1 | void FLEXCAN1_init(void)
|
2 | {
|
3 | #define MSG_BUF_SIZE 4 /* Msg Buffer Size. (CAN 2.0AB: 2 hdr + 2 data= 4 words) */
|
4 | uint32_t i=0;
|
5 |
|
6 | PCC->PCCn[PCC_FlexCAN1_INDEX] |= PCC_PCCn_CGC_MASK; /* CGC=1: enable clock to FlexCAN1 */
|
7 |
|
8 | CAN1->MCR |= CAN_MCR_MDIS_MASK; /* MDIS=1: Disable module before selecting clock */
|
9 | CAN1->CTRL1 &= ~CAN_CTRL1_CLKSRC_MASK; /* CLKSRC=0: Clock Source = SOSCDIV2 */
|
10 | CAN1->MCR &= ~CAN_MCR_MDIS_MASK; /* MDIS=0; Enable module config. (Sets FRZ, HALT) */
|
11 |
|
12 | while (!((CAN1->MCR & CAN_MCR_FRZACK_MASK) >> CAN_MCR_FRZACK_SHIFT)) {}
|
13 | CAN1->CTRL1 = 0
|
14 | |CAN_CTRL1_PSEG2(3) /* Configure for 500 KHz bit time */
|
15 | |CAN_CTRL1_PSEG1(3) /* Time quanta freq = 16 time quanta x 500 KHz bit time= 8MHz */
|
16 | |CAN_CTRL1_PROPSEG(6) /* PRESDIV+1 = Fclksrc/Ftq=8 MHz/8 MHz*/
|
17 | |CAN_CTRL1_RJW(3) /* so PRESDIV = 0 */
|
18 | |CAN_CTRL1_SMP(1); /* PSEG2 = Phase_Seg2 - 1 = 4 - 1 = 3 */
|
19 | /* PSEG1 = PSEG2 = 3 */
|
20 | /* PROPSEG= Prop_Seg - 1 = 7 - 1 = 6 */
|
21 | /* RJW: since Phase_Seg2 >=4, RJW+1=4 so RJW=3. */
|
22 | /* SMP = 1: use 3 bits per CAN sample */
|
23 | /* CLKSRC=0 (unchanged): Fcanclk= Fosc= 8 MHz */
|
24 |
|
25 | for(i=0; i<64; i++ )
|
26 | { /* CAN1: clear 16 msg bufs x 4 words/msg buf = 64 words */
|
27 | CAN1->RAMn[i] = 0; /* Clear msg buf word */
|
28 | }
|
29 | for(i=0; i<16; i++ )
|
30 | { /* In FRZ mode, init CAN1 16 msg buf filters */
|
31 | //CAN1->RXIMR[i] = 0xFFFFFFFF; /* Check all ID bits for incoming messages */
|
32 | CAN1->RXIMR[i] = 0x00000000; /* Check No ID bits for incoming messages */
|
33 | }
|
34 | //CAN1->RXMGMASK = 0x1FFFFFFF; /* Global acceptance mask: check all ID bits */
|
35 | CAN1->RXMGMASK = 0x00000000; /* Global acceptance mask: check no ID bits */
|
36 |
|
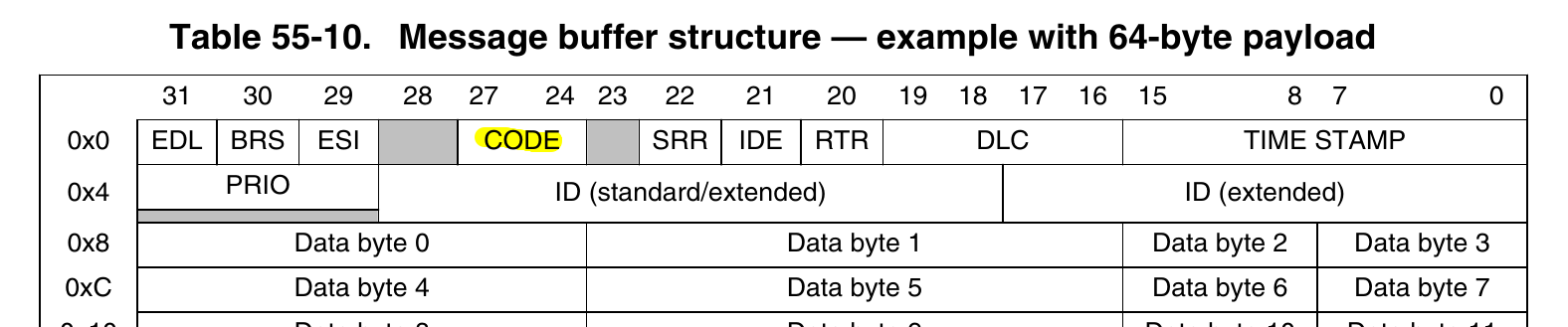
37 | CAN1->RAMn[ 4*MSG_BUF_SIZE + 0] = 0x04000000; /* Msg Buf 4, word 0: Enable for reception */
|
38 | /* EDL,BRS,ESI=0: */
|
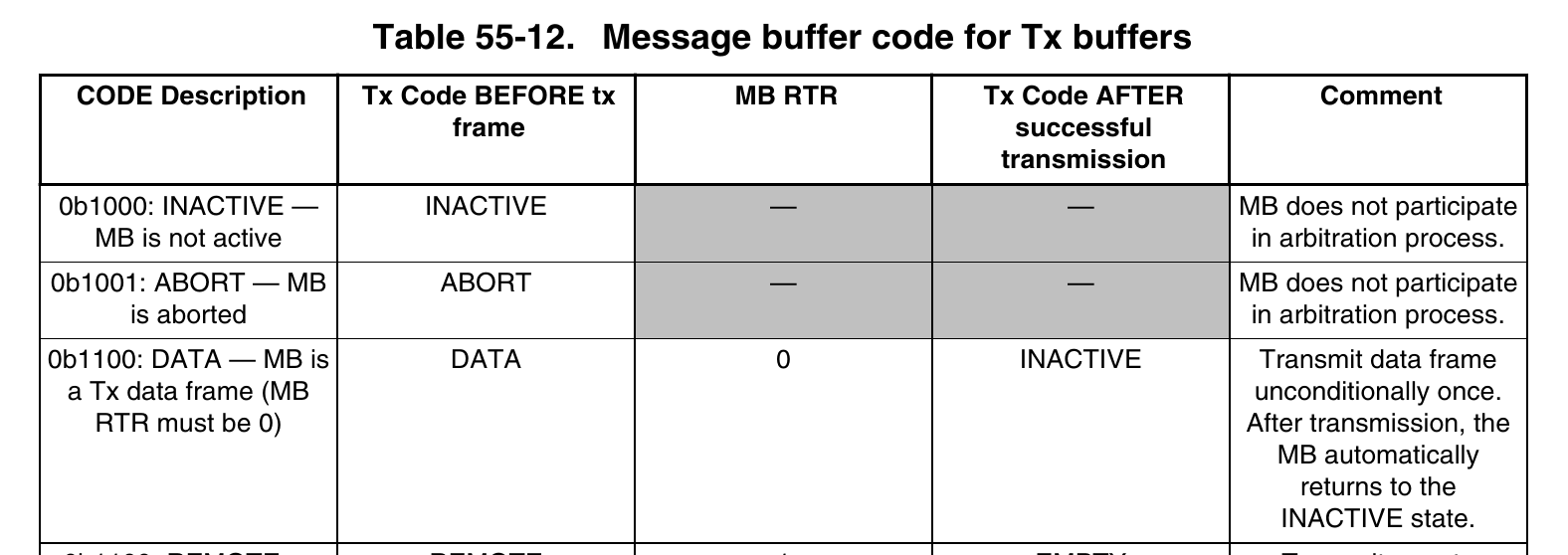
39 | /* CODE=4: */
|
40 | /* IDE=0 */
|
41 | /* SRR, RTR, TIMESTAMP=0*/
|
42 |
|
43 | CAN1->RAMn[ 4*MSG_BUF_SIZE + 1] = 0x14440000;
|
44 | /* Msg Buf 4, word 1*/
|
45 | /* PRIO=0: CANFD not used */
|
46 |
|
47 | CAN1->MCR = 0x0000001F; /* Negate FlexCAN 1 halt state for 32 MBs */
|
48 |
|
49 | while ((CAN1->MCR && CAN_MCR_FRZACK_MASK) >> CAN_MCR_FRZACK_SHIFT) {}
|
50 | /* Good practice: wait for FRZACK to clear (not in freeze mode) */
|
51 |
|
52 | while ((CAN1->MCR && CAN_MCR_NOTRDY_MASK) >> CAN_MCR_NOTRDY_SHIFT) {}
|
53 | /* Good practice: wait for NOTRDY to clear (module ready) */
|
54 | }
|
55 |
|
56 |
|
57 | void FlexCAN1SendCanData(uint16_t id_u8, uint8_t* data_pu8, uint8_t lenght_u8)
|
58 | {
|
59 | uint32_t word0 = 0;
|
60 | uint32_t word1 = 0;
|
61 | uint32_t word2 = 0;
|
62 | uint32_t word3 = 0;
|
63 |
|
64 | word0 = 0x0C400000 | (8 << CAN_WMBn_CS_DLC_SHIFT); /* MB0 word 0 */
|
65 | /* bit 31: EDL=0*/
|
66 | /* bit 30: BRS=0*/
|
67 | /* bit 29: ESI=0*/
|
68 | /* bit 27-24: CODE=0xC*/
|
69 | /* bit 22: SRR=1 */
|
70 | /* bit 21: IDE=0 */
|
71 | /* bit 20: RTR=0*/
|
72 | /* bit 19-16: DLC=8*/
|
73 | /* bit 15-0: TIMESTAMP */
|
74 | word1 = ((uint32_t)id_u8 << 18); /* MB0 word 1 */
|
75 | /* Tx msg with STD ID */
|
76 | /* bit 31-29: PRIO = 0 */
|
77 | /* bit 28-18: ID (standard) */
|
78 | /* bit 17-0: ID (extended) */
|
79 |
|
80 | word2 = ((uint32_t)data_pu8[0] << 24)
|
81 | | ((uint32_t)data_pu8[1] << 16)
|
82 | | ((uint32_t)data_pu8[2] << 8)
|
83 | | ((uint32_t)data_pu8[3] << 0); /* MB0 word 2 */
|
84 | word3 = ((uint32_t)data_pu8[4] << 24)
|
85 | | ((uint32_t)data_pu8[5] << 16)
|
86 | | ((uint32_t)data_pu8[6] << 8)
|
87 | | ((uint32_t)data_pu8[7] << 0); /* MB0 word 3 */
|
88 |
|
89 |
|
90 | CAN1->IFLAG1 = 0x00000001; /* Clear CAN 1 MB 0 flag without clearing others*/
|
91 | CAN1->RAMn[ 0*MSG_BUF_SIZE + 1] = word1;
|
92 | CAN1->RAMn[ 0*MSG_BUF_SIZE + 2] = word2;
|
93 | CAN1->RAMn[ 0*MSG_BUF_SIZE + 3] = word3;
|
94 | CAN1->RAMn[ 0*MSG_BUF_SIZE + 0] = word0; // CODE is written here to activate transmission
|
95 | }
|