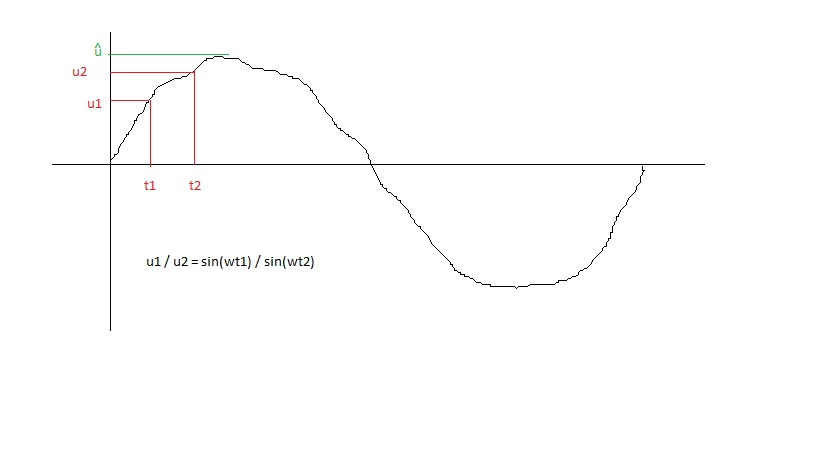
Hallo liebes Forum, Würdet ihr mir bei folgendem Problem weiterhelfen. Ich möchte die Frequenz eines Synchrongenerators messen. Nicht nur einfach im stationären Zustand, sondern auch dynamisch, wie z.B. eine Sprungantwort. Fängt die Welle gerade an zu drehen, ist auch die Frequenz klein, angenommen 1 Hz, mit den bekannten Messverfahren müsste ich nun 1 sec warten, um das erste Messergebnis zu bekommen. Nun könnte man ja herumformeln und sich nur einen kleinen Teil der Sinusschwingung (mit dem Oszilloskop) herauspieken z.B. zwei Werte und daraus die Frequenz berechnen. Nur leider steigt bei dem Generator ja auch die Spannung stetig mit was bedeutet, dass ich die Amplitude gar nicht kenne, damit ists aus mit dem herumformeln, zuviele Unbekannte. Die Messung selbst soll halt nicht lange dauern. Vielen Dank für eure Antworten. Borger
Angehängte Dateien:
-

sinus.png
24 KB
>mit den bekannten Messverfahren müsste ich nun 1 sec warten
Nö, ne halbe Sekunde. Eine Halbwelle reicht wenn das
Signal symmetrisch ist. Gleichrichten!
>Fängt die Welle gerade an zu drehen,
Papp dir dir doch sowas wie bei ner Maus an die Welle.
So ne Lochscheibe mit, was weiss ich, 50 Impulsen pro
Umdrehung. Dann kannste noch schneller die Drehzahl
bestimmen.
Ich möchte mit der Messung auch beweisen, dass es zwischen Drehzahl und Ausgangfrequenz keine Verzögerungen gibt. Es gibt nämlich in der Literatur Tachogeneratoren, die PT1 verhalten haben sollen. Das bedeutet, ein Drehzahl messer muss eh dazugehören. Aber danke.
Man sollte genauer wissen -ob es reicht pro Umdrehung 1 Impuls zu messen -oder besser Gabellichtscharnke und Zahnrad mit 100 Zähnen um die Gleichmäßigkei einer Umdrehung zu prüfen
Theoretisch sollte das gehen, indem man die Taylorentwicklung für den Sinus rückwärts anwendet, allerdings nicht aus nur zwei Messwerten. In der Nähe des Nulldurchganges erhält man bereits mit einer Taylorreihe 3. Grades eine recht gute Näherung des Sinus. Diese Reihe entspricht einem Polynom 5. Grades. Um bei einem Polynom 5. Grades die Koeffizienten zu bestimmen sind 6 Punkte (Messwerte) nötig. Hat man die Koeffizienten bestimmt, kann man die Frequenz des zugrundeliegenden Sinus näherungsweise berechnen. Wenn man auch weiter vom Nulldurchgang entfernt noch eine gute Näherung erhalten will, braucht es Taylorreihen höheren Grades. 7. Grad dürfte eine brauchbare Näherung über eine komplette Halbwelle ergeben, das entspricht einem Polynom 15. Grades, es werden also 16 Messwerte benötigt. Zu beachten ist, dass die verwendeten Messwerte immer alle in dem Bereich liegen müssen, in dem die verwendete Taylorreihe eine gute Näherung des Sinus liefert, also müssen z.B. im zweiten Fall oben alle 16 Messwerte innerhalb einer Halbwelle liegen, du brauchst also eine Abtastrate, die mindestens 32mal (besser mehr) so hoch ist wie die Sinusfrequenz! Der Rechenaufwand steigt dabei kubisch mit der Zahl der betrachteten Messwerte. Wie hoch die Auswirkungen von Messfehlern auf das Ergebnis sind wäre auch noch zu betrachten, das kann aber jemand anderes machen ;-) Andreas
Wenn das Signal abgesehen von der variablen Frequenz Sinusfürmig ist, könnte man die Signalform digitalisieren und dann an die letzen z.B. 10 ms oder so einen Sinuskurve anpassen. Vermutlich gleich mit Frequenzabhängoger Amplitude. Die Zeit die man braucht, hängt dann nurnoch davon ab, wie stark das Signal gestört ist. Allerdings ist der Rechenaufwand schon relativ hoch, zumindestens für einen µC, für einen PC wäre das wohl kein nennenswertes Problem. Ein einfache Form, z.B. für Startwerte wäre es die 2 te Ableitung zu bestimmen, und die mit der Kurve selbst zu vergleichen. Ohne Störungen ist das Verhältnis -(2 pi f)^2.
Eure Sinus-Theorie geht davon aus, daß die Sinuswellen pro Umdrehung gleichmäßig sind. Das halte ich für zu optimistisch. Wenn die Welle einen Lastwechsel hat oder Phasenschnittsteuerungen die Impulsform verfälschen werden Ihr ungenau. Da wäre ich eher für die Variante mit z.B. 360 Zähnen die je einen Impuls liefern. Das wären für 360 Grad 360 Impulse. Damit könnte man auswerten, daß z.B. der 13. Impuls immer etwas später kommt und dort die Welle belastet wird (solange die Geometrie stimmt).
Borger schrieb: > Ich möchte mit der Messung auch beweisen, dass es zwischen Drehzahl und > Ausgangfrequenz keine Verzögerungen gibt. Bei Licht betrachtet brauchst du für diesen Nachweis garnicht die Frequenz der Ausgangsspannung messen, schon garnicht mit hoher zeitlicher Auflösung. Du brauchst nur nachzuweisen, dass Drehwinkel und der Verlauf der Ausgangsspannung miteinander (über den Sinus) korrelieren. Also brauchst du "nur" über deine gesamte Messung den Drehwinkel und die Ausgangsspannung mit ausreichender zeitlicher Auflösung aufzeichnen, und kannst dann den direkten Zusammenhang zwischen den beiden Kurven nachträglich "nachweisen". Andreas
Unter der Annahme, dass das Signal wirklich sinusfoermig ist, brauchst Du zumindest theoretisch bloss drei Messungen des Signals (zu verschiedenen Zeitpunkten) und kannst dann die Sinuskurve berechnen: U(t) = A * sin (2*pi*f*t + p) wobei A = Amplitude f = Frequenz t = Zeit p = Phase pi = 3.13159... Also drei gemessene (U(t),t)-Paare reichen, um die drei Unbekannten (A, f, p) zu bestimmen. Natuerlich ist es in der Praxis besser, mehr als drei Messungen zu haben, dann kann man einen Least-Squares-Fit machen. Der Levenberg–Marquardt-Algorithmus ist fuer so multidimenasionale Fits bestens geeignet (siehe z.B. "Numerical Recipes in C"). Mit vielleicht 6-10 Messungen haelt sich der Rechenaufwand und Speicherbedarf dafuer in engen Grenzen. Wolfgang
Wolfgang M. schrieb: > U(t) = A * sin (2*pi*f*t + p) [...] > Also drei gemessene (U(t),t)-Paare reichen, um die drei Unbekannten (A, > f, p) zu bestimmen. Die Sinusfunktion ist periodisch, deshalb funktioniert das nicht ohne weitere Rahmenbedingungen. Geeignete Rahmenbedingungen zu finden ist nicht ganz trivial, wenn die mögliche Frequenz sich über mehrere Dekaden erstrecken kann. Andreas
Einen Sinus in das Signal hineinlegen geht nicht so ohne Weiteres, weil beim Beschleunigen oder Abremsen der Sinus ja keine konstante Periode hat. Wenn die Drehzal zu gering ist, mußt du sie künstlich erhöhen. Also, so wie oszi40 schon sagte, einfach einen Drehwinkelgeber, eine Lochscheibe oder etwas ähnliches auf die Welle packen, die Zeit zwischen zwei aufeinander folgenden Impulsen messen und daraus die Drehzahl berechnen. Kai Klaas
Synchrongenerator? Die Amplitude ist die Frequenz ist die Amplitude. Die Beschleunigung ist endlich und deterministisch und bei Stillstand null. Wo liegt das Problem?
vielleicht hilft dir ja sowas : integrated rotational speed sensor www.nxp.com/documents/data_sheet/KMI15_1.pdf gruss klaus
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.