Moin, für meine 5-Phasen Schrittmotore (u. A. RDM 596/50 von Berger Lahr) hatte ich keine Treiber. Eine Ansteuerung habe ich gebaut und möchte diese gerne vorstellen. Ein Bastelfreundlicher ATmega 1284P erzeugt Steuersignale für die Treiberstufe. Die Auswahl der Bauteile wurde weitgehend durch meinen Bastelvorrat bestimmt, um möglichst wenig kaufen zu müssen. Der Motor sollte mit 10-80V betrieben werden können und genügend Strom erhalten. Ich habe einiges ausprobiert und wieder verworfen, bis ich mich für diese Variante entschieden habe. Nach einigen V40-Fehlern läuft der Motor mit der Schaltung ganz gut. Das Programm ist in Assembler geschrieben. Gebaut mit einem alten Pollin Atmel-Evaluations-Board mit „frei fliegendem Aufbau“. Testweise habe ich auch eine kleine hier erworbene Platine und einem günstigen DEBO USB TTL Wandler von Reichelt gebraucht. Auch, wenn ich keine Fehler mehr gefunden habe, ist das Programm sicher nicht fehlerfrei. Der Motor läuft sehr ruhig, weshalb ich mir überlege, ihn in meinem selbstbau XY-Tisch einzubauen. Gruß Carsten
Hallo, Interessant, zumal ich auch noch eine Kiste 5-Phasen-Motoren hier liegen habe. Ein paar Sachen habe ich da jetzt allerdings nicht kapiert: In den Diagrammen zur Bestromung verwendest Du die Symbole Plus , Minus und einen fetten Punkt. Die nicht gekennzeichneten Anschlüsse sind im jeweiligen Bestromungsschritt hochohmig, also beide Transistoren gesperrt, vermute ich mal. Der Anschluss mit dem Punkt liegt dann gegen GND geschaltet? Der Anschluss mit dem Plus an Vcc bzw. an die PWM. Aber woher kommt das Minus-Symbol? Ich sehe in Deiner Schaltung keine negative Spannung. Wird die Stromrichtung nicht dadurch umgekehrt, dass die Anschlüsse zuvor an GND jetzt an + liegen und die zuvor an Plus jetzt an GND? Du schreibst, es soll mit einem Netzteil mit Konstantstrom versorgt werden oder mit Vorwiderständen. Vorwiderstände pro Wicklung zum Begrenzen des Maximalstroms ist klar. Aber wie willst Du das mit der Strombegrenzung eines Netzteils machen? Das würde ja nur funktionieren, wenn immer exakt gleich viele Phasen gleich hoch bestromt sind. Wie gesagt, interessant aber leider sehr verwirrend. Und was ist ein "V40-Fehler"? Gruß
Carsten-Peter C. schrieb: > Eine Ansteuerung habe ich gebaut und möchte diese gerne vorstellen Sehr kurioses Ding. Neben der Schrittmotorversorgungsspannung (20-80V) und Mikrocontrollerversorgung (5V) auch noch 5 bipolare voneinander galvanisch unabhängige Versorgungsspannungen a +/-12V für die Treiberstufen, dazu wird von Stromregelung geredet aber dann der Motorstrom insgesamt strombegrenzt, das bringt natürlich keinerlei Drehzahlsteigerung gegenüber Konstantspannungsbetrieb, ein als 'bastlerfreundluch' angesehener 44 pin uC von dem dann 23 pins nicht verwendet werden. Das mag für dich Carsten-Peter C. schrieb: > weitgehend durch meinen Bastelvorrat bestimmt die richtige Lösung sein, als Nachbauvorschlag aber weitgehend ungeeignet. https://e2e.ti.com/support/motor-drivers-group/motor-drivers/f/motor-drivers-forum/873370/stepper-motor-5-phase Man kann die Motoren auch ganz ohne uC mit einem 10 bit vorwärts/rückwärts Schieberegister steuern.
Hallo Joachim, Der Motor kann in 3 verschiedenen Betriebsarten laufen. Die roten Punkte bedeuten, das die gerade nach + gezogen werden. Alle anderen werden nach – gezogen. Der rote Punkte neben + oder – ist der Bezugspunkt für die 8 Bit-PWM. Schauen wir uns mal oben links MPa: und MPb: an. Den PWM-Wert von B_Phase lesen Die Schrittweite abziehen und zurückschreiben, wenn kein Übertrag auftritt. Bei einem Übertrag auf den Bezugspunkt A_Phase wechseln und 2 PWM-Werte neu schreiben. Die Laufrichtung wird errechnet und der Port C Pin 6 dementsprechend gesetzt. MPa: ;links: +PWM1 Ü= -PWM2 // rechts: -PWM1 Ü= +PWM5 ; links rechts ;j) +E PWM5 ;a) +A -A PWM1 ;b) -B PWM2 Lds AH, ZSchritt in AL, PWM1 sbic PINC, 6 ;Richtung rjmp MPa2 MPa1: ;links rum Ich hab mir auch überlegt, die Zeichnung zu veröffentlichen. Für mich was das ein Leitfaden für den Ablauf. Ist sicher verwirrend. In dieser Betriebsart werden 128000 Schritte / U bei der kleinsten Schrittweite von 1 benötigt. Voreingestellt ist Betriebsart 2 mit einer Schrittweite von 64 (von256). .equ Schrittweite = 63 Also 1+ Schrittweite. Bei 0 würde der Motor nicht weiter drehen. Eigentlich lauft der Motor im Halbschritt, wobei jeder Halbschritt in bis zu 255 Mikroschritte geteilt wird. Der Strom ist etwa gleich, weil 2 Spulen voll bestromt werden und 2 durch die PWM sich den Strom teilen. Beispiel: Wenn der PWM-Wert von Phase 1 64 ist, ist der Wert von Phase2 192. Schwankungen muss das NT aushalten. Die Vorwiderstände erleichtern das Messen. An einer Schaltung für den Konstantstrom mit geringen Verlusten sowie der Ansteuerung über Takt und Richtung bastel ich noch. „V40- Fehler“: Der Fehler sitzt 40 cm vor dem Bildschirm. Viele Grüße aus SH Carsten
Michael B. schrieb: > Sehr kurioses Ding. Besser machen, testen, testen, testen und veröffentlichen. Gruß
Angehängte Dateien:
-

ATmega1284P.jpg
250 KB -

H-Bruecken.jpg
230 KB
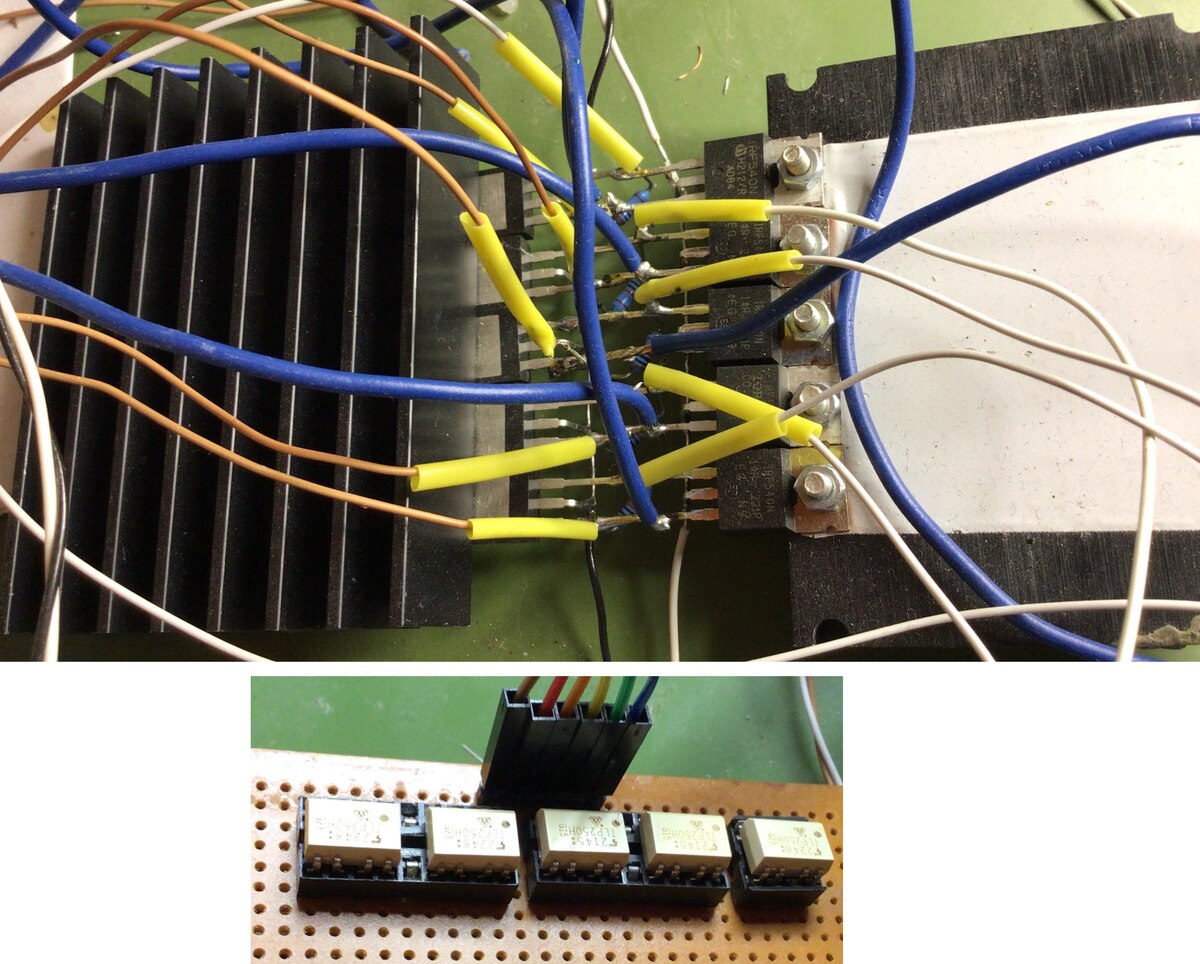
Moin, ich habe meine Schaltung um 2 Eingänge erweitert. Jetzt kann man mit einem Takt und einem Richtungseingang den Motor steuern. Mit jedem Takt läuft der Motor um die eingestellte Schrittweite weiter. In der mittleren Auflösung entspricht eine Umdrehung 64000 Mikroschritte. Voreingestellt ist eine Schrittweite von 64. Nach 1000 Impulsen hat sich der Motor dann einmal gedreht. Im Bild „H-Bruecken.jpg“ sieht man die 5 H-Brücken. Ein halbwegs erfahrener Bastler sollte das hinbekommen. Ich wollte einen größeren Motor mit dem Treiber auf dem Bild „Platine.png“ ansteuern. Beitrag "Re: Zeigt her eure Kunstwerke (2021)" Der drehte sich auch, aber etwas Drehmoment oder Geschwindigkeit kam nicht zu Stande. Bekam der Motor den gleichen Strom direkt vom NT, hielt er kräftig fest. Deshalb habe ich mich für diese Schaltung entschieden. Sollte jemand das Programm brauchen und erweiter, kann ich gerne behilflich sein. Der Speicherbereich von 0x200 bis 0x3FF ist für den Schreibpuffer reserviert. Sollte der Puffer voll laufen, kann der Datenstrom über Port C Pin 7 angehalten werden. Bevor alle Befehle abgearbeitet sind, wird der Datenstrom wieder freigegeben. Das habe ich aber noch nicht getestet. Ich freue mich über Anregungen und Kritiken, nur auf Labereien habe ich keine Lust. Trotzdem gehe ich da kurz drauf ein. Michael B. schrieb: > Neben der Schrittmotorversorgungsspannung (20-80V) Abschreiben sollte man schon können Michael B. schrieb: > ein als > 'bastlerfreundluch' angesehener 44 pin uC von dem dann 23 pins nicht > verwendet werden. ich hab nicht nachgezählt, aber es sollten ca. 40 sein Michael B. schrieb: > Man kann die Motoren auch ganz ohne uC mit einem 10 bit > vorwärts/rückwärts Schieberegister steuern. das stimmt. Ich hatte nur keinen, der auch in Mikroschritten schieben kann Gruß Carsten
Hallo, habe mich ausführlich mit der Reparatur und Ansteuerung von 5-Phasen-Schrittmotor-Steuerungen der Fa. BERGER-LAHR befasst. Um das spezifierte Drehmoment zu erreichen wird jede Phase separat mit Konstantstrom angesteuert. Damit das auch bei höheren Schrittfrequenzen funktioniert ist eine relativ hohe Spannung erforderlich, z.B. 60VDC bei einem Wicklungswiderstand in Grössenordnung 1 Ohm und einem Phasenstrom von 2,5A. Der Motor läuft dabei im Voll- oder Halbschritt mit 500 / 1000 Schritten/Umdrehung. Ansteuerung im Mikroschrittbetrieb halte ich für problematisch: reduziertes Drehmoment, und wahrscheinlich belastungsabhängige Nichtlinearitäten innerhalb eines Schritts. Wenn das jemand interessiert kann ich die Schaltung der BERGER-LAHR D191 (Indexer) und D193 (Leistungskarte) bereit stellen. mfg MoP
Dieter H. schrieb: > Ansteuerung im Mikroschrittbetrieb halte ich für problematisch: > reduziertes Drehmoment, und wahrscheinlich belastungsabhängige > Nichtlinearitäten innerhalb eines Schritts. Es gab Mikroschritt Steuerungen wenn ich mich richtig erinnere D290/D293 Genau wie die D190/D193 sind das Uralt Teile (ca 1985 eingestellt).
Hallo Dieter, mich würden die Schaltpläne der Steuerung schon interessieren. Die habe ich im Netz nicht gefunden. Natürlich ist die Positionierung im Mikroschritt nicht linear und nicht genau, aber mein Motor läuft damit bei langsamen Geschwindigkeiten viel ruhiger. Wie genau die Position oder der gewünschte Winkel tatsächlich ist, kann ich nicht sagen. Zumindest kann man testen, wie schnell und leise er bei unterschiedlichen Geschwindigkeiten und Spannungen läuft. Gruß Carsten
Hallo Dieter, Dieter H. schrieb: > Hallo, > habe mich ausführlich mit der Reparatur und Ansteuerung von > 5-Phasen-Schrittmotor-Steuerungen der Fa. BERGER-LAHR befasst. ... > Ansteuerung im Mikroschrittbetrieb halte ich für problematisch: > reduziertes Drehmoment, und wahrscheinlich belastungsabhängige > Nichtlinearitäten innerhalb eines Schritts. Punkt 1 ist eine urban legend, die auch bei 2-phasigen Motoren immer wieder verbreitet wird, davon aber nicht richtiger wird. So lange die (vektorielle) Summe der Phasenströme gleich bleibt, ändert sich das Drehmoment nicht. Deswegen gibt es bei 2-Phasen Motoren die Unterscheidung zwischen Motornennstrom (Datenblattwert, beide Phasen bestromt, Vollschritt) und dem maximalen Strom, den der Treiber leisten muss (=sqrt(2)*I_nenn, eine Phase bestromt, Halbschrittposition). Bei Punkt 2 hast du im Prinzip recht. Das ist aber keine Nichtlinearität, der entstehende (statische) Positionsfehler ist in erster Linie sehr wohl linear von der Belastung abhängig. Im Prinzip verhält sich der statisch bestromte Motor wie eine Drehfeder. Je höher das extern angreifende Lastmoment, desto stärker wird der Rotor ausgelenkt. Wenn man das Haltemoment überschreitet, rastet der Motor aus. Das wird allgemein gerne übersehen: Mikroschritt-Ansteuerung erhöht die Auflösung und reduziert Störgeräusche deutlich. Die Positioniergenauigkeit steigt aber dadurch nicht automatisch. Für Anwendungen mit hohen Anforderungen an die Positioniergenauigkeit sind Motoren mit kleinerer Schrittweite (0,9° bei 2-Phasen, 0,72° bei 5-Phasen) besser geeignet. Mit freundlichen Grüßen Thorsten Ostermann
Schaltplan der BERGER-LAHR D193. Stimmt, ist schon ziemlich alt und würde man heute anders machen. Es gab später noch die verbesserte D693, da habe ich aber keinen Schaltplan.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.