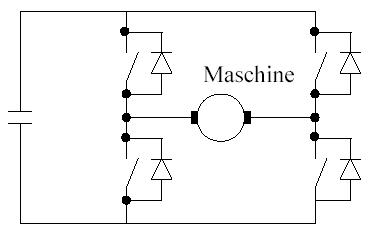
Hallo, ich muss für meine Diplomarbeit eine Gleichstrommaschine (24V, 4A) ansteuern. Dazu möchte ich gerne eine Transistorbrücke verwenden (Prinzipschaltung im Anhang). Die Schalter müssten in meinem Fall dann wohl durch FETs ersetzt werden. Jetzt meine Frage: Gibt es eine solche Brückenschaltung mit den Freilaufdioden als komplettes Modul oder muss ich es selbst aufbauen? Wenn ich es selbst aufbauen muss, wie muss dann die Schaltung genau aussehen und welche Halbleitertypen soll ich einsetzen (Dioden und FETs) Vielen Dank für Eure Hilfe! Gruß, Thomas
Angehängte Dateien:
-

transistorsteller.JPG
11 KB
Hallo Thomas, als fertigen Treiber kannst Du z.B. den Thoshiba nehmen. Datenblatt im Anhang. Im Nachfolgeanhang mal eine Schaltung mit Bipolaren Transistoren für 1.5A als Vorlage (sollte mit anderen Transistoren auch 4A machen, allerdings nicht als PWM). MfG Manfred Glahe
Hallo Manfred, der TB6549P ist genau das, was ich suche! Aber bei Toshiba scheint die Homepage ihn noch nicht zu kennen. Ist das Teil so neu, bzw. ist es schon verfügbar? Wo bekomme ich ein "richtiges" Datenblatt her? Stefan
Hallo Stefan, das Datenblatt habe ich schon vor ca. 1 Jahr heruntergeladen, aber den Baustein noch nicht eingesetzt bzw. geordert (kenne daher auch keinen Ditributor). Als Alternative ginge noch die L298 Serie (möglicherweise mit parallel schalten von Treibern um 4A zu erreichen). MfG Manfred Glahe
Hallo Manfred, es klingt sicher nach Erbsenzählen, aber beim L298 stören mich die nötigen externen Dioden. Der TB6549P hat einfach alles genau so, wie ich es brauche, ohne grossartige Aussenbeschaltung. Ich werde mal beim Toshiba-Distri anfragen, wie es mit dem Teil aussieht. Per Google habe ich bereits Presse-Infos gefunden, leider kein Datum und kein Datenblatt mit dazu. Vielen Dank, Stefan
die irf Fets sind dafür vielleicht gut geeignet, integrierte freilaufdiode und es gibt sie auch als arrays. Eine auswahl kannst du sehr leicht auf der homepage www.irf.com machen, haben eine sehr gute suchoption /U/I usw.
Hallo Stefan, wenn Du einen Distributor gefunden hast, dann benachrichtige mich bitte. Davon werde ich mir einige auf Vorrat kaufen. "es klingt sicher nach Erbsenzählen" Ganz sicher nicht, denn die integrierten Dioden verringern die Störabstrahlung um einiges. MfG Manfred Glahe
Hallo, eine andere Variante wäre der L6203 von SGS Thomson. Der kann 5A bis 40V. Den IC gibt es fast überall für ca. 6...7Euro. Tschüß
Danke für die Infos. @Manfred: Sobald ich was näheres zum TB6549P weiss, werde ich Euch unterrichten. Stefan
also ich habe heute 4 stück als sample bei toshiba bestellt die telefon nummer ist 06126 590 222 Firma Glyn und seine e-mail adresse ist bob@glyn.de eckard
Ich kann die Euphorie für den TB6549P nicht nachvollziehen. Dem Datenblatt sind 30V max. und 1,5A mittlerer Strom zu entnehmen. Für 4A ist er überhaupt nicht geeignet - schon allein das Gehäuse schafft es nicht, die 16W Verlustleistung abzuführen. Bleibt der oben vorgeschlagene L6203. Und wer DIL-Gehäuse liebt, kann den kleinen Bruder L6202 verwenden: 1,5A 48V RDSon 0,3 Ohm.
@Michael "Ich kann die Euphorie für den TB6549P nicht nachvollziehen." Dann hast Du offensichtlich das Datenblatt nicht genu genug durchgelesen! Leistung ist eine Sache Komfort eine andere. @Danke Ecki! MfG Manfred glahe
Hallo Manfred Glahe! Da Sie sich offensichtlich schon mit diesem Typ beschäftigt haben, können Sie mir vielleicht weiterhelfen. Aus dem Datenblatt des TB6549P entnehme ich: Betriebsspannung bis 27V, darf 30V nicht überschreiten. (Wird bei 24V Trafo, Gleichrichtung und Siebung im Leerlauf knapp.) Enable PWM ist nicht möglich, nur One-Phase-PWM. (Oder über Standby, aber das dürfte nicht schnell genug sein.) Eingebauter Überstromschutz ist auf 5A fest eingestellt, kann aber zwischen 3,5 und 6,5A schwanken. Eine Möglichkeit, die Begrenzung extern einzustellen, existiert nicht. Habe ich das richtig verstanden, oder ist mir etwas entgangen. Wo sehen Sie den Vorteil zum Beispiel zum L6203? Vielen Dank Sven
-Habe ich das richtig verstanden, oder ist mir etwas entgangen. Wo -sehen Sie den Vorteil zum Beispiel zum L6203? Das will ich auch wissen ! Das Datenblatt ist recht bunt und äußerst zurückhaltend. Stehen die wichtigen Informationen auf den Rückseiten :-) ?
Hi Michael! Nee, nee, das ist nicht das Datenblatt. Das ist nur Werbung. Das eigentliche Datenblatt findest Du hier: http://doc.semicon.toshiba.co.jp/pdf_e/docweb123/ea10638.pdf Sven
Hallo Sven,
"Enable PWM ist nicht möglich," PWM mit 100KHz.
"kann aber
zwischen 3,5 und 6,5A schwanken." 4.5A max und fest.
"Vorteil zum Beispiel zum L6203" Habe mir den L6203 mal angesehen, da
es den, wie ich nun weiß, auch im DIL gibt sehe ich nur noch den
zusätzlichen sens R (aber das könnte auch ein Vorteil sein wenns drauf
ankommt).
Für Motorbrücken in Kleinantrieben brauche ich keine 48V, maximal 24V
Motore. Und dort wo es nach mechanischer Untersetzung klemmt ist mir
der Motorstrom als Aussage zu unsicher (das mach ich lieber da wo viel
Kraft ausgeübt wird, die Motoren selbst sind dabei noch nie zum Problem
geworden).
Nun noch zum Preis, was kostet den der L6203?
MfG Manfred Glahe
Hallo Manfred! "PWM mit 100KHz" Schon klar, wäre auch doof, wenn er das nicht könnte. Aber eben nur im One-Phase-Betrieb, nicht im Enable-PMW-Betrieb, oder? One-Phase heißt hier, der Motor wird mit PMW zwischen Betriebsspannung und Kurzschluß hin- und hergeschalten (Datenblatt S. 6). Enable-PWM heißt, der Motor wird zwischen Betriebsspannung und Leerlauf oder beim Bremsen zwischen Kurzschluß und Leerlauf hin- und hergeschalten. Vorteil ist geringere Stromaufnahme und Motorbelastung, Nachteil ist nichtlinearer Verlauf der Drehzahl zur PWM. Two-Phase kann er demzufolge auch nicht ohne weiteres, Hin- und Herschalten zwischen Vorwärts und Rückwärts, mit Null Drehzahl bei 50% PWM. Man könnte alle Betriebsarten möglicherweise durch verschiedentliches Beschalten der IN, PWM und SB-Eingänge erreichen, aber es steht nirgends, ob das zulässig ist. "4.5A max und fest" Dann habe ich wohl ein anderes Datenblatt, hier steht: "This IC includes a circuit which detects a current flowing through the output power transistors. The current limit is set to 5 A (typ.)...Also, output peak current should be less than 3 A because of the variations below, Detected current: Approximately from 3.5 to 6.5 A" "Für Motorbrücken in Kleinantrieben brauche ich keine 48V, maximal 24V" Naja, aber 24V-Trafos mit Graetzbrücke haben am Elko schon 32V im Stillstand, und die Leerlaufspannung der Trafos zieht das noch weiter hoch. Eine Spannungsstabilisierung für 24V 5A nur wegen des Treibers? Und alternativ wäre das nächste ein 18V-Trafo, ist auch nicht so schön, da bricht die Spannung unter Last zu weit ein. Also, für zum Beispiel Modellbahn mit 16-18V kann ich mir vorstellen, dass der TB ideal ist. Aber ich habe halt gerade eine Anwendung, wo er nicht mehr reichen würde. Da ich aber immer gern für Neues zu haben bin, wollte ich mal Deine Meinung hören. "sehe ich nur noch den zusätzlichen sens R (aber das könnte auch ein Vorteil sein wenns drauf ankommt)" Zum Beispiel, wenn ich meinen Motorstrom auf weniger als 5A begrenzen will? "Nun noch zum Preis, was kostet den der L6203?" 7 EUR bei Reichelt. Für mich ist halt auch die Verfügbarkeit interessant. Zwei Muster vom Hersteller, und dann keine Quelle mehr ist nicht so doll. Das Problem habe ich bei Encodern schon. Was nützt es mir auf Dauer, wenn mir jemand ein Muster für ein spezielles Teil besorgen kann, ich meine Schaltung damit aufbaue und an weitere dann nicht rankomme, weil Stückzahl zu gering. Sven
Hallo Sven, im Anhang noch ein ausführlicheres Datenblatt vom Treiber. Wechseln würde ich auch nicht, wenn ich schon mit dem L6203 arbeiten würde, zumal es den ja ebenfalls im DIL Gehäuse gibt. Wie sehen denn die Schaltflanken bzw. Anstiegszeiten aus? Da wird in den Datenblättern oft übertrieben. Ich habe ebenfalls 5Stück bestellt und sie währen auch in großen Stückzahlen zu haben (kommt hier sowieso nicht vor). MfG Manfred glahe
@Sven Danke für den Link; das sieht schon eher nach Datenblatt aus. @Manfred Teste den L6203 an, er wird Dir gefallen. Zunächst hatte ich ihn nur mit 12V Getriebemotoren an einem 80C552 betrieben: PWM0 + PWM1 (20kHz), ADC0 und CT0 + CT1 für den Inkrementalgeber - fertig war der Antrieb. Mit einem ATmega ist dies genauso problemlos machbar. Die Überwachung des Motorstroms mit einem Shunt-Widerstand ist sehr sinnvoll: 0 Amp. Motor nicht angeschlossen, >=Max.Amp. mechanische Überlast; die Physik hört doch hinter einem Getriebe nicht auf. Und wenn das Teil mal zu warm werden sollte, läßt es sich einfach mit einem Kühlkörper versehen - eine Schraube, keine Isolierung. Mittlerweile nehme ich ihn auch für bipolare Schrittmotore; da kann es manchmal sehr entscheidend sein, die Versorgungsspannung sehr hoch zu wählen >=30V, um hohe Schrittfrequenzen zu erzielen.
@Michael "die Physik hört doch hinter einem Getriebe nicht auf." Das ist sicher richtig, aber meine Anwendungen waren bisher Kleinmotore (ca.500mA mit Planetenuntersetzer welche ich bislang mit der oben geposteten eigenen Brücke angesteuert habe. die L Serie war mir nur im Leistungsgehäuse bekannt und das währe nun wirklich übertrieben dafür). Wenn der gegen den Anschlag dreht merkt der Motor das garnicht, denn die geringe Stromerhöhung ist nicht sicher ein Maß für diesen Fall. Da ist längst die Mechanik verzogen. Und Leistung muß da auch nicht umgesezt werden, ein DIL reicht dafür. Nachdem ich mir die L62 Reihe mal genauer angeschaut habe sehe ich die Rsens Überwachung (bei Strömen über 1A) auch als Vorteil für diesen Baustein an. Schaltzeiten interessieren mich aber immer noch, nur um das zu testen kann ich mir hier leider keinen kaufen. MfG Manfred Glahe
@Manfred Da ich gerade eine Platine auf dem Tisch habe, habe ich mal die Anstiegszeit gemessen. Die Schaltung hat am Ausgang ein Ferrit T-Filter (DSS306-2n2). Anstiegszeit ohne Last ca. 150ns, mit ca. 4A (24V, 4,7Ohm) etwa 200ns. Das gibt die Angaben aus dem Datenblatt wieder, sodaß ich keine weiteren Messungen anstelle. Bei induktiven Lasten werden sich diese Werte erwartungsgemäß nicht verschlechtern. Die Motoren, die ich verwende, kann man mit kleinen Scheibenwischermotoren vergleichen; 12V/50W und Getriebe 1:186. Der Ruhestrom ohne Last ist ca. 0,3A und steigt deutlich an, wenn die Mechanik gegen die Bande fährt oder einen Finger abtrennen möchte. Beides sind unzulässige Betriebszustände, die mit allen Mitteln verhindert werden müssen. Der L6203 bremst diesen Motor aus voller Fahrt ohne Murren durch Kurzschluß ab. Insgeheim hoffe ich, daß mal ein Hersteller solche Treiber mit RDSon-Werten fertigt, wie sie heutzutage im MOSFET-Bereich üblich sind, einige zig Milliohm.
@Michael "12V/50W und Getriebe 1:186." Ist das richtig? Wenn Du am Motor 1 Kg aufwendest, dann hast Du doch hinter dem Getriebe schon 186 Kg. D.h. die Sensitivität liegt um den Faktor 1:186 niedriger. Je nach Getriebe (schwer gängig usw.) sind dort kleinerer Lastschwankungen am Motor nicht mehr gut zu detektieren. Motorschutz ja, aber Systemschutz doch nicht (für obige steuerung). Kannst Du mir mal Deine Schaltung mailen? Wofür setzt Du die ein? MfG Manfred Glahe
@Manfred Hier eine Übersicht: http://www.buehlermotor.de/cgi-bin/sr.exe/productpagede&productpage=78 Die vier ersten sind relevant; Leistungsaufnahme 30W, da habe ich mich falsch erinnert. Getriebedaten und Bauform haben sich im Laufe der Zeit leicht verändert. Bei diesen Motoren ist die Achse herausgeführt, sodaß man dort einen Inkrementalgeber anbringen kann. Die kleineren Lastschwankungen interessieren mich am Motor wenig - aber ob er 2A oder 3A zieht dann schon. Eine Anwendung ist die Erzeugung von Zugkräften bis 200N (20kg), die ein Dehnungsmeßstreifen aufnimmt. Die Schaltung ist nichts Besonderes und bei diversen µPs immer gleich: 2 x PWM-Ausgänge an IN1+IN2, ENABLE an separaten Port-Ausgang (disabled beim Einschalten!), Rshunt 0,33Ohm und über 10k+100nF gefiltert an einen ADC-Eingang. Je einmal 100nF für Boost1+2 sowie Vref. Die Ausgänge zum Motor. Dieser wird bidirekional betrieben; alternativ kann man auch zwei DC-Motoren unidirektional betreiben.
Hallo Wir haben hier ein ähnliches Problem gehabt. Wir hatten den L298 parallel und den L6203 im Betrieb. Keiner der beiden hat es lange gemacht (kann natürlich auch an einem Fehler in der Schaltung gelegen haben). Nachdem uns ein paar durchgebrannt sind (Der L6203 gibt die größte Flamme ;-)) war uns die Sache zu teuer. Wir haben jetzt mit 4xIRFZ34N und 2xL6384 (leider in D nur von Farnell und Bürklin erhältlich) eine H-bridge aufgebaut. Mit dieser Version sind wir sehr zufrieden.
Hallo! Ich benutze zwar keine der oben genannten ICs, sondern zwei National LMD18200 (3A @ 55V, Sign Magnitude oder Locked Antiphase betrieb möglich, Brake und Direction Pins, Übertemperatur Ausgang, Stromsensor, Unter/Überspannungschutz, Überstromschutz... - leider aber mit 19,90 Euronen bei Reichelt recht teuer) für meinen Roboter aber darum gehts mir eigentlich auch gar nicht. Viel mehr würde mich interessieren ob ihr gute Bezugsquellen (für privat Personen) für Quadrature Encoder (also Drehgeber mit zwei Phasenverschobenen Ausgängen) kennt? Momentan benutzte ich noch selbstgemachte Taktscheiben + CNY70 Reflexlichtschranke mit 60 Impulsen pro Umdrehung - reicht eigentlich aus, nur hätte ich es bei langsamen Geschwindigkeiten gern etwas genauer. Danke schonmal im vorraus! MfG, Dominik S. Herwald
@Jan: Von den L6203 habe ich in den letzten 15 Jahren mehrere hundert Stück verbaut: keiner machte je Probleme. Andernfalls würde ich ihn nicht empfohlen haben.
Angehängte Dateien:
-

Robo-Drive.jpg
290 KB
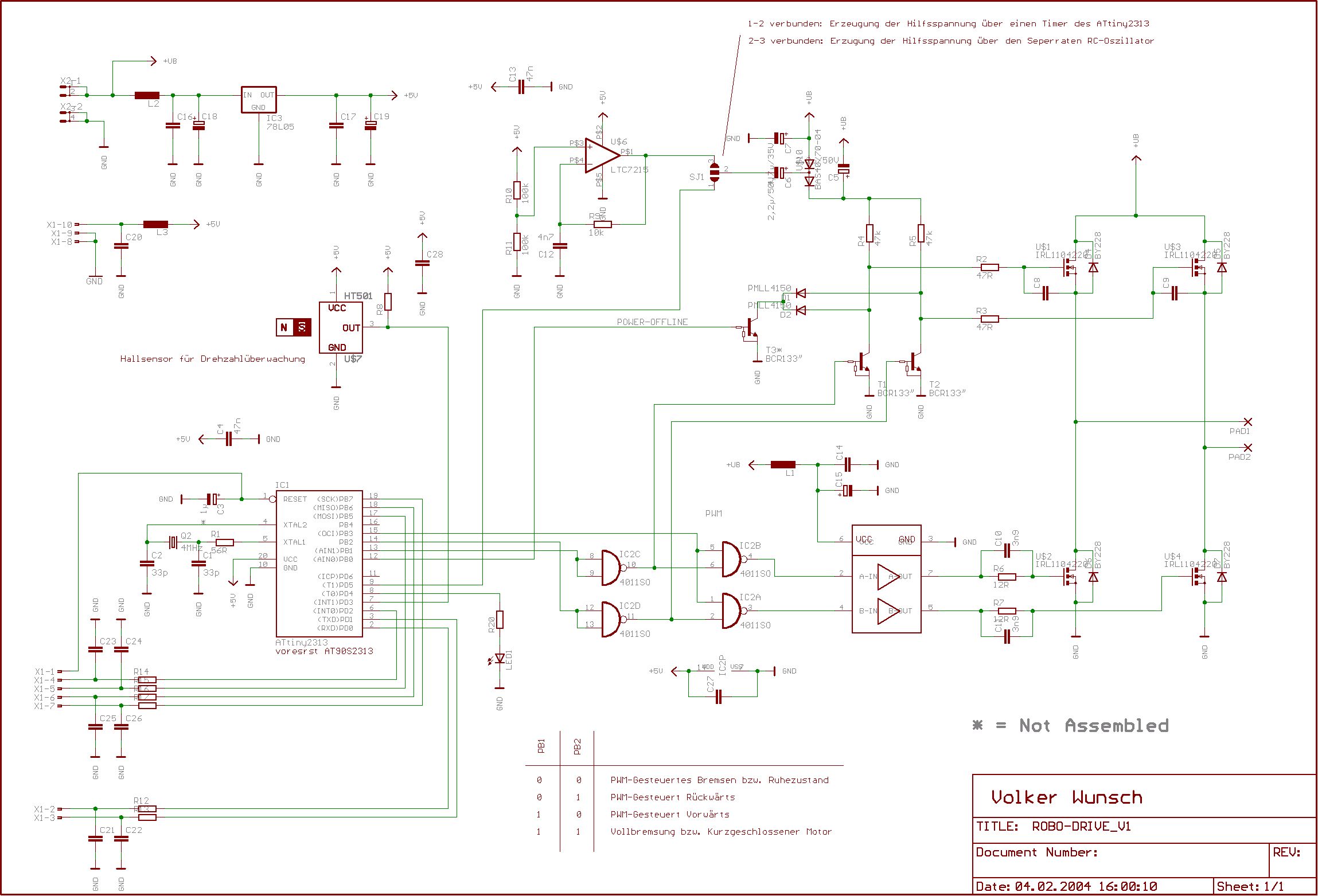
Hallo, ich ha vor einigen Wochen mal angefangen eine eigene Motorbrücke zu bauen. Die Eckdaten sind 24V, 6A dauer, 20A kurzzeitig beim Anlauf, PWM gesteuert fahren und bremsen, Drehzahl vorgeben und sie soll diese dann selbst kontrollieren und Lastabhängig nachsteuern. Ansteuerbar über rs232, SPI oder TTL-Pegel, (je nach Software). Die Schaltung ist noch nicht getestet und daher wollte ich mal Fragen, was ihr von dem Entwurf haltet. In Zukunft soll sie je einen Rollstuhlmotor in meinem Robotter steuern. MfG Volker
@Volker, wenn IC2 Pin 11 auf 0 geht, dann sperrt T2 und sein Collektorpotential (soweit es UGS erreicht) steuert U3 leitend. Über IC2 Pin 3 wird dises Signal invertiert und ist damit positiv. Ohne weitere Drehung wird es über den Treiber an U4 weitergeleitet und steuert diesen ebenfalls leitend. Das ist ein satter Kurzschluß! Nimm statt des NAND ein AND. Ich würde allerdings N/P Kanal Typen nehmen und auf die Hilfsspannung verzichten. Ohne Higside Treiber wird das mit dem Timing auch nicht sicher werden, die passive Einschaltung über die Collektorwiderstände ist nicht zu empfehlen wenn so hohe Ströme geschaltet werden sollen. Acht e auf kurze Wege zwischen den Signalpfaden sonst bekommst du zusätzliche Probleme durch Laufzeitvariationen der einzelnen Pfade. MfG Manfred Glahe
Halt, stop, der Treiber unten hinter den NAND ist invertierend (sieht man in dem Schaltsymbol leider nicht). Das mit den P-Kanal-Fets ist schon klar, jedoch haben die einen größeren RDS-ON. Die jetzt eingesetzten haben gerade mal 8 mOhm, was die Verlustleistung relativ gering halten sollte. Das mit dem Timing könnte jedoch wirklich zu einem Problem werden, doch was kann man da noch machen ? Die kurzen wege der Signalpfade hab ich schon realisiert (keiner länger als 1,5 cm). Gruß Volker
@Volker
"Die kurzen wege der Signalpfade hab ich schon realisiert (keiner
länger
als 1,5 cm)."
Das ist gut so, aber ich habe mich nicht präzise genug ausgedrückt. Ich
meinte den Zeitpfad, also möglichst wenige Bauteile in Reihe nach dem
Trennen der Brückenzweige, oder solche mit reproduktivem Zeitverhalten
(kein Jitter von Treibern oder Gattern).
Es gibt Highsidetreiber mit integrierter Ladungspumpe welche eine
externe Hilfsspannung überflüssig macht. Damit wird der Zeitpfad
erheblich genauer einzuhalten sein.
So lassen sich dann auch die "Totzeiten" zwischen zwei Umpolungen
präzise steuern und zum Bremsen auch klein halten.
MfG Manfred Glahe
Hallo Manfred, Ich hab gerade mal ein wenig nach den Highside-Treibern gesucht und bin auch bei einigen Herstellern fündig geworden, jedoch weis ich nicht, wo ich diese herbekommen soll. Keiner der Liferanten, die ich kenne haben auch nur irgend einen im Angebot. Von Farnell, RS und Bürklin mal abgesehen. Die sind schlichtweg zu teuer. Gruß Volker
@Manfred: Wenn ich einen Halbbrückentreiber (IR2104) mit verriegelung für die Steuerung jeweils einer Halbbrücke nutze, dann ist doch das timing vor dem Treiber nicht mehr kritisch. Oder wäre das falsch ? Gruß Volker
@Volker Ja das ist richtig, denn dann kannst du ja beide unabhängig sperren. MfG Manfred Glahe
@Volker Der IR2104 ist ein bißchen schlapp an seinen Ausgängen. Bei 'dickeren' FETs sind höhere Treiberströme immer von Vorteil, da die Gatekapazitäten durchaus bis 10nF betragen können. Geeignet wäre z.B der IR2184.
Wenn Du das Ding nicht unbedingt selber bauen musst dann schau dir mal http://www.robot-electronics.co.uk/shop/20A_H-Bridge_MD032008.htm oder http://www.robot-electronics.co.uk/shop/Dual_5A_H-Bridge_MD222034.htm an. Die Ansteuerung ist nur etwas kompliziert wenn ihr nicht irgendwo einen I2C Bus habt. grüsse jan
Hallo, danke für die Antworten Jan und Michael. Ich wollte das ganze schon selbst bauen, da ich dabei bestimmt wertvolle Erfahrungen sammeln kann. In meinem zukünftigen Fachgebiet (Nachrichtentechnik) hab ich nicht mehr so viel mit Leistungselektronik zu tun und von daher isses ganz gut sowas mal selbst gebaut zu haben. Zudem machts auch richtig Spass wenns mal knallt und stinkt (Hab schon fast mit einem anderen Studiengang geliebeugelt). Aber jetzt schluss damit.... Bin jetzt im 3. Sem. und bleib auch dabei. Hab die IRL2104 nun schon geordert und auch gleich noch ein paar IRL2101 für ein anderes Projekt. Meine Gate-Kapazität des IRF1104S beträgt ca. 3,3 nF. Sehr hohe PWM - Frequenzen will ich sowieso net fahren. Werd sie mir jedoch trotzdem mal zu gemüte führen. Bis die nächsten Tage denn. MfG Freddy
@Michael kannst Du mir die Begriffe Two-Phase Chopping, One-Phase Chopping und Enable Chopping beim L6203 ein bischen näher erklären und die Auswirkungen auf den Motor. Ich werde aus den Abbildungen im Datenblatt nicht so ganz schlau. Ich würde den L6203 auch gerne im Bereich 25V/2,5A einsetzen und Du scheinst einiges an Erfahrung zu haben in Bezug auf den L6203 Wenn ich keine Richtungsumschaltung brauche kann ich dann auch 2 Motoren mit jeweils 2,5A anschließen und wenn ja wie? Gruß Michael
Ich an mich oder doch nicht ? :-) Suche bitte nach 'APP6219.pdf' und 'APP6219-1.PDF' bei STM. Dort ist näher erklärt, wie das funktioniert und wozu das gut sein soll. Oder auch bei anderen Schrittmotortreibern unter slow und fast decay. Bei Schrittmotoren beeinflußt es die Laufruhe bei unterschiedlichen Drehzahlen. Bei meinen Anwendungen lassen ich ENABLE konstant aktiv. L6506 + 2xL6203 (Seite 3 bei app6219-1).
Michael an Michael ;-) unter www.st.com finde ich leider nicht die beiden App's. Hast Du vielleicht einen direkten Link? Gruß und Dank Michael
Tut mir leid, ich habe die Dateien neu benannt; ursprünglich sind es AN1495 und AN460. Die findet man aber auch nicht unbedingt auf Anhieb. Daher mache ich zwei Häppchen.
Und Nr. 2 Ach so: ich hatte die Ansteuerung verwendet, die geringste Verluste in der Endstufe verursacht.
Super Danke. Werde die mal durchlesen. Gruß Michael an Michael :)
Ich arbeite auch gerne mit der L6203, wurde aber gerne mahl erfahren wie denn wert fur den Sense wiederstand bestimmt wird. Habe jetz mehere schaltplane gefunden, alle mit andere werten. Fur einer antwort wahre ich sehr dankbahr.. Mfg Fred Stevens,
Hallo Hier meine bisher erfolgreiche Daumenregel: 1. Den Widerstand so klein wie möglich. Hier einfach daran orientieren was der Händler deines Vertrauens hat. IdR haben wir hier 0.5 oder 0.2 2. Nach Möglichkeit sollte kein Drahtwiderstand verwendet werden, geht aber auch mit Draht. Spezielle Shunts verwenden, die sind aber teuer. 3. Dann hängt es noch davon ab wie du die elektronik dimnensionierst mit der du messen möchtest. Je feiner Du messen kannst desto kleiner kannst Du die Widerstände wählen. Siehe dazu auch die Diskussion hier http://www.roboternetz.de/phpBB2/viewtopic.php?p=32429
Hallo Jan, Danke für deiner antwort. Ich habe ein schaltplan, der soll bei 15volt, 2A denn l6203 abschalten. Dort ist aber ein 0,27ohm drin. Sehe: http://people.freenet.de/Stefan-Haack/shboost.gif Daher verstehe ich das ganze auch nicht, weil ich der meinung binn, daß dort 2/15 = 0,13ohm rein sollte. Bei 0,27 ohm errechne ich doch 4A oder? Wo lieght mein denk fehler???? Ich habe einer art gleiche schaltung aufgebaut, aber ohne die 15v stabilisierung. Es kommt dan ca. 20v an, und ich mochte ab 4A abschalten. Dann wurde ich aber, 0,20 ohm benotigen oder? An einer fertig schaltung nach dieser angabe, ist aber 0,75 ohm drin. (2x 1R5 parallel) Vielliecht kannst du jetzt verstehen, wiso ich da nicht mehr durchblicke!! ;-( Meiner schaltung ist hier: http://www.miniware.nl/de/rre/img/ddw_ctrl1_sch_org.jpg
{kind=link}
{kind=link}
P = U*I = R*I*I D.h. Du suchst dir einen Widerstand der zu deiner Auswertelelektronik passt raus und berechnest dir dann wieviel Watt du einbauen musst. Also bei 0.5Ohm und 2A sind dies rechnerisch 2Watt, mit etwas Sicherheit also 5Watt. Je kleiner der Widerstand desto geringer ist der Spannungsabfall am Widerstand und desto mehr musst du das Signal verstärken, um es messbar zu haben. Gleichzeitig sinkt aber natürlich die Verlustleistung im Widerstand geringer je geringer der Widersand ist, siehe obige Formel.
Hmmm... Nicht sehr einfach fur ein digital freak!!! Es hat also nicht damit zu tun, wann der L6203 abschalted, es dient nur dazu daß mann die strom afnahme messen kann... Daher auch die unterschieden, weil jeder es an seiner auswert schaltung anpassen soll... hmmmm. Ich glaube ich blicke jetzt etwas besser durch... herzlichen dank. Ich versuche damit weiter zu kommen. Mfg Fred
Ich möchte gerne wissen wie Stabilisierung funktioniert, also wenn ich 220V auf 24V wandle. Ich weiß das es was mit den Kondensatoren und ihrer Dimensionierung zu tun hat. Vielleicht kennt ihr ja eine Seite? MfG Sven
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.