Floppy Spindel-Motore sind üblicherweise BLDC Motore. Manche haben wenige flache (z.B. 6) Wicklungen. Siehe z.B. https://martin-jones.com/wp-content/uploads/2014/04/img_6338.jpg Kann mir jemand sagen wieviele Pole dann der Rotor hat ?
Der Rotor ist hier ein flacher Permanentmagnet. Wieviele Pole hat ein Permanentmagnet? Ich würd' glatt sagen: Zwei.
Harald K. schrieb: > Ich würd' glatt sagen: Zwei. Kann sein, muss aber nicht. Hast du einen kleinen Magneten zur Hand? Führe den mit einem Pol nahe am äußeren Radius der Magnetscheibe entlang. Einmal anziehen und abstoßen wären zwei.
Es gibt durchaus mehrpolige Magnete, einfach ein Papier oder Folie drauflegen und Eisenfeilspäne streuen, sie richten sich nach den Feldlinien aus. Ich habe eine Folie im Scheckkartenformat, die ebenfalls Magnetfelder sichtbar machen kann. Oder mit einem zweiten Magneten den Umfang "abtasten", dann spürt man die Pole deutlich.
Die Frage ist eine eher theoretische. Ich habe keinen Floppy Motor im Zugriff.
Richi hat eine 3,5"-Floppy (Samsung SFD-321B) analysiert, allerdings kein Wort zum Rotor-Magneten. https://www.richis-lab.de/floppy.htm "Der Rotor des Diskettenantriebs ist unspektakulär aufgebaut. Er besteht aus einem ringförmigen Magneten." Der Stator hat 3*6=18 Arme.
Harald K. schrieb: > Der Rotor ist hier ein flacher Permanentmagnet. Wieviele Pole hat > ein > Permanentmagnet? > > Ich würd' glatt sagen: Zwei. Eher 6 oder 12.
Scheint nicht eindeutig zu sein: Beitrag "Brushless DC Motor: 12 Spulen / 14 Magente ?" Da hilft nur die Polpaare am Ringmagneten mit einem Nagel abzufahren und zu zählen.
Harald K. schrieb: > Ich würd' glatt sagen: Zwei. Fast richtig - es gibt zwei Typen von Polen: Nord- und Südpole. Wieviele davon der Rotor besitzt, hängt von seiner Magnetisierung ab. Martin O. schrieb: > Ich habe keinen Floppy Motor im Zugriff. Genauso könntest du dann fragen, wieviel Kilowatt besitzt ein Automotor. Wieviele Polpaare der Rotor besitzt, hängt davon ab, wie der Hersteller seinen Motor ausgelegt hat und was er bei seinem Zulieferer bestellt hat ;-)
:
Bearbeitet durch User
Martin O. schrieb: > Kann mir jemand sagen wieviele Pole dann der Rotor hat Ein Floppymotor (vermutlich jeder, nutzen ja alle dieselben Ansteuerchips) hat 4 Polpaare, dabei werden die Magnetpole auf dem scheibenförmigen Permanentmagneten des Rotors gezählt, nicht die Spulen.
Angehängte Dateien:
-

pancake.PNG
18 KB
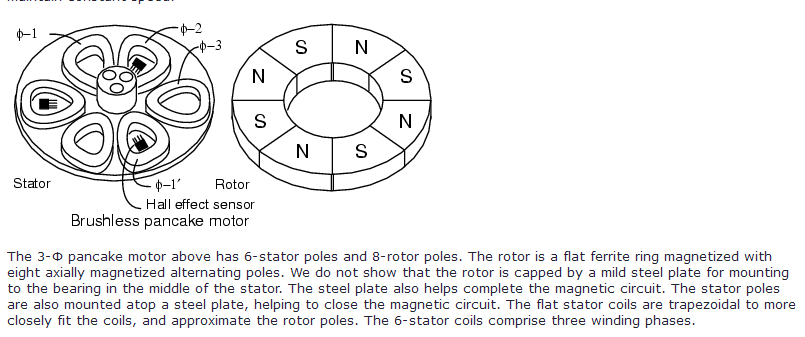
> Floppy Spindel-Motore sind üblicherweise BLDC Motore. Manche haben > wenige flache (z.B. 6) Wicklungen. > Kann mir jemand sagen wieviele Pole dann der Rotor hat ? Typisch sind bei den Pfannkuchen-Motoren wohl acht Pole am Rotor: Anhang aus http://www.vias.org/feee/c13_motors_07.html Als Synonym für den Scheibenläufermotor werden auch die Begriffe "Pancake-Motor", "Printed-Motor", "Servodisc-Motor", "Flacher Motor", "Flachmotor" oder "Flat-Armature-Motor" verwendet.
:
Bearbeitet durch User
Ungleiche Zahl von Stator- und Läufer-Polen. Bei gleichen wurde das zu stark rasten und nicht von selbst los laufen.
.● Des|ntegrator ●. schrieb: > Ungleiche Zahl von Stator- und Läufer-Polen. > > Bei gleichen wurde das zu stark rasten und nicht von selbst los laufen. Bei einem eisenlosen Stator? Grüßle, Volker
Volker B. schrieb: > .● Des|ntegrator ●. schrieb: >> Ungleiche Zahl von Stator- und Läufer-Polen. >> >> Bei gleichen wurde das zu stark rasten und nicht von selbst los laufen. > > Bei einem eisenlosen Stator? > > Grüßle, > Volker Im Einschaltmoment?
.● Des|ntegrator ●. schrieb: > Im Einschaltmoment? Wenn die Bestromung richtig ist, also Anker- und Erregerdurchflutung einen Winkel von 90° (el.) bilden, läuft der Motor mit eisenlosen Stator stets an -- wollen wir wetten? Grüßle, Volker
Angehängte Dateien:
-

floppy-motor.jpeg
330 KB
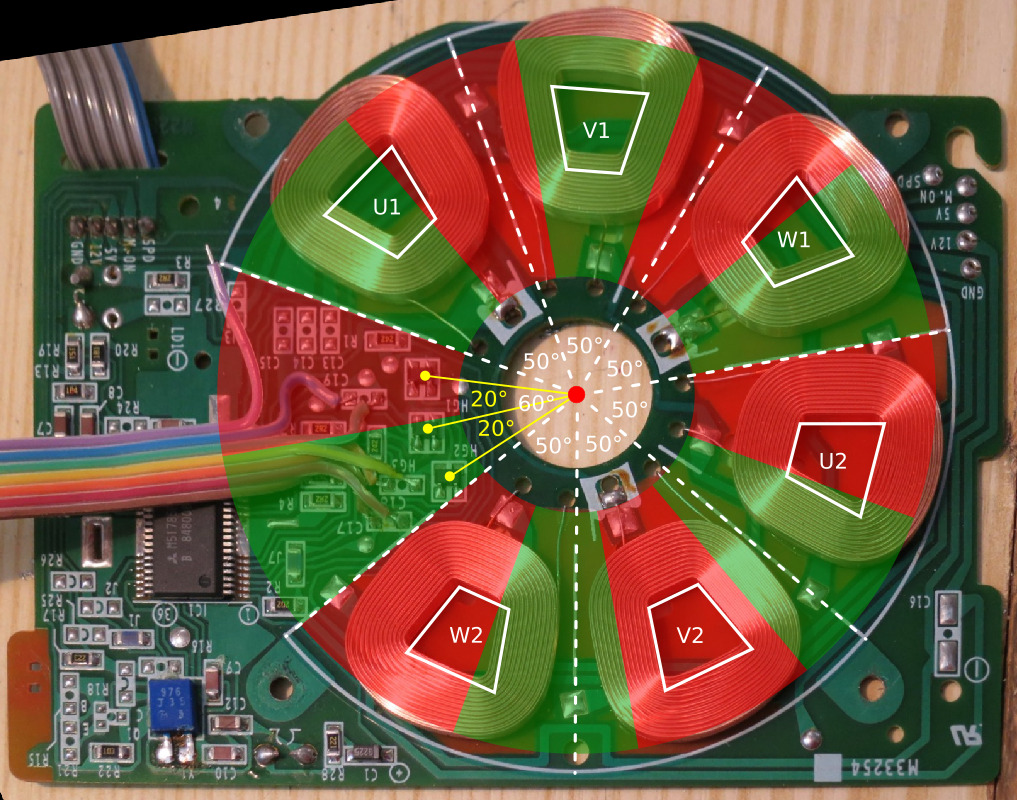
Martin O. schrieb: > Kann mir jemand sagen wieviele Pole dann der Rotor hat ? 12 Pole bzw. 6 Polpaare. Den entscheidenden Hinweis liefern die Hall-Sensoren, die im Abstand von jeweils 20° angeordnet sind. Die gestrichelten weißen Linien entsprechen den auf der Platine aufgedruckten Sektorlinien und haben einen Abstand von 50° zueinander (Ausnahme: Der Abstand der Linien an der Lücke auf der linken Seite ist 60°). Der Abstand zwischen den Spulen ist damit ebenfalls 50° (an der Lücke sind es 110°). Der Abstand zwischen zwei Polen des Rotors ist der 1,5-fache Hall-Sensorabstand, also 30°. 3 Spulenabstände (also bspw. der Abstand zwischen U1 und U2) entsprechen somit exakt 5 Rotorpolabständen, nämlich 150°. Da 5 eine ungerade Zahl ist, müssen die Spulen [UVW]2 jeweils entgegengesetzt zu [UVW]1 gepolt (d.h. andersherum angeschlossen) sein. Anmerkung: Die weiß eingezeichneten Trapeze sind die Spulenpositionen auf der Platinenebene. Durch den Parallaxeneffekt (das Originalbild wurde aus einem schrägen Winkel aufgenommen) sind die erhöhten Spulenoberflächen gegenüber den weißen Trapezen etwas verschoben.
> Den entscheidenden Hinweis
... würde eine Identifizierung der Magnetfeldrichtung entlang des Rotors
liefern, nicht irgendwelche Striche auf dem Stator.
:
Bearbeitet durch User
Bradward B. schrieb: >> Den entscheidenden Hinweis > > ... würde eine Identifizierung der Magnetfeldrichtung entlang des Rotors > liefern, Natürlich würde es das. Schreib also nicht im Konjunktiv, sondern schreite zur Tat: Besorge dir ein Chinon FZ-506, identifiziere die Magnetfeldrichtung entlang des Rotors und bestätige damit meine obigen Überlegungen. Solche Laufwerke sind u.a. auf Ebay zu finden, teilweise umgelabelt als Cumana (damals für den BBC Micro von Acorn). Beachte aber, dass es von dem FZ-506 verschiedene Revisionen gibt, die sich intern von dem Exemplar hier im Thread unterscheiden. Wenn man kein entsprechendes Laufwerk zu Hand hat, hilft Nachdenken weiter. Das vom TE verlinkte Bild liefert ausreichend Input dafür. > nicht irgendwelche Striche auf dem Stator. Die aufgedruckten Striche habe ich nur als Hilfsmittel zur Bestimmung der Winkelpositionen der Spulen herangezogen, da dies auf direktem Weg wegen der speziellen Form der Spulen und der perspektivischen Verzerrung im Bild schwierig und ungenau ist. Dabei ging ich davon aus, dass die Spulen mittig zwischen jeweils zwei Linien platziert sind und somit denselben Winkelabstand zueinander haben wie die Linien. Wenn man alleine die Positionen der Hall-Sensoren betrachtet, könnte der Rotor auch 12, 24, 30, 42, … (allgemein: 6·(3n+1) oder 6·(3n+2), n ∈ ℕ₀) Polpaare haben. Dann wäre aber der Winkelabstand zwischen den Polen kleiner als der halbe Winkelabstand zwischen den Spulen, was zu einem deutlichen Drehmomentverlust führen würde, ohne an anderer Stelle nennenswerte Vorteile zu bieten. Deswegen habe ich diese Möglichkeiten ausgeschlossen.
Anbei der Grundlagenartikel zu BLDC aus einer alten make (2013/03). Dieser Artikel fokussiert auf Copter, also Motoren bei denen es mehr auf Kraft denn auf Positioniergenauigkeit ankommt. Darin wird beschrieben, das man mit einem einzigen Hall-Sensor auskommt oder auch auf diesen verzichten kann. Deshalb kann man skeptisch sein, ob sich aus der Lage der/des (vermuteten) Hallsensors Rückschlüsse auf den weiteren mechanischen Aufbau ziehen lassen, insbesonders ohne die konkrete Schaltung/Regelungstechnik zu kennen. Ja, der Motor dort (Außenläufer) unterscheidet sich im Aufbau von dem des TO (Danke für's Herausziehen des Bildes aus dem TO-Link). Insbesonders die Lücke in der Anordnung der Statorspulen ist im ursprünglichen Sinne bemerkenswert. Da ein kurzer Artikel zu Hallsensoren im BLDC, muss man sich mal in Ruhe zur Brust nehmen: https://www.digikey.de/de/blog/using-bldc-hall-sensors-as-position-encoders-part-1?srsltid=AfmBOoqBldDxnf6c0MohcZtFbI9QqOp9qSrGD3ahLASSuq-Uy4ffRH4q
:
Bearbeitet durch User
Bradward B. schrieb: > Darin wird beschrieben, das man mit einem einzigen Hall-Sensor auskommt > oder auch auf diesen verzichten kann. Dass ein BLDC-Motor auch sensorlos betrieben werden kann, bedeutet nicht, dass bei der Kommutierung mittels Hall-Sensoren deren Anordnung beliebig ist. Der in dem Laufwerk verbaute Motortreiber M51785 braucht jedenfalls drei Hall-Sensoren für die Kommutierung, und diese müssen so positioniert sein, dass sie drei um jeweils 120° phasenversetzte Signale liefern. Bei ungenauer oder falscher Positionierung läuft der Motor unrund oder überhaupt nicht. Andere Motortreiber, wie bspw. der KA2822 kommen mit zwei Hall-Sensoren aus und generieren aus den beiden Signalen das dritte synthetisch: Torsten B. schrieb: > Richi hat eine 3,5"-Floppy (Samsung SFD-321B) analysiert, allerdings > kein Wort zum Rotor-Magneten. https://www.richis-lab.de/floppy.htm Das setzt allerdings voraus, dass die Sensorsignale halbwegs sinusförmig sind. Die Verwendung von drei Sensoren hingegen ist völlig unkritisch. Bei sensorlosem Betrieb wird meist die EMF des Motors zu Bestimmung der Rotorposition heranzgezogen. Eine auswertbare EMF ensteht aber erst ab einer gewissen Mindestdrehzahl. Unterhalb davon betreibt man den Motor als Synchronmotor, womit aber nur ein bescheidenes Drehmoment erreicht wird. Das ist beim Antrieb eines Luftpropellers kein Problem, da dessen Anlaufmoment nahezu null ist. Dasselbe gilt für rotierende Festplatten. Dass die rotierende Masse wegen des begrenzten Drehmoments nur recht langsam beschleunigt werden kann, ist hier kein großes Problem. Bei einem Diskettenlaufwerk hingegen muss beim Anlaufen die Haftreibung zwischen dem rotierenden Medium und der Diskettenhülle überwunden werden. Ein mit Hall-Sensoren kommutierter Motor erzeugt das maximale Drehmoment bereits ab Drehzahl 0 und ist daher für diese Anwendung bestens geeignet. Hall-Sensoren sind auch nicht so wahnsinnig teuer, dass man sie deswegen unbedingt einsparen müsste.
Hab mal dem Ursprungsartikel nachgegraben, findet sich dort: https://martin-jones.com/page/5/ Sehr weit unten, unter der Überschrift: "Repairing a floppy disc drive". Text dabei ist u.a. "The motor is controlled by a Mitsubishi M51785P motor controller chip. The chip’s data sheet revealed that the motor has three phases, each of which has a coil to drive the rotor round and a hall effect sensor for feedback. This particular one is arranged with two coils per phase, but occupying 6/7 of a revolution, so the motor goes more slowly than the chip is driving it. ... Here’s a closeup of the circuit board. You can see the six coils, and the coloured wires I soldered on to measure things while the motor was running." Bei der Anordnung der Hall-Sensoren irritiert das sie nicht im gleichen Abstabd zur Drehachse montiert ist. Wenn der Rotor als Anordnung von Stabmagneten auf einer einer Kreislinie verstanden wird, ist der Punkt der höchsten Feldstärke direkt unter dieser Kreislinie.
Angehängte Dateien:
-

hall-sensoren.jpg
100 KB
{kind=link}
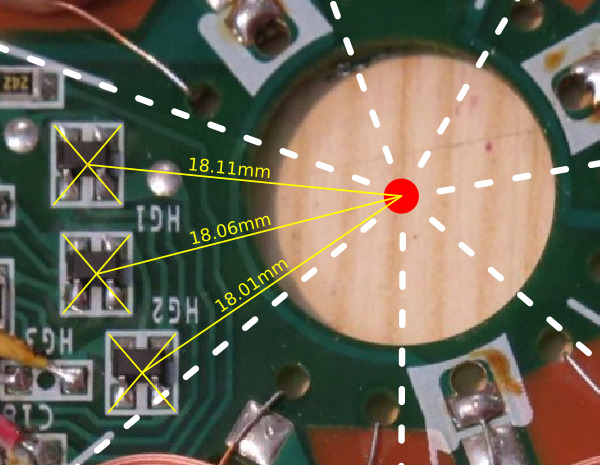
Bradward B. schrieb: > Bei der Anordnung der Hall-Sensoren irritiert das sie nicht im gleichen > Abstabd zur Drehachse montiert ist. Ich glaube, ±0,05 mm Toleranz sollte man dem Hersteller des Laufwerks zugestehen (s. Anhang), zumal in diesem Fehler auch die Verzeichnung der Kamera enthalten ist. > Wenn der Rotor als Anordnung von Stabmagneten auf einer einer > Kreislinie verstanden wird, ist der Punkt der höchsten Feldstärke > direkt unter dieser Kreislinie. Der Rotor enthält keine Stabmagnete, sondern einen einzelnen, ringförmigen Magneten mit entsprechender Magnetisierung. Dieser ist breit genug, um sowohl die Spulen als auch die Hall-Sensoren zu überdecken: https://martin-jones.com/wp-content/uploads/2014/04/img_6340.jpg
{kind=link}
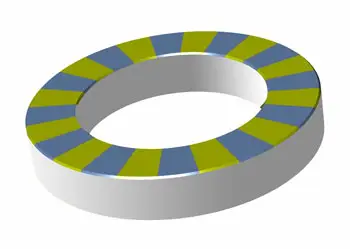
>> Bei der Anordnung der Hall-Sensoren irritiert das sie nicht im gleichen >> Abstabd zur Drehachse montiert ist. Optische Verzerrung ist hier ein starkes Argument, das aber eigentlich dazu führen würde, das man an einem solchen Bild (vorsichtshalber) garnichts misst, höchstens zählt. > Der Rotor enthält keine Stabmagnete, sondern einen einzelnen, > ringförmigen Magneten mit entsprechender Magnetisierung. Ja, das ist bekannt, gemeint ist eher das Modell eines Stabmagneten, das erklärt das das Magnetfeld an den "Stirnseiten" (also auf der Kreislinie. resp Tangential dazu) am stärksten ist. Hier spricht man wohl eher von "Segmenten" und dann eben, das an der Stelle an der die "Segmente" "aneinanderstoßen" die magnetische Feldstärke am höchsten ist. Da würde jetzt mal die Herstellung eines solchenen (Multipol)-Ringmagneten mit mehreren Segmenten interessieren. https://www.dextermag.com/wp-content/uploads/2016/10/Multipole_Magnet_Ring.webp Die Vermutung ist, die "Magnet-Segmente" werden zum Anschluss durch einen passend konstruierten, starken E-Magnet" "aufgeprägt". Oder "klebt" man da tatsächlich (vormagnetisierte) Segmente zusammen ?!
{kind=link}
:
Bearbeitet durch User
Bradward B. schrieb: > Die Vermutung ist, die "Magnet-Segmente" werden zum Anschluss durch > einen passend konstruierten, starken E-Magnet" "aufgeprägt". > Oder "klebt" man da tatsächlich (vormagnetisierte) Segmente zusammen ?! Man hat ein passend gebogenes Drahtgebilde. Eine Windung, ca 2 mm Drahtdurchmesser. Da jagt man einen Stromstoß von einigen 100 A aus einer Kondensatorbatterie durch. Das schreibt alle Pole auf einmal.
Bradward B. schrieb: > Da würde jetzt mal die Herstellung eines solchenen > (Multipol)-Ringmagneten mit mehreren Segmenten interessieren. Wenn Du mit "Herstellung" die Magnetisierung meinst, dann kann Dir geholfen werden: https://magnete.de/wissenswertes/magnetisierung-von-dauermagneten/ ganz unten, rechts. Grüßle, Volker
Bradward B. schrieb: > Optische Verzerrung ist hier ein starkes Argument, das aber eigentlich > dazu führen würde, das man an einem solchen Bild (vorsichtshalber) > garnichts misst, höchstens zählt. Verzerrung des Originalbilds Sie entsteht dadurch, dass die Kamera die Platine nicht mittig von oben, sondern leicht schräg von der Seite betrachtet. Dadurch erscheint die Platine nicht als Rechteck, sondern als unregelmäßiges Viereck. Diese (perspektivische) Verzerrung habe ich vor der weiteren Analyse beseitigt, so dass alles, was in der Ebene der Platinenoberseite liegt (insbesondere der Bestückungsdruck), maßstabsgetreu dargestellt wird. Vergleiche dazu die beiden Bilder: Original: https://martin-jones.com/wp-content/uploads/2014/04/img_6338.jpg Nach Beseitigung der (perspektivischen) Verzerrung: https://www.mikrocontroller.net/attachment/678908/floppy-motor.jpeg Verzeichnung Sie entsteht durch das nicht ganz perfekte Kameraobjektiv und führt dazu, dass die Platine auch nach der perspektivischen Entzerrung ganz leicht bauchig erscheint (tonnenförmige Verzeichnung) und macht sich vor allem an den Bildrändern bemerkbar. In der Bildmitte (da, wo ich die Winkel- und Längenmessungen vorgenommen habe) ist sie vernachlässigbar. Deswegen habe ich nicht versucht, sie zu beseitigen. In dem maßstabsgetreuen Bild ist es legitim, Winkelmessungen vorzunehmen und Abstände zwischen Objekten im Bild untereinander zu vergleichen. Bei den absoluten Längenmessungen (Abstände der Hall-Sensoren von der Motorachse in mm) spielt zusätzlich der genaue Maßstab (in mm/Pixel) eine Rolle. Um diesen zu ermitteln, habe ich mich am IC (M51785P) orientiert, das einen bekannten Pin-Abstand von 0,8 mm hat. Natürlich sind die Längenmessungen auf diese Weise nicht auf 0,01 mm genau, wie es mein letztes Bild vielleicht suggerieren mag. Ich habe die zwei Nachkommastellen nur angegeben, um deutlich zu machen, dass die Abstände der Hall-Sensoren von der Motorachse zwar etwas verschieden sein mögen, der Unterschied aber so gering ist, dass er die Funktion des Motors in keiner Weise beeinträchtigt. Hier ist noch ein Artikel zum Unterschied zwischen Verzerrung und Verzeichnung: https://de.wikipedia.org/wiki/Verzeichnung^
{kind=link}
:
Bearbeitet durch Moderator
>> Optische Verzerrung ist hier ein starkes Argument, das aber eigentlich >> dazu führen würde, das man an einem solchen Bild (vorsichtshalber) >> garnichts misst, höchstens zählt. > > Verzerrung des Originalbilds Ja genau, auch perspektivische Verzerrung genannt, das ist gemeint. Sieht man ganz gut an den Bohrungen, da ist links oben die Innenwand bei 11 Uhr sichtbar, bei denen rechts unten eher nicht. OK der Schattenwurf ist sub-Optimal, ohne den Schatten sehen die Kreiser runder aus. Ist halt eine Aufnahme aus der freien Hand und nicht an einem ausgerichteten Fotografierstand mit Stativ o.ä.. Andere Betrachtungsweise, wie korreliert die Segmentierung des Magneten mit der Segmentierung der Diskette. Es gab ja da in der Vergangenheit Floppies mit acht und manche mit neun - Unterscheiden sich diese Laufwerke auch in der Anordnung der Sensoren ? https://thejpster.org.uk/blog/blog-2023-08-28/#a-comparison-table
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.