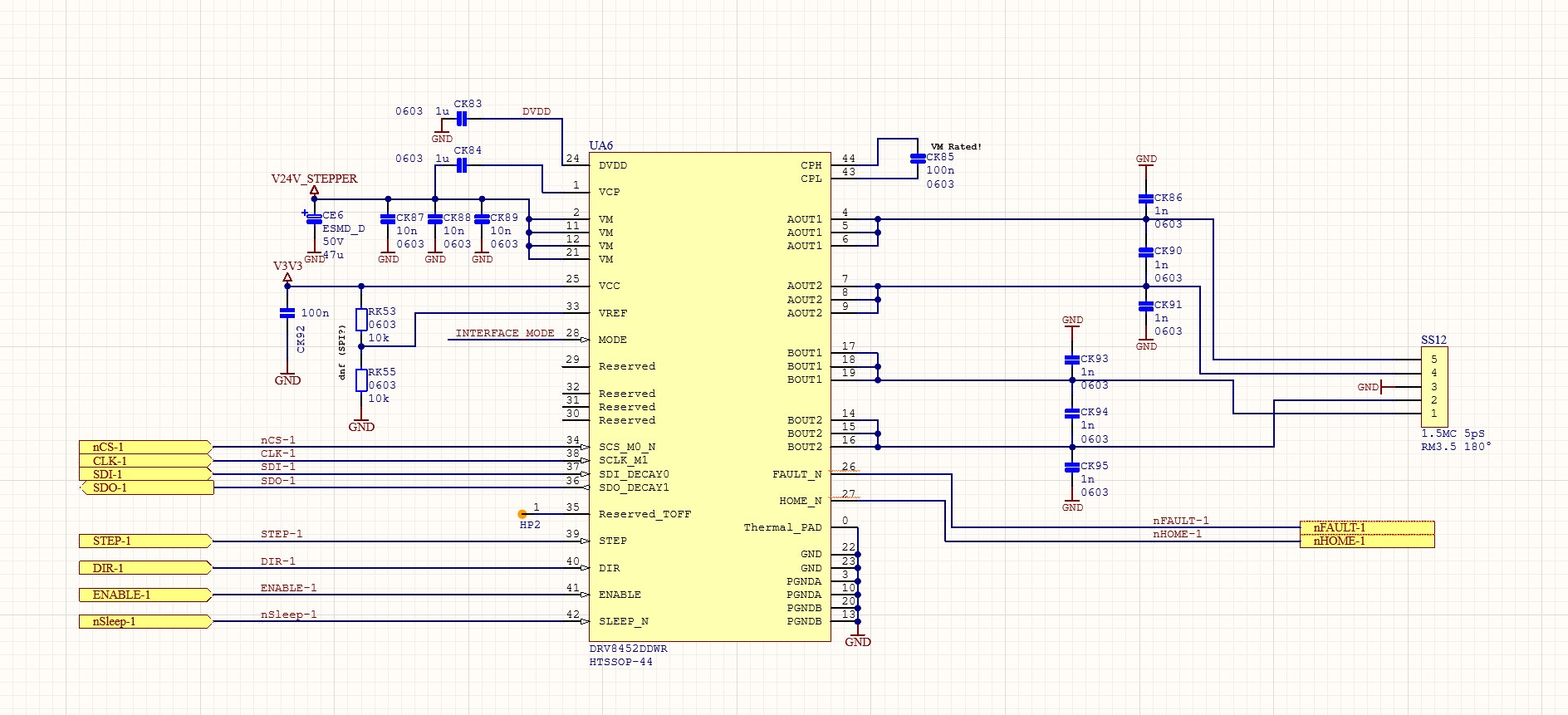
Hallo, meine erste Schrittmotorsteuerung und die erste Verwunderung. Haben einen openLoop unbelasteten NEMA23 Motor (Länge 87mm) mit 3.4A 1.8Nm und 1.8 Grad pro Schritt. Habe ein Board mit DRV8452 und 24V Versorgung und möchte ihn von 120rpm auf 300rpm hochfahren. Fahre es im Moment im Vollschritt mit 1kHz PWM = 120rpm und ich habe erstmal versucht mittels debugger zu beschleunigen das geht gleich einmal schief. Mit einer sehr langsamem Rampe schaffe ich es auf 135 rpm aber dann bleibt er immer stehen. Sehr langsam heißt alle Sekunde 1 rpm, muss ich das noch langsamer machen oder die Auflösung meiner PWM erhöhen. Ist ja im Moment eigentlich recht langsam. Danke
Max M. schrieb: > Zu wenig Strom! Oder auch zu viel ;-) Macht der Motor denn ordentlich Krach? Kannst Du auf 1/4 oder 1/8 Schritt umstellen? Dann sind die Resonanzen/Vibrationen geringer.
Mi N. schrieb: >> Zu wenig Strom! > > Oder auch zu viel ;-) Mnn? So'n MEMA 23 hat schon ein gewisses Rastmoment.
Weglaufen tut er erstmal. Nur gefühlt reagiert er sehr empfindlich auf Frequenzänderung. Der full scale current ist auf 3.5 A Max M. schrieb: > Mnn? > So'n MEMA 23 hat schon ein gewisses Rastmoment Stimmt, kann ihn nicht mit der Hand drehen. Mi N. schrieb: > Kannst Du auf 1/4 oder 1/8 Schritt umstellen? Dann sind die > Resonanzen/Vibrationen geringer. Kann ich mal probieren Max M. schrieb: > Zu wenig Strom! Hab am auch ein 6A Labor Netzgerät dran. Strombegrenzung höre ich nicht..
Reinhard schrieb: > Hallo, > meine erste Schrittmotorsteuerung und die erste Verwunderung Du siehst also, dass rs selbst bei primitiv erscheinenden Aufgaben eine Menge zu lernen gibt. Rampen mit Vollschritt gehen normalerweise schief weilan in Resonanzpunkte kommt. Man muss geschickt zwischen Vollschritt und Halbschritt umschalten um die zu vermeiden. Aber selbst im Mikroschritt sind unbelastete Wellen leicht aus dem Tritt zu bekommen. Man braucht Dämpfung. Welle zwischen den Fingern bremsen oder eben eine Last dran dazu Gummidampener. Und dann ist zu beachten fass ein Schrittmotor mit steigender Drehzahl auf Grund der Induktivität der Spulenwicklungen an Kraft verliert, was man mit Stromregelung an drastisch höherer Betriebsspannung zu kompensieren versucht. https://dse-faq.elektronik-kompendium.de/dse-faq.htm#F.10
Reinhard schrieb: > ein 6A Labor Netzgerät Mit welcher Spannung? Um gegen die mitsteigender Drehzahl zunemende Induktivität genügend Strom zu treiben braucht mann einfach auch genug Spannung
erhöhung um gleich 1rpm ist schon ein sprung. lass deine PWM mal eine schöne rampe berechnen und schau, dass die auch sauber sprungfrei ausgegeben wird.
Max M. schrieb: > Reinhard schrieb: >> ein 6A Labor Netzgerät > > Mit welcher Spannung? > Oben steht ja 24V - viel interessanter wäre mal die Nennspannung des Motors.
Flip B. schrieb: > erhöhung um gleich 1rpm Gibt es da wo kennlinien? Harald A. schrieb: > Oben steht ja 24V - viel interessanter wäre mal die Nennspannung des > Motors 4,2v hat der Motor Nennspannung. Rms gemessen habe ich noch nicht.
Harald A. schrieb: > viel interessanter wäre mal die Nennspannung des > Motors. Nein. Die ist recht egal. Vermutlich irgendwas zwischen 2 und 5 Volt. In Ruhe. Der Strom macht hier die Nusik
Reinhard schrieb: > openLoop unbelasteten Das ist das Problem. Versuche, den mal zu belasten. Ungedaempft laufen Stepper nicht ordentlich. Dann auch schauen, wo die Resonanz liegt (in einer realen Situation). Dieser Bereich sollte moeglichst schnell durchfahren werden.
So ein Schrittmotor braucht im Grunde eine Schwungmasse, sonst "ueberholt" er das Drehfeld und bekommt kurzzeitig eine Kraft in die falsche Richtung. Wenn man in dem Moment dann auf den naechsten Schritt schaellt, hat man verloren. Eigentlich erstaunlich, dass das nicht in jeder Schrittmotoranleitung steht.
Arduino F. schrieb: > Harald A. schrieb: >> viel interessanter wäre mal die Nennspannung des >> Motors. > > Nein. > Die ist recht egal. So ein Unsinn. An einem Motor mit 12V Nennspannung bei 12V Betriebsspannung hast du mit Sicherheit keine Freude, falls der Motor sich mit nennenswerter Drehzahl bewegen soll. > Der Strom macht hier die Nusik Genau das - wenn die Betriebsspannung nicht ausreichend hoch gegenüber der Nennspannung ist, wird die Zeit, über die auf jedem Schritt der volle Strom fließt, mit zunehmender Drehzahl immer kleiner und das Drehmoment bricht schon bei geringer Drehzahl auf unbrauchbare Werte zusammen. Bei zu viel Strom und unreichender Last können Resonanzen zu stark angeregt werden, so dass der zulässige Lastwinkel kurzzeitig überschritten wird und der Motor dadurch stehenbleiben kann (und dann fürchterlich rappelte).
Rainer W. schrieb: > So ein Unsinn. An einem Motor mit 12V Nennspannung bei 12V > Betriebsspannung hast du mit Sicherheit keine Freude, falls der Motor > sich mit nennenswerter Drehzahl bewegen soll. Selber Unsinn... Ein klein wenig Erfahrung mit Schrittmotoren würde dir sagen, dass ein Nema23 welcher mit 3.4A angegeben ist, ganz sicher kein 12V Motor sein kann. Dessen Wicklung an 12V gehalten, schäumt nach wenigen Minuten/Sekunden auf. Zudem ist die Betriebsspannung nicht bei allen Motoren angegeben. Widerstand und Strom, sind die nötigen Angaben. Die Spannung stellt sich automatisch ein, durch die Stromregelung. Reinhard schrieb: > 3.4A Natürlich kann es "besser" sein, auch bei diesem Motor auf 24V oder 36V zu gehen. Als Reserve, für hohe Drehzahlen unter Last. Der TO hat hier allerdings keine Last dran, braucht also nur wenig Drehmoment.
Thorsten M. schrieb: > So ein Schrittmotor braucht im Grunde eine Schwungmasse, sonst > "ueberholt" er das Drehfeld und bekommt kurzzeitig eine Kraft in die > falsche Richtung Genau das ist der Grund warum ein Stepper eben keine Schwungmasse, sondern Dämpfung (sprich Last) braucht. Eine Schwungmasse bewirkt genau deinen beschriebenen Effekt.
Rainer W. schrieb: > So ein Unsinn. An einem Motor mit 12V Nennspannung bei 12V > Betriebsspannung Gerade nochmal nachgesehen... Die 12V gibts nur in deiner Fantasie! 24V stehen im Eingangsposting.
Hallo Reinhard, Reinhard schrieb: > möchte ihn von 120rpm auf 300rpm hochfahren. Fahre es im Moment im > Vollschritt mit 1kHz PWM = 120rpm und ich habe erstmal versucht mittels > debugger zu beschleunigen das geht gleich einmal schief. Mit einer sehr > langsamem Rampe schaffe ich es auf 135 rpm aber dann bleibt er immer > stehen. Sehr langsam heißt alle Sekunde 1 rpm, muss ich das noch > langsamer machen oder die Auflösung meiner PWM erhöhen. Ist ja im Moment > eigentlich recht langsam. Die verwendete Beschleunigung ist nicht das Problem, sondern das deine Rampe die Geschwindigkeit in diskreten, möglicherweise zu großen Schritten ändert. Du startest mit 120U/min also 2U/s bzw. 400Hz und erhöhst dann jede Sekunde um 3,3Hz. Für die Rampe musst du die Frequenz von Schritt zu Schritt erhöhen. Es gibt von Atmel einge gute Applikation-Note für die AVRs zu dem Thema. Warum Vollschritt ungünstig ist, ist ja bereits erklärt worden. Debugger könnte aber auch bedeuten, dass dein Timing zu viel Jitter hat. Wie erzeugst du das Takt-Signal? Per Timer oder per Bitbang-I/O mit Wartezeiten? Mit freundlichen Grüßen Thorsten Ostermann
Mi N. schrieb: > Macht der Motor denn ordentlich Krach? Dazu fehlt mir noch eine Antwort. Resonanzen kann man nämlich deutlich hören. Andreas B. schrieb: > Genau das ist der Grund warum ein Stepper eben keine Schwungmasse, > sondern Dämpfung (sprich Last) braucht. Zunächst braucht der Motor eine 'Schwingmasse', die ihn darin hindert, auf dem Tisch herumzutanzen. Entweder fest einbauen oder zumindest in einen Schraubstock einspannen. Thorsten O. schrieb: > Die verwendete Beschleunigung ist nicht das Problem, sondern das deine > Rampe die Geschwindigkeit in diskreten, möglicherweise zu großen > Schritten ändert. Mit einer kleinen Testschaltung (ATtiny25) kann man die Schrittfrequenz sehr fein verändern: http://mino-elektronik.de/Generator/takte_impulse.htm#bsp6 Die Eingangsspannung vom Poti wird stark gefiltert, sodaß auch bei ruckartigem Verdrehen eine Rampe erzeugt wird. Eine Alternative wäre ein analoger Funktionsgenerator. Die DDS-Teile liefern bei Änderungen keine stabile Ausgangsfrequenz.
Arduino F. schrieb: > Zudem ist die Betriebsspannung nicht bei allen Motoren angegeben. > Widerstand und Strom, sind die nötigen Angaben. Der erfahrene Elektroniker weiß sich da mit dem Ohmschen Gesetz zu helfen. So leitet sich die Nennspannung ab, da das der Wert für Betrieb der Wicklung ohne Stromregelung und ohne Gegen-EMK ist.
Da über die Erzeugnung der Rampe nichts geschrieben wurde: Zuviel Jitter kann auch die mögliche Beschleunigung/obere Drehzahl massiv absenken.
Rainer W. schrieb: > Der erfahrene Elektroniker weiß sich da mit dem Ohmschen Gesetz zu > helfen. So leitet sich die Nennspannung ab, da das der Wert für Betrieb > der Wicklung ohne Stromregelung und ohne Gegen-EMK ist. Wenn du wenigstens gelesen hättest um was es geht bevor du dein Geschwätz absonderst: Er hat einen Treiber mit Stromregelung
Mi N. schrieb: > Andreas B. schrieb: >> Genau das ist der Grund warum ein Stepper eben keine Schwungmasse, >> sondern Dämpfung (sprich Last) braucht. > > Zunächst braucht der Motor eine 'Schwingmasse', die ihn darin hindert, > auf dem Tisch herumzutanzen. Entweder fest einbauen oder zumindest in > einen Schraubstock einspannen. Für Tests ohne Last auf dem Labortisch nutze ich ein Stück Moosgummi als Unterlage. Das verhindert, dass sich der Motor selbst vom Tisch runtervibriert. Mit freundlichen Grüßen Thorsten Ostermann
Michael B. schrieb: > Wenn du wenigstens gelesen hättest um was es geht bevor du dein > Geschwätz absonderst: > Er hat einen Treiber mit Stromregelung Arduino F. klagte über die oft fehlende Angaben der Nennspannung. Wenn du bitte die Güte hättest, dich mit deinem Kommentar zu einem ganz anderen Aspekt heraus zu halten.
Rainer W. schrieb: > Arduino F. klagte über die oft fehlende Angaben der Nennspannung. Nein: Keine Klage. Weil ich weiß, dass die Angabe unnötig ist, nicht zielführend. Der einzige, der die Spannung sehen will bist du. Rainer W. schrieb: > Wenn du bitte die Güte hättest, dich mit deinem Kommentar zu einem ganz > anderen Aspekt heraus zu halten. Ich glaube nicht, dass du hier zu bestimmen hast, wer was zu sagen hat. Alleine der Versuch zeigt schön, auf welchem dünnen Brett du unterwegs bist.
Angehängte Dateien:
-

st6018l3008.jpg
230 KB -

stepper.jpg
330 KB
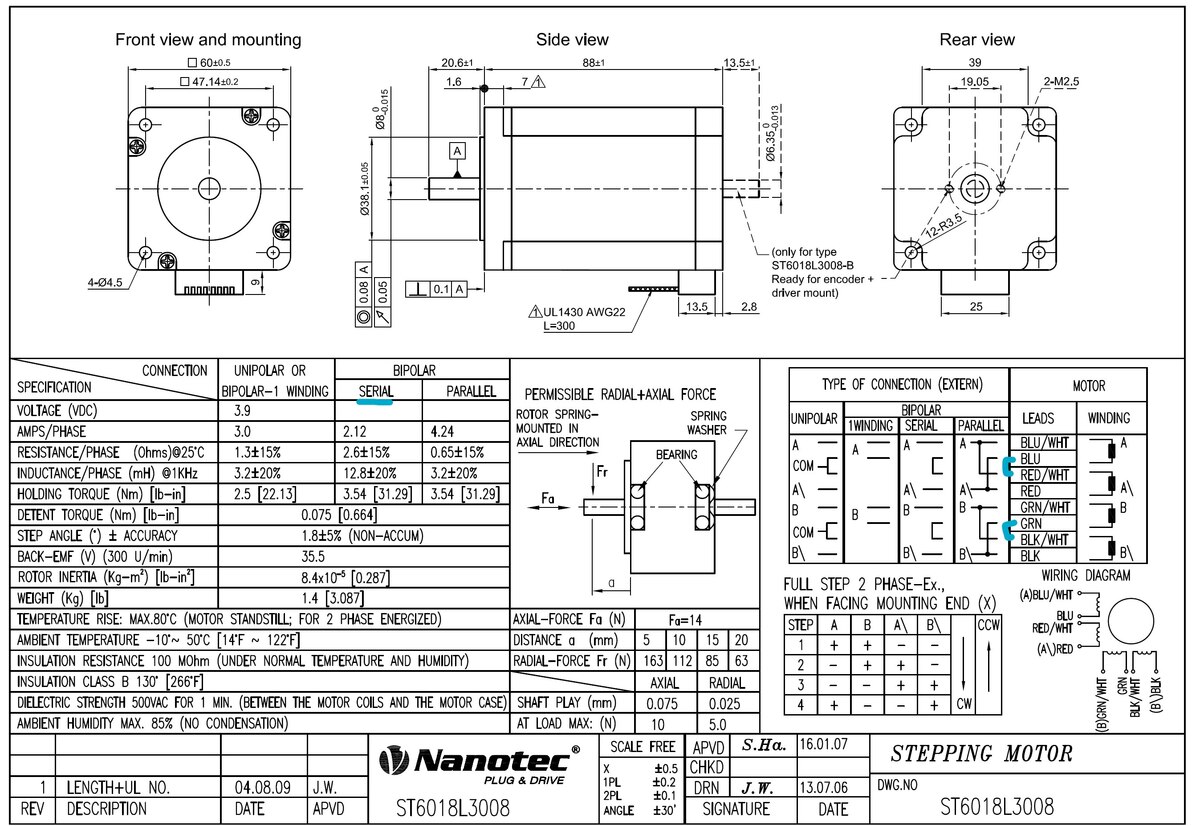
Danke erstmal für die Kommentare. Habe nun endlich ein Datenblatt bekommen. Der Strom war wohl etwas zu hoch. Habe ich runtergestellt aber es gibt keine Änderung. Anschluss habe ich auch noch einmal kontrolliert und ohmsch habe ich jeweils 3.1R. Wenn ich ihn mit dem Finger bremsen versuche ändert sich beinahe nichts oder er bleibt stehen. Scheint auch wohl so, dass er zwar mit 2 rpm losfährt (zwar auch nicht immer) aber dann auch nach ein paar Sekunden ohne PWM Änderung stehen bleibt. Das ist mir bis jetzt nicht aufgefallen. Das der Motor sich nicht mit der Hand drehen lässt ist bei der Größe so? Die 3.54Nm müsste ich ja leicht drehen können?! Thorsten O. schrieb: > Für Tests ohne Last auf dem Labortisch nutze ich ein Stück Moosgummi als > Unterlage. Ja das habe ich schon auch in Verwendung. Mi N. schrieb: > Macht der Motor denn ordentlich Krach? Da fehlt mir etwas die Erfahrung. Wenn er nicht anläuft dann ist ein Surren hörbär, je nach rpm Vorgabe unterschiedlich. Im Betrieb wenn er außer Tritt kommt hört es sich so an als würde man eine Pfeffermühle mit kleinen Steinen bestücken würde. Thorsten O. schrieb: > Wie erzeugst du das Takt-Signal? Kommt aus einer Hardware Timer unit sollte zumindest bei konstanter Vorgabe sehr genau sein. Andreas B. schrieb: > Genau das ist der Grund warum ein Stepper eben keine Schwungmasse, > sondern Dämpfung (sprich Last) braucht. Das ist ein kleines Problem hab im Moment nur den Motor, Finger ist wohl zu stark oder zu schwach. Umstellen auf 1/4 Schritt verändert nichts.
Moin, vor einiger Zeit habe ich einen Treiber mit Rampe gebaut, der einfach zu bedienen ist. Vielleicht ist das was für Dich, wenn Du noch einen 1284P rumliegen hast. Der hat eine einstellbare Rampe und kann 2 Motore bedienen. Beitrag "Re: Zeigt her eure Kunstwerke (2021)" Ich bastel seit einiger Zeit an einer Steuerung für 5-Phasen Schrittmotore. Die betreibe ich mit Konstantstrom. Mit einem Poti oder über die seriellen Schnittstelle lässt sich die Geschwindigkeit oder die Position einstellen. Ich nutze Toshiba Treiber für die 2-Phasen Motore. Das funktioniert mit Lenze Motoren auch recht gut. Größere Motore drehen sich zwar damit, aber etwas Leistung oder Geschwindigkeit ist nicht möglich, obwohl der eingestellte Strom ausreicht. Deshalb werde ich irgendwann die SW für diesen Motor erweitern. Hier das Menü über die Schnittstelle. Bereit ? - Info P - laufe auf Position S - Schrittweite 1-256 V - Vorteiler Taktgeber 1..5 A - Position auf 0 setzen W - Laufe auf Winkel x,x B - Betriebsart Motor 1..3 G - Geschwindigkeit Motor 1..65535 Z - Zeit abwarten -Abbruch mit x- Aktuelle Position: + 0 Winkel: 0,0 Grad Umdrehungen: 0 Wenn ich sehe, wie ruhig und schnell sich der Motor dreht, hätte ich Lust, die in meinen X-Z Tisch einzubauen. Gruß Carsten
Hallo Reinhard, Reinhard schrieb: > Wenn ich ihn mit dem Finger bremsen versuche ändert sich beinahe nichts > oder er bleibt stehen. Scheint auch wohl so, dass er zwar mit 2 rpm > losfährt (zwar auch nicht immer) aber dann auch nach ein paar Sekunden > ohne PWM Änderung stehen bleibt. Dann stimmt etwas grundsätzlich mit deinem Treiber nicht. 2 rpm sind 2U/min, meinst du vielleicht 2 U/s? Auch das sollte ohne Rampe noch möglich sein wenn die Ansteuerung stimmt. > Das ist mir bis jetzt nicht > aufgefallen. Das der Motor sich nicht mit der Hand drehen lässt ist bei > der Größe so? Die 3.54Nm müsste ich ja leicht drehen können?! Wie? Mit den Fingern an der nackten Welle? Niemals. Du hast offensichtlich keine Vorstellung von Drehmoment. Mit einem entsprechenden Hebelarm fixiert an der Welle geht das natürlich. Mit freundlichen Grüßen Thorsten Ostermann
Reinhard schrieb: > Das der Motor sich nicht mit der Hand drehen lässt ist bei der Größe so? Ja. > Die 3.54Nm müsste ich ja leicht drehen können?! LOL, auf einer 6mm Welle ? Aber du kannst ihn ja schon mit den Fingern oder gar ohne anhalten. Dein Motor ist viel zu hross für diesen Treiber. Du musst ihn serial anschliessen mit hoher Induktivität. Das taugt nur für geringe Drehzahlen. Aber 2rpm sollte er kräftig schaffen.
Reinhard schrieb: > Die 3.54Nm müsste ich ja leicht drehen können?! Ein Drehmoment von 3,54Nm entspricht einer Tangentialkraft von 1,18kN an deiner 6mm Welle. Dies ist gleich der Gewichtskraft einer Masse von 120kg. Deine Statur möchte ich nicht haben, wenn du das "leicht" drehen kannst ;-) Oder du leidest an maßloser Selbstüberschätzung ...
Rainer W. schrieb: > Deine Statur möchte ich nicht haben, wenn du das "leicht" drehen kannst > ;-) Er meint im Leerlauf. Aber das Rastmoment wird so 10% betragen, man braucht immer noch Schraubstockfinger. Warum er für eine Drosselklappe so einen Motor braucht, ist schleierhaft, soll wohl zusätzliche PS geben wenn die Klappe wedelt, ich hätte eher auf schnelle Reaktion geachtet. Mit halb so grossen Motoren verfahre ich meine 100kg Fräse.
Reinhard schrieb: > Habe nun endlich ein Datenblatt bekommen. Na endlich, und siehe da, es ist ein NEMA24 und mit 88 mm nicht der Kleinste. Ein Blick auf die Drehmomentkurve zeigt, daß die Drehzahl, die Du erreichen möchtest, kaum mit Deiner Ansteuerung funktionieren wird. Deine Berichte von dem kraftlosen Verhalten des Motors, lassen einen Defekt des Treibers oder eine falsche Verdrahtung vermuten. Du könntest (bzw. mußt unbedingt) versuchen, die Wicklungen parallel zu betreiben. Serielle Verdrahtung ist bei höherer Drehzahl ultimativ schlecht!
Thorsten O. schrieb: > 2 rpm sind > 2U/min, meinst du vielleicht 2 U/s? Stimmt 2rps also die 120 rpm vom Begin des Thread. Sorry mein Fehler. Rainer W. schrieb: > Ein Drehmoment von 3,54Nm entspricht einer Tangentialkraft von 1,18kN an > deiner 6mm Welle. Dies ist gleich der Gewichtskraft einer Masse von > 120kg. > Deine Statur möchte ich nicht haben, wenn du das "leicht" drehen kannst > ;-) > Oder du leidest an maßloser Selbstüberschätzung ... Ok, danke für die Erklärung. Dachte nur weil am 2/3 so langem (56mm) Motor (auch NEMA23) schafft man es problemlos. Von dem hab ich aber kein Datenblatt. Michael B. schrieb: > Warum er für eine Drosselklappe Davon war nirgends die Rede.
Mi N. schrieb: > Deine Berichte von dem kraftlosen Verhalten des Motors, lassen einen > Defekt des Treibers oder eine falsche Verdrahtung vermuten. > Du könntest (bzw. mußt unbedingt) versuchen, die Wicklungen parallel zu > betreiben. Serielle Verdrahtung ist bei höherer Drehzahl ultimativ > schlecht! OK Danke für den Hinweis, werde ich versuchen. Gibt es dazu auch wo was zum Lesen warum das Seriell nicht geht?
Sehr wichtig für höhere Drehzahlen ist die Induktivität der Wicklungen. Bei Parallelschaltung ist sie 1/4 des seriellen Wertes. Wie hoch ist denn die Stromaufnahme des Treibers der 24 V Versorgung bei Stillstand und wie stark sinkt sie bei Drehung ab?
Reinhard schrieb: > Wicklungen parallel Damit komme ich zumindest einmal auf 187 rpm. Sind dann so rund 2.4A am Netzteil. Ob Vollschritt oder 1/4 Teilschritt ist egal. Mi N. schrieb: > bei > Stillstand und wie stark sinkt sie bei Drehung ab? Der DRV8452 hat einen Standstill power saving mode, der ist jetzt aktiv somit schwer zu sagen weil fast 0. Aber ob ich mit 120 rpm fahre oder 187 rpm ist ziemlich egal von der Stromaufnahme. Vl um 100mA bei 120 rpm.
Reinhard schrieb: > Gibt es dazu auch wo was zum Lesen warum das Seriell nicht geht? Es geht schon, aber eben wesentlich schlechter. https://www.elektronik-kompendium.de/sites/slt/0110191.htm https://www.elektrotechnik-fachwissen.de/grundlagen/reihenschaltung-induktivitaet.php https://de.wikipedia.org/wiki/Elektromotorische_Kraft#Elektromotoren_und_Generatoren Reinhard schrieb: > Sind dann so rund 2.4A am Netzteil. Der Strom am Netzteil sagt nicht so richtig viel. Es kommt auf den Spulenstrom an.
Reinhard schrieb: > Aber ob ich mit 120 rpm fahre oder > 187 rpm ist ziemlich egal von der Stromaufnahme. Vl um 100mA bei 120 > rpm. V1 = 24 V? Die Gesamtleistungsaufnahme beträgt bei 24 V und 0,1 A 2,4 W. Das ist sehr wenig und damit ist die Bestromung der Spulen sehr gering. Vermutlich stimmt die Stromeinstellung nicht. Reinhard schrieb: > Sind dann so rund 2.4A am Netzteil. Vorne, hinten, oben, unten? Alles etwas widersprüchlich.
Hm.. nein... 2.4A bei 187 rpm = 100mA weniger als bei 120 rpm. Dort wären es somit 2.5A ist aber wie gesagt nur vom Netzteil abgelesen. Weil ja die Frage war was bei Stillstand die Stromaufnahme ist, die wollte ich wegen dem Power Saving Mode nicht beantwortet, deshalb der Verweis auf die 120rpm. Rainer W. schrieb: > Der Strom am Netzteil sagt nicht so richtig viel. Es kommt auf den > Spulenstrom an. Ist mir bewusst, es läuft aber nur die CPU sonst keine Ausgänge somit ist das ungefähr der halbe Spulenstrom?!
Reinhard schrieb: > Ist mir bewusst, es läuft aber nur die CPU sonst keine Ausgänge somit > ist das ungefähr der halbe Spulenstrom?! Nein, der DRV8452 ist ein Stromregler und benimmt sich von der Stromaufnahme wie ein Step-Down-Wandler. Bei konstantem Spulenstrom sinkt die Stromaufnahme aus dem Netzgeräte, wenn du die Spannung erhöhst oder steigt, wenn du sie verringerst.
Rainer W. schrieb: > der DRV8452 ist ein Stromregler und benimmt sich von der > Stromaufnahme wie ein Step-Down-Wandler Da hast du natürlich recht, hab ich komplett nicht bedacht. Mit Amperemeter im Ausgang sieht die Welt ganz anders aus als am Netzteil abzulesen ist. Im Stillstand fließen wohl die 1.5A bei aktiven Standsill power saving die ich einstelle über CTRL10 ISTSL. Sobald sich der Motor dreht braucht er fast gar keinen Strom mehr. 10 mA @ 120 rpm bzw. 120 mA @ 165 rpm. Dann fängt er zum rattern an und bleibt kurz darauf stehen. Run current CTRL11 ist auf die 4.2A gestellt, hab mal versucht den auf 0.2 zu stellen aber dann fährt er nicht los und im Betrieb runter zu fahren mit CTRL11 klappt auch nicht weil der dann auch bald einmal stehen bleibt. Denke ohne mechanische Last komme ich da wohl nicht ans Ziel.
Reinhard schrieb: > Im Stillstand fließen wohl die 1.5A bei aktiven Standsill power saving > die ich einstelle über CTRL10 ISTSL. > > Sobald sich der Motor dreht braucht er fast gar keinen Strom mehr. 10 mA > @ 120 rpm bzw. 120 mA @ 165 rpm. Dann fängt er zum rattern an und > bleibt kurz darauf stehen. Bei den widersprüchlichen Angaben von Dir, kann man garnicht weiterhelfen. Die unterschiedlichen Stromwerte (siehe auch weiter oben) sind nicht plausibel. > Denke ohne mechanische Last komme ich da wohl nicht ans Ziel. Nein, Du brauchst ein Konzept bei der Fehlersuche. Vielleicht mal einen Tag Pause machen und dann noch einmal ganz vorne anfangen, das wäre mein Rat.
Reinhard schrieb: > Sobald sich der Motor dreht braucht er fast gar keinen Strom mehr. 10 mA > @ 120 rpm Denk erstmal nach, bevor du dich traust, solche Werte hinzuschreiben. Mit 10mA kann der Motor nicht einmal sein Rastmoment überwinden. Du misst Mist. Ist dir klar, dass die Motorwicklungen Wechselstrom bekommen, wenn der Motor sich dreht?
Moin, miss doch mal den Strom bei stehendem Motor. Ist der so, wie Du ihn eingestellt hast? Wenn Du eine Spule Deines Motors direkt vom NT mit Konstantstrom versorgst, lässt sich die Welle genauso schwer drehen? Was passiert, wenn Du die Spannung vom Netzteil vergrößerst? Meine Motoren laufen am ruhigsten mit 1/8 Mikroschritten. Erwarte nicht zu viel von der Rampe. Gruß Carsten
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.