Hallo, momentan befasse ich mich mit diesen Quadrocopter: http://www.mikrokopter.de/ucwiki/ Dort bin ich grade beim BL-Regler zugange und möchte natürlich Mosfets nehmen die den Strom aushalten die der Motor braucht. Auf dieser Seite http://www.mikrokopter.de/ucwiki/BL-Ctrl_Anleitung#head-66f92e8c11eb7cded8ee1f18925a24f33f716811 gibts es nun die Aussage "Mit besseren MosFets sind auch dauerhaft 10A und kurzzeitig 20A möglich.". Aber dieser Mosfet, der dort am Anfang benutzt wird sind laut Datenblatt 44A möglich. Hier das Datenblatt vom IRFR1205. http://www.datasheetcatalog.org/datasheet/irf/irfr1205.pdf Kann mir das jemand erklären, ich verstehe as nicht ganz. MfG m-obi
:
Verschoben durch Admin
Die 44 Ampère überlebt der aber nur bei einer Halbleitertemperatur von 175°C. Und da kannst du bei dem Pupsgehäuse mal so ein halbes Kilo Kühlkörper mitrechnen, was auf dem Kopter sicherlich ungünstig wäre... Guck mal die Fußnote '5': > Calculated continuous current based on maximum allowable junction > temperature; Package limitation current = 20A
Wiso sollen mit einem Mosfet keine solchen ströme möglich sein? beachte 44A -> maximum Ratings
Mann, LESEN! Die Ströme sind möglich und zulässig. Aber nicht ohne Kühlung und nicht mit dem Gehäuse. Die 44A sind nur ein errechneter Wert, den der Halbleiter bei anständiger Kühlung theoretisch dauerhaft aushalten würde. Die Anschlussbeinchen und/oder thermischen Leitwerte des Gehäuses machen dauerhaft aber 20A mit.
Wer gründlicher hier liest, weiß anschließend mehr. Beitrag "Transistor + Kühlung für elektronische Last (ca. 80.150 Watt)"
Damian schrieb:
> beachte 44A -> maximum Ratings
Heh, da fehlt ein Wort: absolute maximum ratings
Und dann gilt noch Ziffer 5:1 | Calculated continuous current based on maximum allowable junction |
2 | temperature; Package limitation current = 20A |
Package limitation current 20A bedeutet nur, dass bei 21A die Bonddrähte durchglühen :-o
Das heißt aber das die Aussage auch nicht stimmt, weil der Moesfet doch 10A aushält und 20A auch kurzzeitig.
Mathias O. schrieb: > Das heißt aber das die Aussage auch nicht stimmt, weil der Moesfet doch > 10A aushält und 20A auch kurzzeitig. Das Datenblatt ist schon selten dämlich, erst 44A versprechen und dann in der Fußnote auf 20 A zu begrenzen. Aber für deine Anwendung ist was anderes wichtig und das ist in dem Mikrokopter-Beitrag wahrscheinlich auch gemeint: - du willst wenig Spannung am Mosfet verlieren - du willst wahrscheinlich keinen großen Kühlkörper verwenden, am besten gar keinen. Der IRFR1205 hat 27mOhm, bei 10A also 2,7W, bei 20A 10,8W Verluste, da musst du ordentlich kühlen. In der Auswahlliste für Mosfets hier auf der Seite findest du welche mit deutlich weniger Widerstand, so dass du zumindest bei 10A überhaupt nicht kühlen musst. Grüße, Peter
Ich hab mich mittlerweile auch schon fast ein Jahr mit dem Thema beschäftigt. Es gibt noch ne andere Limitierung: Bei dem BL Ctrl werden keine "gescheiten" MOSFET Treiber eingesetzt. Die Highside wird relativ hochohmig über ein paar Hundert Ohm ge-pull-upt. Die Lowside hängt direkt an den AVR Ausgängen. Dadurch werden die MOSFETs natürlich auch nicht optimal umgeladen, was bei Verwendung einer PWM (wie es bei Brushless Reglern der Fall ist) erhöhte Verlustleistung hervorruft.
>Das Datenblatt ist schon selten dämlich, erst 44A versprechen und dann >in der Fußnote auf 20 A zu begrenzen. das ist nicht seltendämlich, sondern ist halt so bei Mosfets üblich. Sinn ist, daß hier nicht unbedingt der Strom beworben wird, sondern hier geht es eher um den mit steigendem Imax sinkenden Rdson. Also hoher Imax ist meist gleichbedeutend mit niedrigem Rdson. Imax ist auch einfach nur das Maximum, was der Chip aushält - das sagt nichts darüber aus, was die Beinchen/Bonddrähte aushalten). Ganz einfach. Imax hat hier also eher informellen Wert (der zudem meist mit Ptot zusammenfällt - also Imax ergibt bei durchgeschalteten Mosi eine Verlustleistung in der Nähe von Ptot).
Simon K. schrieb: > Ich hab mich mittlerweile auch schon fast ein Jahr mit dem Thema > beschäftigt. > > Es gibt noch ne andere Limitierung: Bei dem BL Ctrl werden keine > "gescheiten" MOSFET Treiber eingesetzt. Die Highside wird relativ > hochohmig über ein paar Hundert Ohm ge-pull-upt. Die Lowside hängt > direkt an den AVR Ausgängen. > > Dadurch werden die MOSFETs natürlich auch nicht optimal umgeladen, was > bei Verwendung einer PWM (wie es bei Brushless Reglern der Fall ist) > erhöhte Verlustleistung hervorruft. Welche Mosfets nutzt du denn? Und hast du dich auch schon mit der Strommessung beschäftigt, ich würde da einen Präzisionswiderständ im mOhm-Bereich reinpacken anstatt solcher Leiterbahnenmäander. http://www.isabellenhuette.de/de/leistungswiderstaende/
Antworten: 1. In den Absolute Maximum Ratings ist der Betriebsbereich abgesteckt, bei deren Überschreiten das Bauteil sehr wahrscheinlich stirbt. Die erreichbare Dauerleistung des Bauteils hängt stark von der Kühlung ab. Fragen: 1. Warum nimmst Du einen 55V Mosfet, wenn Du mit 12V Betriebsspannung arbeitest? Sofern Deine Halbbrücke im Kommutierungsfall die Spannung begrenzt kannst Du bei einem guten Design mit maximal 40% Überspannung rechnen. Damit könntest Du einen 20V MOSFET nehmen -> Habe erheblich niedrigere RDSon als die höheren Spannungstypen!!! 2. Hast Du Dir mal die DirectFETs von IRF angesehen? Das Gehäuse hat keine Pins, aber in der Leistungsdichte kenn ich nichts besseres. http://www.irf.com/product-info/datasheets/data/irf6716mpbf.pdf Hat 39A bei 25°C Umgebungstemp. und 180A bei 25°C am Gehäuse!! 3. Woher stammt die Halbbrückensteuerung?? Der N-MOSFET ist ja noch OK, aber warum einen p-MOSFET nehmen? Der p-Typ hat 65mOhm und der N-Typ 27mOhm, damit macht der p-Typ die 2,5-fache Verlustleistung!! Außerdem passt der N-MOSFET nicht gut zu deiner Ansteuerung! Er wird vom uController mit irgendwas um die 5V am Gate betrieben. Laut Datenblatt liegst (Figure 2) Du da in der Region zwischen 10 und 20A Dauerstrom. Im Prinzip verschenkst Du Rds,on weil die Gatespannung zu niedrig ist. Vorschlag - nimm einen anständigen Gatetreiber (evtl mit Entsättigungserkennung) der ausreichend Spannung erzeugt und gut ist. 4. Wer erzeugt die Totzeit? Ich schätze man kann die Verluste Deiner Schaltung locker um den Faktor 3-4 senken auf derseleben Fläche :) - wenn es gut gemacht ist.
Tut mir leid ich habe die Schaltung nicht entworfen, sie stammt von dieser Seite. http://www.mikrokopter.de/ucwiki/ Hier ist der ganze Schaltplan: http://www.mikrokopter.com/ucwiki/BL-Ctrl_Anleitung?action=AttachFile&do=get&target=BL-Ctrl_Schaltplan.gif Und alle die die Schaltung nutzen, haben nichts zu bemängeln. Nur ich mache mir halt Gedanken, weil ich mir dachte, dass muss noch besser gehen und vorallem will ich an Fläche sparen und es sollte trotzdem zuverlässig funktionieren. Aber die Kombinationen von den P- und N-Mosfets wird tausenfach verwendet bei den BL-Controllern die es für die Modellbaumotoren gibt. Aber das muss so sein, damit du einmal Vcc und Masse schalten kannst. Nur sollten die Werte gleich sein und am besten abgestimmt auf die Verhältnisse, also Strom und Spannung. Und da bin ich halt grad bei.
Mathias O. schrieb: > Welche Mosfets nutzt du denn? IRLR7843. 3,3mOhm bei 30Vds > Und hast du dich auch schon mit der Strommessung beschäftigt, ich würde > da einen Präzisionswiderständ im mOhm-Bereich reinpacken anstatt solcher > Leiterbahnenmäander. > http://www.isabellenhuette.de/de/leistungswiderstaende/ Ja, das Problem ist aber die Verlustleitung. Ich benutze einen 10mOhm Leiterbahn-Shunt. Bei 10A liegt die Verlustleitung schon bei 1Watt. Ich glaube, das macht der BL Ctrl auch so. Einziger Unterschied: Meiner ist wesentlich länger und hat eine wesentlich größere Oberfläche. Somit verteilt sich die Verlustleistung über die Platine. Der Shunt bei den BL Ctrls ist ja bekannt dafür abzubrennen. Was ich sagen will: Einen Shunt mit mehr als 5mOhm wirst du wohl in einem so kleinen Gehäuse nicht gescheit gekühlt bekommen außer wieder über Viel Kupferfläche. Aber da sind wir dann wieder im Bereich, wo ein Leiterbahnshunt besser wäre.
Michael schrieb: > 2. Hast Du Dir mal die DirectFETs von IRF angesehen? Das Gehäuse hat > keine Pins, aber in der Leistungsdichte kenn ich nichts besseres. > http://www.irf.com/product-info/datasheets/data/irf6716mpbf.pdf > Hat 39A bei 25°C Umgebungstemp. und 180A bei 25°C am Gehäuse!! Die Dinger sind echt nett. Leider nicht handlötbar, was ziemlich ärgerlich ist. > 3. Woher stammt die Halbbrückensteuerung?? Der N-MOSFET ist ja noch OK, > aber warum einen p-MOSFET nehmen? Der p-Typ hat 65mOhm und der N-Typ > 27mOhm, damit macht der p-Typ die 2,5-fache Verlustleistung!! > Außerdem passt der N-MOSFET nicht gut zu deiner Ansteuerung! Er wird vom > uController mit irgendwas um die 5V am Gate betrieben. Laut Datenblatt > liegst (Figure 2) Du da in der Region zwischen 10 und 20A Dauerstrom. Im > Prinzip verschenkst Du Rds,on weil die Gatespannung zu niedrig ist. > Vorschlag - nimm einen anständigen Gatetreiber (evtl mit > Entsättigungserkennung) der ausreichend Spannung erzeugt und gut ist. Dass die Ansteuerung der BL Ctrl Mosfets Mist ist, habe ich oben auch schon geschrieben. > 4. Wer erzeugt die Totzeit? Niemand bei der Schaltung.
Mathias O. schrieb: > Und alle die die Schaltung nutzen, haben nichts zu bemängeln. Nur ich > mache mir halt Gedanken, weil ich mir dachte, dass muss noch besser > gehen und vorallem will ich an Fläche sparen und es sollte trotzdem > zuverlässig funktionieren. Das ist richtig. Bisauf den Shunt vielleicht. Das muss man der Schaltung lassen, sie läuft wohl zufriedenstellend. Besser geht es aber definitiv (und auch mit relativ einfachen Mitteln). > Aber die Kombinationen von den P- und N-Mosfets wird tausenfach > verwendet bei den BL-Controllern die es für die Modellbaumotoren gibt. > Aber das muss so sein, damit du einmal Vcc und Masse schalten kannst. > Nur sollten die Werte gleich sein und am besten abgestimmt auf die > Verhältnisse, also Strom und Spannung. Und da bin ich halt grad bei. Nein, das kann man so pauschal überhaupt nicht sagen. Besonders wenn es um höhe Ströme geht im Modellbaubereich sieht man sowas gar nicht mehr. Bei Brushless Motoren kann man sogar Mosfet Treiber mit eingebauter Charge-Pump-Möglichkeit (Solche, die ein Floating Gate haben) benutze und trotzdem einen PWM Duty Cycle von 100% pro Phase erreichen (weil selbst bei 100% pro Phase eine Phase nie dauerhaft an ist, es also die Möglichkeit für den Charge Pump Kondensator gibt sich aufzuladen). Ich verwende da IR2104 Treiber. Die Deadtime reicht für die IRLR7843 mit 4,7R Gate Widerstand gut aus.
Angehängte Dateien:
-

qc.png
7,3 KB
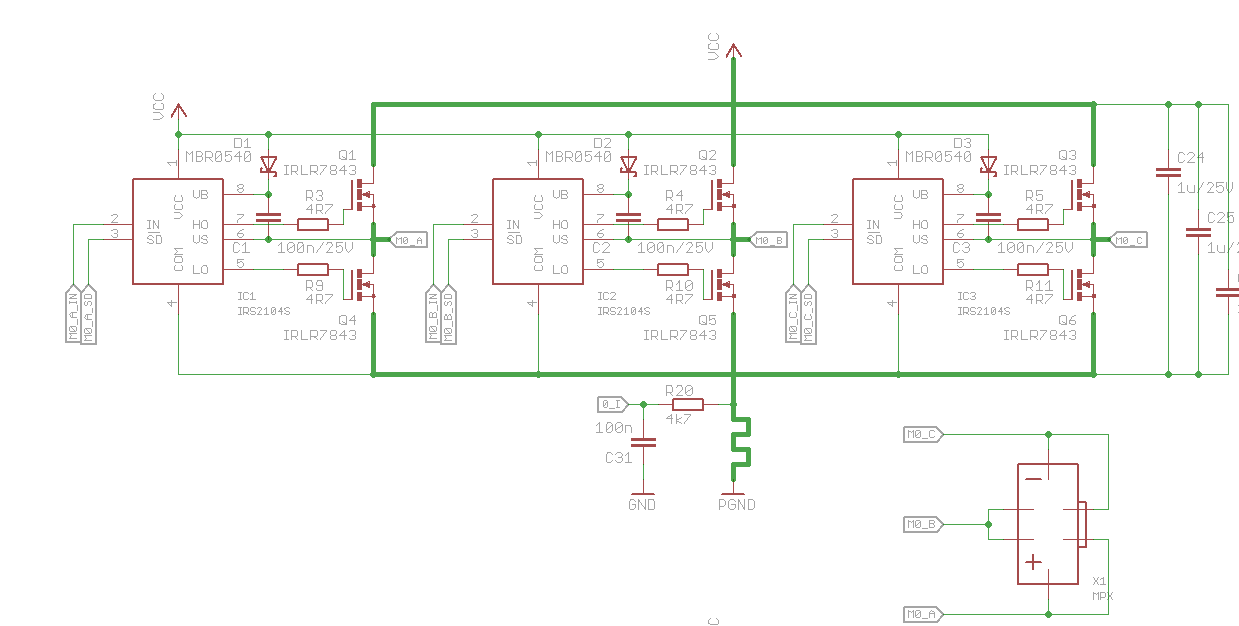
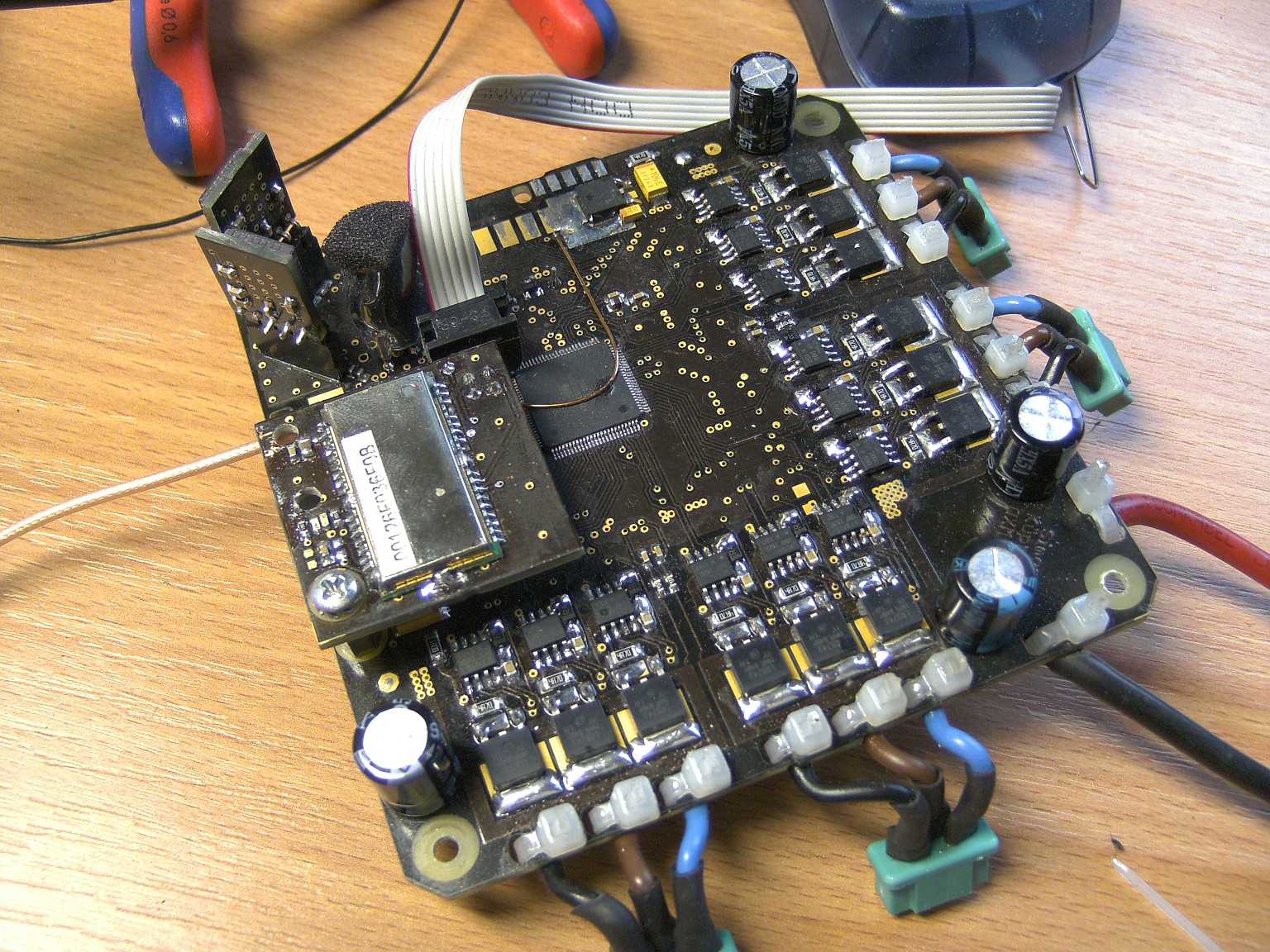
Leider hängt an meinen BLDC Reglern noch mehr dran: http://www.mikrocontroller.net/attachment/51580/Top.jpg Den Schaltplanausschnitt habe ich mal angehangen. An die IN Eingänge kommt entweder ein PWM Signal oder ein LOW Signal. An die SD Eingänge entweder HIGH oder LOW. Bei SD=LOW sind die Endstufen dann Tri-Stated (Immer eine Phase ist ja zu jeder Zeit Tri-Stated)
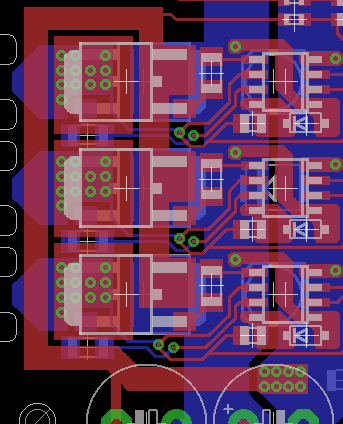
Das ist doch ein guter Entwurf. Ich sehe das grobe Komzept hast du auch übernommen von mikrokopter. Hast du als zentralen µC einen FPGA? Ich dachte der Shunt geht von GND zu dem anderen GND, wieso hast du das anders gemacht?
Mathias O. schrieb: > Das ist doch ein guter Entwurf. Ich sehe das grobe Komzept hast du auch > übernommen von mikrokopter. Hast du als zentralen µC einen FPGA? ATxmega128A1 > Ich dachte der Shunt geht von GND zu dem anderen GND, wieso hast du das > anders gemacht? Der Shunt hängt in dem einzigen Pfad (Auf der Lowside gegen Masse), wo alle Ströme aller drei Phasen her müssen. Der Widerstand und Kondensator ist dabei ein Tiefpass und geht an den A/D Wandler.
Und womit hast du dann das PGND verbunden? Hast du auf der linken Seite das GPS oder was ist das mit der Nummer drauf?
Ist ein BTM 222. PGND ist mit dem Akku verbunden. GND ist an einer Stelle mit PGND verbunden. GND ist das GND Netz für Analogkrams und Mikroprozessor. Der Quadrokopter fliegt übrigens noch nicht. Der ist noch in Entwicklung und das Layout auf dem Bild ist auch schon obsolet ;) Im Moment komme ich wegen Prüfungen und Urlaub nicht dazu.
Wo hast du denn gas GND mit dem PGND verbunden? Darf ich denn mal den Schaltplan sehen von dem gesamten BL-Ctrl und auch vielleicht von der Flight-Ctrl?
Mathias O. schrieb: > Wo hast du denn gas GND mit dem PGND verbunden? Na an einer Stelle auf der Platine. Damit der Motorstrom nicht durch den Analog/Digitalteil fließt... Macht man doch bei Analog/Digital Entkopplung auch so. > Darf ich denn mal den Schaltplan sehen von dem gesamten BL-Ctrl und auch > vielleicht von der Flight-Ctrl? Hm, nein :-)
Schade. Wie siehts aus, werden die Mosfets denn doll warm, hast du sie schonmal getestet?
Voll durchgesteuert haben die 3,3mOhm (bei 10Vgs). Das macht 330mW bei 10A. Für ein TO252 Package, wo noch möglicherweise ein Kupferkabel angelötet ist, sollte da keine starke Erwärmung auftreten. Zumindest wenn das Gate schnell genug umgeladen wird.
Ahh ok danke, kannst du mir noch sagen wie du den Shunt verlegt hast, Länge, Breite, evtl. Bild? Achja und vielleicht die Eagle-Lib von den beiden Teilen.
Angehängte Dateien:
-

qc.png
8,6 KB
Die LBR kann man sich selber schnell basteln. TO252 Gehäuse findet man in ref-packages und ne Library für den IR2104 findet man glaube ich sogar bei Cadsoft.
Also bei Cadsoft hab ich nichts gefunden. Hast du die Länge des Shunt berechnet?
Ja. Zumindest grob. http://de.wikipedia.org/wiki/Spezifischer_Widerstand#Berechnung_des_elektrischen_Widerstands Hat etwa 9mOhm. Für ne Überstromabschaltung reicht das.
Laut deinem Schaltplan nutzt du den IRS2104S, vorhin sagtest du IR2104S. Es gibt beide, welchen nutzt du denn jetzt?
Du bist aber auch hartnäckig. http://www.irf.com/technical-info/appnotes/an-1104.pdf Bei 3,3V sollte man besser IRS2104 nutzen. IR2104 geht aber auch (mit einem ATxmega 128A1).
Tja so bin ich halt, wenn mir was seltsam vorkommt, frag ich lieber nach, nicht das Missverständnisse entstehen. Also da ich mit 5V arbeite nehme ich den IR2104S.
Ja. Den IRS2104 bekommt man leider relativ schlecht und ungünstig. Es gibt aber noch viel mehr dieser Floating Gate Chips bei IRF
Wo hast du die Symbole bei Eagle her, die im Schaltplan die Verbindungen benennen, z.B. M0_A_IN?
Angehängte Dateien:
-

screenshot.png
16 KB
{kind=link}
{kind=link}
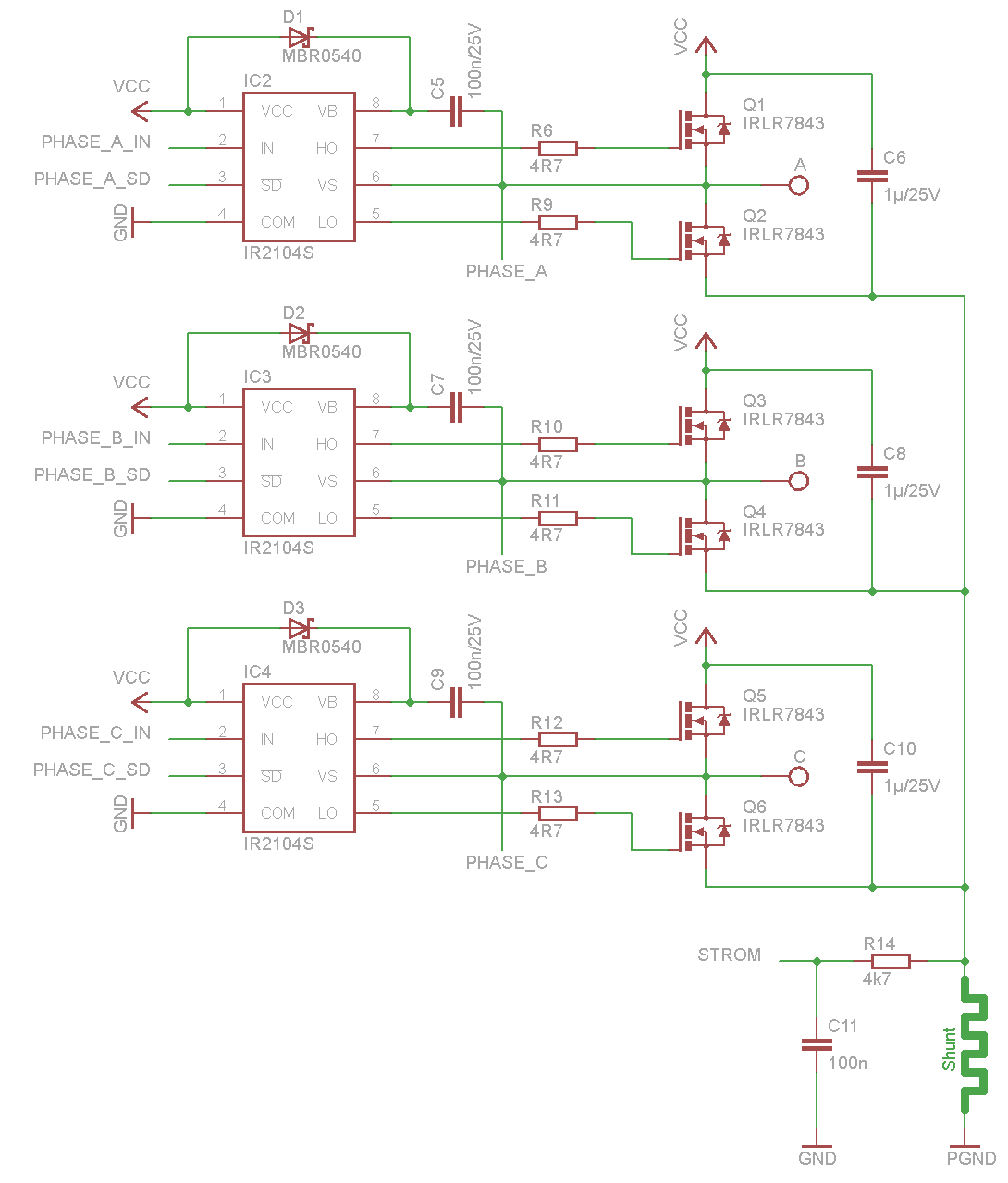
So hab jetzt mal den Schaltplan gemacht mit den 3 IR2104S und den 6 IRLR7843. Und wo hast du die Symbole bei Eagle her, die im Schaltplan die Verbindungen benennen, z.B. M0_A_IN?
@ Simon K.: Seit du deine Platine im Kunstwerke-Thread gepostet hast, frage ich mich, wie es bei deiner Kontruktion mit Strahlung aussieht. Normalerweise hat man den BL Controller sehr dicht am Motor, sodass die geschalteten Leitungen möglichst kurz ausfallen. Hast du mal geschaut, was die Radios in der Nähe des Copters empfangen?
Sorry, war im Urlaub. Die Symbole bekommst du mit dem Eagle Befehl LABEL. Das musst du dann oben in der Symbolleiste noch auf "XREF" umstellen. Ja, das mit der EM Abstrahlung habe ich auch zuerst befürchtet. Habe gestern 3 PWM Frequenzen ausprobiert. 64, 32 und (wie beim Mikrokopter) 16kHz. Mit dem Resultat, dass bei 64kHz der Empfang der 35MHz Funkanlage sehr gestört ist. Bei 16kHz jedoch so gut wie gar nicht mehr. Ich denke nicht, dass es ein so großes Problem ist. Von der Mitte bis zu den Motoren sind es höchstens 30cm Kabel. Außerdem kommt hinzu, dass zwar in einem der drei Drähte Strom fließt (und somit ein Magnetfeld erzeugt wird) aber in einem zweiten der drei Drähte auch wieder der gleiche Strom zurückfließt. Somit sollten sich die Felder so gut wie aufheben. Bezüglich Störung des Controllers konnte ich hingegen noch nicht das Geringste feststellen(!). Der läuft und läuft und läuft. Und das sogar ohne externen Reset-Pullup (Den darf man nicht verbauen, weil RESET Teil des Programmierinterfaces ist). Bin jetzt mittlerweile so weit um den Lageregler auszuprobieren.
Habt ihr mal dran gedacht so einen fertigen BLDC-Controller umzuprogrammieren? Gibts für etwas über 20 Euro, mit ähnlichem Schaltplan. Atmega8 µC, 3x IR2103 Treiber, 24x Si4404 N-Kanal MosFET, 2x 2931-M5.0 Low-Drop Regler, 1x Charge Pump auf 12V als Gate-Spannung, Optokoppler, Hühnerfutter. Die ISP-Pins am Atmega wären noch frei, liesse sich also umprogrammieren. Dummerweise sind viele der µC-Interfaces belegt, z.B. UART RX/TX mit einem Ausgangskanal, SDA als Analog-Eingang. Debuggen über RS232 und schnelle Steuerung über I²C ginge also nur wenn man die etwas umlötet. Wäre eh praktisch um die Low-Side Treiber an die PWM-Ausgänge zu bekommen...
Ja, im Mikrokopter Forum kann man da ne Menge zu lesen. Schau mal hier: http://forum.mikrokopter.de/topic-830.html
Mathias O. schrieb:
> Den Pull-Up für den Reset Pin macht man doch immer oder nicht?
Eigentlich hat der Chip nen 20kOhm Pullup integriert. Weniger ist
problematisch, weil das Programming Interface dann nicht mehr
funktionieren könnte.
Weil der bei alten AVR's (AT90...) und Atmel '51ern dringend nötig war. Die neueren AVRs haben einen Pull-Up integriert, und einen Brown-Out-Detektor. Da macht der externe Pull-Up nur noch Sinn, wenn die Schaltung in extrem "verseuchter" Umgebung laufen soll. Übrigens, die neueren AVRs können sogar ganz OHNE Reset-Pin laufen! (Über fuse-Bit lässt sich der Reset-Pin in einen IO-Pin unwandeln) Da braucht's dann erst recht keinen Pull-Up mehr ;)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.