aus diesem Forum hab ich schon VIELE Informationen ziehen können - diesmal hab ich allerdings ein Projekt, bei dem ich alleine nicht wirklich weiterkomme :(
Dies ist übrigens mein erster Thread hier - bitte seid nachsichtig mit mir :)
Ich möchte in ein Modell-Uboot Sonar-Sensoren integrieren (4 oder 7 Stück, abhängig vom Erfassungswinkel der Sensoren), um Hindernisse voraus und seitlich zu erkennen und zu erkennen, wenn der Abstand zum Grund einen bestimmten Wert unterschreitet.
Grundlegende Daten:
Erkennbare Hindernis-Größe ist erstmal nicht relevant, auch z.B. Wasserpflanzen am Boden sind erstmal nicht relevant
Maximale Sensorreichweite ca. 2m
minimale Entfernung ist momentan auch nicht wirklich relevant
jeder Sensor muss aus EINEM Transducer bestehen, der also als Sender und Empfänger dienen muss
die grundsätzliche Auswertung der Laufzeit erfolgt mit nem eigenen Mikrocontroller (z.B. Arduino Nano, ATTINY, ESP32, ...)
die notwendige Genauigkeit sollte ungefähr im Bereich +/- 1cm liegen, bis +/- 5cm wär im ersten Schritt auch völlig ok
Als Transducer würde ich zwar gerne billige Piezo-Scheiben verwenden, aber ringförmige Piezos könnte ich auch finanzieren :)
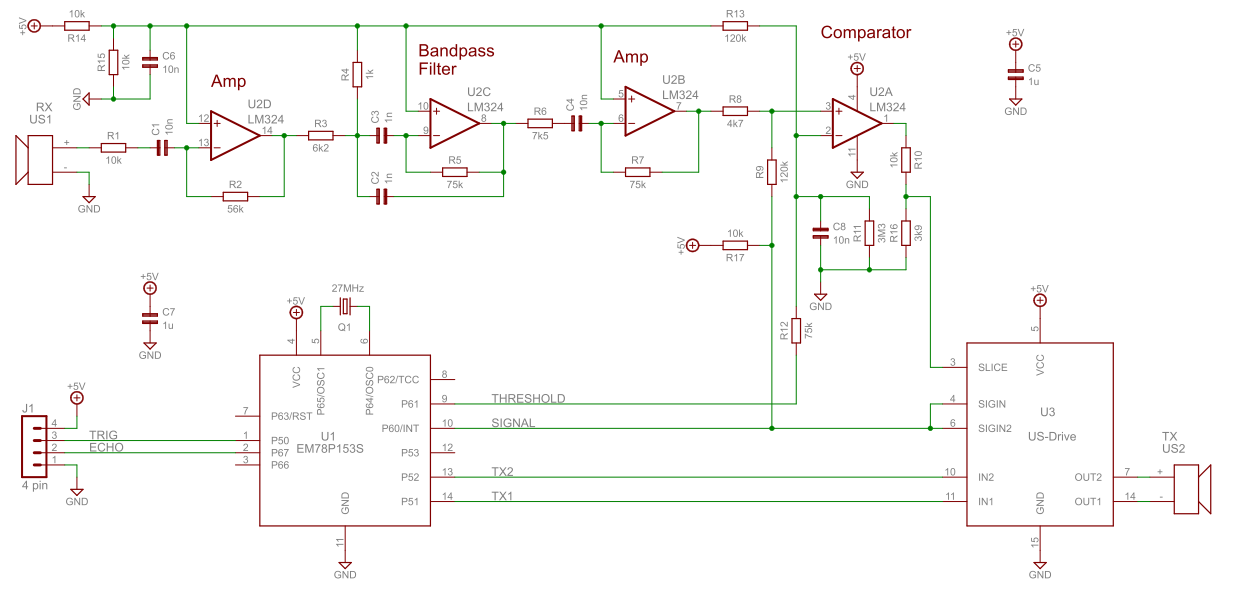
Nach einiger Recherche hab ich den Schaltplan eines HC-SR04 (Ultraschall-Entfernungsmesser in Luft) auftreiben können - siehe angehängte Datei. Die verwendeten drei Chips sind LM324 (4-fach-OPV), RCWL-9300 (Mikrocontroller) und (vermutlich) RCWL-9206 (Ultrasonic-Disc-Driver).
Das grundsätzliche Funktionsprinzip entspricht ja dem, was ich machen will, aber so ganz hab ich nicht verstanden, was in dieser Schaltung passiert.
Daher meine Fragen:
a) U3 (vermutlich ein RCWL-9206, von dem scheinbar absolut kein Datenblatt aufzutreiben ist): warum "braucht" der das Eingangssignal des Empfängers (SIGIN / SIGIN2)?
b) der Comparator: nach meinem Verständnis: wozu benötigt der Sender die (digitale) Info, ob am Empfänger ein Signal ankommt?
c) wie kann ich die Schaltung so ändern, dass für Senden und Empfangen ein einziger Transducer ausreicht?
Schon jetzt vielen Dank für Eure Zeit, Euer Gehirnschmalz und Eure Antworten!
Nach einiger Recherche hab ich den Schaltplan eines HC-SR04
(Ultraschall-Entfernungsmesser in Luft) auftreiben können
🤦
Ultraschall Wasser und Ultraschall Luft sind zwei ganz unterschiedliche Geschichten. Für Wasser ist Frequenz wie Geschwindigkeit um ein mehrfaches höher, da brauchste andere Piezokristalle (oder -folien) und -treiber.
Luft: 40 kHz 330 m/s
Wasser: > 100 kHz 1500 m/s
Also an deiner Stelle würd ich den obigen Schaltplan verbrennen und von vorne anfangen. Beispielsweise sich mal über Hydrophone einlesen. Da mal was modernes: https://www.ti.com/lit/ug/tidu702/tidu702.pdf
Das ist aber schon mit Phase-array und chirp-signal und damit etwas über dem Niveau einer Arduino-Bastelei.
Nimm die Suchmaschine deines Vertrauens und suche nach Echolot. Da könntest du was finden. Es wird aber nicht einfach, da gescheite Messwerte zu erhalten. Die digitale Signalverarbeitung ist nicht trivial, wenn du reproduzierbare Informationen haben willst. Viel Spaß damit.
erstmal vy 73 - hier ist DL5MAV :)
Ja, ich hab schon gemerkt, dass es scheinbar echt nicht einfach ist, die Echos auszuwerten. Das ankommende Signal ist sicher schwer zu interpretieren. Allerdings reicht mir im ersten Moment eine Schaltung, um das "erste" Echo erkennen zu können.
Dass hier viele sekundäre Effekte auftreten habe ich gelesen. Andererseits gibts (z.B. zum Auffinden von Fisch-Schwärmen oder einzelnen Fischen für Angler) Lösungen, die aufgrund der angegebenen Spezifikationen und des Verkaufspreises nicht sonderlich aufwändig sein können.
Es geht mir tatsächlich auch erstmal nur ums "Herantasten": eine Schaltung, die platz- und stromsparend 4 oder 7 Transducer bedienen kann (kurzen Burst senden, dann auf Empfänger umschalten, Signal verstärken und filtern) wär für mich schon mal ein echter Gewinn :)
erstmal vy 73 - hier ist DL5MAV :)
Ja, ich hab schon gemerkt, dass es scheinbar echt nicht einfach ist, die
Echos auszuwerten. Das ankommende Signal ist sicher schwer zu
interpretieren. Allerdings reicht mir im ersten Moment eine Schaltung,
um das "erste" Echo erkennen zu können.
Dass hier viele sekundäre Effekte auftreten habe ich gelesen.
Andererseits gibts (z.B. zum Auffinden von Fisch-Schwärmen oder
einzelnen Fischen für Angler) Lösungen, die aufgrund der angegebenen
Spezifikationen und des Verkaufspreises nicht sonderlich aufwändig sein
können.
Es geht mir tatsächlich auch erstmal nur ums "Herantasten": eine
Schaltung, die platz- und stromsparend 4 oder 7 Transducer bedienen kann
(kurzen Burst senden, dann auf Empfänger umschalten, Signal verstärken
und filtern) wär für mich schon mal ein echter Gewinn :)
Fischfinder arbeiten nach dem Sonar-Prinzip.
Da wird ein Hochspannungsimpuls auf nen Quarz gegeben, und
dann auf Empfang umgeschaltet.
Das wird so schnell getan, das man auf einem Bilschirm sehen kann,
was unterm Boot vor sich geht.
Lösungen, die aufgrund der angegebenen
Spezifikationen und des Verkaufspreises nicht sonderlich aufwändig sein
können.
Scherzkeks, wenn man eine CPU für wenig Geld bspw. 5 US-$ kaufen kann, heisst es nicht, das eine CPU un-komplex ist.
Es geht mir tatsächlich auch erstmal nur ums "Herantasten": eine
Schaltung, die platz- und stromsparend 4 oder 7 Transducer bedienen kann
(kurzen Burst senden, dann auf Empfänger umschalten, Signal verstärken
und filtern) wär für mich schon mal ein echter Gewinn :)
Dann berechne mal als erstes die Zeit die zum Umschalten zur Verfügung steht. Vielleicht wäre aber eine Architektur mit getrennten Rx und Tx ohnehin sinnvoller ... man könnte beispielsweise mit einem Unterwasser-Microphon nach der BBC-Douglas-Adams-Emergency-Methodik anfangen .. normales Microphon mittels eines übergestülpten Condom wasserfest gemacht.
Es geht mir tatsächlich auch erstmal nur ums "Herantasten":
Dann bestell das ali teil dass ich verlinkt habe.
Günstiger kommst du nicht an wasser transducer und funktionierende elektronik.
Auslesbar seriell, puls oder I2C.
erstmal vielen herzlichen Dank für eure schnellen Antworten!
Es ist wirklich cool, wie viel schnelles Feedback man hier bekommt.
Ich hatte zwar versucht, meine Fragen so präzise als möglich zu stellen - allerdings hat bisher keiner, der geantwortet hat, auch nur irgendeinen Bezug auf meine Fragen genommen :-/
Daher reduziere ich mich auf eine einzige Frage:
Wie kann ich in einer Schaltung, die grundsätzlich an die obige Schaltung angelehnt ist, statt zwei Transducern nur einen einzigen verwenden?
Wie kann ich in einer Schaltung, die grundsätzlich an die obige
Schaltung angelehnt ist, statt zwei Transducern nur einen einzigen
verwenden?
Bevor du die Schaltung angehst, musst du dir darüber im klaren sein, dass du dir dadurch eine tote Zone einhandelst, weil der Schallwandler wegen seiner Güte nachschwingt und in der Zeit noch nichts empfangen kann. Hast du dir die Schallwelle, die so ein Wandler abgibt, einmal angesehen?
danke für Deine Antwort!
Wie ich allerdings geschrieben hatte: "- minimale Entfernung ist momentan auch nicht wirklich relevant"
Die tote Zone ist im Moment nicht entscheidend.
vg, Florian
Wenn man einen Totbereich von 50cm haben will und die Schallgeschwindigkeit in Wasser bei 1500m/s liegt, muss man Beginn Impuls/Chirp-Aussendung bis empfangsbereit in 667µs schaffen.
Das mit einem einzigen Transducer zu händeln ist nicht sehr einfach. Du musst einen Umschalter bauen, der deine Hochfrequenz/Hochspannungspulse (200kHz, 100V) und deine niedrigen Empfangssignale (im mV-Bereich) verarbeiten kann. Dann brauchst du noch einen zeitabhängigen Verstärker dahinter, denn die Echos werden mit grösserem Abstand rasch kleiner.
Obwohl ich einige meiner Berufsjahre mit der Entwicklung von medizinischen US-Geräten verbracht habe (Phased Arrays, 3-10MHz), ist mir nichts Brauchbares für Wasser gelungen.
Mittlerweilen gibt es auch fertige US-Lösungen. Schau mal bei TI und anderen Halbleiterfirmen. Vielleicht findest du was. Einen passenden Transducer zu finden, wird aber ein Problem bleiben. Wir haben die Keramik damals selbst hergestellt.
herzlichen Dank für Deine wirklich hilfreiche Antwort!
Hab bereits in den Datenblättern von PGA460 und TUSS4470 gewühlt - ich werds damit wohl erstmal ausprobieren.
Bzgl. Keramik: Ringförmige Piezos scheinen wohl am aussichtsreichsten, auch wenn ich den Grund für genau diese Form noch nicht verstanden habe; ich vermute mal, dass durch diese Form der Beam gerichteter und damit die max. Entfernung größer wird? Mir würden ja 2-3m völlig reichen.
Ich glaub Dir übrigens sofort, dass das ein schwieriges Thema ist. Es war wohl ne irrige Annahme von mir, dass es wegen der Inkompressibilität von Wasser sogar einfacher sein könnte als in Luft...
Ein Phased-Array wäre natürlich cool - aber erstens: eins nach dem Anderen :) Zweitens hab ich dafür vermutlich (noch) keinen Platz im Boot.
Die Phased Arrays waren übrigens ca. 10cm lange Streifen von Piezokeramik, die in 128 Kanäle gesägt wurden. Hinten kam vorher ein Kunststoff drauf, der als Dämpfung für die rückwärtige Welle diente. Kontakte wurden dann mit Gold aufgesputtert. Die S/E-Umschaltung waren Dichschicktschaltungen, da es noch keinen Halbleiterprozess gab, der die hohen Spannungen und den nötigen Rauschfaktor gleichzeitig beherrschte. Und das ganze musste ja auch noch in die Hand passen. War 'ne heiße Technik, damals in den 80ern.
Wenn es dich interessiert, hier sind auch ein paar interessante Bilder unserer Geräte (Sonoline-Serie) https://www.ultraschallmuseum.de/download/Geraeteliste-2010.pdf
Der Empfangsverstärker liegt über nen hochohmigen Widerstand
parallel zu Quarz / Sensor und wird am Eingang nach einer
Spannungsberenzung durch nen Diodenschalter (PIN-Dioden?)
beim Senden kurzgeschlossen.
Nach Abklingen der Quarzschwingung wird er geöffnet,
und der Verstärker / Komperator wartet mit Hoher Empfindlichkeit
aufs Echo.
Die Phased Arrays waren übrigens ca. 10cm lange Streifen von
Piezokeramik
Side-scan sonar braucht eine spezielle beam-form um nur die echos senkrecht zur bewegungsrichtung zu empfangen.
Wird dazu ein lineares phased array zum beamforming benutzt oder wird das rein mechanisch gemacht?
Die akustische Impedanz passt nicht für Unterwasserankopplung.
Ist ein scheibenförmiger piezo wandler im wasser besser?
Oder braucht es einen massiven konus mit gegengewicht wie das die ultraschall reinigungsgeräte haben?
Beim Fischfinder wird der Sensor auf einer Metallplatte befestigt.
Das Ganze ist dann so vergossen, das die Metallplatte mit dem Wasser
in Berührung steht.
Beim Fischfinder wird der Sensor auf einer Metallplatte befestigt.
Der piezo braucht ja eine gegengewicht, so dimensioniert dass das bei betriebsfrequenz mechanisch resonant ist. Einfach piezo auf metallplatte dann schwingt das freie ende des piezo und nicht die metallplatte.
Beim Fischfinder wird der Sensor auf einer Metallplatte befestigt.
Der piezo braucht ja eine gegengewicht, so dimensioniert dass das bei
betriebsfrequenz mechanisch resonant ist. Einfach piezo auf metallplatte
dann schwingt das freie ende des piezo und nicht die metallplatte.
Wie ist das gelöst?
Der Fischfinder-Sensor wird ja mit nem Winkel am Spiegel des Bootes
angeschraubt.
Ob die Metallplatte auf Resonanz abgestimmt ist , weiß ich nicht.
Ich kann mir vorstellen das das Boot das Gegengewicht bildet.
Oder im vergossenen Strahler ist es drinne.
Die Winkelauflösung und Richtungssteuerung bei Multibeam Soundern erfolgt über die Phasenverschiebung zwischen den als 'T' angeordneten Transducern. Die Größe dieser Struktur legt zusammen mit der Wellenlänge den Öffnungswinkel fest. Der Signalprozessor muss sich um die Mathematik dahinter kümmern ;-)
https://www.teledynemarine.com/brands/reson/hydrosweep
Du
musst einen Umschalter bauen, der deine Hochfrequenz/Hochspannungspulse
(200kHz, 100V) und deine niedrigen Empfangssignale (im mV-Bereich)
verarbeiten kann.
Ist eigentlich das gleiche, wie bei einem Defi. Du hast das EKG angeschlossen, das im mV-Bereich arbeitet, und dann haust du mit dem Defi bis zu 4 kV und 50 A in den Körper.
Daher wäre ein Sonar mit getrenntem Sender und Empfänger elektronisch gesehen einfacher zu realisieren. Die Piezoscheiben sollten dann aber auch einigermassen vom Schiffsrumpf entkoppelt sein und etwas Luft nach hinten haben. Z. B. auf eine dünne Polycarbonatscheibe geklebt. und dann mit einer 1 mm-Dichtung dahiner eine zweite Scheibe und Luft dazwischen.
 Schaltplan_HC-SR04.jpg
(77 KB)
Schaltplan_HC-SR04.jpg
(77 KB)