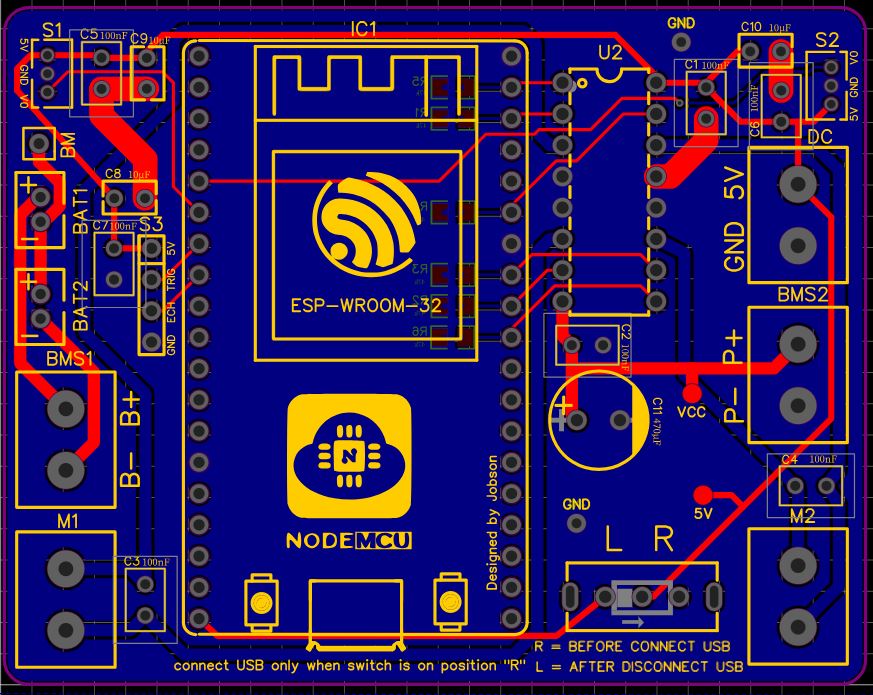
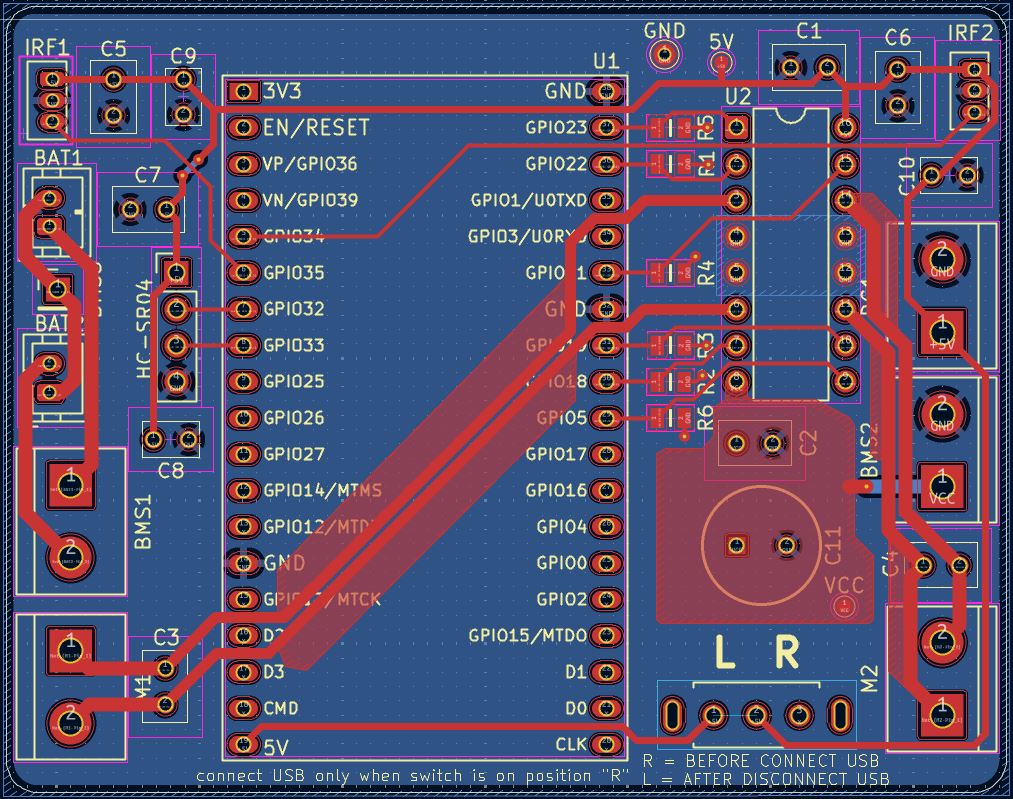
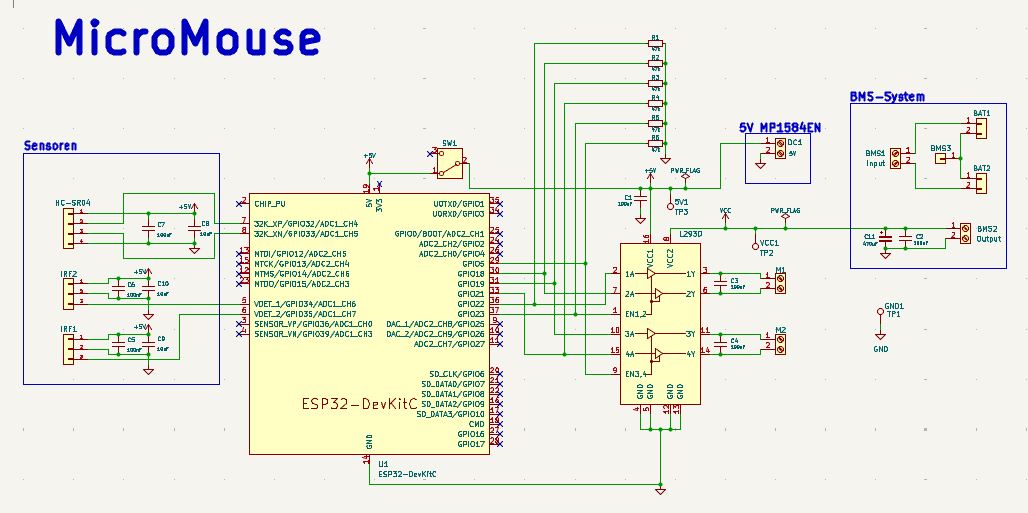
Hi zusammen, habe zwei verschiedene PCB-Layouts, von einem Micro Mouse Projekt, von denen ich eure Meinung bzw. Einschätzung bezüglich des routings gerne hätte. Eines mit EasyEda und das andere mit Kicad erstellt. Anordnung der Bauteile ist nahezu identisch, außer die SMD Pull-Down Widerstände, mit EasyEda auf dem bottom layer und mit Kicad auf dem top layer. Das routing, vor allem Motorleitungen, ist allerdings unterschiedlich. M1 und M2 sind Motoranschlüsse. U2 ist ein L293D H Brückentreiber. Controller ist ein ESP32. Bauteile sind vorgegeben und fix. Geht "nur" ums routing. Benötigt ihr noch andere Infos ? Bin gespannt was so kommen wird :)
Angehängte Dateien:
-

MicroMouse_v1_easyeda.JPG
160 KB -

MicroMouse_v2_kicad.JPG
210 KB -

MicroMouse_v2_kicad_sch.JPG
85 KB
Beide schon mal schietig, weil unter der ESP-Antenne keine Bauteile und Leitungen sein dürfen! Ansonsten wäre ein Schaltplan auch nicht schlecht.
Der ESP, der H Brückentreiber, zwei Infrarotsensoren, ein Ultraschallsensor und die beiden Motoren sind vorgegeben. Da konnten wir nichts ändern.
Arthur K. schrieb: > Benötigt ihr noch andere Infos ? Was ist eine Micro Mouse ? Wie viel glaubst du kommen von den 5V nach dem L293 noch am Motor an ? Wieso 100nF am L293 ? Soll das eine Motorentstörung bewirken ?
1 | +--47uH--+---+---+ |
2 | | | | | |
3 | | | 47nF | |
4 | ----------------+ | | | |
5 | verdrillte Zuleitung 47nF +--(M) |
6 | ----------------+ | | | |
7 | | | 47nF | |
8 | | | | | |
9 | +--47uH--+---+---+ |
Wie wäre stattdessen ein L9110=HG7881 ?
Die 47k Widerstände sind in der Nähe der Antenne zu hochohmig. Sie werden auf das eigene Funksignal reagieren. Du schriebst zwar, die Antenne nicht zu benutzen, aber ich denke, das hast du nicht 100% unter Kontrolle. Gehe da besser auf 2,2k Ohm runter. Michael B. schrieb: > Wieso 100nF am L293 ? Soll das eine Motorentstörung bewirken ? Scheint so, effektiv erzeugen sie aber einen Kurzschluss. Michael hat Recht, für 5V ist der L293 (unabhängig von den Kondensatoren) ungeeignet.
Die 100nF soll(t)en als Motorentstörung dienen. Sind physisch so nah wie möglich an der Schraubklemme zu den Motoren. Auf dem Breadboard hat die Schaltung so funktioniert.(Allerdings noch ohne Pull-Down 47k Ohm) Betriebsspannung sind 2 LiPo Akkus in Reihe, also ~7,4V für den l293d. Die 5V sind für die Sensoren und den ESP. Sind 2,2k Ohm nicht etwas zu niedrig für Pull Down?
Arthur K. schrieb: > Auf dem Breadboard hat die Schaltung so funktioniert. Das Breadboard hat ja auch beträchtliche Übergangswiderstände an den Kontakten, die den Kurzschluss lindern. > Sind 2,2k Ohm nicht etwas zu niedrig für Pull Down? Bei mir waren mal 10k zu viel und 4,7k grenzwertig. Deswegen empfehle ich 2,2k. Das ist bestimmt nicht zu niederohmig, denn der ESP kann mehr als 10x so viel Strom liefern. Wenn es egal ist, das die Motoren beim Booten ein bisschen zucken, kannst du die Pull-Widerstände ganz weg lassen.
Arthur K. schrieb: > Die 100nF soll(t)en als Motorentstörung dienen Aus welchem Märchenbuch hast du die Empfehlung ? Geschaltete Kapazitäten müssen durch Induktivitäten (oder Widerstände) vom Schaltelement abgetrennt werden, sonst störst du mehr als es entstört.
Mist. Danke für die Aufklärung! Idealfall wäre dann wohl der LC Filter den du oben drüber gepostet hast, oder?
Die 2,2k Ohm als Pull Down wären dann auch besser? Gibt es sonst noch kritische Stellen die dringenden Änderungsbedarf benötigen? Danke schon mal!
Michael B. schrieb: > Arthur K. schrieb: >> Benötigt ihr noch andere Infos ? > > Was ist eine Micro Mouse ? Ein autonomer Kleinst-Roboter der ein Ziel durch ein Labyrinth erreichen muss.
Arthur K. schrieb: > Die 2,2k Ohm als Pull Down wären dann auch besser? Zweimal habe ich es schon geschrieben. Jetzt zum dritten mal: ja.
Nemopuk schrieb: > Zweimal habe ich es schon geschrieben. Jetzt zum dritten mal: ja. Hast recht, danke! Sind die Werte für den LC Filter 47uH und 47nF gängige Werte? Oder wie bist du so schnell auf die Werte gekommen? Ich denke die typische Formel für Fg kann man hier nur näherungsweise annehmen, oder ?
Arthur K. schrieb: > Oder wie bist du so schnell auf die Werte gekommen? Das ist ein viel zitiertes Schaltungsbeispiel. Die Werte müssen an die jeweilige Maschine angepasst werden. Dazu gibt es keine einfache Formel. Ich schätze, die optimalen Werte ermittelt man eher durch Versuche in einem Messlabor. Und ich schätze auch, dass im Consumer Bereich fast kein Hersteller Zeit und Geld in diesen Aufwand steckt. Hauptsache, der Fernseher fällt nicht aus, wenn der Ventilator läuft.
Arthur K. schrieb: > Sind die Werte für den LC Filter 47uH und 47nF gängige Werte Ja, für kleinere Motoren (Spielzeugmotore). Nemopuk schrieb: > Die Werte müssen an die jeweilige Maschine angepasst werden. UKW Drosseln und Keramikkondensatoren blocken schon mal das meiste. Zumindest verhindern die Spulen, dass die Schalttransistoren jedesmal in einen Kurzschluss schalten müssen. Optimal, klar, wird es durch messen und probieren.
Rene K. schrieb: > Wieso dann ein ESP32? Tja, mit einem der diversen auf Motorsteuerung optimierten STM32 dürfte es vermutlich einfacher sein präzise Timings für den Motortreiber zu erzeugen. Allerdings spielt es bei DC-Motoren vermutlich keine große Rolle... Und wenn man sowieso kein HF macht kann man den Mikrocontroller auch direkt aufs PCB löten, da braucht man kein klobiges Modul. Ein Layout für den STM32 ist schnell gemacht.
Pulldown auf 2,2k Ohm reduzieren, einen ordentlichen LC Filter für beide Motoren. Wenn ich schon am ändern, verbessern des Layouts bin, gibt es noch andere Baustellen die ihr auf Anhieb adhoc ändern würdet? IRF1/2 sind Sharp GP2Y0A51SK0F. Ultraschallsensor ist der HC-SR04. Danke bis hierhin für euren Input!
Michael B. schrieb: > Arthur K. schrieb: >> Benötigt ihr noch andere Infos ? > > Was ist eine Micro Mouse ? Erster Beitrag hier: Beitrag "Gute Technik Doku Videos"
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.