Hallo, ich suche einen Beschleunigungssensor der über 3-Achsen messen kann. Bei dem man einen Threshold über alle drei Achsen einstellen kann. Denke mal einen Digitalen. Also eingestellt auf 3g, wenn nun z.B. auf X=1g Z=0,5g und Y=1,5g einwirken soll was ausgelöst werden. Ich hab schon den MMA7455L gefunden der das unterstütz, aber der macht dies nur für jede Achse einzeln, ich bräuchte aber alle Werte zusammen Addiert, sprich die Einwirkung auf den Sensor im gesamten. Hat da jemand mal was gesehen???
Ja hab ich mir auch schon überlegt, jedoch möchte ich auch negative g's registrieren können, also beispiel bei 1,5g=2V und bei -1,5g=1V (0g wer dann bei 1,5V) soll was ausgelöst werden.
hallo! ich häng mich hier mal dran da ich ein sehr ähnliches problem hab, auch mit einem mma chip. der chip gibt in ruhe 1,65V aus (0g) und bei -6g 0V, bei +6g 3,3V. nun will ich aber nur den betrag ausgeben, also zb 0g-1,65V, +6g-> 3,3V, -6g auch 3,3V. (will nix schalten, der spannungswert regelt direkt die lautstärke usw) ich hab schon nachgegrübelt aber aber mein ansatz kommt mir kompliziert vor: einen invertierenden und nichtinvertierenden verstärker nebeneinaqnder und wenn die spannung unter 1,65 geht auf den invertierenden umschalten sonst den nichtinvertierenden nehmen. gibts da nichts einfacheres?
ja genau hab mal ne platine damit bei sureelectronics mitbestellt. gibts aber auch bei farnell, versuch grad daraus für nen freund ein lichtschwert-soundmodul zu bauen( brummen lauter bei schneller bewegung, zischen beim aufschlag usw)
HI, zu dem Poblem mit dem Betrag bilden. hast du mal einen comperator auf 1,65V der einen Verstärker um schaltet in betracht gezogen, soll heißen ein 2. OP als Verstärker und den von nicht invertirend auf invertierend umschalten mit nem multiplexer. Wenn du die verarbeitung im µC machst dann gehts in der SW einfacher.
Das Addieren der einzelnen Beschleunigungskomponenten liefert nicht den Betrag der Beschleunigung. Beispiel: X: 6g, Y: -6g, Z: 0g ergibt "in Summe" 0g, was aber physikalisch keinen Sinn ergibt. Den Betrag der Beschleunigung kann man ganz einfach über den Pythagoras berechnen:
Analog wüsste ich jetzt nicht wie ich diese Formel umsetzen soll - wobei ich mir vorstellen kann dass es zumindest irgendwie in Näherung möglich ist. Digital, mit einem µC ist das ganze aber kein Problem. Zum Lichtschwert sollte man sich die Schaltung des aktiven Gleichrichters mal ansehen. Das Prinzip kann man mit einem Inverter (virtueller GND bei 1,65V) erweitern. Der aktive Gleichrichter parallel (Anm. entkoppelt durch die Dioden) mit dem invertiertem geschaltet setzt dann Beschleunigungen von -6g - 0g - 6g in Spannungen von 3,3V - 1,65V - 3,3V um. Der Materialbedarf liegt bei 2 OPVs, 2 Dioden, und 4 Widerständen (jeweils 2 für virt. GND und Inverter) pro Achse. Für eine mehrachsige Lösung bringt das aber auch nicht viel, wie ich in den ersten beiden Absätzen erläutert habe. Wenn das gewünscht ist, sollte man gleich zum µC greifen. Reinhard
Reinhard R. schrieb: > Das Addieren der einzelnen Beschleunigungskomponenten liefert nicht den > Betrag der Beschleunigung. Beispiel: X: 6g, Y: -6g, Z: 0g ergibt "in > Summe" 0g, was aber physikalisch keinen Sinn ergibt. Den Betrag der > Beschleunigung kann man ganz einfach über den Pythagoras berechnen: >
> > Analog wüsste ich jetzt nicht wie ich diese Formel umsetzen soll - wobei > ich mir vorstellen kann dass es zumindest irgendwie in Näherung möglich > ist. Digital, mit einem µC ist das ganze aber kein Problem. Wenn man den genauen Beschleunigungswert nicht braucht, könnte es ausreichen, einfach die Beträge der drei Beschleunigungskomponenten zu addieren. Dabei werden Beschleunigungen < 1 unter- und die > 1 überbewertet. Zusammen mit dem Vorschlag von Tecnologic mit dem Comparator gibt das dann 3 Comparatorschaltungen und einen OpAmp, der die gleichgerichteten Ausgangssignale der Sensoren addiert.
Dadurch wird aber keine Genauigkeit gewonnen. Wenn der Sensor alleine auf 3g eingestellt wird, schaltet er im schlimmsten Fall bei 5,2g (=3g*Wurzel(3), bei 3g auf allen Achsen). Falls man die Summe der Beschleunigungsbeträge verwendet schaltet der Sensor im schlimmsten Fall bei 1+1+1g, was einer absoluten Beschleunigung von 1,73g (=3g/Wurzel(3)) entspricht. Das Verhältnis von minimaler zu maximaler Schaltschwelle bleibt gleich, nur mit dem Unterschied dass die eine Lösung in Richtung der Sensorachsen am empfindlichsten ist und im anderem Fall am unempfindlichsten. Reinhard
Günther Grundböck wollte das alles ja direkt und ohne µC machen. Dann muß er eben mit gewissen Eigenheiten der Miemik zurecht kommen ;-) Beitrag "Re: Beschleunigungssensor mit Threshold"
Hi >Günther Grundböck wollte das alles ja direkt und ohne µC machen. Dann >muß er eben mit gewissen Eigenheiten der Miemik zurecht kommen ;-) Da braucht es auch nicht unbedingt einen µC. Ein etwas zweckenfremdeter LM3914 und ein paar Dioden, Widerstände reichen. MfG Spess
Edit: Ich bezog mich auf das Posting von Uhu Uhuhu. Von keinem µC hat er da nichts geschrieben, aber sein Bedürfnis nach einer einfachen Lösung läuft wohl auf das Gleiche hinaus. Für das Lichtschwert dürfte eine gewisse Winkelabhängigkeit auch kein besonderes Problem sein. Ich habe mich jetzt aber auf den Poster "Bach" bezogen. Dem ist offensichtlich das was der Sensor alleine kann nicht genau genug. Die Summenlösung ist aber auch nicht besser. Mit einer Kombination könnte man das aber ein wenig verbessern (wenn Einzelachse über 3g, oder Summe über 5,2g). Reinhard
Angehängte Dateien:
-

123.GIF
5,3 KB
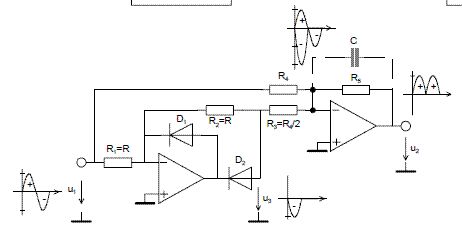
Wie würde nun die Schaltung von Reinhard R. aussehen??? Ich hab die Schaltung in meinem Anhang gefunden, wie könnte man ihm nun sagen das die 0Volt Linie bei 1,65Volt ist??? Also alles was dadrunter ist soll nach oben invertiert werden.
Angehängte Dateien:
-

Gleichrichter_Offset.png
2,3 KB
{kind=link}
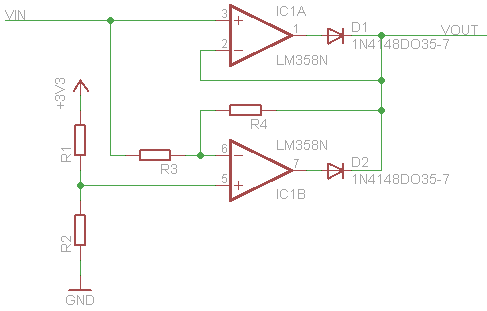
Bach schrieb: > Wie würde nun die Schaltung von Reinhard R. aussehen??? Das hängt davon ab welche du jetzt meinst. Bevorzugt würde ich sagen Sensor -> Tiefpass -> AVR. ;-) Wenn es analog sein soll ist der erste Schritt die Betragsbildung. Das was ich vorgestern um 16:10 gemeint habe sieht in etwa so aus wie der Anhang. Das Prinzip ist simpel. Der obere Zweig ist ein aktiver Halbwellengleichrichter. Der untere Zeig ein inverter mit Offset 1,65V. Dabei gilt R1=R2, R3=R4. Aufgrund der Dioden ist der Zeit mit der höheren Spannung dominant. Da der Feedbackkreis jeweils "hinter" den Dioden beginnt wird deren Vf gleich mit kompensiert. Die OPV brauchen dafür natürlich eine Versorgungsspannung die entsprechend größer als 3,3V ist. Das hängt auch davon ab wie nahe der Ausgang an die positive Versorgungsspannung ran kommt. Das wird für die weiteren Achsen wiederholt, die Ergebnisse addiert, und bei einer Summe von 5,2g ausgelöst. Zusätzlich löst der Sensor bei 3g aus, was mit dem vorigen Signal OR-verknüpft wird. Diese Schaltung ist dann immer noch in ihrer Empfindlichkeit winkelabhängig, aber nicht mehr so stark wie der Einzelachsen- bzw. der Summenansatz alleine. > Ich hab die Schaltung in meinem Anhang gefunden, wie könnte man ihm nun > sagen das die 0Volt Linie bei 1,65Volt ist??? Also alles was dadrunter > ist soll nach oben invertiert werden. Indem du an die nichtinvertierenden Eingänge der OPVs 1,65V statt GND anlegst. Der Ausgang wird dann einen Bereich zw. 1,65 und 3,3V annehmen. Du musst dir dann noch ansehen ob der Versorgungsspannungsbereich der OPVs ausreicht. Die von dir gepostete Schaltung ist für eine symmetrische Versorgung ausgelegt. Reinhard
schon mal den SMB380 angeschaut ? Ich kenn ihn so genau nicht im Detail. Ich habe aber mal gehört, er könne sowas. http://www.olimex.com/dev/pdf/OTHER/SMB380_Preliminary_Datasheet_Rev13_20070918.pdf
das ganze soll ja analog bleiben!!! wenn ich von den schaltung jetzt 3 aufbauen würde und alle Vout miteinander verbinde um sie sozusagen zu addieren, würde es dann probleme geben?
Einfach miteinander verbinden funktioniert nicht. Die Schaltung so wie sie gezeigt ist kann aufgrund der Dioden nur als Stromquelle, nicht aber als Senke arbeiten. Am Ausgang ist deshalb noch ein Pull-Down Widerstand notwendig. Den hätte ich gleich dazu machen sollen. Um die Summe zu bilden brauchst du einen Addierer, aber es geht auch einfacher. Die Ausgänge können über Widerstände parallel geschalten werden, so dass am Ende der Mittelwert der Spannungen anliegt. Für deine Zwecke ist es unerheblich ob du mit dem Mittelwert oder der Summe arbeitest. Die Pull-Down Widerstände dürfen dabei maximal den halben Widerstand der nachgeschalteten Widerstände haben damit der Zustand der einzelnen Ausgänge immer definiert bleibt (Worst Case Szenario, 2 Achsen auf 3,3V eine auf 1,65V). In der Praxis ist wegen der Toleranzen ein noch etwas größeres Verhältnis notwendig. Eine Frage noch zur Physik die dahinter steckt: Wie genau bzw. isotrop muss das eigentlich sein. Normalerweise misst du ja immer die Erdbeschleunigung mit, was schon einmal einen Offset von 1g ergibt. Wenn dir Orientierung variabel ist, ändert sich auch dieser Offset. Im Worst Case sind das also schon mal +/- 1g. Das hast du hoffentlich schon berücksichtigt. Reinhard
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.