Ich bin gerade dabei, eine Firmware für E-Bike Controller der Fa. Bafang zu schreiben. Über SWD geflasht funktioniert das bereits, es ist aber für Otto-Normal-User eine riesige Hürde, den Controller auseinanderzuschrauben, ggf. Vergussmasse wegzupulen um dann einen SWD Programmer anzuschließen. Bafang macht Firmwareupdates über CAN. Tool und Firmwarefiles findet man einfach im Internet. Jetzt möchte ich es ermöglichen, die offene Firmware über diesen Weg zu flashen. Da die Prozessoren nicht lesegeschützt sind, kann man sie leicht auslesen. Die offiziellen Update-Files werden 1:1 in den Flash-Speicher geschrieben, da ist also zum Glück nichts verschlüsselt. Das Programm startet offensichtlich an Adresse 0x08004000, auch wenn noch 32 Bytes davor geschrieben werden, die aber wohl nur zum Abgleich der Hardwareversion dienen. Ich habe mir jetzt gedacht, ich schreibe meine Firmware einfach an diese Startadresse und der Bootloader springt die dann schon an, leider rebootet der Prozessor so ständig. Im Bootloader blinkt eine LED auf dem Board nervös, daher kann man das schön sehen. :-( hier gibt es den Flash-Dump des Controllers, ein Bafang-Update-File und natürlich mein Projekt: https://github.com/stancecoke/BAFANG_HUB_GD32F303RCT6/commit/77195818d6f7622e33b4172cb34941b24be92ce8 Ich habe es mit einem anderen Bootloader probiert, da hat es funktioniert, das Verschieben der Startadresse und der Interrupt-Vektor Offset scheinen korrekt implementiert zu sein. Auch wenn es interessanterweise relevant ist, an welcher Stelle im Code der Interrupt-Vektor Offset gesetzt wird. Direkt als erstes nach dem int main(void){ geht es nicht, gleich am Anfang der SystemInit() Funktion geht es.... Hat jemand eine Idee, warum der Prozessor immer rebootet? Ist das eher ein Bug in meinem Programm, das ständig einen Reset auslöst, oder checkt der Bootloader irgendwie, ob eine bekannte Firmware vorliegt und wenn der Check fehlschlägt, wird rebootet? Gruß hochsitzcola
Hochsitz C. schrieb: > Hat jemand eine Idee, warum der Prozessor immer rebootet? Im Debugger geprüft ob dein Code (Reset_Handler) überhaupt gestartet wird? Erwartet der Bootloader eine Checksum (CRC)?
Genau, habe das schon irgendwo mal gelesen... hier (NationZ) Beitrag "Re: ALLPOWERS S2000 PRO Reparaturhilfe"
Niklas G. schrieb: > Im Debugger geprüft ob dein Code (Reset_Handler) überhaupt gestartet > wird? Ja, der Reset Handler wird angesprungen. https://github.com/stancecoke/BAFANG_HUB_GD32F303RCT6/blob/77195818d6f7622e33b4172cb34941b24be92ce8/gcc_startup/startup_gd32f30x_hd.S#L23 also wird es wohl nicht am Bootloader liegen, sondern an meinem Code liegen?
:
Bearbeitet durch User
Hochsitz C. schrieb: > also wird es wohl nicht am Bootloader liegen, sondern an meinem Code > liegen? Klingt so. Ist doch super, debugge es step-by-step und du siehst wo es rausfliegt. Ggf. direkt am Anfang vom Reset_Handler die Interrupts abschalten (cpsid i), eventuell macht der Bootloader das nicht und irgendeine aktivierte Peripherie löst einen Interrupt aus der ins Nirvana geht. Auch immer das VTOR im Auge behalten. Vielleicht ist auch Takt, Flash Wait States, ... Komisch konfiguriert vom Bootloader was dein Programm nicht mag.
Ich werde wohl erst mal mit einem einfachen Blink-Beispiel anfangen, um zu schauen, ob das prinzipiell läuft, oder doch irgendwie der Bootloader reinspuckt.
Das war leider nicht erfolgreich. Ich habe ein ganz einfaches Programm geflasht, daß einfach nichts tut, nur eine Endlosschleife ohne weitere Aktivität, auch dann rebootet der Prozessor ständig. Scheint also doch irgendeine Abfrage vom Bootloader zu sein. Wie kann man so etwas auf die Spur kommen? Ich bekomme auch den ständigen Neustart mit dem Debugger gar nicht angehalten...
:
Bearbeitet durch User
In den RCU_RSTSCK Flags prüfen, ob ein Watchdog den Reset ausgelöst hat. Wenn da ein Watchdog aktiviert ist muss der ge-serviced werden.
Hm, der Watchdog scheint es nicht zu sein. Der Zähler WWDGT_CTL steht immer auf 127, was der Default-Wert zu sein scheint. RCU_RSTSCK hat den Wert 2, also nur das Signal, daß der Takt stabil ist.... https://download.gigadevice.com/User_Manual/GD32F30x_User_Manual_Rev3.4.pdf
Hardware Watchdog auf der Platine vielleicht ?
Der müsste ja auch anspringen, wenn ich meine Firmware von 0x08000000 starte, da läuft sie aber problemlos. Ich habe auch das WWDGT_HOLD Flag im DBG_CTL0 Register gesetzt, der Prozessor bootet trotzdem ständig neu auf wenn der Debugger auf Pause steht :-(
Hochsitz C. schrieb: > RCU_RSTSCK hat den Wert 2, also nur das Signal, daß der Takt stabil > ist.... Das lässt sich imo aber nur so erklären, dass der Bootloader die Flags löscht. Zumindest PORRSTF sollte sonst ja gesetzt sein. Zusätzlicher Hardware-watchdog ist bei einem E-Bike-Controller schon auch denkbar. Ansonsten mal Breakpoints an den Anfang von allen Exception Handlern streuen und den Bootloader entry point. Mit letzterem kann man dann auch die ungelöschten Reset Flags in RCU_RSTSCK abgreifen.
Benedikt H. schrieb: > und den Bootloader entry point. Da muss ich erst mal schauen, wie man das mit Open GDB macht, ich debugge aus dem Eclipse-basierten GDEmbeddedBuilder
Niklas G. schrieb: > Adresse des Reset Handler des Bootloaders angeben Wie bekomme ich die heraus?!
:
Bearbeitet durch User
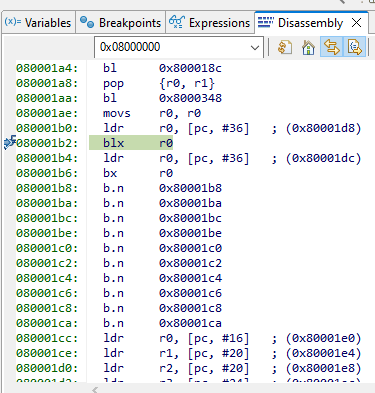
Hochsitz C. schrieb: > Wie bekomme ich die heraus?! Steht im Interrupt-Vektor an Stelle 1, d.h. in Bytes 4-7 des binary Image. Little Endian natürlich.
Danke, das wäre 0x080001B1, dann probiere ich das mal...
Hochsitz C. schrieb: > 0x080001B1 Probier ggf. 0x080001B0, hab nicht im Kopf ob es mit 0x080001B1 geht beim GDB. Die tatsächliche Adresse ist natürlich immer gerade, das unterste Bit wird bei Sprungzielen (wie hier im Interrupt-Vektor) auf 1 gesetzt und anzuzeigen dass dort Thumb-Code liegt. Beim Cortex-M eine gerade Adresse anzugspringen ist übrigens auch ein Grund für einen Crash, weil die CPU den "ARM" Code nicht unterstützt.
:
Bearbeitet durch User
Angehängte Dateien:
-

Sceenshot.PNG
17 KB
Ich krieg den Breakpoint hin, aber kann in diesem Zustand den RCU_RSTSCK nicht lesen, in den Expressions wird der Wert nur angezeigt, wenn der Breakpoint im eigenen Code liegt. Das geht doch alles deutlich über das hinaus, was ich bisher mit Mikrocontrollern gemacht hab :-)
Hochsitz C. schrieb: > aber kann in diesem Zustand den RCU_RSTSCK nicht lesen Auf der GDB Konsole: x/1xw 0x123... Adresse des gewünschten Registers angeben.
In der Eclipse gibt's da die Debug Console oder evtl geht's über Variables/Expressions
Thomas W. schrieb: > In der Eclipse gibt's da die Debug Console oder evtl geht's über > Variables/Expressions Die diversen IDEs zicken da manchmal und wollen sowas nicht ausgeben, warum auch immer. Wenn man direkt die GDB-Befehle eingeben kann umgeht man das
Angehängte Dateien:
-

Sceenshot1.PNG
21 KB
für RCU_RSTSCK wird volatile uint32_t *)(uint32_t)((((uint32_t)0x40018000U) + 0x00009000U) + 0x24U))angezeigt, sollte also 0x40021024 sein. aber das klappt irgendwie nicht... Das ganze Debuggen aus der Kommandozeile starten würde vielleicht besser gehen?
:
Bearbeitet durch User
Hochsitz C. schrieb: > aber das klappt irgendwie nicht... Adresse ist falsch eingegeben (0x04... Statt 0x40...). Die CPU ist nicht angehalten? Klingt als wäre es bereits abgestürzt/neugestartet? Passiert das so auch wenn du nur dein Programm "normal" geflasht hast, und genau so direkt im Reset_Habdler angehalten? Ist die Spannungsversorgung stabil? Debuggen und auch Flashen braucht viel Strom, wenn die Spannung einbricht startet der Controller neu und der Debugger fliegt raus. Alternativ mal nen besseren Debugadapter verwenden (J-Link oder so).
:
Bearbeitet durch User
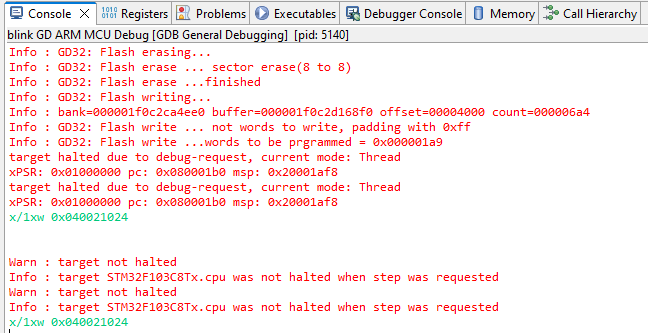
Der Debugger hält den Prozessor nicht an, die LED flackert immer weiter Ich hab den Befehl im falschen Fenster eingegeben. Im Fenster "Debugger Console" funkioniert es, aber keine neue Erkenntnis. x/1xw 0x40021024 0x40021024: 0x00000002 Das Debuggen meines Codes direkt ohne den Bootloader an Adresse 0x08000000 gestartet funktioniert einwandfrei.
:
Bearbeitet durch User
Hochsitz C. schrieb: > Der Debugger hält den Prozessor nicht an, die LED flackert immer weiter Da wird der Bootloader wohl das Debug Interface abschalten. Du könntest ganz am Anfang deiner software das Interface wieder einschalten und die BKPT Instruktion nutzen um das Programm garantiert anzuhalten.
Niklas G. schrieb: > Da wird der Bootloader wohl das Debug Interface abschalten. Hm, aber der Debugger kommt ja dazwischen um die Firmware zu flashen und die Session zu starten. auch mit einem __asm__("BKPT #01"); ganz am Anfang meines Codes rebootet der Prozessor fröhlich weiter xPSR: 0x61000000 pc: 0x080066ba msp: 0x20001354 target halted due to breakpoint, current mode: Thread xPSR: 0x61000000 pc: 0x080066ba msp: 0x20001354 target halted due to breakpoint, current mode: Thread xPSR: 0x61000000 pc: 0x080066ba msp: 0x20001354 target halted due to breakpoint, current mode: Thread xPSR: 0x61000000 pc: 0x080066ba msp: 0x20001354 target halted due to breakpoint, current mode: Thread xPSR: 0x61000000 pc: 0x080066ba msp: 0x20001354 target halted due to breakpoint, current mode: Thread xPSR: 0x61000000 pc: 0x080066ba msp: 0x20001354 target halted due to breakpoint, current mode: Thread Wie würde man denn das Debug interface wieder einschalten? Ich habe da keinen Befehl zu gefunden :-(
:
Bearbeitet durch User
Lade doch mal den kompletten Flash-Dump mit dem "Blink" Testprogramm hier hoch (also alles inklusive dem Bootloader).
:
Bearbeitet durch User
Bitte schön! Die erst Datei ist nur der Bootloader ... ich habe auch noch die original Firmware drangehangen, die nicht rebootet, wenn man sie an die Startadresse 0x08004000 flasht.
:
Bearbeitet durch User
Hochsitz C. schrieb: > Hm, aber der Debugger kommt ja dazwischen um die Firmware zu flashen und > die Session zu starten. Hochsitz C. schrieb: > xPSR: 0x61000000 pc: 0x080066ba msp: 0x20001354 > target halted due to breakpoint, current mode: Thread > xPSR: Aber 0x080066ba ist doch gar nicht die Reset Handler Adresse vom Bootloader? Da wird nicht richtig unterbrochen. Der Stack Pointer sieht auch komisch aus. Du könntest versuchen im Original Bootloader Image die erste Instruktion durch BKPT zu ersetzen und dann im Bootloader manuell zu "emulieren". Dann durchsteppen und schauen wo es neu startet.
In einem ARM Simulator würde das Blink Programm aufgerufen, allerdings werden dabei eventuelle Beeinflussungen durch die Peripherie (IO) ignoriert. Im Bootloader findet man eine Funktion zum Berechnen einer 16-Bit CRC über den Bereich ab 0x8004000. Allerdings bin ich mir nicht sicher ob das eventuell nur beim Laden der Firmware über den CAN-Bus benutzt wird und dann nach dem Schreiben des Updates nicht mehr aufgerufen wird. Die 32 Byte vor 0x8004000 entsprechen den 32 Byte Header in der Firmware Update Datei, dort steht wohl auch die 16-Bit CRC (ab Offset 0x10 im Header), allerdings sind die Werte in der Firmware Update Datei und dann im Flash unterschiedlich. Auch hier ist noch nicht ganz klar warum das so ist. Gibt es denn ein offizielles Tool mit dem das Firmware Update durchgeführt wird? Dann könnte man versuchen das "Blink" Programm in eine Update Datei umzuwandeln und über das Update Tool zu schreiben. Die CRC Berechnung für die Firmware Update Datei kann man nachvollziehen und eine passende CRC in den Header schreiben. Nachtrag: Was auch noch wichtig ist: Der Bootloader startet den FWDGT ("Free watchdog timer") den muss man dann auch bedienen.
:
Bearbeitet durch User
Das Tool mit dem man die Firmware updaten kann, gibt es als Open Source https://endless-sphere.com/sphere/threads/bafang-canable-pro-master-discussion.128228/ Ich hatte die zwei Bytes 16 Bytes vor dem 0x8004000 von Hand gelöscht, das Original Programm läuft auch ohne. Wahrscheinlich wird da nur während des Firmwareupdates eine Checksumme geprüft. Wie wird denn der FWDGT bedient? Ich hatte mir nur das einzige Beispiel aus der GS Library angeschaut, das war nicht verdächtig... Der Zähler vom WWDGT_CTL steht immer auf 127 Kommt das hier her? https://github.com/zephyrproject-rtos/zephyr/blob/main/drivers/watchdog/wdt_fwdgt_gd32.c Das würde ja heißen, dass da ein RTOS läuft?
:
Bearbeitet durch User
Hochsitz C. schrieb: > Das würde ja heißen, dass da ein RTOS läuft? Möglich, wäre für den Bootloader aber recht ungewöhnlich.
Warum braucht es ein RTOS um periodisch einen Watchdog zu triggern? Der Booloader läuft im Prinzip in einem Loop und ruft dann immer wieder die Funktion zum Triggern des Watchdog auf. Probiere das halt auch mal in dem "Blink" Programm (0xAAAA nach FWDGT_CTL schreiben).
Hochsitz C. schrieb: > Wie wird denn der FWDGT bedient? Ich hatte mir nur das einzige Beispiel > aus der GS Library angeschaut, das war nicht verdächtig... Der Zähler > vom WWDGT_CTL steht immer auf 127 Schau ins & lese doch erstmal das User Manual und/oder nutze eine Internetsuche um ein Beispiel zu finden. Im User Manual unter 14.1.4. steht z.B.:
1 | CMD[15:0] Write only. Several different fuctions(sic!) are realized by writing these bits with different Values: |
2 | ... |
3 | 0xAAAA: Reload the counter |
Da steht also genau was du tun musst. Lies doch erstmal die vorhandene Doku und probiere aus ob das klappt. > Kommt das hier her? > https://github.com/zephyrproject-rtos/zephyr/blob/main/drivers/watchdog/wdt_fwdgt_gd32.c Warum sollte das da her kommen? Generische non-window Watchdogs sind überhaupt nichts exotisches und ausserhalb von Arduino-Gebastel werden die auch genutzt wenn man halbwegs irgendwelche Safety-Anforderungen hat. Da braucht man kein Zephyr um einen Watchdog zu nutzen. Noch ein Nachtrag: > Ich bin gerade dabei, eine Firmware für E-Bike Controller der Fa. Bafang zu > schreiben. Vom Thread lesen hab ich ehrlich gesagt das Gefühl, dass du da etwas "out of your depth" bist, zumindest aber eine nicht so flache Lernkurve vor dir hast 😅
:
Bearbeitet durch User
Kleiner Teilerfolg, ich habe mir den falschen Watchdog angeschaut. Ich hatte nur den wwdgt auf dem Schirm, genutzt wird anscheinend der fwdgt. Wenn ich ganz zu Anfang meines Codes den Watchdog auf deutlich längere Zeiten setze, kommt der Reboot deutlich später
1 | fwdgt_config(65000, FWDGT_PSC_DIV256); |
aber das normale Programm, in dem ich den fwdgt in der Haupschleife und in den Interrupts mit fwdgt_counter_reload(); zurücksetze, läuft trotzdem nicht.... :-( Update: ich habe festgestellt, daß sich der Prozessor im ADCinit aufhängt. Konkret in der Funktion
1 | void delay_1ms(uint32_t count) |
2 | {
|
3 | delay = count; |
4 | |
5 | while(0U != delay){ |
6 | }
|
7 | }
|
Wenn ich das while auskommentiere, läuft die Hauptschleife, es kommt kein Reset mehr, aber es kommen keine Interrupts. Aber immerhin ein Fortschritt....
:
Bearbeitet durch User
so, Problem gelöst. Anscheinend deaktiviert der Bootloader die Interrupts. Mit
1 | nvic_vector_table_set(NVIC_VECTTAB_FLASH, 0x4000); |
2 | __enable_irq(); |
gleich am Anfang der main() läuft es jetzt. Vielen Dank für die hilfreichen Tipps! Bleibt noch herauszufinden, wie die Checksumme für das Flashen berechnet wird, damit über das Bafang Canable Tool keine Fehlermeldung kommt. Das Flashen funktioniert zwar, schließt aber mit einer Fehlermeldung ab.
:
Bearbeitet durch User
Hochsitz C. schrieb: > Bleibt noch herauszufinden, wie die Checksumme für das Flashen berechnet > wird, Wahrscheinlich nutzt der Bootloader die CRC-Peripherie des Controllers. Die implementiert CRC32 mit Ethernet Polynom. Leider ist nicht dokumentiert in welcher Reihenfolge die Bits verarbeitet werden, und ob Eingabe/Ausgabe invertiert ist. Das kannst du aber ziemlich simpel ausprobieren, da du ja ein Image mit korrekter CRC vorliegen hast. Versuch mal: - In C die crc32_z Funktion der zlib - In Python binascii.crc32 Probier alle Kombinieren aus: - Initialwert 0 oder 0xFFFFFFFF - Endergebnis invertiert oder nicht - Die Bits eines jeden 4-Byte-Words umgedreht Such im Bootloader Image mal nach 0x40023000 (Bytes tauschen für Little Endian), das ist die Adresse der CRC-Peripherie. Da drum herum könnte man den Algorithmus "ablesen".
:
Bearbeitet durch User
Ich habe hier bereits beschrieben dass der Bootloader die 16-Bit CRC berechnet. In der Firmware Update Datei "MMG522C4814F802010.1-CR X10N.510.FC 2.0 20240131.bin" (von Github https://github.com/stancecoke/BAFANG_HUB_GD32F303RCT6) ist die CRC 0xD20A (Datei Offset 0x10). Mit z.B. "reveng" kann man das so berechnen:
1 | reveng -w 16 -p 1021 -i 0000 -c -f firmware.bin |
"firmware.bin" ist dabei die eigentliche Firmware ohne den 32-Byte Header.
:
Bearbeitet durch User
Prima, Danke! Dann probiere ich mal aus, ob das Firmware Update so ohne Fehlermeldung klappt.
Dieter S. schrieb: > Ich habe hier bereits beschrieben dass der Bootloader die 16-Bit CRC > berechnet. Huh, kurios, verschenktes Potential - weniger effizient und weniger sicher als die Hardware CRC32 zu nutzen.
Angehängte Dateien:
-

Sceenshot2.PNG
45 KB
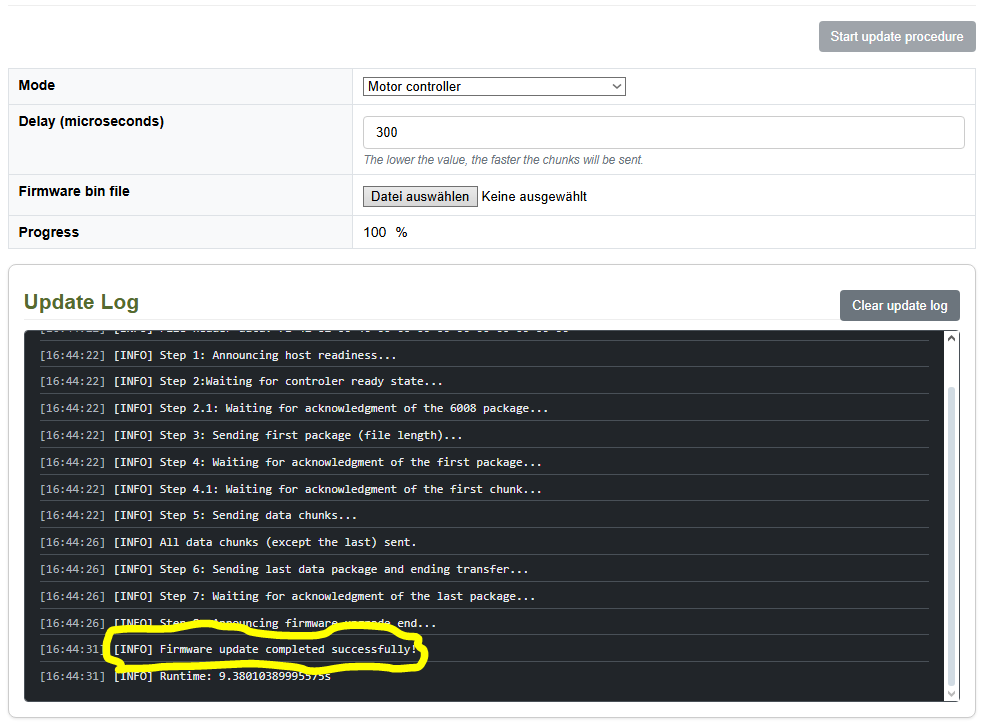
Dieter S. schrieb: > "reveng" kann man das so berechnen Hat funktioniert! Ich bin begeistert! Danke für die Unterstützung!
Angehängte Dateien:
-

Checksum.JPG
32 KB

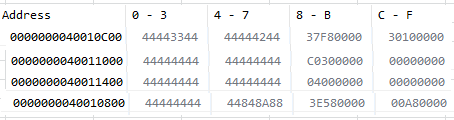
Dieter S. schrieb: > Mit z.B. "reveng" kann man das so berechnen: So, nachdem die Erstellung der Binärdateien jetzt für zwei verschiedene Bootloader problemlos geklappt hat, bin ich jetzt mit einem dritten Bootloader (vom Bafang M820) konfrontiert, der in den Bytes 14 und 15 offensichtlich eine zweite Checksumme erwartet. Die CRC16 an Bytes 16 und 17 wird berechenet wie oben schon herausgefunden. Kann jemand die Bytes 14 und 15 in dieser Datei zuordnen? https://github.com/EBiCS/BAFANG_GD32F303RCT6/raw/refs/heads/M560/documentation/Suche%20zweite%20Checksum.bin
:
Bearbeitet durch User
Hat sich geklärt, das ist die Anzahl der Bytes minus 2^16 https://endless-sphere.com/sphere/threads/fake-taxi-project-the-modified-original-firmware-for-bafang-m820-motor.129580/post-1888211
Hochsitz C. schrieb: > Hat sich geklärt, das ist die Anzahl der Bytes minus 2^16 Wahrscheinlich eher modulo 2^16, also die letzten vier Hexadezimal-Stellen.
Soul E. schrieb: > Wahrscheinlich eher modulo 2^16 Guter Hinweis, werde ich ausprobieren. Ich hatte schon befürchtet, mein Binary File künstlich mit 0xFFs auffüllen zu müssen, da mein compilierter Code gar nicht so groß ist!
So, nächstes Problem mit einem Bafang Bootloader. Ich habe jetzt einen Mittelmotor M820 auf der Werkbank. Der M820 ist ein kleiner schlanker Motor. Er hat den gleichen Prozessor, einen anderen Bootloader. Das Problem: Der Bootloader schaltet offensichtlich die Selbsthaltung der Spannungsversorgung wieder ab, so das diese im Code als erstes wieder eingeschaltet werden muß, damit der Controller nach dem Verlassen des Bootloaders und dem Anspringen des eigentlichen Codes (bei diesem Bootloader ab Adresse 0x08005000) weiterläuft. Ich habe mit trial and error alle verdächtigen Pins ein- und ausgeschaltet, aber keinen Erfolg gehabt. Ich habe mir auch alle Port-Stati angeschaut, bin damit aber auch nicht weiter gekommen. :-( Gibt es eine Strategie, wie man hier systematisch Vorgehen kann? Der Flash Dump vom Bootloader ist bei GitHub zu finden: https://github.com/EBiCS/BAFANG_GD32F303RCT6/blob/M820/documentation/M820_nur_Bootloader.bin
:
Bearbeitet durch User
Hochsitz C. schrieb: > Gibt es eine Strategie, wie man hier systematisch Vorgehen kann? Von der Seite der Spannungsversorgung rantasten. Ist da evtl. ein Hardware Watchdog im Spiel der ein PWM erwartet? Ich werfe mal einen TLE4271 in den Raum nur damit Du Dir darunter was vorstellen kannst (nutze ich in einem meiner Projekte) Beitrag "watch dog input von Spannungsregler TLE4271 im debug modus"
:
Bearbeitet durch User
Alexander schrieb: > Ist da evtl. ein Hardware Watchdog im Spiel der ein PWM erwartet? Der DC/DC ist ein EG1192L, der erzeugt die 12V Zwischenspannung, die 5V und 3.3V machen einfache Längsregler. https://jlcpcb.com/partdetail/EGMicro-EG1192L/C2987436 Ich werde mal versuchen, den Enable Pin vom DC/DC auf der Platine nachzuverfolgen
:
Bearbeitet durch User
Der Bootloader von https://github.com/EBiCS/BAFANG_GD32F303RCT6/blob/M820/documentation/M820_nur_Bootloader.bin benutzt auf den ersten Blick nur PB4, PB5 und PB12. Zusätzlich wird PA11 und PA12 konfiguriert, vermutlich für den CAN-Bus. Ich habe aber nur auf die Schnelle geschaut, daher ohne Garantie.
Dieter S. schrieb: > benutzt auf den ersten Blick nur PB4, PB5 und PB12. Das hört Sicht erst mal logisch an. PB5 schaltet die volle Akkuspannung auf das Display, PB12 ist die Onboard LED. PB4 schaltet auch bei den anderen Bootloadern bzw. der anderen Hardware die Versorgung ab, aber ich habe auch dort nicht herausgefunden, wie die Selbsthaltung eingeschaltet wird.
:
Bearbeitet durch User
PB4 wird beim Starten des Bootloaders auf 1 gesetzt, wenn der Bootloader aktiv war (z.B. Firmware Update) und dann nach 0x08005000 springt wird unter bestimmten Umständen (die Details habe ich mir noch nicht angeschaut) PB4 auf 0 gesetzt. Ruft der Booloader direkt 0x08005000 auf ohne weiter Aktion dann wird PB4 nicht auf 0 gesetzt. Wie schon weiter oben, ohne Garantie.
Angehängte Dateien:
-

Screenshot_GPIO_Register.PNG
2,5 KB
Dieter S. schrieb: > PB4 wird beim Starten des Bootloaders auf 1 gesetzt Ich habe mal in die GPIO Register geschaut, wenn der Bootloader läuft. Der Prozessor bleibt im Bootloader, wenn ich meine Firmware mit GDB mit 0x5000 offset starte. In diesem Zustand kann ich die Spannungsversorgung mit PB4 ein und ausschalten, wenn ich das Bit setzte/lösche. Wenn ich aber meinen Code direkt an die 0x080000000 schreibe und die Register exakt gleich setze, kommt und bleibt die Versorgungsspannung trotzdem nicht. Es scheint noch irgendeine andere Bedingung zu geben, damit die Versorgung anbleibt. :-(
Die GPIO-Reihenfolge beim Starten des Bootloaders ist: PB4 auf 1, dann PB5 auf 0 und am Ende PB12 auf 1. Das Ganze wird unmittelbar nach dem Reset vom Bootloader ausgeführt. Und, wie schon geschrieben, man kann nach dem Firmware Update den Bootloader wohl auch verlassen ohne dass PB4 auf 0 gesetzt wird.
:
Bearbeitet durch User
Dieter S. schrieb: > Die GPIO-Reihenfolge beim Starten des Bootloaders ist: PB4 auf 1, dann > PB5 auf 0 und am Ende PB12 auf 1. Ich habe es so implementiert, direkt nach der Initialisierung des Taktes.
1 | rcu_periph_clock_enable(RCU_GPIOB); |
2 | gpio_init(GPIOB, GPIO_MODE_OUT_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_12); |
3 | gpio_bit_set(GPIOB,GPIO_PIN_4); //set Pin4 (set by Bootloader on BL38) |
4 | gpio_bit_reset(GPIOB,GPIO_PIN_5); // Display Off |
5 | gpio_bit_set(GPIOB,GPIO_PIN_12); //LED off |
funktioniert aber leider nicht :-( Es muß wohl noch irgendwas anders gesetzt werden oder irgendwelche delays eingehalten?!
:
Bearbeitet durch User
Der Code für die GPIO Initialisierung des Bootloader steht ab 0x8000B8C. Die Funktion kann man direkt aufrufen (erwartet keine Parameter), vielleicht mal das direkte Aufrufen ausprobieren. Und wie schon geschrieben, direkt nach dem Reset, noch bevor irgend etwas anderes gemacht wird.
Dieter S. schrieb: > Die Funktion kann man direkt aufrufen (erwartet keine Parameter), Das geht ehrlich gesagt über mein Halbwissen. Von Decompilieren oder Deassemblieren habe ich keine Ahnung. :-(
Sollte in C eigentlich so funktionieren (auch wenn es kein schöner Code ist):
1 | void (*GPIO_init_bootloader)(void) = (void (*)(void))(0x8000B8C + 1); |
2 | GPIO_init_bootloader(); |
Ich denke aber dass das Problem eher daran liegt die GPIO Initialisierung nicht sofort nach dem Reset zu machen.
Dieter S. schrieb: > Ich denke aber dass das Problem eher daran liegt die GPIO > Initialisierung nicht sofort nach dem Reset zu machen Wie zwingt man denn den Compiler, die GPIO Initialisierung direkt nach dem Reset zu machen? Ich habe es schon direkt als ersten Befehl nach dem
1 | int main(void) |
2 | {
|
probiert...
Angehängte Dateien:
-

Selbsthaltung_M820.jpg
75 KB
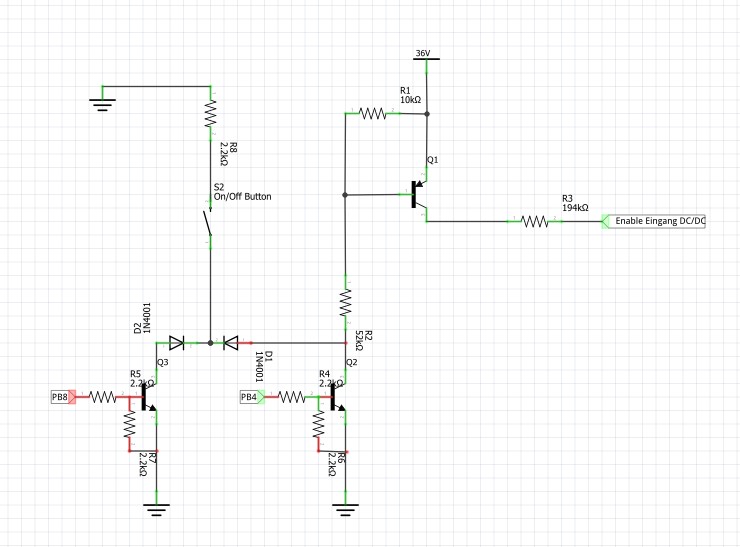
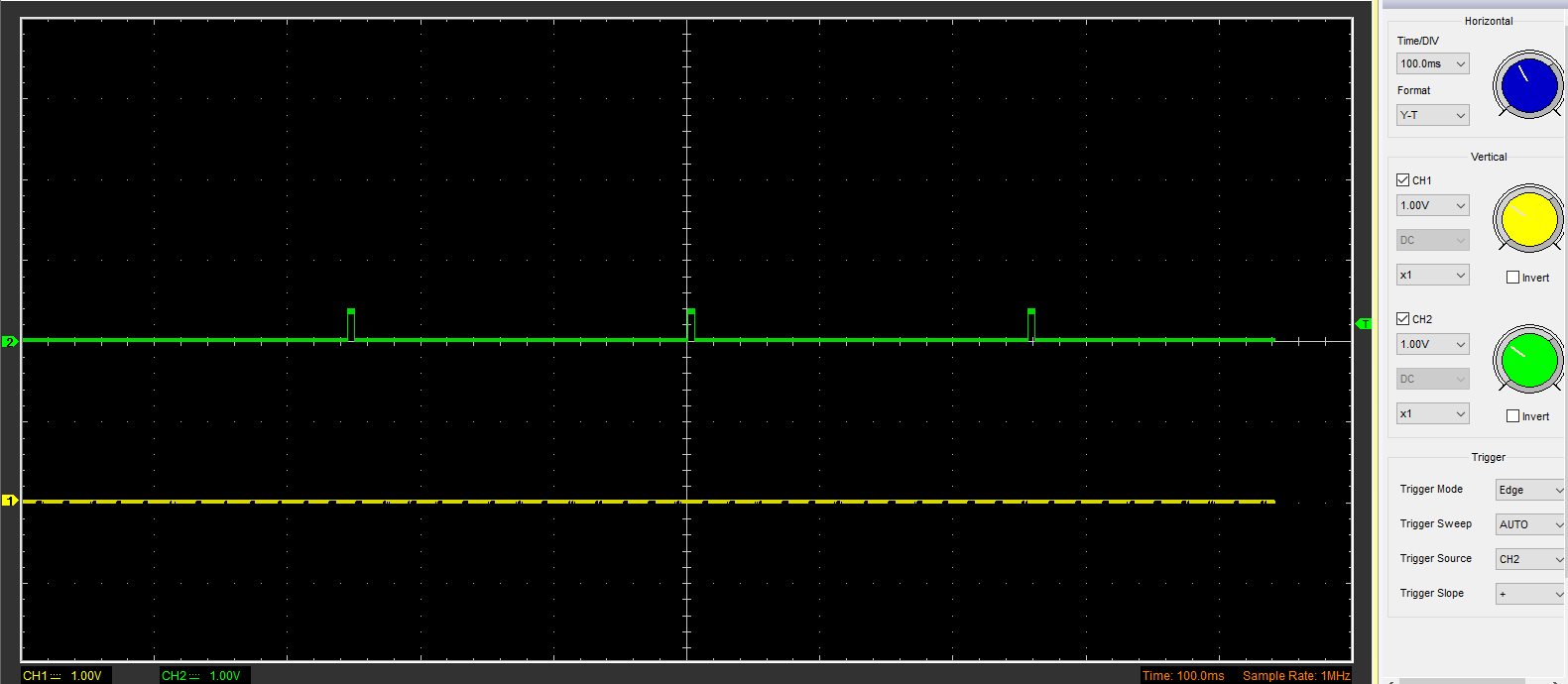
Alexander schrieb: > Ist da evtl. ein > Hardware Watchdog im Spiel der ein PWM erwartet? Hochsitz C. schrieb: > Ich werde mal versuchen, den Enable Pin vom DC/DC auf der Platine > nachzuverfolgen So, erstaunliche Erkenntnisse, aber leider keine Lösung. Mit dem originalen Bootloader hat PB4 kontinuierlich 3.3V, also high gesetzt. PB8 schickt alle 250ms einen 5ms langen High Puls. Wenn ich das in meiner Firmware nachbaue, zieht aber offensichtlich irgendwas die Signale von PB4 und PB8 auf ca. 0,3V runter, so daß die Selbsthaltung nicht funktioniert :-( In dem rückwärts entwickelten Schaltplan fehlt also offensichtlich noch irgendwas essentielles ...
Hochsitz C. schrieb: > Wenn ich das in meiner Firmware nachbaue, zieht aber offensichtlich > irgendwas die Signale von PB4 und PB8 auf ca. 0,3V runter, Funktioniert denn Dein Quellcode, GPIOB Clock enabled, als Output konfiguriert, andere Anfängerfehler?
Alexander schrieb: > Funktioniert denn Dein Quellcode, GPIOB Clock enabled, als Output > konfiguriert, andere Anfängerfehler? Ja, das ist alles korrekt. Den letzten Stand mit PB4 und PB8 habe ich noch nicht commited, aber die Intitialisierung ist OK. Die ganze Sensorik mit Einlesen und Ausgeben von Signalen funktioniert auch einwandfrei. https://github.com/EBiCS/BAFANG_GD32F303RCT6/blob/3656278eaa890d3de8aa06337c73ab4e6a93c21c/src/main.c#L578 Ich habe derzeit keine Idee, ob da analoge Hardware über irgendeine Zeitkonsante per Widerstand + Kondensator in die Suppe spuckt, oder doch noch ein Pin des Prozessors anders gesetzt werden muss :-( ich verstehe auch ehrlich gesagt die Schaltung an PB8 nicht. Über die Diode kann PB8 den Enable Eingang vom DC/DC gar nicht schalten. Aber die Pulse würden ja dafür sprechen, irgend einen Kondensator nachzuladen...
:
Bearbeitet durch User
Falls es immer noch um diesen Bootloader geht: https://github.com/EBiCS/BAFANG_GD32F303RCT6/blob/M820/documentation/M820_nur_Bootloader.bin Ich sehe nicht wo dort PB8 verwendet werden soll. Hast Du eventuell auch einen kompletten Dump, also Bootloader und die eigentliche Firmware? Vielleicht sieht man in der eigentlichen Firmware für was PB8 benutzt wird.
:
Bearbeitet durch User
Angehängte Dateien:
Dieter S. schrieb: > Hast Du eventuell auch einen kompletten Dump Habe ich bei GitHub hochgeladen: https://github.com/EBiCS/BAFANG_GD32F303RCT6/blob/M820/documentation/M820.bin
:
Bearbeitet durch User
Die eigentliche Firmware macht etwas mit PB8, das könnten eventuell Impulse sein, die da erzeugt werden. Der Bootloader macht das aber relativ sicher nicht. Bist Du sicher dass nur der Bootloader läuft und nicht die eigentliche Firmware wenn die Impulse an PB8 zu sehen sind?
:
Bearbeitet durch User
Dieter S. schrieb: > Bist Du sicher dass nur der Bootloader läuft und nicht die eigentliche > Firmware wenn die Impulse an PB8 zu sehen sind? Nein, die Pulse kommen erst, wenn man den on/off Button wieder los lässt. Kann sein, daß da der Bootloader schon abgearbeitet ist und man schon im Hauptprogramm unterwegs ist. Ich könnte das noch mal prüfen, indem ich eine Debugsession mit meiner Firmware an Offset 0x5000 starte, bei dem Versuch bleibt der Code im Bootloader hängen, aber die Spannungsversorgung bleibt an.
Laut den GPIO Registern von hier Beitrag "Re: GD32F303: Bootloader der Originalfirmware für Open Source Projekt nutzen" ist PB8 im Bootloader auf Input gesetzt.
D.h. die Pulse kommen von außen?
Bei den anderen Bafang Controllern ist PB8 der Eingang für das z-Signal vom Encoder. Ob der Encoder Pulse sendet, wenn er kein Magnetfeld sieht, muss ich nachlesen...
Hm dann war das wohl ne Sackgasse.
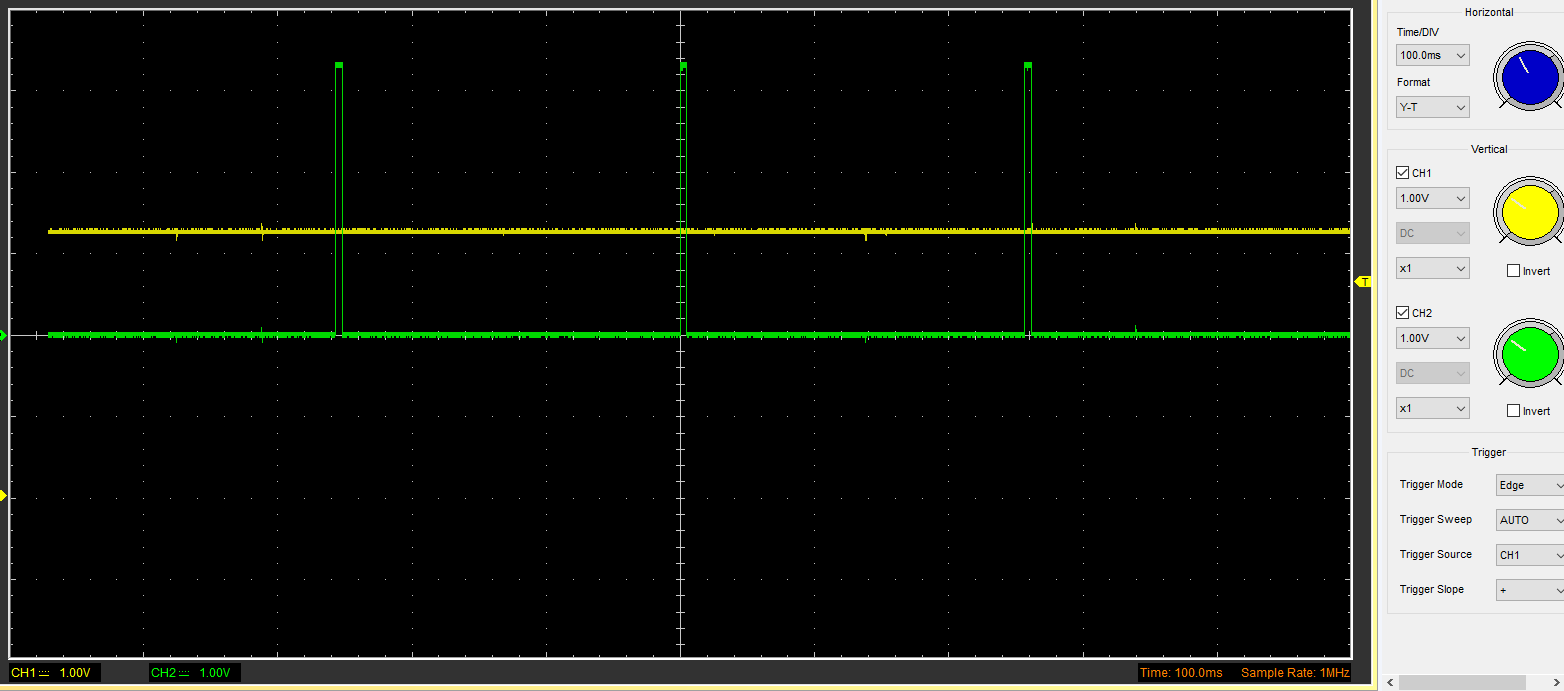
Will ich so noch nicht sagen, PB8 ist auf jeden Fall in der Schaltung zur Selbsthaltung beteiligt... Aber eins ist mir noch eingefallen, beim Timer3 init, konfiguriere ich PB8 wieder als Input, das habe ich jetzt aus kommentiert, jetzt kommen die Pulse auch mit 3,3V, die Selbsthaltung geht aber immer noch nicht :-(
:
Bearbeitet durch User
Ich habe mir Deinen Code nicht angeschaut aber PB4 ist per Default NJTRST für JTAG und wird erst per Remap zum GPIO Pin. Der Bootloader macht das Remap. Eventuell geht da ja was beim eigenen Code schief.
:
Bearbeitet durch User
Dieter S. schrieb: > PB4 ist per Default NJTRST für JTAG Ah, so genau habe ich nicht ins Datenblatt geschaut. Das hört sich hochverdächtig an. Werde ich am Sonntag probieren!
Dieter S. schrieb: > und wird erst per Remap zum GPIO Pin Das war tatsächlich des Rätsels Lösung! Vielen Dank!!! Diese zwei Zeilen haben das Problem gelöst :-)
1 | rcu_periph_clock_enable(RCU_AF); |
2 | gpio_pin_remap_config(GPIO_SWJ_SWDPENABLE_REMAP, ENABLE); |
https://github.com/EBiCS/BAFANG_GD32F303RCT6/commit/1988c8839bfff3dc797a6d9ff7104f079b04ded8
Jetzt habe ich mich an den Controller eines M215 Motors gemacht. Leider ist hier wieder das Einschalten der Spannungsversorgung eine Herausforderung. Die 5V zur Versorgung von externen Sensoren bekomme ich nicht aktiviert. Zum Einschalten des Controllers ist nur PB5 erforderlich. Damit wird das Display eingeschaltet und auch die 5V für interne Sensoren wie die Motor-Hallsensoren sind da. Es gibt einen Pin, der auf der Platine, der mit 5V Enable beschriftet ist, den kann ich über PC12 auf auf 3,3V bringen. Der schaltet aber leider nicht die 5V für die Peripherie frei. Mit der originalen Firmware kommen diese 5V, ich bekomme es mit meiner Firmware nicht hin. Den pnp Transistor der diese Spannung schaltet, habe ich auf der Platine identifiziert, die Spannung an der Base fällt mit der originalen Firmware auf 4,3V, bei mir bleibt sie auf 5V :-( Hat noch jemand einen Tipp, was ich noch probieren könnte?! Die Original-Firmware ist hier zu finden: https://github.com/EBiCS/BAFANG_GD32F303RCT6/blob/M215/documentation/M215_Original_Firmware.bin
:
Bearbeitet durch User
Habe es hinbekommen, PC2 schaltet die 5V für die Peripherie.
Sehr gut. Also kein tricky Watchdog oder ähnliches.
Nein, war nur tricky, dass der Pin auf low gezogen werden muss. Auf high gesetzt hatte ich alle Pins durchprobiert. Habe PC2 jetzt auf Open Drain konfiguriert, da er 4,3V auf GND ziehen muss.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.