Hallo, Ich habe schon die Suche bemüht, bin aber nicht recht fündig geworden. Ich habe den BTS7960 Brückentreiber und einen 120W Motor. Hochdrehen funktioniert in beide Richtungen(5V auf die en Pins und PWM über den Arduino). Jetzt möchte ich aber den Motor aktiv abbremsen. Also Quadrant 2 oder 4: https://de.wikipedia.org/wiki/Vierquadrantensteller Ist das mit dem Motortreiber möglich? Wenn ja,wie muss ich ihn dafür ansteuern?
Matthias V. schrieb: > Jetzt möchte ich aber den Motor aktiv abbremsen. Wohin soll die durch das Bremsen (zurück)gewonnene Energie? Soll die im Motor als Wärme vernichtet werden? Oder willst du sie in die Versorgung zurückspeisen? Falls zweiteres: kannst du sie überhaupt zurückspeisen, weil du da ausreichend viel (Speicher)Kapazität oder andere Verbraucher hast?
Lothar M. schrieb: > Matthias V. schrieb: >> Jetzt möchte ich aber den Motor aktiv abbremsen. > Wohin soll die durch das Bremsen (zurück)gewonnene Energie? > Soll die im Motor als Wärme vernichtet werden? > Oder willst du sie in die Versorgung zurückspeisen? Falls zweiteres: > kannst du sie überhaupt zurückspeisen, weil du da ausreichend viel > (Speicher)Kapazität oder andere Verbraucher hast? Ich habe einen Schalter, dass es zum Bremsen auf Kondensatoren und LEDs umgeschaltet werden soll. Ich öchte möglichst viel zurückspeisen
Matthias V. schrieb: > Ich habe einen Schalter, dass es zum Bremsen auf Kondensatoren und LEDs > umgeschaltet werden soll. ??? Zeig mal mit einem Schaltplan, wie du das meinst. Und wer den Schalter schaltet... Matthias V. schrieb: > Ich öchte möglichst viel zurückspeisen Die Frage ist in erster Linie nicht, ob du die Rückspeisung "möchtest", sondern ob die Kondensatoren die Bremsenergie aufnehmen können und dabei die Spannung über diesen Kondensatoren dann nicht über zulässige Werte hinaus ansteigt. Denn sonst musst du ab einer bestimmten Spannung die verbleibende Energie in einem Bremswiderstand vernichten. Du musst also zuallererst herausfinden, wieviel Energie da über die Bremsung kommen könnte und dann kannst du zusammen mit der maximal erlaubten Versorgungsspannung der H-Brücke die zur Speicherung nötige Kapazität berechnen.
Angehängte Dateien:
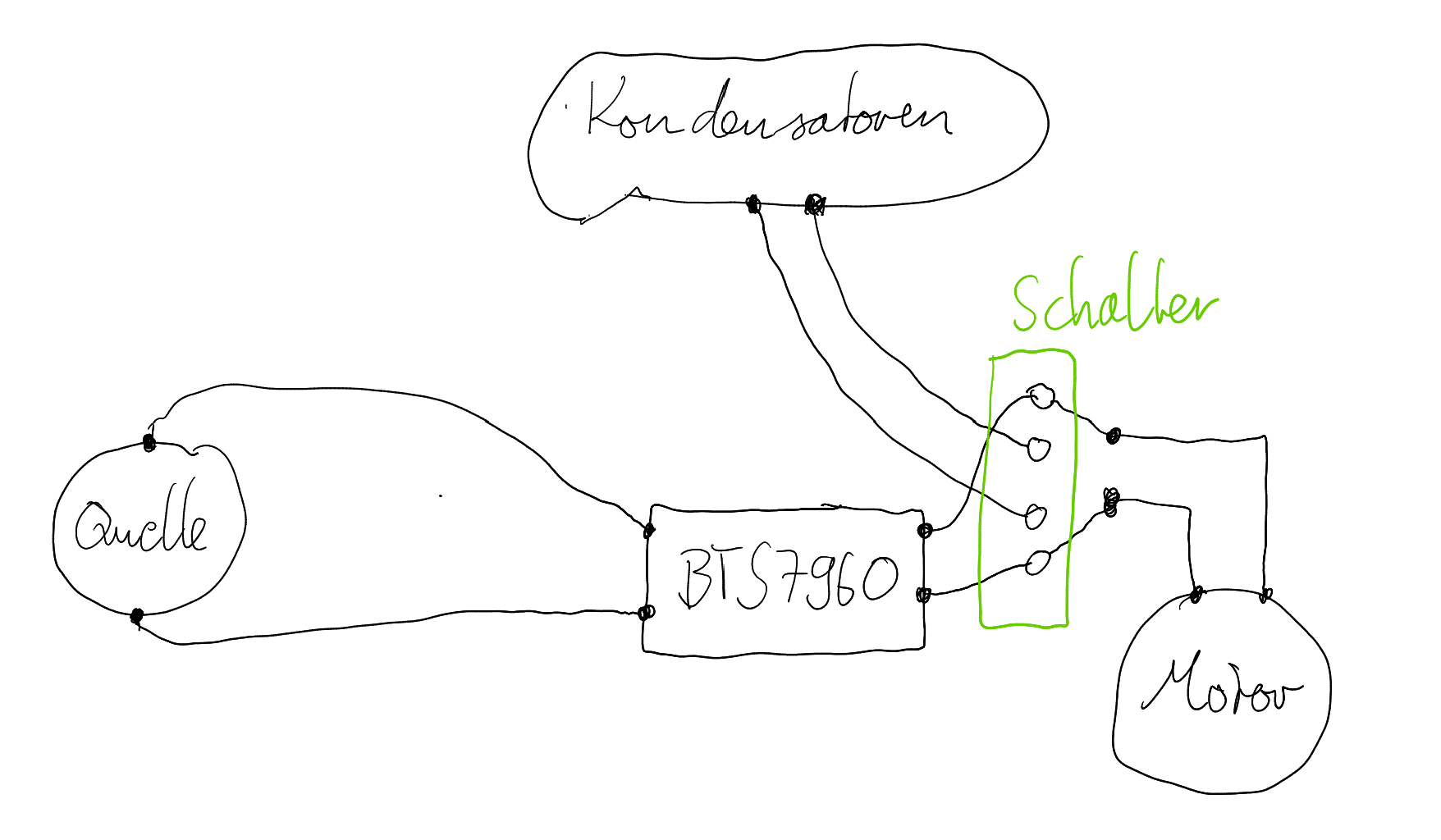
Ich habe einen Universal-Nockenschalter (ja ziemlich groß, aber gerade da). Der Arduino dreht den Motor mit Schwungmasse auf Solldrehzahl und hält diese dann. Dann kann ich händisch den Schalter betätigen und der Motor wird vom Treiber getrennt und auf die Kondensatoren geschaltet. habe eine Prinzipskizze von meiner aktuellen Schaltung angehängt. Entschuldige die Form, muss gerade los. Die Kondensatoren sind berechnet. Das ist hier nicht die Frage. Momentan wird mit einem seperaten Regler in die Kondensatoren gespeist. Die Frage ist, ob dieser Motortreiber das kann. P.S.: so einen habe ich: https://www.amazon.de/Motorantriebsmodul-Hochleistung-Elektrische-Komponenten-stabiler/dp/B08RHQ95MV/ref=asc_df_B08RHQ95MV?tag=bingshoppin0b-21&linkCode=df0&hvadid=80333187860305&hvnetw=o&hvqmt=e&hvbmt=be&hvdev=c&hvlocint=&hvlocphy=&hvtargid=pla-4583932715932188&psc=1
Angehängte Dateien:
-

ibt_2_bts7960.jpg
51 KB -

IBT_2_schematic.PNG
22 KB
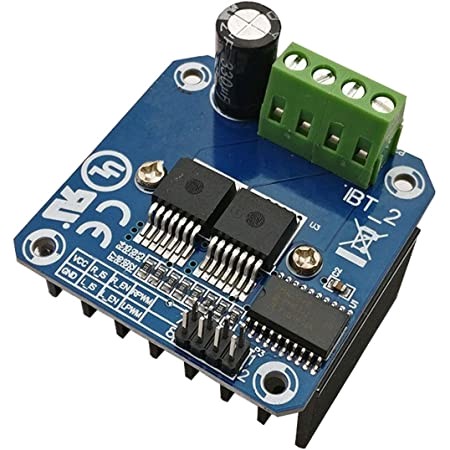
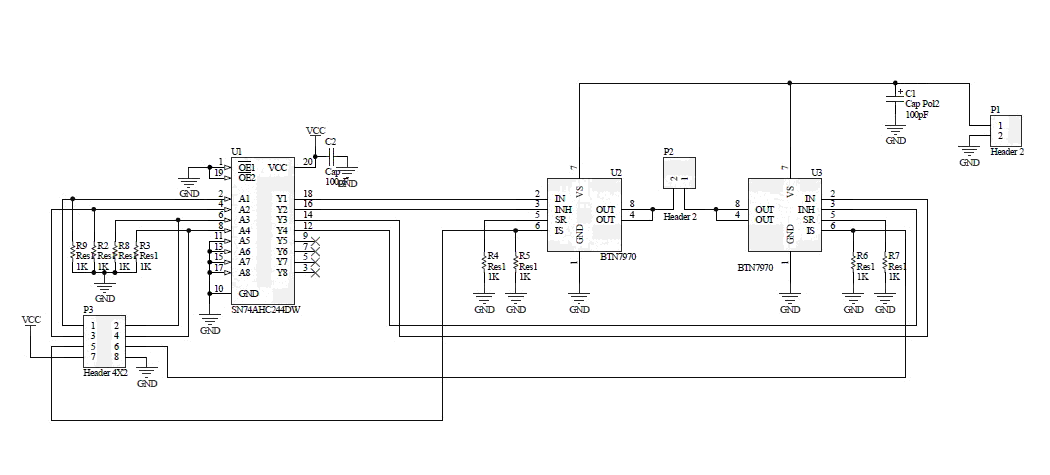
Matthias V. schrieb: > P.S.: so einen habe ich: > https://www.amazon.de/dp/B08RHQ95MV Der heißt IBT_2, und es gibt einen Schaltplan.
H. H. schrieb: > Matthias V. schrieb: >> P.S.: so einen habe ich: >> https://www.amazon.de/dp/B08RHQ95MV > > Der heißt IBT_2, und es gibt einen Schaltplan. Dankeschön. Es hilft mir nur leider bei meinem Wissensstand nicht aus, um zu erkennen wie der andegsteuert werden muss
Angehängte Dateien:
-

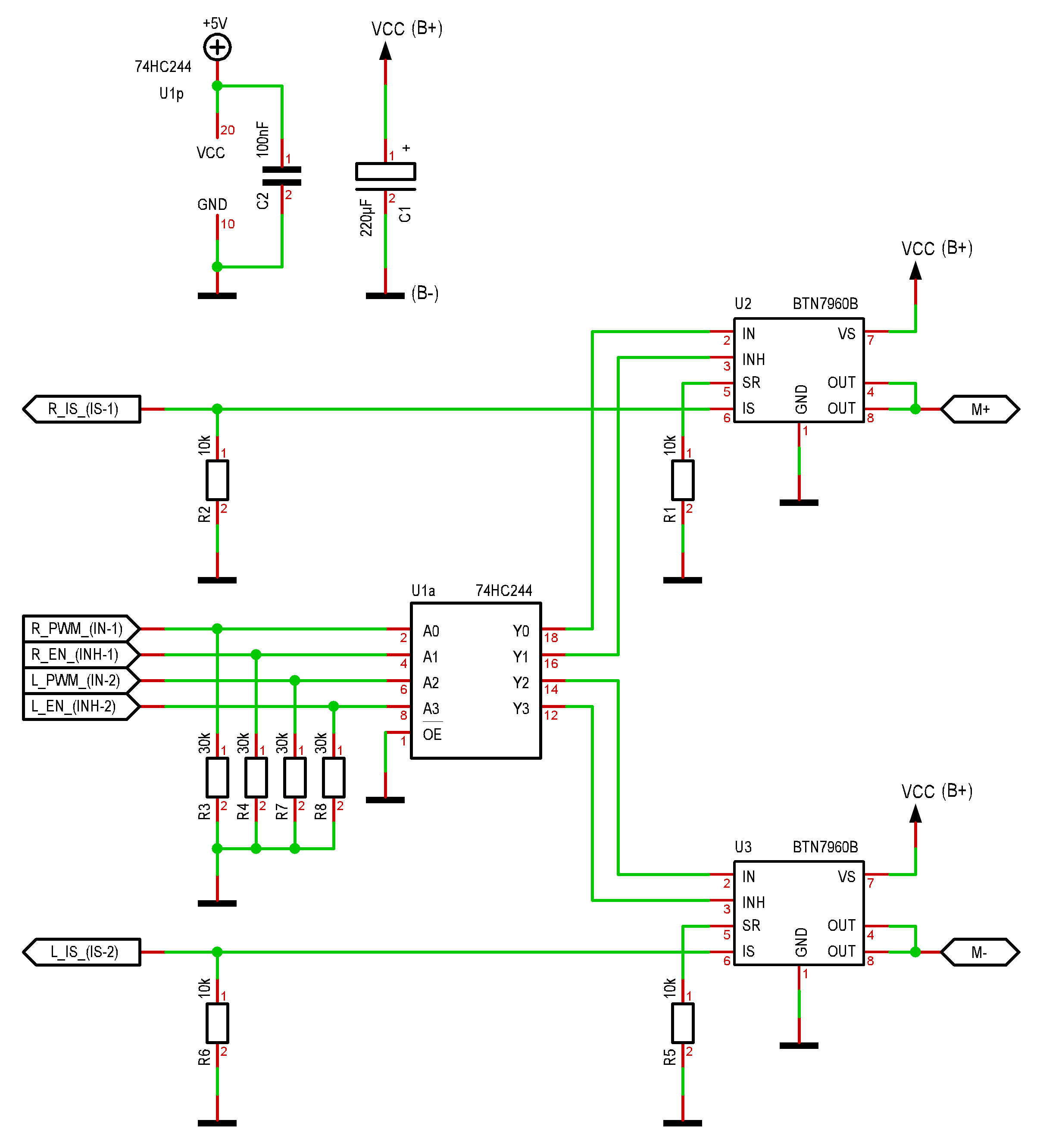
BTN7960B_Schaltplan.png
26 KB
Hallo, wenn du sicherstellen kannst, dass immer nur ein Enable Signal aktiv ist, kannste R/L PWM zusammenfassen und musst nur mit R oder L EN die Richtung steuern. Wenn du das Duty vom PWM Signal langsam reduzierst kannste auch gezielt bremsen. Ansonsten laut Datenblatt.
Matthias V. schrieb: > Ich habe einen Universal-Nockenschalter (ja ziemlich groß, aber gerade > da). > Der Arduino dreht den Motor mit Schwungmasse auf Solldrehzahl und hält > diese dann. Dann kann ich händisch den Schalter betätigen und der Motor > wird vom Treiber getrennt und auf die Kondensatoren geschaltet. Und wozu soll der Spaß gut sein? > Die Kondensatoren sind berechnet. Das ist hier nicht die Frage. Momentan > wird mit einem seperaten Regler in die Kondensatoren gespeist. > Die Frage ist, ob dieser Motortreiber das kann. Einen Motor antreiben? Sicher. > P.S.: so einen habe ich: > https://www.amazon.de/Motorantriebsmodul-Hochleistung-Elektrische-Komponenten-stabiler/dp/B08RHQ95MV/ref=asc_df_B08RHQ95MV?tag=bingshoppin0b-21&linkCode=df0&hvadid=80333187860305&hvnetw=o&hvqmt=e&hvbmt=be&hvdev=c&hvlocint=&hvlocphy=&hvtargid=pla-4583932715932188&psc=1 Der Link taugt nix, vor allem dessen grausame Beschreibung. Eher so. https://www.makershop.de/module/motosteuerung/double-bts7960/
Angehängte Dateien:
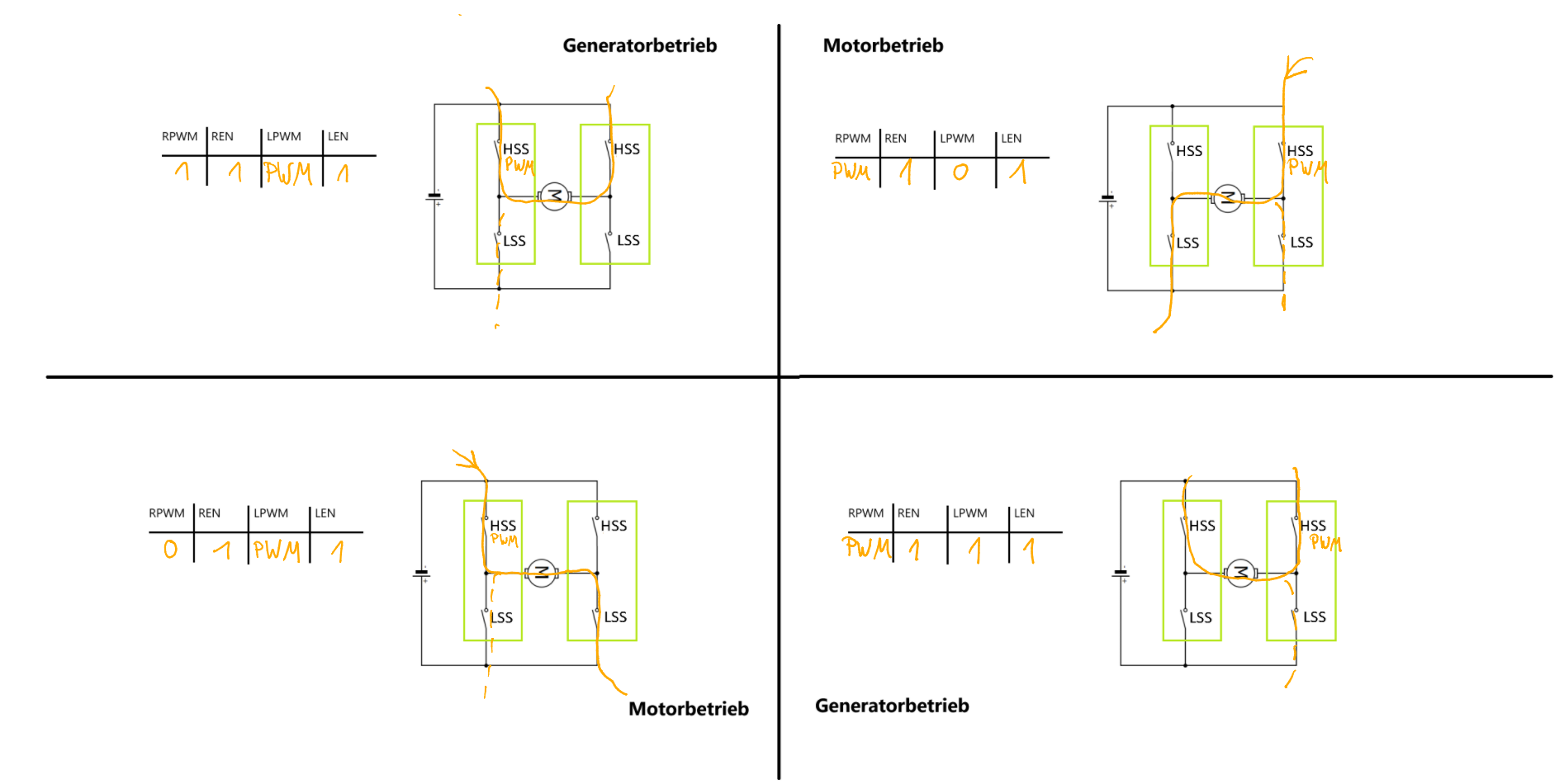
Veit D. schrieb: > Hallo, > > wenn du sicherstellen kannst, dass immer nur ein Enable Signal aktiv > ist, kannste R/L PWM zusammenfassen und musst nur mit R oder L EN die > Richtung steuern. Wenn du das Duty vom PWM Signal langsam reduzierst > kannste auch gezielt bremsen. Ansonsten laut Datenblatt. > von H. H. (hhinz) > Siehe Tabelle 4.4.5 im Datenblatt des BTS7960. Ihr beide habt meine Kopf ganz schön zum qualmen gebracht. Ich habe mir auch mal das Datenblatt von dem NXP 74HC244 angeschaut, welcher auf meinem IBT_2 drauf ist. Der schaltet "nur" durch, oder? Eigentlich brauche ich mir über den keinen Kopf zu machen? Ich habe nach der Tabelle 4.4.5 jetzt mal das Ansteuern in die 4 Quadranten geschmissen. Darf ich euch bitten mal in meine 4 Quadranten zu schauen, ob das Sinn macht?
Matthias V. schrieb: > Ihr beide habt meine Kopf ganz schön zum qualmen gebracht. Ich habe mir > auch mal das Datenblatt von dem NXP 74HC244 angeschaut, welcher auf > meinem IBT_2 drauf ist. Der schaltet "nur" durch, oder? Eigentlich > brauche ich mir über den keinen Kopf zu machen? Richtig, das ist nur ein Puffer. > Ich habe nach der Tabelle 4.4.5 jetzt mal das Ansteuern in die 4 > Quadranten geschmissen. > > Darf ich euch bitten mal in meine 4 Quadranten zu schauen, ob das Sinn > macht? Wenn man die Energie rückgewinnen will, darf die PWM nicht auf Dauer LOW oder HIGH bleiben! Es muss das passende Tastverhältnis gewählt werden, um rückzuspeisen! Wenn man den Motor längere Zeit dauerhaft kurzschließt, ist das eine Vollbremsung und verheizt alle Energie in den Motorwicklungen. Motoransteuerung mit PWM Beitrag "Re: Frage zu H-Brücken Treiber"
Matthias V. schrieb: > Ihr beide habt meine Kopf ganz schön zum qualmen gebracht. Ich habe mir > auch mal das Datenblatt von dem NXP 74HC244 angeschaut, welcher auf > meinem IBT_2 drauf ist. Der schaltet "nur" durch, oder? Eigentlich > brauche ich mir über den keinen Kopf zu machen? > Ich habe nach der Tabelle 4.4.5 jetzt mal das Ansteuern in die 4 > Quadranten geschmissen. > > Darf ich euch bitten mal in meine 4 Quadranten zu schauen, ob das Sinn > macht? Beide Schaltpläne stellen nur die Schaltung dar von den typischen erhältlichen Arduino H-Brücken mit BTS/BTN 7960. Mein Schaltplan beruht auf durchmessen meines gekauften Moduls. Den 244er Puffer IC kann man auch weglassen. Warum der verbaut wird weiß ich nicht. Deine gestrichelten Linien stören. Die können komplett weg. Ansonsten stimmt das erstmal. Tipp. Nimm einen Spielzeugmotor und teste deine Überlegung praktisch. Dabei lernst du mehr. Die Links von Falk kannste natürlich auch noch vorher lesen. Danach hilft nur praktische Erprobung der Theorie. Sonst bist du in der Theorie gefangen. :-)
Falk B. schrieb: > Matthias V. schrieb: >> Ihr beide habt meine Kopf ganz schön zum qualmen gebracht. Ich habe mir >> auch mal das Datenblatt von dem NXP 74HC244 angeschaut, welcher auf >> meinem IBT_2 drauf ist. Der schaltet "nur" durch, oder? Eigentlich >> brauche ich mir über den keinen Kopf zu machen? > > Richtig, das ist nur ein Puffer. > >> Ich habe nach der Tabelle 4.4.5 jetzt mal das Ansteuern in die 4 >> Quadranten geschmissen. >> >> Darf ich euch bitten mal in meine 4 Quadranten zu schauen, ob das Sinn >> macht? > > Wenn man die Energie rückgewinnen will, darf die PWM nicht auf Dauer LOW > oder HIGH bleiben! Es muss das passende Tastverhältnis gewählt werden, > um rückzuspeisen! Wenn man den Motor längere Zeit dauerhaft > kurzschließt, ist das eine Vollbremsung und verheizt alle Energie in den > Motorwicklungen. > Doch, ich möchte ja einen Hochsetzstellerbetrieb: https://de.wikipedia.org/wiki/Vierquadrantensteller Wenn du jetzt in in die obere linke ecke schaust: Zustand1: RPWM - 1 LPWM - 1 => HSSR und HSSL schalten durch: der Motor is "kurzgeschlossen" und die Motorinduktivität lädt sich auf Zustand2: RPWM - 1 LPWM - 0 => HSSR und LSSL schalten durch: der Motor gibt seine Spannung+in der Induktivität gespeicherte Spannung aus Ist vom Prinzip dasselbe her dasselbe wie Falk in dem von dir verlinkten Artikel geschrieben hat. Damit meinen wir aber nicht "dauerhaft" wenn wir von den zwei Zuständen sprechen. Sondern die 2 Situationen in denen die Schaltung aufgrund der PWM ist.
Veit D. schrieb: > Matthias V. schrieb: > >> Ihr beide habt meine Kopf ganz schön zum qualmen gebracht. Ich habe mir >> auch mal das Datenblatt von dem NXP 74HC244 angeschaut, welcher auf >> meinem IBT_2 drauf ist. Der schaltet "nur" durch, oder? Eigentlich >> brauche ich mir über den keinen Kopf zu machen? >> Ich habe nach der Tabelle 4.4.5 jetzt mal das Ansteuern in die 4 >> Quadranten geschmissen. >> >> Darf ich euch bitten mal in meine 4 Quadranten zu schauen, ob das Sinn >> macht? > > Beide Schaltpläne stellen nur die Schaltung dar von den typischen > erhältlichen Arduino H-Brücken mit BTS/BTN 7960. Mein Schaltplan beruht > auf durchmessen meines gekauften Moduls. Den 244er Puffer IC kann man > auch weglassen. Warum der verbaut wird weiß ich nicht. > Ich vermute, dass der Puffer IC dafür da ist die Überstrom und Überspannungsfunktion umzusetzen? (nebenbei: warum puffer? zwei Eingänge schalten je 4 Schalter; so habe ich den zumindest verstanden) > Deine gestrichelten Linien stören. Die können komplett weg. Ansonsten > stimmt das erstmal. Tipp. Nimm einen Spielzeugmotor und teste deine > Überlegung praktisch. Dabei lernst du mehr. Die Links von Falk kannste > natürlich auch noch vorher lesen. Danach hilft nur praktische Erprobung > der Theorie. Sonst bist du in der Theorie gefangen. :-) die gestrichelten Linien sollen zeigen was ist, wenn PWM=0. Ich sehe aber ein: 2 unterschiedliche Farbenwären deutlich klarer gewesen.
Rückmeldung: ES KLAPPT!! Habe keinen Spielzeugmotor, musste es also direkt an meinem Schwungrad ausprobieren. Vielen Dank an Veit und Falk Ihr habt mir mega geholfen!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.