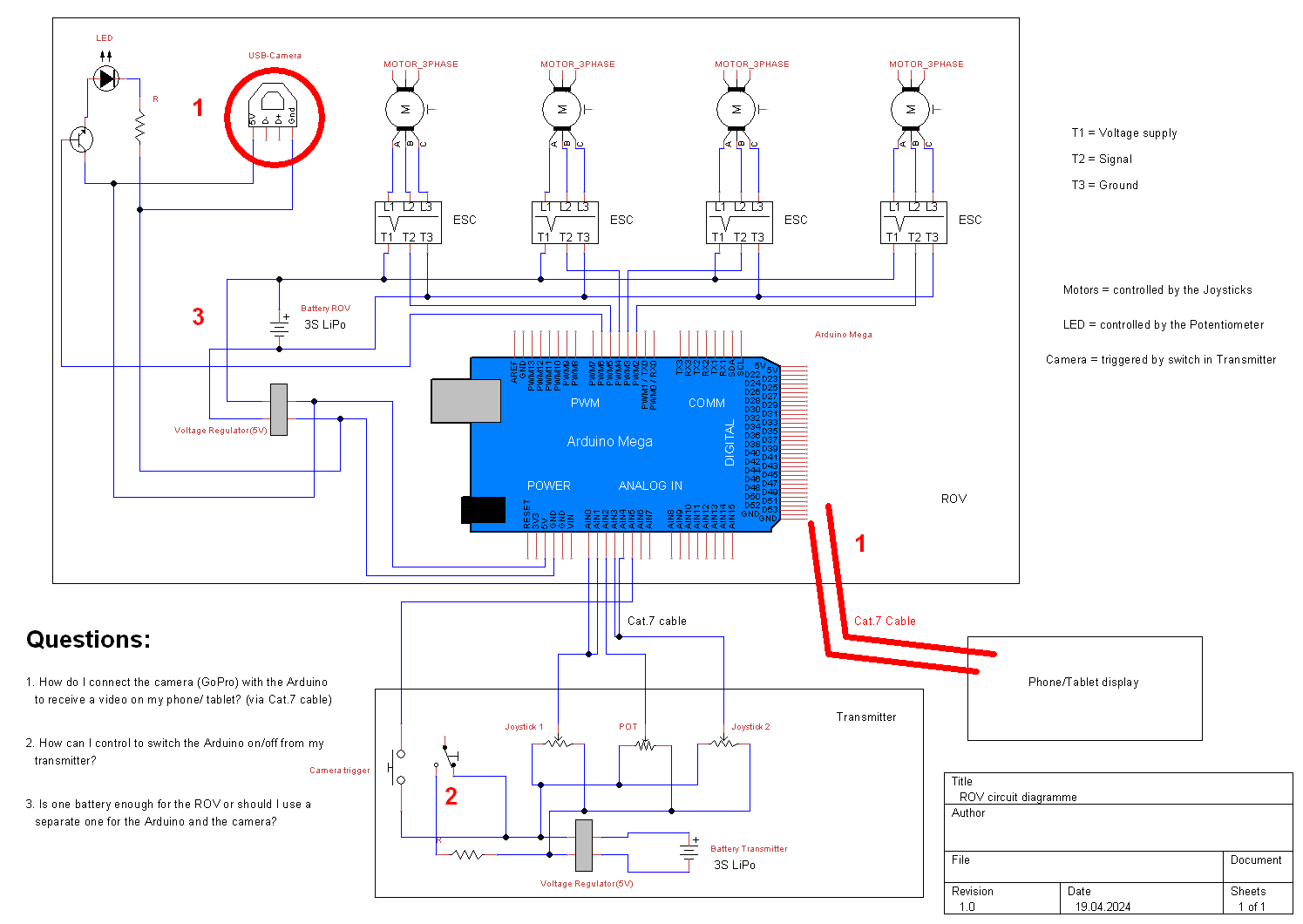
Liebe Mikrocontroller-Gemeinde, ich bin neu hier im Forum, also erstmal "Hallo". :) Sollte der Beitrag hier nicht passen, bitte einfach verschieben - über die Suchfunktion konnte ich kein für mich passendes Thema finden. Ich arbeite seit einiger Zeit an einem Projekt für meine Promotion; in Rahmen dieses Forschungsprojekts beschäftigen wir uns (von archäologisch-historischer Seite) mit Flussauen und Gewässern. Um nun auch relativ "einfach" die Gewässer untersuchen zu können, möchte ich einen Tauchroboter (ROV) nutzen. Diese gibt es zwar (inzwischen) auch zu erschwingliche(re)n Preisen, aber mich reizt das selberbauen - zumal es dann "meiner" ist und nicht der des Projekts. (: Ich habe während der letzten Monate hunderte (oder vermutlich sogar tausende...) Forenbeiträge, Tutorials, usw. gelesen und denke, dass ich einigermaßen vorangekommen bin. Im Anhang findet sich der bisherige Schaltplan (bitte die Symbole nicht zu ernst nehmen, ich konnte stellenweise keine korrekten Symbole im Programm finden bzw. war mir bei einigen auch nicht sicher, welche ich verwenden soll; die Ausbildung in der Elektr(on)ik liegt wohl doch schon länger zurück, als ich dachte ;) ). Der Grundgedanke ist folgender: Der Tauchroboter soll über vier Brushless-Motoren verfügen (auf-, abtauchen, vor- und rückwärts; letztere dann auch zum Drehen). Ich möchte eine GoPro nutzen, um a) das Videosignal an einen externen Bildschirm zu übertragen und b) Aufnahmen machen zu können. Wegen der Lichtverhältnisse unter Wasser muss natürlich zusätzliche Beleuchtung mit dran. Als Steuerung dient ein Arduino (in meinem Fall ein Arduino Mega 2560). Dieser soll über ein Cat.7-Kabel versorgt werden. Um möglichst wenige Kabel zu benötigen und aufgrund des langen Übertragungsweges, übertrage ich nur die Signale mit dem Cat.7-Kabel, die Stromversorgung kommt aus LiPo-Akkus im Tauchroboter bzw. einem Akku in der Fernsteuerung. In meiner bisherigen Planung werden die Joystick-Signale (gabs im Programm leider nicht, daher im Schaltplan meine unschöne Lösung mit den zwei Kabeln an einem Poti) über insgesamt 4 Kabel übertragen, eine weitere Signalleitung soll mit Hilfe eines Potentiometers das Licht am ROV dimmen, die sechste Leitung soll als Auslöser für die Kamera dienen. Somit blieben mir rein theoretisch noch zwei Leitungen zur freien Verfügung (korrigiert mich bitte, wenn ich irgendetwas übersehen habe), mit welchen ich gerne die Bildübertragung realisieren möchte. Und an dieser Stelle komme ich nicht mehr wirklich weiter: Die erste Frage wäre also, wie kann ich die GoPro (resp. meinen China-Kopie) an den Arduino anschließen, um mir die Videosignale an meine Fernbedienung und somit an einen externen Bildschirm (Smartphone/Tablet) übertragen zu lassen? Meine Idee dazu war, ein normales USB-Kabel (das ja zum Anschließen an den Laptop genutzt werden kann) zu zerlegen und die einzelnen Adern "separat" zu nutzen; allerdings konnte ich hierzu nirgendwo fündig werden, wie so etwas am besten realisiert werden kann... Die zweite Frage wäre: Sollten wider Erwarten noch Leitung(en) im Cat-Kabel frei sein, habe ich überlegt, einen Ein-/Ausschalter an der Fernbedienung anzubringen, um damit (bspw. mit Hilfe eines Relais) die Elektronik im ROV einzuschalten; dies ist aber kein Muss, alternativ würde ich einen Magnetschalter in den ROV einbauen, sodass ich die gesamte Elektronik erst anschalten kann, wenn alles zusammengebaut ist. Die dritte Frage ist, genügt ein Akku im Tauchgehäuse für alle Komponenten? Oder sollte ich lieber die Stromversorgung für den Arduino von jener der Motoren trennen? Ich könnte mir vorstellen, dass, sobald ich die Motoren ansteuere, ein Spannungsabfall entsteht und somit der Arduino nicht mehr mit ausreichend Spannung versorgt (was ja sehr ungünstig wäre). Aber ist das wirklich so? Was meint ihr zu meiner bisherigen Konstruktion? Falls ich irgendwelche grundlegenden Infos vergessen habe, fragt einfach! Für Verbesserungsvorschläge bin ich jederzeit offen. :) Vielen Dank schonmal im Voraus!
Angehängte Dateien:
Alexander schrieb: > Was meint ihr zu meiner bisherigen Konstruktion? Falls ich irgendwelche > grundlegenden Infos vergessen habe, fragt einfach! Für > Verbesserungsvorschläge bin ich jederzeit offen. :) Ich meine dass du nicht mal schnell einen Tauchroboter konstruieren und bauen kannst. Das erfordert neben der umfangreichen Steuerelektronik auch noch unglaublich viel Mechanik. Sowohl bei den beweglichen Teilen, wie auch beim Gehäuse. Wenn es schon an er Übertragung von Steuersignalen + Video scheitert dann solltest du dir Gedanken machen. Letztlich sollte eine einzige Datenleitung (aka Netzwerkleitung) natürlich für alles ausreichen. Man muss halt die Hardware + Software dafür beherrschen. Und dafür missbraucht man nicht das Netzwerkkabel sondern nutzt es als Netzwerkkabel. Und dann setzt man eher einen Raspi ein und keinen Arduino. Natürlich kann man sich ein Unterwasserfahrzeug BASTELN. Allerdings auch nur wenn man wirklich fit ist, was Elektronik usw. anbelangt. Bist du das? Aber selbst dann, ist es eben ein Bastelprojekt und sicher kein produktiv einsetzbarer Tauchroboter.
Cyblord -. schrieb: > Alexander schrieb: >> Was meint ihr zu meiner bisherigen Konstruktion? Falls ich irgendwelche >> grundlegenden Infos vergessen habe, fragt einfach! Für >> Verbesserungsvorschläge bin ich jederzeit offen. :) > > Ich meine dass du nicht mal schnell einen Tauchroboter konstruieren und > bauen kannst. Ich hatte ganz vergessen, weshalb ich Forenbeiträge meist nur lese, jedoch normalerweise nicht aktiv daran teilnehme...von "eben mal schnell" würde ich hier nicht sprechen, aber das ist natürlich eine Definitionsfrage. > > Wenn es schon an er Übertragung von Steuersignalen + Video scheitert > dann solltest du dir Gedanken machen. Wo genau liegt jetzt das Problem hierin? Jeder hat mal irgendwann angefangen, oder nicht? (: > Natürlich kann man sich ein Unterwasserfahrzeug BASTELN. Allerdings auch > nur wenn man wirklich fit ist, was Elektronik usw. anbelangt. Bist du > das? Ich bin gelernter Mechatroniker, würde mich aber nicht unbedingt als "wirklich" fit bezeichnen - ist alles schon ne Weile her und mein Schwerpunkt lag in der Mechanik. Aber nichtsdestotrotz, man kann Wissen auffrischen und jederzeit dazulernen. > Aber selbst dann, ist es eben ein Bastelprojekt und sicher kein > produktiv einsetzbarer Tauchroboter. Die Definition, ob das ein produktiver Einsatz ist oder nicht, bleibt ja dann aber doch mir überlassen. :)
Hallo Rüdiger, Rüdiger B. schrieb: > Tauchtiefe/Druck? die Tauchtiefe bleibt moderat, i.d.R. nicht mehr als einige Meter. Der Druckkörper, den ich verwenden will, hält ein vielfaches davon aus. > Kabellänge? Um einigermaßen flexibel im Wasser unterwegs sein zu können, dachte ich an eine Kabellänge zwischen 60 & 100m.
Alexander schrieb: > Wo genau liegt jetzt das Problem hierin? Jeder hat mal irgendwann > angefangen, oder nicht? (: Ja jeder hat mal angefangen. Aber nicht mit einem Tauchroboter. Was hast du denn bisher überhaupt schon im Bereich Elektronik gemacht? Das Ganze erfordert einfach eine gewisse Erfahrung. Eine eigene PCBA bietet sich hier ganz sicher an. Arduino-Drahtverhau und Tauchroboter passt schlecht. Hast du überhaupt schon mal was einfacheres gemacht? z.B. ein Fahrzeugroboter mit Antrieb und Sensoren? Überhaupt mal eine eigene Anwendung für sowas geschrieben? > Ich bin gelernter Mechatroniker, würde mich aber nicht unbedingt als > "wirklich" fit bezeichnen - ist alles schon ne Weile her und mein > Schwerpunkt lag in der Mechanik. Aber nichtsdestotrotz, man kann Wissen > auffrischen und jederzeit dazulernen. Kann man. Nimm ein Steckbrett.
Alexander schrieb: > Kabellänge zwischen 60 & 100m. Also Ethernet und damit mindesten einen Raspi oder so. In den ROV entweder eine Webcam und einen Switch oder die Raspikamera.
ICH würde darüber nachdenken einen Raspi (oder anderen ähnlichen PC artigen) zu nehmen der (z.B. über UART) mit einem Microcontroller für den ganzen Antrieb und Low-Level Kram und Sensorik kommunizert. Kamera ist am Raspi. Der Raspi kommunizert per irgendeinem Netzwerkprotokoll mit der Fernsteuerung und auch das Video wird natürlich über ein übliches Netzwerkprotokoll übertragen. Oder einfach direkt Netzwerkkamera. Der Charme an einer reinen Netzwerklösung ist dass du am anderen Ende die freie Gerätewahl hast. Du kannst das Video an einem Tablet anschauen und steuern z.B. über Smartphone. Keine extra Hardware notwendig, aber möglich.
Denkbar ist auch ein Trägerfrequenzsystem mit Koaxkabel. Da kann z.B. die Fernsteuerung und eine 2,4GHz Kamera drauf liegen und, wenn man möchte, auch noch eine Versorgungsspannung. Mein Überland-ROV benutzt z.B. 5,7Ghz für die Fernsteuerung und 2,4Ghz WLAN für die Kamera.
Alexander schrieb: > Der Tauchroboter soll über vier Brushless-Motoren verfügen (auf-, > abtauchen, vor- und rückwärts; letztere dann auch zum Drehen). Motoren können im allgemeinen problemlos in beide Richtungen drehen, warum also zwei Motoren zum tauchen? Soll der Roboter auch Purzelbäume schlagen können? Alexander schrieb: > genügt ein Akku im Tauchgehäuse für alle Komponenten? Das kommt auf die Leistungsfähigkeit des Akkus an, auf den Leistungsbedarf Deiner Motoren, Beleuchtung, Kamera usw. und natürlich auf die angepeilte Einsatzdauer. Nachdem Akkus auch einiges an Platz brauchen und einiges an Masse haben (was zu noch deutlich mehr an Platzbedarf führt, wenn der Roboter schwimmfähig bleiben soll), solltest Du Dir darüber eher frühzeitig Gedanken machen. > Oder sollte ich lieber die Stromversorgung für den > Arduino von jener der Motoren trennen? Kannst Du, mußt Du aber nicht, denn wenn der eine Akku leer wird, ist die Restkapazität im anderen nutzlos; gegen Spannungseinbrüche beim Motorenanlauf helfen auch Abblockkondensatoren und eine eigene Spannungsregelung, weil Du für die Motoren ohnehin eine höhere Spannung brauchen wirst. Alexander schrieb: > Dieser soll über ein Cat.7-Kabel versorgt werden. Das ist sicher ein brauchbarer Ansatz, aber Du solltest da Netzwerk-Kabel am Besten auch dafür verwenden, wofür es gemacht ist und gar nicht erst versuchen analoge Poti-Signale über 60-100m Kabel zuverlässig übertragen zu wollen; das geht zwar grundsätzlich, ist aber bei so einer Länge schlicht Verschwendung. Allein über die 4 Adern die Du für die Joysticks reserviert hast kannst Du 100 MBit Ethernet fahren, was vermutlich neben allen Fernsteuerungs- und Telemetrie-Daten auch problemlos für die Videoübertragung reicht. Selbst für den Arduino gäbe es Ethernet-Adapter, aber auch ich würde Dir zu einem deutlich leistungsfähigeren Controller raten. Normales CAT7-Kabel würde ich aber eher nicht für eine Notrückholung verwenden; entweder Netzwerk-Kabel mit einer zusätzlichen Stahlseele drin, oder zusätzlich ein Seil für diesen Zweck vorsehen.
Alexander schrieb: >> Kabellänge? > > Um einigermaßen flexibel im Wasser unterwegs sein zu können, dachte ich > an eine Kabellänge zwischen 60 & 100m. Hoffentlich hast du ausreichend Motorleistung eingeplant, um das hinterher zu ziehen.
Angehängte Dateien:
-

schematische_Ansicht.png
44 KB
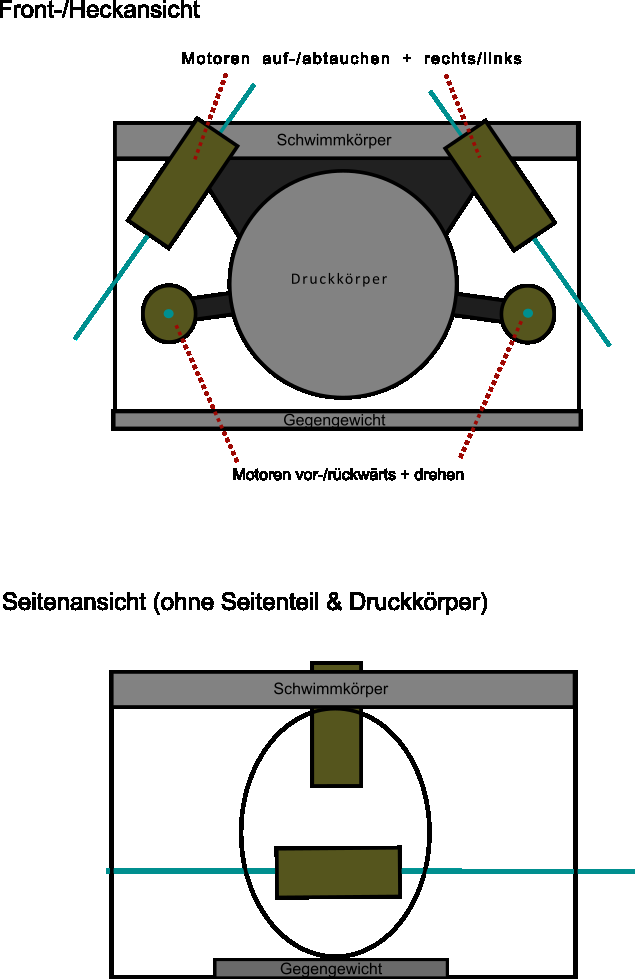
Michi S. schrieb: > Motoren können im allgemeinen problemlos in beide Richtungen drehen, > warum also zwei Motoren zum tauchen? Soll der Roboter auch Purzelbäume > schlagen können? Das stimmt, der Sinn dahinter ist, dass ich zwei schräg angebrachte Motoren für Auf- und Abtauchen verwenden möchte - steuere ich dann nur einen der Motoren an, so kann ich (zumindest nach meiner Planung) den ROV auch nach rechts und links bewegen zu können (ähnlich der Bewegung einer Drohne). Ich hab mal eine schnelle Skizze gemacht, vielleicht wird es damit deutlicher; in Blau ist der "Wasserstrahl" zu sehen. > Das kommt auf die Leistungsfähigkeit des Akkus an, auf den > Leistungsbedarf Deiner Motoren, Beleuchtung, Kamera usw. und natürlich > auf die angepeilte Einsatzdauer. Nachdem Akkus auch einiges an Platz > brauchen und einiges an Masse haben (was zu noch deutlich mehr an > Platzbedarf führt, wenn der Roboter schwimmfähig bleiben soll), solltest > Du Dir darüber eher frühzeitig Gedanken machen. Der gesamte ROV wird so aufgebaut, dass er oberhalb des Druckkörpers einen Schwimmkörper besitzt und unterhalb ein Gegengewicht, dass ich, sobald ich alle Teile final beisammen habe, so anpasse, dass der ROV möglichst exakt so schwer ist wie die verdrängte Wassermenge; das kann ich aber natürlich erst machen, wenn alles andere fertig ist. > weil Du für die Motoren ohnehin eine höhere Spannung brauchen wirst. Deswegen ist der Spannungswandler im Schaltplan eingezeichnet; für die "Trockenübung" an der heimischen Werkbank hat dies funktioniert (mit einem Motor), auch durch die 100m Cat.7-Kabel. Aber so, wie das klingt, werde ich wohl lieber auf einen kleineren Zusatzakku setzen, der den Arduino (oder eben RasPi) versorgt. > Das ist sicher ein brauchbarer Ansatz, aber Du solltest da > Netzwerk-Kabel am Besten auch dafür verwenden, wofür es gemacht ist und > gar nicht erst versuchen analoge Poti-Signale über 60-100m Kabel > zuverlässig übertragen zu wollen; das geht zwar grundsätzlich, ist aber > bei so einer Länge schlicht Verschwendung. Allein über die 4 Adern die > Du für die Joysticks reserviert hast kannst Du 100 MBit Ethernet fahren, > was vermutlich neben allen Fernsteuerungs- und Telemetrie-Daten auch > problemlos für die Videoübertragung reicht. Selbst für den Arduino gäbe > es Ethernet-Adapter, aber auch ich würde Dir zu einem deutlich > leistungsfähigeren Controller raten. Also empfiehlst du hier eher eine Netzwerklösung statt meiner (zugegebenermaßen simpel) gedachten Analog-Ansteuerung? Und: Wenn ich das richtig lese, wäre meine o.g. Lösung also möglich, aber schlichtweg "überdimensioniert"? > Normales CAT7-Kabel würde ich aber eher nicht für eine Notrückholung > verwenden; entweder Netzwerk-Kabel mit einer zusätzlichen Stahlseele > drin, oder zusätzlich ein Seil für diesen Zweck vorsehen. Keine Sorge, zur Rückholung ist es auch nicht gedacht, da dachte ich an ein zusätzliches Nylon-Seil, an welchem auch das Kabel befestigt wird. Da es mir bei meiner Frage aber um die Ansteuerung der Motoren und v.a. das Videosignal ging, habe ich nicht alle anderen (mechanischen) Komponenten mit aufgelistet. ;)
Rainer W. schrieb: > Hoffentlich hast du ausreichend Motorleistung eingeplant, um das > hinterher zu ziehen. Das Kabel bekommt ein Upgrade, damit es möglichst auftriebsneutral im Wasser ist. Für einen konkreten Motortyp habe ich mich noch nicht entschieden - für Vorschläge bin ich also offen. :)
Hallo Alexander, Lass Dir bitte von den Kollegen das Projekt nicht zerreden sondern bleib dran! Ein guter Start-punkt ist diese Seite: http://modelluboot.de/ Norbert ist die Referenz in DE. Sie dir mal den ROV Bausatz an. VG Andreas
Matthias S. schrieb: > Denkbar ist auch ein Trägerfrequenzsystem mit Koaxkabel. An so etwas hatte ich auch schon gedacht, den Gedanken dann aber wieder verworfen, weil ich Bedenken hatte, dass die auf diese Art verlängerten Zuleitungen zu den Antennen evtl. Probleme machen könnten; oder meinst du, dass ich zwei Koax-Kabel über 100m verlegen kann? Das wäre natürlich eine einfache Geschichte, ne Funke und Empfänger hätte ich da, dann müsste ich nur die Receiver-Antenne entsprechend neu anlöten...Aber kommt da dann noch was an?
Uboot- S. schrieb: > Hallo Alexander, > > Lass Dir bitte von den Kollegen das Projekt nicht zerreden sondern bleib > dran! Ein guter Start-punkt ist diese Seite: http://modelluboot.de/ > Norbert ist die Referenz in DE. Sie dir mal den ROV Bausatz an. > > VG > > Andreas Hallo Stocki, danke für die aufmunternden Worte, ich werde auf jeden Fall dranbleiben! :) Norbert Brüggens Homepage habe ich bereits gesehen (und mir dort auch die Inspiration für den Aufbau des ROV geholt).
Alexander schrieb: > Probleme machen könnten; oder meinst > du, dass ich zwei Koax-Kabel über 100m verlegen kann? Wieso zwei? Die Frequenzen kann man über ein Kabel übertragen. Die Herausforderung ist hier die Antennenweiche im Boot und auf der Bedienerseite. Übrigens solltest du unbedingt einen Ballasttank andenken, den du füllen und leeren kannst, denn der Auftrieb des ROV ändert sich auch mit den Wasserbedingungen. Ausschliesslich dynamisch tauchen und auftauchen geht nicht immer.
Angehängte Dateien:
-

Schema_Funksteuerung.png
85 KB
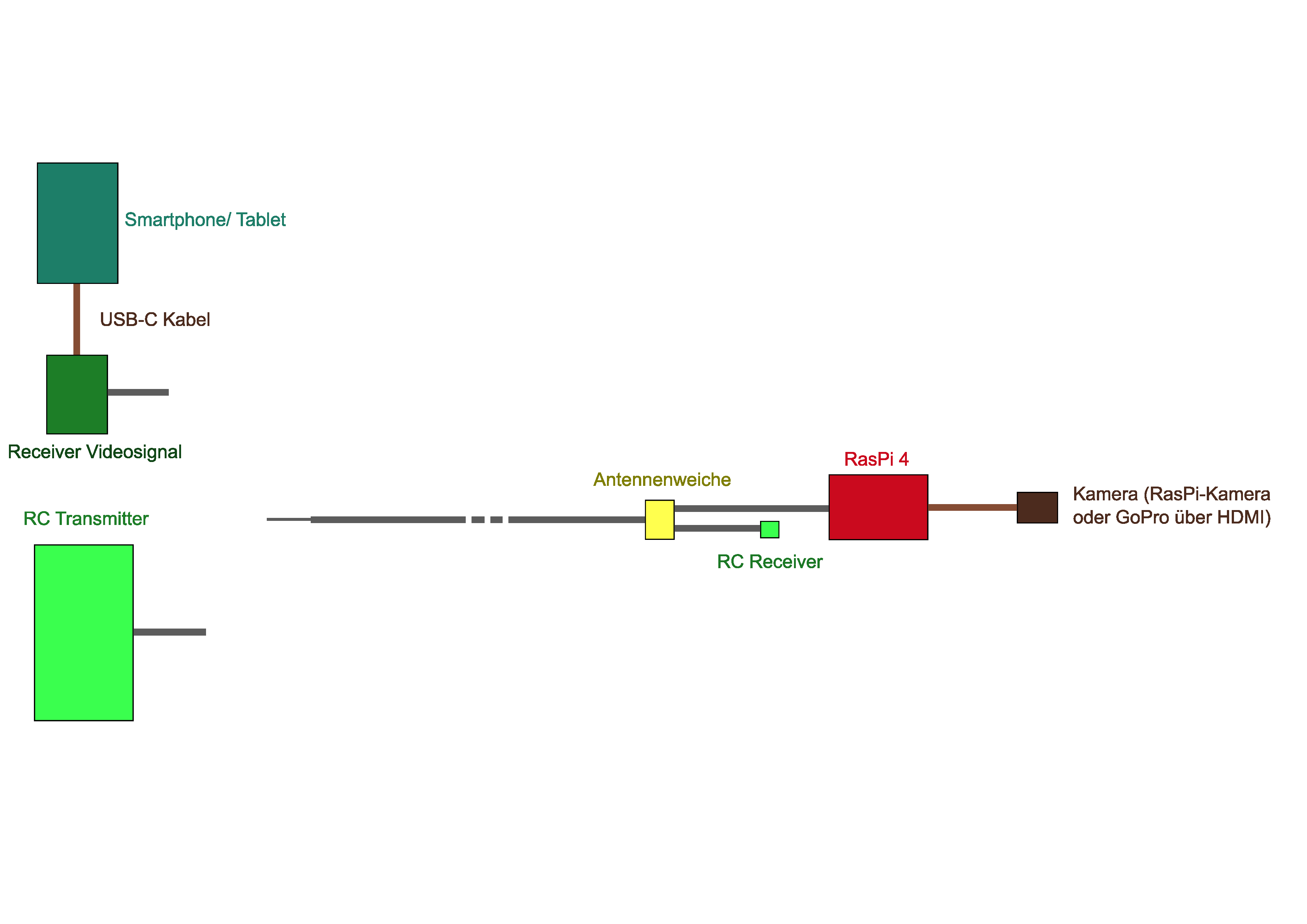
Matthias S. schrieb: > Wieso zwei? Die Frequenzen kann man über ein Kabel übertragen. Die > Herausforderung ist hier die Antennenweiche im Boot und auf der > Bedienerseite. Ah okay, mir nicht bewusst, dass sich das so "einfach" lösen lässt. Da ich überall nur von den Problemen der Übertragung über diese lange Strecke gelesen habe (v.a. wegen der Dämpfung), hatte ich das Thema Funkübertragung wieder bei Seite gelegt und bin gar nicht bis zur Möglichkeit der gemeinsamen Belegung eines Kabels vorgedrungen... (: Ich hab nochmal eine schnelle Skizze angefertigt; so habe ich das jetzt verstanden, stimmt das in etwa? Könntest du mir evtl. ein/zwei Eckdaten geben dazu, also bspw. welches Kabel u.ä.? > Übrigens solltest du unbedingt einen Ballasttank andenken, den du füllen > und leeren kannst, denn der Auftrieb des ROV ändert sich auch mit den > Wasserbedingungen. Ausschliesslich dynamisch tauchen und auftauchen geht > nicht immer. Eigentlich wollte ich beim dynamischen Tauchen bleiben, da ich 1.) nicht soo tief tauchen will und 2.) den vorhandenen Restauftrieb (welcher aber relativ gering sein sollte) als "Notfallrückholung" ansehen wollte, wenn wirklich alle Stricke reißen - im wahrsten Sinne des Wortes. ;)
Trimmtanks mit Ventilen? Gastanks mit Ventilen? Ein U-Boot kann nur dann ruhig im Wasser stehen wenn Eigengewicht und Verdrängung ausgeglichen sind. Dafür benötigt man immer Trimmtanks (verteilt im Bootskörper). Schon kleine Unterschiede in der Wassertemperatur (Schichtung) führen zu erheblichen Auf/Abtriebskräften Wasserdichte Leitung? Die Leitung muß nicht nur "wasserdicht" sein sondern auch "längswasserdicht". Sonst führen schon kleinste Verletzungen der Isolation zu einem Wandern des eindringenden Wassers in den Druckkörper, je nach Druckunterschied. Länge der Leitung? Du schreibst 60 bis 100 Meter. Bei nur wenigen Metern Tauchtiefe soll das Tauchgerät also 60 bis 100 Leitung am Boden hinterher ziehen? Kein Chance, außer du läßt die Leitung auf dem Wasser schwimmen und diese ist dann immer direkt über dem Tauchgerät.
Alexander schrieb: > Das stimmt, der Sinn dahinter ist, dass ich zwei schräg angebrachte > Motoren für Auf- und Abtauchen verwenden möchte - steuere ich dann nur > einen der Motoren an, so kann ich (zumindest nach meiner Planung) den > ROV auch nach rechts und links bewegen zu können (ähnlich der Bewegung > einer Drohne). Für eine Rechts-Links-Drehung lässt man normalerweise die Vortriebsmotoren gegensinnig oder, falls gleichzeitig auch Vortrieb erzeugt werden soll, mit unterschiedlicher Drehzahl laufen. Schräg montierte Vertikalmotoren machen die Sache nur kippelig oder Auftriebs- und Gewichtsschwerpunkt müssen übertrieben weit auseinander liegen. Alexander schrieb: > Das Kabel bekommt ein Upgrade, damit es möglichst auftriebsneutral im > Wasser ist. Mit Auftrieb hat das nichts zu tun. Es geht um den Schleppwiderstand bei Bewegung des Kabels gegenüber dem Wasser.
Alexander schrieb: > (v.a. wegen der Dämpfung) Die Dämpfung spielt hier nur eine untergeordnete Rolle, weil sie in jedem Fall geringer ist, als es die Übertragung durch Luft wäre. Du wirst vermutlich sogar die Pegel auf dem Kabel senken müssen, um Kreuzmodulation zu vermeiden. Fernsteuerung auf 5,7Ghz oder 40Mhz. Kamera auf 2,4Ghz. optional ein Netzwerk z.B. über Powerline. Alexander schrieb: > Könntest du mir evtl. ein/zwei Eckdaten > geben dazu, also bspw. welches Kabel u.ä.? Für mein U-Boot hatte ich das dünne RG174 angedacht, weil es leicht ist und nicht teuer. Allerdings habe ich zwar so ein Kabel schon durch Wasser verlegt, aber wenig Erfahrung mit Längsdichtigkeit gemacht.
Rainer W. schrieb: > Für eine Rechts-Links-Drehung lässt man normalerweise die > Vortriebsmotoren gegensinnig oder, falls gleichzeitig auch Vortrieb > erzeugt werden soll, mit unterschiedlicher Drehzahl laufen. Korrekt, aber mir geht es dabei nicht um die Drehung des ROV, sondern um die Bewegung nach rechts und links. Allerdings ist mir sehr wohl bewusst, dass das eine etwas komplizierte Angelegenheit wird, da ich eigentlich eine Art "Neigungswinkelkontrolle" bräuchte über einen Gyro-Sensor; aber es ist ja auch alles noch "Work-in-Progress". (: > Auftriebs- und Gewichtsschwerpunkt müssen übertrieben weit auseinander Ich weiß nicht, was "übertrieben weit" in diesem Zusammenhang bedeutet, aber bei der ROV-Konstruktion von Norbert Brüggen funktioniert das mit relativ kleinen Maßen, an welchen ich mich auch orientiert habe. > Mit Auftrieb hat das nichts zu tun. Es geht um den Schleppwiderstand bei > Bewegung des Kabels gegenüber dem Wasser. Wie gesagt, ist alles noch in Arbeit und daher flexibel in der Umsetzung - konstruktive Vorschläge für Motorentypen usw. sind also herzlich willkommen. (:
Alexander schrieb: > Allerdings ist mir sehr wohl bewusst, dass das eine etwas komplizierte > Angelegenheit wird, da ich eigentlich eine Art "Neigungswinkelkontrolle" > bräuchte über einen Gyro-Sensor; Die Neigung festzustellen, ist das Eine. Für eine reine Traversierbewegung müssten die Vertikalantriebe so montiert sein, dass bei gegenläufiger Drehrichtung kein Auftrieb und kein Kippmoment erzeugt wird. Sonst wird es schwierig, eine stabile Lage des ROV zu erreichen und Vertikal- und Querschub zu trennen. Eigentlich will man nicht, dass das ROV beim Traversieren wegkippt. Sonst brauch man wieder zusätzlich irgendetwas, um der Neigung entgegen zu wirken. Eine Möglichkeit wären natürlich eine Schubvektorsteuerung, d.h. ein Ruder, dass den von den/dem Vertikalantrieb erzeugten Schub auch in die Querrichtung umlenken kann. Das widerspräche aber dem Prinzip, alles durch Drehzahlregelung zu erledigen.
Angehängte Dateien:
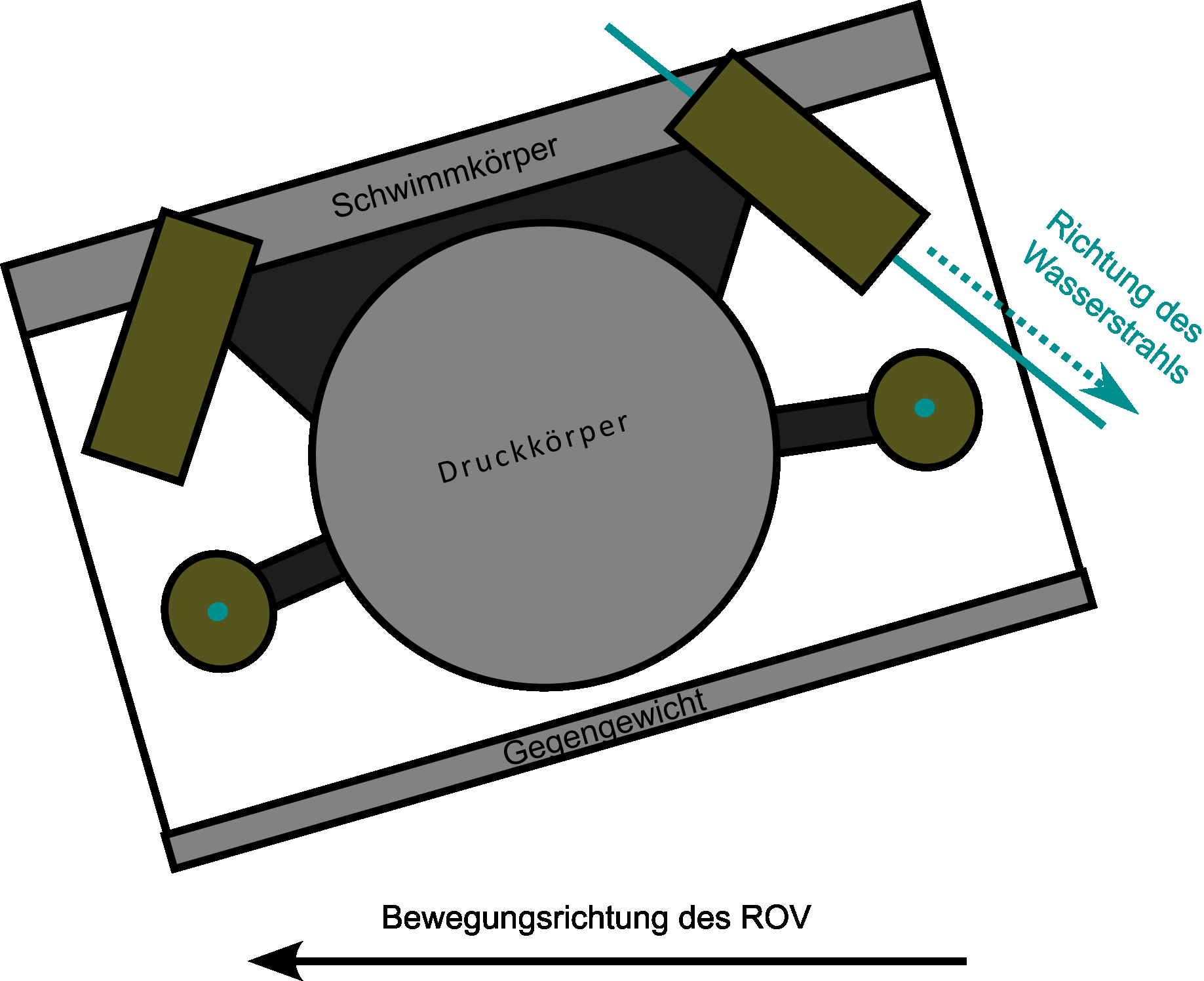
Rainer W. schrieb: > dass bei gegenläufiger Drehrichtung kein Auftrieb und > kein Kippmoment erzeugt wird Anbei nochmal eine kleine Skizze; ich dachte nicht an gegenläufige Drehrichtungen, sondern an die Ansteuerung nur eines Motors. Die Drehzahl dazu müsste dann allerdings mit Hilfe der Daten aus einem Gyro-Sensor geregelt werden (oder alternativ: sehr sehr langsame Drehzahl und "vorsichtige" manuelle Ansteuerung). Wenn der ROV dabei auch etwas auftaucht, stört mich das nicht, ich kann ihn ja anschließend wieder "regulär" abtauchen lassen. Ob diese Rechts-/Links-Bewegung überhaupt sinnvoll/ notwendig ist, sei ebenfalls dahingestellt - ich dachte, ich probiere es einfach mal aus. :)
Zwischen Transmitter und Arduino Mega fehlt eine GND Verbindung. > Dieser soll über ein Cat.7-Kabel versorgt werden. Bedenke den Innenwiderstand des Kabels. > Meine Idee dazu war, ein normales USB-Kabel (das ja zum > Anschließen an den Laptop genutzt werden kann) zu zerlegen und die > einzelnen Adern "separat" zu nutzen Ich habe den Eindruck, dass du noch einiges über Leitungen lernen musst. Fange mit dem Wellenwiderstand an. > wie kann ich die GoPro an den Arduino anschließen, um mir > die Videosignale an meine Fernbedienung und somit an einen > externen Bildschirm übertragen zu lassen? Gar nicht, dafür ist der kleine 8 Bit Mikrocontroller in jeglicher Hinsicht ungeeignet. Generell ist das nicht der Anwendungsbereich von klassischen Mikrocontrollern. > Ich könnte mir vorstellen, dass, sobald ich die Motoren ansteuere, > ein Spannungsabfall entsteht und somit der > Arduino nicht mehr mit ausreichend Spannung versorgt Wenn dein Akku unter Last signifikant einbricht, ist er zu schwach dimensioniert. Ein zweiter Akku verbirgt nur die eigentliche Problemstelle, was für eine Promotion hoffentlich völlig inakzeptabel ist. > da dachte ich an ein zusätzliches Nylon-Seil, an > welchem auch das Kabel befestigt wird. Du weißt Schon, dass Nylon im Vergleich zu Kupfer wie ein Gummiband ist? Was du dir da vorgenommen hast, enthält noch viele Unbekannte mit hoher Komplexität. Falls du dafür nicht mehrere Jahre eingeplant hast, würde ich mir rasch etwas völlig anderes überlegen. Falls du die Zeit hast: mach es! Du wirst dabei eine Menge nützliches lernen.
Steve van de Grens schrieb: > Problemstelle, was für eine Promotion hoffentlich völlig inakzeptabel > ist. > > Was du dir da vorgenommen hast, enthält noch viele Unbekannte mit hoher > Komplexität. Falls du dafür nicht mehrere Jahre eingeplant hast, würde > ich mir rasch etwas völlig anderes überlegen. Da ich nicht in der Elektrotechnik oder einem ähnlichen Feld promoviere (sondern, wie in meinem Ausgangspost erwähnt, archäologisch-historische Untersuchungen durchführe), sehe ich da jetzt kein Problem. ;)
Alexander schrieb: > Da ich nicht in der Elektrotechnik oder einem ähnlichen Feld promoviere > (sondern, wie in meinem Ausgangspost erwähnt, archäologisch-historische > Untersuchungen durchführe), sehe ich da jetzt kein Problem. ;) Dafür hast du dir aber erstaunlich viel Elektrotechnik angetan. Programmieren wird sich das Ding auch nicht von alleine.
Matthias S. schrieb: > Die Dämpfung spielt hier nur eine untergeordnete Rolle, weil sie in > jedem Fall geringer ist, als es die Übertragung durch Luft wäre. Du > wirst vermutlich sogar die Pegel auf dem Kabel senken müssen, um > Kreuzmodulation zu vermeiden. Das sind gute Nachrichten. :) > Fernsteuerung auf 5,7Ghz oder 40Mhz. > Kamera auf 2,4Ghz. > optional ein Netzwerk z.B. über Powerline. Sender und Empfänger auf 2,4 Ghz hätte ich hier; könnte ich also auch die Video-Übertragung auf eine andere Frequenz legen? Wenn ich das richtig sehe, gibt es ja bspw. von Radiolink auch Sender/Empfänger-Kombis zur FPV-Übertragung, welche auf 5,8 Ghz laufen. Und nochmal eine (vermutlich) ganz simpel zu beantwortende Frage: Benötige ich die Antennenweiche auf beiden Seiten des Kabels? > Für mein U-Boot hatte ich das dünne RG174 angedacht, weil es leicht ist > und nicht teuer. Allerdings habe ich zwar so ein Kabel schon durch > Wasser verlegt, aber wenig Erfahrung mit Längsdichtigkeit gemacht. Okay, cool, das hatte ich "damals" auch ins Auge gefasst - dann werde ich es wohl einfach auf einen Versuch ankommen lassen. ;)
Steve van de Grens schrieb: > Dafür hast du dir aber erstaunlich viel Elektrotechnik angetan. > Programmieren wird sich das Ding auch nicht von alleine. Ich sehe das Ganze auch eher als Hobby an; der ROV ist selbstverständlich kein Muss für die Dissertation, wäre aber ein schickes "Nice-to-have". Falls es nicht im Rahmen der Diss klappt, macht das aber nix, ich beschäftige mich gerne damit und dementsprechend kann das auch ein längerer Prozess werden.
Alexander schrieb: > Sender und Empfänger auf 2,4 Ghz hätte ich hier; könnte ich also auch > die Video-Übertragung auf eine andere Frequenz legen? Wenn ich das > richtig sehe, gibt es ja bspw. von Radiolink auch > Sender/Empfänger-Kombis zur FPV-Übertragung, welche auf 5,8 Ghz laufen. Sender/Empfänger hört sich nach Funk an. Unterwasser und 2,4 bzw. 5,8 GHz passt nicht so wirklich zusammen. In der Mikrowelle in der Küche hast du eine Eindringtiefe von wenigen Zentimetern.
Alexander schrieb: > Sender und Empfänger auf 2,4 Ghz hätte ich hier... > (andere) welche auf 5,8 Ghz laufen. Ich bezweifle, dass 100 Meter Netzwerkkabel für solche Frequenzen auch nur ansatzweise geeignet sind. Geplant sind sie für maximal 600 MHz. RG174 Kabel sind ganz anders aufgebaut und haben keine 8 Adern. Damit müsstest du dein Konzept zur Stromversorgung und Fernbedienung erneuern.
Angehängte Dateien:
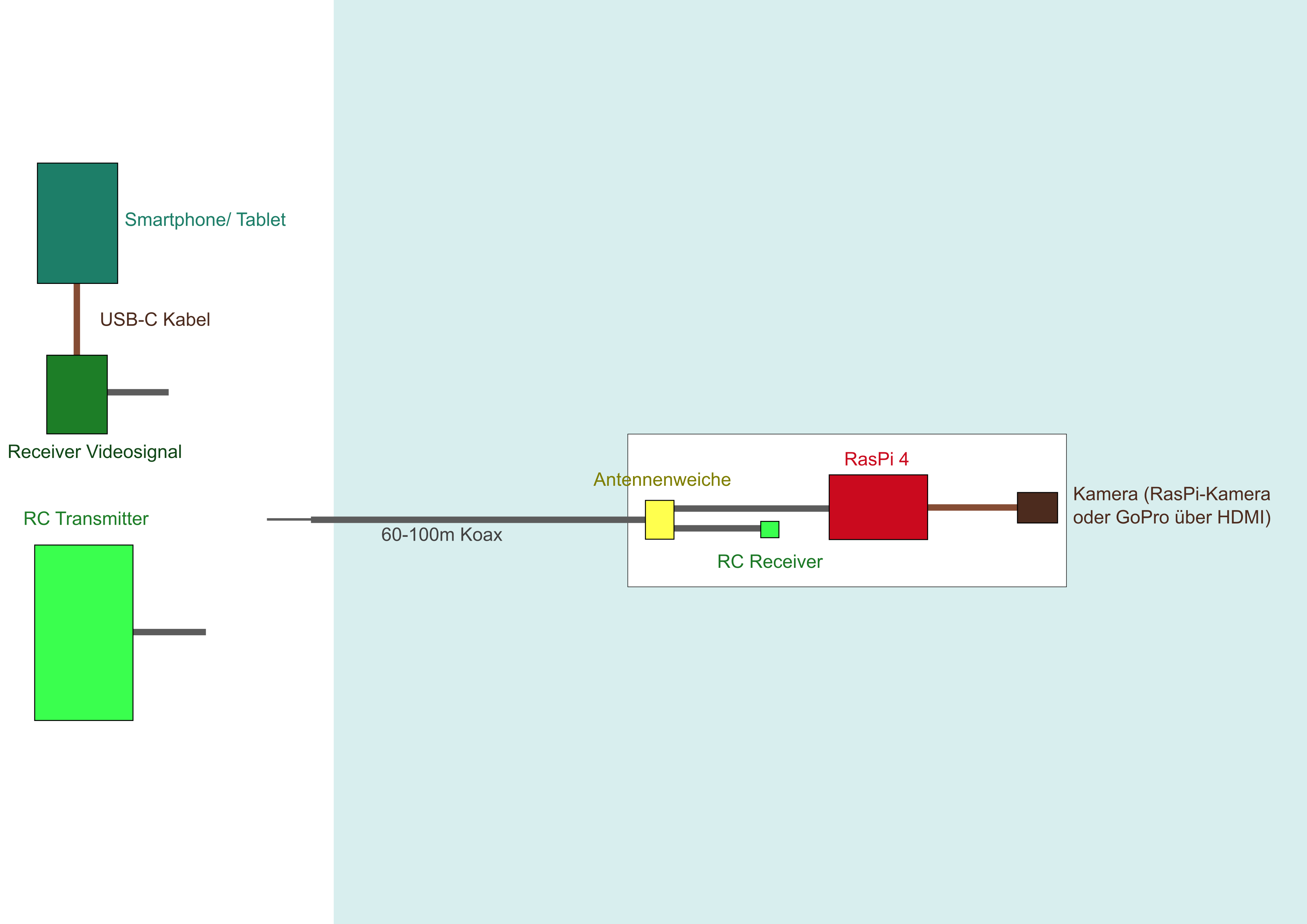
Rainer W. schrieb: > Unterwasser und 2,4 bzw. 5,8 GHz passt nicht so wirklich zusammen. Daher ja die Kabelgebundene Übertragung vom ROV bis an Land und anschließend die Funkverbindung zum Bildschirm bzw. zur Fernbedienung. Anbei nochmal verdeutlicht, was im Wasser sein soll.
Steve van de Grens schrieb: > Ich bezweifle, dass 100 Meter Netzwerkkabel für solche Frequenzen auch > nur ansatzweise geeignet sind. Geplant sind sie für maximal 600 MHz. > > RG174 Kabel sind ganz anders aufgebaut und haben keine 8 Adern. Damit > müsstest du dein Konzept zur Stromversorgung und Fernbedienung erneuern. Jetzt geht es hier gerade ein wenig durcheinander. Also nochmal zur Verdeutlichung: 1. Die Umsetzung über Netzwerkkabel war für eine analoge Steuerung des ROV gedacht. Dies war mein ursprünglicher Beitrag. Anschließend kam 2. Die Steuerung mit Sender/Empfänger über Koax-Kabel als Alternativ-Vorschlag ins Gespräch. Dies wäre eine (vermutlich einfacher zu realisierende) Alternative zu 1. Ich persönlich denke inzwischen, dass mir die zweite Option besser gefällt bzw. "unkomplizierter" umzusetzen ist. Eine 2.4 Ghz Sender/Empfänger-Kombi habe ich hier, jene für die Videoübertragung müsste ich noch besorgen.
Alexander schrieb: > Ich persönlich denke inzwischen, dass mir die zweite Option besser > gefällt bzw. "unkomplizierter" umzusetzen ist. Eine 2.4 Ghz > Sender/Empfänger-Kombi habe ich hier, jene für die Videoübertragung > müsste ich noch besorgen. Und die sinnvollste Lösung, also alles über Netzwerk hast du einfach mal ausgeschlossen, weil?
Netzwerktechnik und für die lange Strecke ein Glasfaserkabel. Günstig und leicht. Dann gibt es auch keinerlei Bandbreitenprobleme :-))
Cyblord -. schrieb: > Und die sinnvollste Lösung, also alles über Netzwerk hast du einfach mal > ausgeschlossen, weil? Ausgeschlossen habe ich noch gar nichts - aber für eine Netzwerklösung muss ich mich erstmal damit auseinandersetzen, wie ich das am besten umsetzen kann, da ich "nicht wirklich fit" bin. (:
Thomas R. schrieb: > Netzwerktechnik und für die lange Strecke ein Glasfaserkabel. Günstig > und leicht. Dann gibt es auch keinerlei Bandbreitenprobleme :-)) Ich werde mich mit der Idee einer Netzwerklösung auseinandersetzen - da ich aber, wie gesagt, bisher keine wirkliche Ahnung vom Aufbau eines lokalen Netzwerkes habe, muss ich mich erstmal etwas grundlegender dazu informieren... (:
Man kann das natürlich mit Powerline lösen. Dann ist ein langes leichtes Kabel kein Problem, das haben wir ja oft genug hier demonstriert: Beitrag "Ethernet über 2adrige Telefonleitung. Idee: Billige Powerline Adapter für z.B. 24V umbauen. Mögli" Dabei habe ich z.B. 100MBit/s über 3mm Alarmanlagenkabel bei 90m Länge übertragen - mit alten Devolo PL Adaptern. Klar ist die Speisung eines ROV über so dünnes Kabel nicht sinnvoll, aber das PL Prinzip erlaubt natürlich eine Speisung, wenn man das Kabel etwas dicker wählt.
Es gibt viele kommerzielle ROV, die machen alles ueber ein RG58 Kabel mit vielleicht 6mm durchmesser. Die Steuerbefehle und Sensorsignale kann man per UART erzeugen, die Kamera bringt ein Videosignal in VGA Qualitaet und vielleicht 15MHz Bandbreite. Das RG58 kann diese Signale in beide Richtungen transportieren und bietet fuer die Versorgung eine Spannungsfestigkeit von 1000V oder so. Fuer mehr Leistung waere ein RG213 denkbar. Das waere ein Stueck steifer, kann aber mehrere kV und ein Vielfaches an Strom transportieren. Allerdings waren das ROV fuer das tiefe Wasser, ohne das Kabel ueber den Grund zu zerren. Ich denke die Mechanik ist schon aufwendig genug. Mach mal irgend welche Wellen wasserdicht. Nein, O-Ringe reichen nicht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.