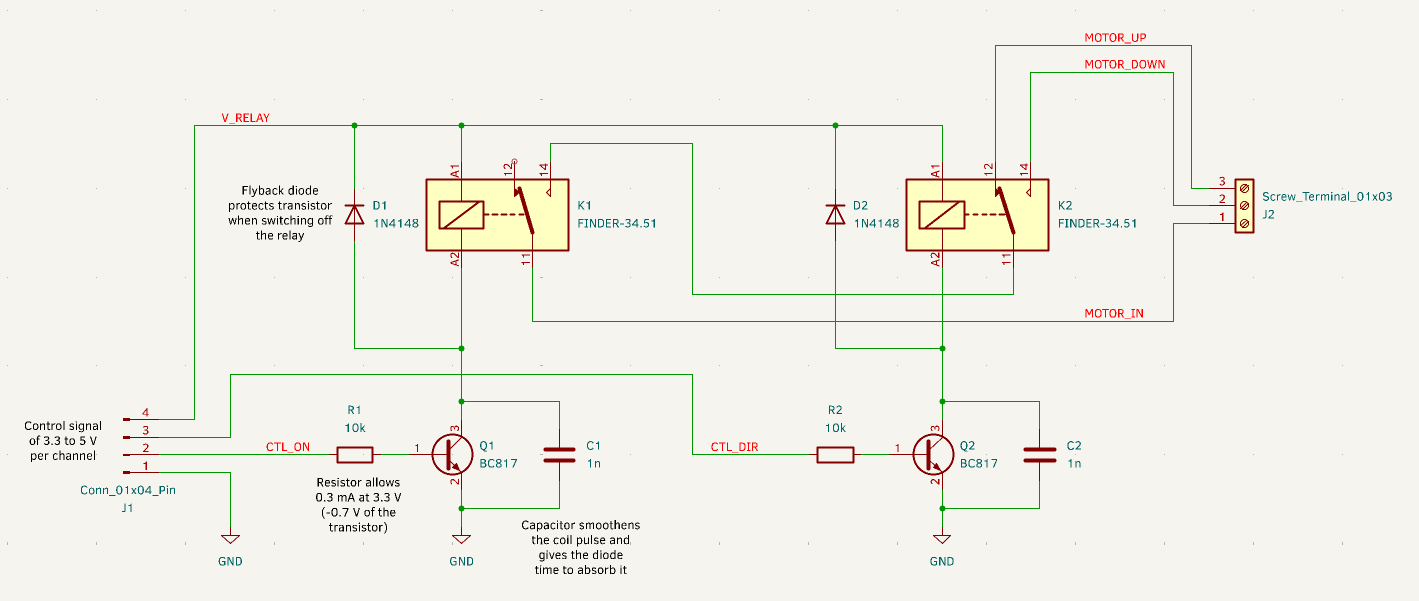
Hallo, ich möchte einen Rolloaktor bauen, der über mein eigenes Busprotokoll angesteuert wird und die Position der Rollläden sowie auch den Winkel der Raffstores intern verwalten kann, also nicht auf (unmögliche) exakte Timings der Ansteuerung über einen Bus (ohne Kollisionsverhinderung) und von einem Linux-Controller angewiesen ist. Meines Wissens nach gibt es sowas noch nicht. Das wird aber nur ein privates Projekt, der ganze Zertifizierungskram für CE und WEEE ist mir zu viel. Die grundsätzliche Schaltung mit einem Schließer- und einem dahinter geschalteten Wechsler-Relais ist mir bekannt. Den Rest macht dann die Firmware. Soweit funktioniert das also im Sunshine-Case. Damit wird zumindest verhindert, dass beide Leitungen des Motors gleichzeitig bestromt werden. Daneben möchte ich folgende Fälle aus der Kategorie „Safety“ berücksichtigen: 1. Die minimale Umschaltzeit der Richtungen soll eingehalten werden. Das macht die Firmware. 2. Beim Ausfall des Mikrocontrollers (alle GPIOs sofort auf Low) soll verhindert werden, dass das Wechsel-Relais vor dem Freigabe-Relais ausschaltet, was zu einer Unterschreitung der Umschaltzeit führen würde, und danach gleich wieder zur Abschaltung. Relais haben Toleranzen, das kann also passieren. 3. Beim Ausfall der Versorgungsspannung des Geräts soll das ebenfalls verhindert werden. Zur Abschaltverzögerung findet man regelmäßig Schaltungen mit einem Kondensator, oft vor dem Schalttransistor. Das wäre aber nur für Bedingung 2 ausreichend. Um auch Bedingung 3 zu erfüllen, müsste der Kondensator wohl hinter dem Transistor hängen, also direkt am Relais. Die Verzögerung soll mindestens so lang sein, wie die beiden Relais sich in ihrer Abschaltverzögerung und -dauer unterscheiden (Toleranzen), aber höchstens 100 ms, damit ein zügiger Richtungswechsel ab 200 ms möglich bleibt. Anbei ein Bild meiner bisherigen Testschaltung, ohne diese Safety-Anforderungen. Relais K1 schaltet an oder ab, Relais K2 stellt die Richtung ein und darf nur bei ausgeschaltetem K1 umgeschaltet werden. Relais K2 soll in Hardware sicher ausschaltverzögert werden, ohne Relais K1 zu beeinflussen. Ein Kondensator parallel zu K2 würde aber wohl auch K1 mitversorgen, wäre so also nutzlos. Jetzt stellt sich mir die Frage, wie man das umsetzen müsste. Dioden irgendwo rein? Widerstände? (Spannungsabfall in beiden Fällen?) Aus anderen Threads hier entnehme ich, dass das erstens nicht so einfach ist und es zweitens verschiedene Meinungen (oder Kenntnisstände) darüber gibt. Ich hoffe, da etwas schlauer zu werden. Weitere Eckdaten: Ein Gerät soll 8 Rollos steuern können, in ein REG-Gehäuse mit 6 TE passen und wird mit 12 V betrieben. Ich werde zwei davon verbauen. Später soll alles als OSHW veröffentlicht werden.
Angehängte Dateien:
-

Testschaltung.png
15 KB
Mit 1 nF wirst du nichts spürbares bewirken. Da werden eher einige hundert uF nötig sein. Allerdings wird es den Transistoren wohl nicht gut tun, so viel Ladung kurz zu schließen. Bei deinen Punkten 2 und 3 übertreibst du meiner Meinung nach. Halbwegs vernünftige Antriebe sollten solche seltene und kurze Ereignisse vertragen.
:
Bearbeitet durch User
Nemopuk schrieb: > Mit 1 nF wirst du nichts spürbares bewirken. Der C1 und C2 dient einem anderen Zweck, siehe Kommentar im Schema. Habe ich an anderer Stelle von jemandem gelernt, der sich scheinbar sehr gut mit Transistoransteuerung von Relais auskennt. Dürfte wohl eine Detailoptimierung sein. Aber wenn ich einen Fehler leicht ausschließen kann, dann mache ich das. Die gewünschte Verzögerung ist in dieser Schaltung wie gesagt noch gar nicht enthalten. Dass ich eine Kapazität im Bereich von 10 bis 100 µF brauche, habe ich schon erwartet. Den genauen Wert kann ich ausprobieren. Aber wie muss die da genau eingebaut werden, damit sie wie gewünscht wirkt?
Yves G. schrieb: > Aber wie muss die da genau eingebaut werden, damit sie wie gewünscht > wirkt? Ich würde das gar nicht in Hardware implementieren, weil ein simpler Tiefpass vor dem Transistor alle Schaltvorgänge verzögert. Du willst aber nicht verzögern, sonder zu schnelle Wechsel unterbinden. Das macht man besser in der Software.
Nemopuk schrieb: > Bei deinen Punkten 2 und 3 übertreibst du meiner Meinung nach. Halbwegs > vernünftige Antriebe sollten solche seltene und kurze Ereignisse > vertragen. Das nehme ich auch mal als Antwort, bin jedoch auf weitere Meinungen gespannt. In der Anleitung eines der Motoren steht, dass zumindest die Bestromung beider Leiter „auch im Millisekunden-Bereich“ den Motor zerstören kann. Zu zu schnellen Richtungswechseln habe ich nirgends eine Aussage gefunden. Falls es nur ein mechanisches und kein elektrisches Problem ist, dürfte die kurze Zeit tatsächlich nicht viel ausmachen, da sich da nicht mehr viel Masse in Bewegung setzt. Kann schon sein, dass ich diese Sicherheitsfunktion nicht brauche. Falls sie mit geringem Aufwand umzusetzen wäre, würde ich es mir trotzdem überlegen.
Nemopuk schrieb: > Ich würde das gar nicht in Hardware implementieren, (...). Das macht > man besser in der Software. Ja, Software kümmert sich um die Sunshine-Fälle, in denen die Software die volle Kontrolle behält. Es geht mir um den Fall, dass die Software während einer Motorfahrt abstürzt oder die Versorgungsspannung wegfällt. In diesen Fällen macht man mit Software vermutlich nichts mehr. Deshalb in Hardware.
warum macht man das heutzutage noch wenn es fertige günstige und sichere Lösungen wie Shelly gibt? Eigenes Protokoll? Evtl. mal generell auf MQTT wechseln?
Heinz R. schrieb: > Eigenes Protokoll? Evtl. mal generell auf MQTT wechseln? Und wie bekomme ich den Raffstore damit zuverlässig auf eine bestimmte Höhe gefahren und danach den ursprünglichen Lamellenwinkel wieder exakt eingestellt? Oder allgemein bei mehreren kurzen Fahrten die aktuelle Position noch getrackt? Deshalb soll das der µC in Echtzeit machen und das bietet so niemand an. MQTT läuft über TCP/IP, bei Shelly zudem noch über WLAN. Immer mehr Jitter. Shelly macht auch nur einen Rollo pro Gerät, das wird teuer.
Nemopuk schrieb: > Das macht man besser in der Software. Heinz R. schrieb: > warum macht man das heutzutage noch wenn es fertige günstige und sichere > Lösungen wie Shelly gibt? Er möchte funktionale Sicherheit und keinen smarten Spielekram! Oder, für Euch vereinfacht: Es soll kein Schaden entstehen, wenn sich die Software falsch verhält.
Die klassische Relaisschaltung dazu: Elko parallel zur Relaiswicklung, Diode in die Kollektorleitung.
Yves G. schrieb: > (..) > Ein Kondensator parallel zu K2 würde > aber wohl auch K1 mitversorgen, wäre so also nutzlos. Ein Kondensator parallel zur Relaiswicklung sorgt für eine Anzugs- und Abfallverzögerung. Das Relais schaltet langsam ein und langsam aus, was für schnelleren Kontaktabbrand sorgen kann. Zudem bilden der C und L vom Relais einen Schwingkreis. Das Problem musst du in der Ansteuerung der Relais lösen, also vor dem Transistor.
Werner H. schrieb: > Elko parallel zur Relaiswicklung, Diode in die Kollektorleitung. Elko ist klar. Wo die Diode hinsoll, habe ich nicht verstanden. Meinst du eine Diode zwischen Relais und Transistor? An welchem der 3 Abschnitte?
Jörg R. schrieb: > Ein Kondensator parallel zur Relaiswicklung sorgt für eine Anzugs- und > Abfallverzögerung. Ich hätte erwartet, dass der C (ohne R) unabhängig und schnell auflädt, ohne das Relais aufzuhalten. Beim Abschalten kann er das Relais aber noch einen Moment versorgen. Das ergäbe nur eine Abschalt-, aber keine Einschaltverzögerung. Mit R kann man andere Effekte erzielen. > Das Relais schaltet langsam ein und langsam aus, was > für schnelleren Kontaktabbrand sorgen kann. Hab ich auch schon von gelesen. Dieses Wechselrelais darf sowieso nicht unter Last geschaltet werden, weil das einen zu schnellen Richtungswechsel des Motors zur Folge hätte. Ist hier also unkritisch. > Zudem bilden der C und L vom Relais einen Schwingkreis. Und was sind die unerwünschten Folgen hier? > Das Problem musst du in der Ansteuerung der Relais lösen, also vor dem > Transistor. Damit kann aber der Wegfall der Versorgungsspanung nicht gepuffert werden, weil eine längere Ansteuerung ohne längere Versorgung des Relais keinen Effekt hat. (Oder?)
Yves G. schrieb: > Jörg R. schrieb: >> Ein Kondensator parallel zur Relaiswicklung sorgt für eine Anzugs- und >> Abfallverzögerung. > Ich hätte erwartet, dass der C (ohne R) unabhängig und schnell auflädt, > ohne das Relais aufzuhalten. Der C müsste schon so groß sein dass er das Relais für deine gewünschte Verzögerung versorgt. Selbst wenn er nicht besonders groß sein muss braucht er seine Zeit. Er bildet beim Zuschalten der Versorgungsspannung übrigens einen erstmal einen Kurzschluss der Versorgungsspannung da er nicht über einen Widerstand aufgeladen wird. Einzig CE vom Transistor liegt dazwischen. > Beim Abschalten kann er das Relais aber noch einen Moment versorgen. > Das ergäbe nur eine Abschalt-, aber keine Einschaltverzögerung. K1 hätte auch eine Einschaltverzögerung. Und da über den Kontakt von K1 der Motor versorgt wird, egal ob auf oder ab, ist das von Nachteil für K1. >> Das Relais schaltet langsam ein und langsam aus, was >> für schnelleren Kontaktabbrand sorgen kann. > Hab ich auch schon von gelesen. Dieses Wechselrelais darf sowieso nicht > unter Last geschaltet werden, weil das einen zu schnellen > Richtungswechsel des Motors zur Folge hätte. Ist hier also unkritisch. Nein, siehe oben. Yves G. schrieb: > Die Verzögerung soll mindestens so lang sein, wie die beiden Relais sich > in ihrer Abschaltverzögerung und -dauer unterscheiden (Toleranzen), aber > höchstens 100 ms, damit ein zügiger Richtungswechsel ab 200 ms möglich > bleibt. Ich würde die Zeit für den Richtungswechsel >>200ms auslegen. So eine kurze Zeit macht für ein Rollo keinen Sinn. Werden die Motoren über DC versorgt? Dann könnte man überlegen K1/Q1 durch einen schnellen Mosfet zu ersetzen.
:
Bearbeitet durch User
Relais 1 verbindet wenn angezogen Motor_In mit Motor_Up. Relais 2 verbindet wenn angezogen Motor_In mit Motor_Down. Falls gewünscht könnte man über weitere Kontakte beide Relais gegenseitig verriegeln so dass garantiert nie beide gleichzeitig an sind.
:
Bearbeitet durch User
Yves G. schrieb: > Der C1 und C2 dient einem anderen Zweck, siehe Kommentar im Schema. Du schreibst „smoothens the coil pulse“. Welcher „Pulse“ soll da kommen, Du hast doch die Freilaufdioden. Ein Pulse kommt nur, wenn diese nicht vorhanden sind. Zumindest in Durchlassrichtung ist die Diode sehr schnell.
:
Bearbeitet durch User
Moin, Harald A. schrieb: > Yves G. schrieb: >> Der C1 und C2 dient einem anderen Zweck, siehe Kommentar im Schema. > > Du schreibst „smoothens the coil pulse“. Welcher „Pulse“ soll da kommen, > Du hast doch die Freilaufdioden. Ein Pulse kommt nur, wenn diese nicht > vorhanden sind. Zumindest in Durchlassrichtung ist die Diode sehr > schnell. Wenn man abschaltet, springt die Spannung am Transistor auf Versorgungsspannung plus Diodenflussspannung. Und das in der Abschaltphase, in der der Transistor noch ein bisschen leitfähig ist. Also viel Abschaltverlust. Den kann der Kondensator verringern, ein Snubber quasi. Aber ob das nötig ist, ist wohl fraglich, schließlich wird ja eher selten geschaltet und ein Schaltvorgang macht den Transistor nicht kaputt. Gruß, Roland
Roland D. schrieb: > springt die Spannung am Transistor auf Versorgungsspannung plus > Diodenflussspannung. Und das in der Abschaltphase, in der der Transistor > noch ein bisschen leitfähig ist. Also viel Abschaltverlust. Solange das nicht 1000 mal pro Sekunde passiert, würde ich mir da keinen Kopf machen. > Den kann der Kondensator verringern, ein Snubber quasi. Dann sollte man aber keinen "Quasi-Snubber" einbauen, sondern einen richtigen. Denn so wie der Kondensator grade eingebaut ist, sorgt der für genau diese hohen Schaltverluste dann eben beim Einschalten. Fazit: den 10k Basiswiderstand vernünftig niederohmig machen und den Kondensator raus. Funktioniert zigmilliardenmal in vielerlei Geräten. Yves G. schrieb: > Habe ich an anderer Stelle von jemandem gelernt, der sich scheinbar > sehr gut mit Transistoransteuerung von Relais auskennt. Und scheinbar in einem Graubereich auch Angst hat und deshalb "zu viel des Guten" macht. Mich wundert, dass der keinen BE-Widerstand vorsieht, damit auch bei irgendwelchen Leckströmen die Transistoren z.B. im Resetfall sicher abgeschaltet sind. Yves G. schrieb: > In der Anleitung eines der Motoren steht, dass zumindest die Bestromung > beider Leiter „auch im Millisekunden-Bereich“ den Motor zerstören kann. Zeig doch mal. Welcher "ms-Bereich" da gemeint ist. Einstellig, zweistellig oder dreistellig? Yves G. schrieb: > Wechsel-Relais ... Freigabe-Relais Warum nimmst du nicht statt dieser Wechsel-Freigabe-Kombination einfach einen Rauf-Runter-Kombination. Die beiden Relais kann man dann recht einfach mit einem Doppelwechsler gegenseitig verriegeln (und zwar so richtig hardwaremäßig, dass das eine Relais sicher erst dann einschalten kann, wenn das andere samt aller Toleranzen sicher abgefallen ist) und so dafür sorgen, dass nie beide Wicklungen bestromt sind.
1 | + ----------------o--------------------------o-- |
2 | |_ |_ |
3 | / K2 / K1 |
4 | | | |
5 | K1 [/] K2 [/] |
6 | | | |
7 | |/ |/ |
8 | rauf ---1k--o---| runter ---1k--o---| |
9 | | |> | |> |
10 | 10k | 10k | |
11 | | | | | |
12 | GND --------o-----o--------------------o-----o--- |
13 | |
14 | |
15 | .------ MOTOR_UP |
16 | | |
17 | K1 \ |
18 | | |
19 | o------ MOTOR_IN |
20 | | |
21 | K2 \ |
22 | | |
23 | '------ MOTOR_DOWN |
Yves G. schrieb: > im Schema Das ist kein "Schema", sondern ein "Schaltplan". Aber bei französischem Vornamen drücke ich da mal ein Auge zu... ;-)
:
Bearbeitet durch Moderator
Jörg R. schrieb: >>> Das Relais schaltet langsam ein und langsam aus, was >>> für schnelleren Kontaktabbrand sorgen kann. > >> Hab ich auch schon von gelesen. Dieses Wechselrelais darf sowieso nicht >> unter Last geschaltet werden, weil das einen zu schnellen >> Richtungswechsel des Motors zur Folge hätte. Ist hier also unkritisch. > > Nein, siehe oben. Habe ich leider nicht verstanden. Für mich ist das Schalten eines Relais, über das kein Strom fließt, harmlos. > Ich würde die Zeit für den Richtungswechsel >>200ms auslegen. So eine > kurze Zeit macht für ein Rollo keinen Sinn. Der Raffstore-Motor erlaubt 200 ms Umschaltzeit. Der für die Rollos 500 ms. > Werden die Motoren über DC versorgt? Dann könnte man überlegen K1/Q1 > durch einen schnellen Mosfet zu ersetzen. Nein, 230 V AC. Lothar M. schrieb: > Zeig doch mal. Welcher "ms-Bereich" da gemeint ist. Einstellig, > zweistellig oder dreistellig? Steht da nicht. Da steht genau das. Das ist eine Anleitung von Warema, habe sie angehängt, da ich sie online nicht gefunden habe. Kommt aber von online. > Yves G. schrieb: >> Wechsel-Relais ... Freigabe-Relais > Warum nimmst du nicht statt dieser Wechsel-Freigabe-Kombination einfach > einen Rauf-Runter-Kombination. Die beiden Relais kann man dann recht > einfach mit einem Doppelwechsler gegenseitig verriegeln (und zwar so > richtig hardwaremäßig, dass das eine Relais sicher erst dann einschalten > kann, wenn das andere samt aller Toleranzen sicher abgefallen ist) und > so dafür sorgen, dass nie beide Wicklungen bestromt sind. Das sind dann wieder aufwändigere, vermutlich auch teurere und größere Relais. Außerdem würde ich mal schauen, ob man Klein- und Niederspannung an beiden Kontakten gemeinsam betreiben darf. Das Relais wird mit 12 V angesteuert, das kann ich bestenfalls noch auf 24 V ändern, die Motoren aber mit 230 V AC. Da möchte ich schon einen Abstand zwischen haben. Mit PCB-Schlitz zwischen beiden Spannungen. Das geht mit dieser Schaltung nicht mehr. > Yves G. schrieb: >> im Schema > Das ist kein "Schema", sondern ein "Schaltplan". Aber bei französischem > Vornamen drücke ich da mal ein Auge zu... ;-) KiCad nennt es Schema, zumindest intern oder auf englisch. Kann ich aber in Zukunft vermeiden. ;-)
Manfred P. schrieb: > Er möchte funktionale Sicherheit und keinen smarten Spielekram! > > Oder, für Euch vereinfacht: Es soll kein Schaden entstehen, wenn sich > die Software falsch verhält. so was halst Du für Spielkram? https://shellyparts.de/products/shelly-pro-dual-cover-shutter-pm?variant=44446109729035
Angehängte Dateien:
-

Rolladen_Logik.png
15 KB
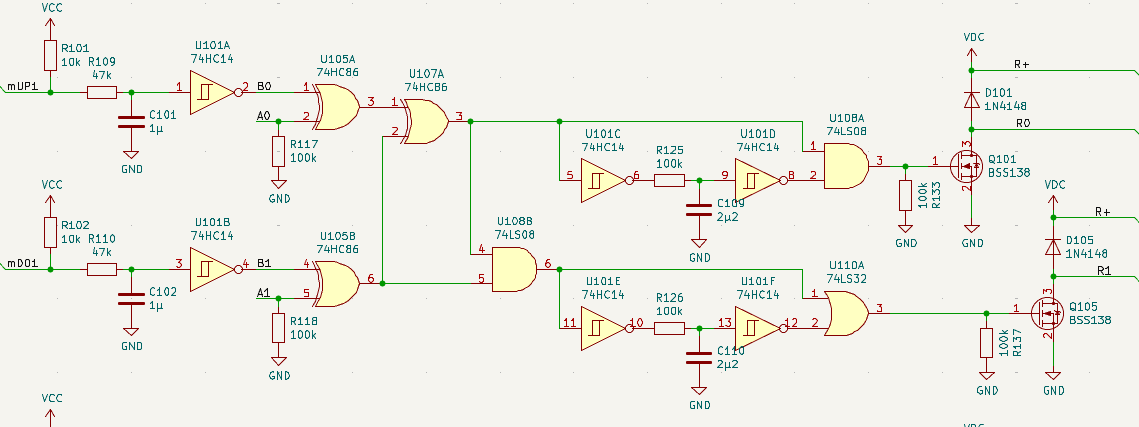
Hi, ich stand vor einer ähnlichen Thematik: ich wollte die Relaisansteuerung ohne Microcontroller lösen (falls "SW-Problem" im allgemeinen) und habe es mit Logik-ICs gelöst. Dazu gab es hier auch mal einen Thread dazu (Beitrag "Rolladensteuerung mit 74xx"). Als Anregung ein Schaltplanausschnitt. Beim Einschalten wird zuerst das Relais für die Richtung geschaltet (sofern nötig), dann das Relais für die Versorgung; beim Abschalten zuerst die Versorgung abgeschaltet, dann das Relais für die Richtung. Ich habe das dann noch mit Logik erweitert, so dass ich entweder per externem Schalter/Taster oder mit einem EPS8266 die Rolladenfahrt auslösen kann. Grüße
Yves G. schrieb: > Ich hätte erwartet, dass der C (ohne R) unabhängig und schnell auflädt, > ohne das Relais aufzuhalten Da gibt es doch die Grundregel: An C kann sich die Spannung nicht sprunghaft ändern, an L kann sich der Strom nicht sprunghaft ändern. In beiden Fällen spielt sich das gemäß einer e-Funktion ein. Ohne R wird der Strom beim Einschalten durch C so hoch, dass der Spannungsabfall an den Drähten und am Innenwiderstand der Quelle deutlich spürbar wird. Also bekommt das Relais zunächst weniger Spannung und zieht verzögert an.
Stefan N. schrieb: > Als Anregung ein Schaltplanausschnitt. Beim Einschalten wird zuerst das > Relais für die Richtung geschaltet (sofern nötig), dann das Relais für > die Versorgung; beim Abschalten zuerst die Versorgung abgeschaltet, dann > das Relais für die Richtung. Um solche Anforderungen für die Schaltlogik zu vermeiden, gibt es die bekannte Rolladensteuerung, wie sie für Handbedienung über zwei Tastschalter verwendet wird, ein Taster 1xUm fürs Hochfahren und einer fürs Runterfahren. Versehentliches direktes Umschalten der Fahrtrichtung, wie es bei Verwendung eines dedizierten Richtungsschalters passieren kann, ist damit ausgeschlossen, versehentliche gleichzeitige Aktivierung beider Richtung ebenfalls.
:
Bearbeitet durch User
Rainer W. schrieb: > Stefan N. schrieb: >> Als Anregung ein Schaltplanausschnitt. Beim Einschalten wird zuerst das >> Relais für die Richtung geschaltet (sofern nötig), dann das Relais für >> die Versorgung; beim Abschalten zuerst die Versorgung abgeschaltet, dann >> das Relais für die Richtung. > > Um solche Anforderungen für die Schaltlogik zu vermeiden, gibt es die > bekannte Rolladensteuerung, wie sie für Handbedienung über zwei > Tastschalter verwendet wird, ein Taster 1xUm fürs Hochfahren und einer > fürs Runterfahren. Versehentliches direktes Umschalten der > Fahrtrichtung, wie es bei Verwendung eines dedizierten > Richtungsschalters passieren kann, ist damit ausgeschlossen, > versehentliche gleichzeitige Aktivierung beider Richtung ebenfalls. Dem TO geht es nicht um die Schaltlogik. Es geht darum in welcher Reihenfolge die Relais bei einem Stromausfall abfallen.
Angehängte Dateien:
-

Unbenannt.png
41 KB
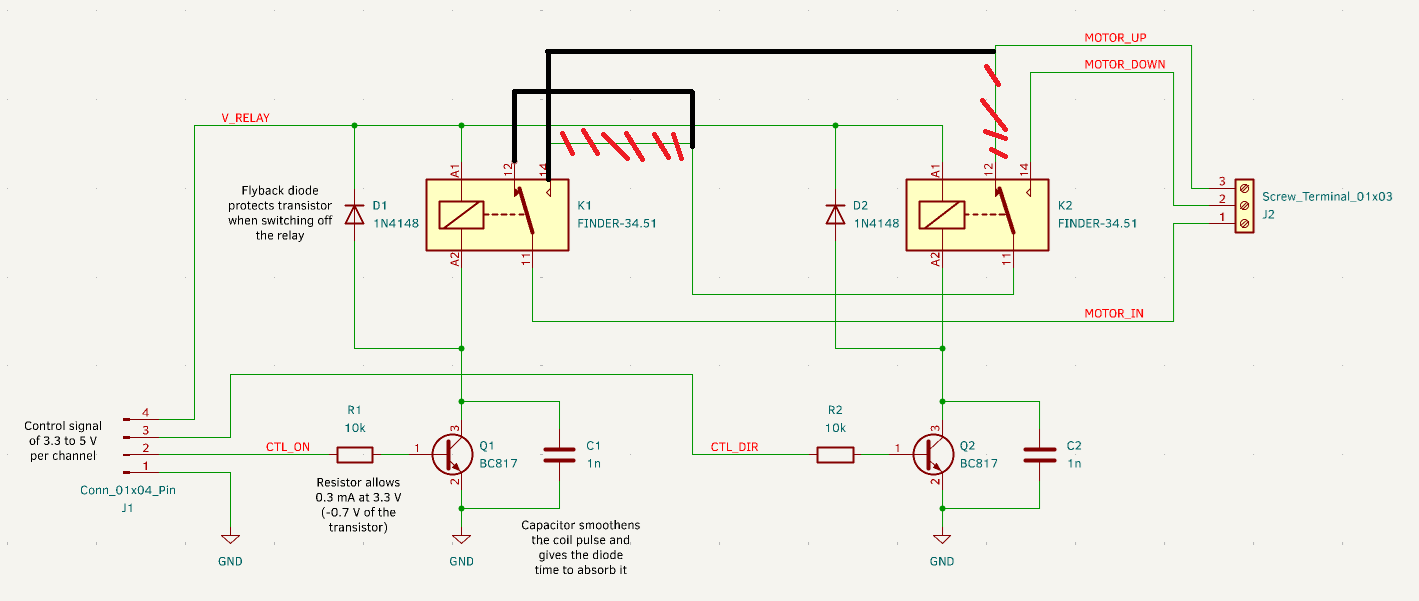
Hallo, ich würde die Schaltung wie im Bild ändern. Dann wäre es egal wie die Relais abfallen oder angesteuert werden. Der Rest in Software. Gruß Jürgen ist wohl das was rawi meint.
:
Bearbeitet durch User
Jörg R. schrieb: > Dem TO geht es nicht um die Schaltlogik. Es geht darum in welcher > Reihenfolge die Relais bei einem Stromausfall abfallen. Doch, der genannten Schaltung ist die Abfallverzögerung der Relais bei einem Stromausfall völlig egal, weil sowieso nur eins gleichzeitig aktiv ist. Jürgen C. schrieb: > ist wohl das was rawi meint. Genau das ...
:
Bearbeitet durch User
Jürgen C. schrieb: > ich würde die Schaltung wie im Bild ändern. > Dann wäre es egal wie die Relais abfallen oder angesteuert werden. > Der Rest in Software. Huh, das sieht interessant aus, sowas habe ich noch nicht gesehen. Dürfte aber alle Probleme lösen, schätze ich. Gleichzeitig kann ich den Punkt 2 von oben (Ausfall des Mikrocontrollers, alle GPIOs sofort auf Low) von der Liste streichen. Die Relais werden (wegen der Anzahl) über einen IO-Expander angesteuert, der über I²C angebunden ist. Bei einem Softwarefehler habe ich heute beobachtet, dass der µC abstürzt, die Relais aber unverändert bleiben, bis der µC sie beim Booten wieder (kontrolliert) initialisiert. Hier kann also nichts passieren, ich müsste nur die Initialisierung nach einem Fehler in der richtigen Reihenfolge durchführen statt blind der Reihe nach. Ich würde meine Schaltung etwa so beschreiben:
1 | if (on) |
2 | {
|
3 | if (up) |
4 | {
|
5 | UP(); |
6 | }
|
7 | else // Kann jederzeit wechseln |
8 | {
|
9 | DOWN(); |
10 | }
|
11 | }
|
12 | else
|
13 | {
|
14 | // Nichts
|
15 | }
|
Die andere Verschaltung von Jürgen ist eher das hier:
1 | if (up) |
2 | {
|
3 | UP(); |
4 | }
|
5 | else if (down) // (1) |
6 | {
|
7 | DOWN(); // Geht nur, wenn nicht auch up ist |
8 | }
|
9 | else
|
10 | {
|
11 | // Nichts
|
12 | }
|
(1) An dieser Stelle könnte theoretisch auch jederzeit ein Richtungswechsel stattfinden, aber nur, wenn up und down beide per Software aktiviert wurden, was bei korrekter Programmierung mit Umschaltpause normalerweise nicht passieren soll. Falls es doch passiert, verhindert die Hardware die gleichzeitige Dauerbestromung beider Richtungen und ist in dem Zustand nur für den Ausfall der Spannungsversorgung anfällig (sonst nicht). Diese Einzelfehlersicherheit erscheint mir ausreichend. Die primitive Schaltung ohne gegenseitige Verriegelung wäre das hier:
1 | if (up) |
2 | {
|
3 | UP(); |
4 | }
|
5 | if (down) // Beides gleichzeitig möglich |
6 | {
|
7 | DOWN(); |
8 | }
|
:
Bearbeitet durch User
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.