Hallo zusammen!
Neulich habe ich mir einen kleinen Flieger mit einem Deltaleitwerk
gebastert, der nun einen Delta- Mischer bekommen soll. Und genau den
wollte ich mir selber machen mit nem AVR.
Das Prinzip vom Mischen der Kanläe verstehe ich ja auch das verrechnen
(invertieren) geht wunderbar. Nur bei der Signalausgabe happert es ein
wenig. Ich habe schon so einiges versucht, aber mein Oszi und ich können
uns einfach nicht einigen.
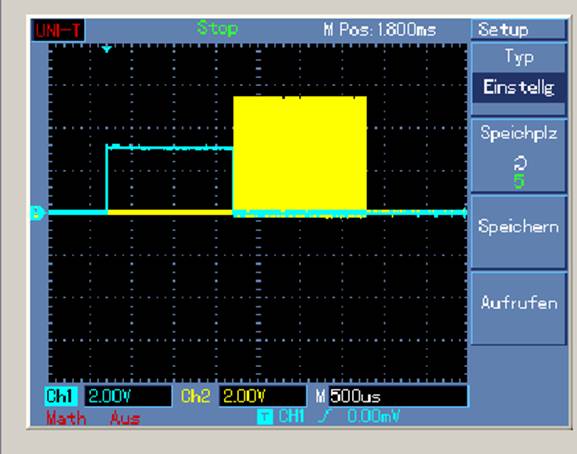
Im Anhang ist das Bild des Oszi zu sehen, wobei blau das Signal des
Empfängers darstellt und das Gelbe, das vom AVR erzeugte Signal ist.
Mit einer IF-THAN-ELSE- Schleife invertiere ich die Variabel A solange,
bis das Signal am empfänger abfällt. Dabei habe ich in der Schleife eine
Wartezeit von 1us, also habe ich am bei Mittelstellung (1.5ms) ca.
1500us.
Die Durchlaufzeit bei 10MHz ist so gering, dass mich da die
Signalverfälschung nicht weiter stört.
Die Variabel A wird nun auusgegeben, indem ich wieder eine warteschleife
mache und dabei jedesmal um 1 runterzähle. Und genau da liegt das
Problem. anstelle am Ausgang ein brauchbares Signal zu erhalten, habe
ich ne Rechteckkurve von jeweils 5ns! Die gute Nachricht ist jedoch,
dass sich meine Pulsvolge proportional zur Signalkurve des Empfängers
verhält. (1:1)
Hier mein Code, ich weiss echt nicht, was da noch falsch ist.
Ich bin noch nicht fertig damit, ich möchte nur mal eine Pulszeit messen
und sie Wieder ausgeben, das ist alles. dDas beimischen des Höhensignals
kommt dann noch. Die Berechnung für das 2te Querrudersignal ist jedoch
schon gemacht, das müsste soweit gehen.
Habt ihr eine Idee was man da machen kann?
Ich sage schon einmal DANKE!
Code:
$regfile = "m48def.dat"
$crystal = 10000000
$baud = 9600
'=============================== Servo einlesen
Config Pind.4 = Input
Config Pind.3 = Input
Servo1_h_in Alias Pind.4
Servo2_s_in Alias Pind.3
'=============================== Servo ausgeben
Config Pinc.1 = Output
Config Pinc.2 = Output
Servo1_out Alias Pinc.1
Servo2_out Alias Pinc.0
'===============================
Dim Servo1_h_in As Bit
Dim Servo2_s_in As Bit
Dim Servo1_out As Bit
Dim Servo2_out As Bit
Dim A As Integer
Dim B As Integer
Dim C As Integer
Dim D As Integer
Dim E As Integer
Dim U As Integer
Dim V As Integer
Dim W As Integer
Dim Z As Integer
Dim K As Integer
Dim Q As Integer
Dim X As Integer
Waitms 100
Main:
A = 0
B = 0
C = 0
D = 0
E = 0
Do
If Servo1_h_in = 1 Then
Goto Servo1
End If
Loop
Servo1:
Do
If Servo1_h_in = 0 Then
Goto Servo2
Else
Incr A
Waitus 1
Loop
End If
Servo2:
Do
If Servo2_s_in = 0 Then
Goto Ausgabe_quer
Else
Incr B
Waitus 1
Loop
End If
Ausgabe_quer:
C = A - 1500
D = C + 1
K = D * -1
E = K + 1500
Do
If A > 0 Then
Sbi Pinc , 1
Decr A
Waitus 1
Loop
Else
cbi Pinc , 1
Waitms 5
Goto Main
End If
'Ausgabe_quer_1:
'Do
'Set Servo2_out
'If E < 1 Then
'Else
'Reset Servo2_out
'Goto Main
'End If
'Decr E
'Waitus 1
'Loop
End
Grüsse
Und jetzt schau mal, wo das schliessende Loop zum Do steht.
Sicher bin ich nicht, aber zumindest sieht es nicht vernünftig aus.
Was spricht gegen
1
Sbi PinC, 1
2
3
while A > 0
4
Decr A
5
Waitus 1
6
wend
7
8
cbi PinC, 1
9
Waitms 5
10
goto main
AUch wenn die Programmiersprache BASCOM heißt, solltest du dir trotzdem
einen strukturierten Ansatz angewöhnen und auf goto quer durchs Gemüse
verzichten. Es führt genau zu diesem schwer zu durchschauenden,
unwartbaren Spaghetticodestil, der zu recht verpöhnt ist.
Oke, danke!
Ja ich werde es mir angewöhnen ;-)
Also das Programm läuft noch immer nicht, jedoch sieht das Signal schon
etwas anders aus.
Das gelbe Signal wechselt jetzt bei jeder fallenden Flange des blauen
Signals, die eigene. Also "(blau=0/ gelb=0), (blau=1/ gelb=0), (blau=0/
gelb=1)"
Überarbeite deinen Code komplett.
Rücke ihn ein, sieh zu dass du die goto los wirst. In deinem Code kannst
du fast alle goto mittels einem while erschlagen.
Ach was solls
1
...
2
3
Waitms 100
4
5
Do
6
' warte auf die steigende Flanke
7
while Servo1_h_in = 0
8
wend
9
10
' die Flanke ist da, jetzt die Laenge des 1 Pulses ausmessen
11
A = 0
12
while Servo1_h_in = 1
13
Incr A
14
Waitus 1
15
wend
16
17
18
19
' den Ausgabepuls erzeugen
20
' dazu den Ausgabepin auf 1 ...
21
Sbi PinC, 1
22
23
' ... und die Pulslänge absitzen ...
24
while A > 0
25
Decr A
26
Waitus 1
27
wend
28
29
' ... und den Ausgabepin wieder auf 0
30
cbi PinC, 1
31
32
' dem Servo seine Pause goennen
33
Waitms 5
34
35
' und ab zur naechsten Runde
36
Loop
37
End
Die Erwartung ist, dass der Ausgabepuls (gelb) genau dem Eingangspuls
(blau) folgt. Wird blau kürzer, wird auch gelb kürzer und umgekehrt.
Passiert das?
Ich habe schon so viel am Code rumgebastelt, dass der hald so geendet
ist...Die end ifs hatte ich alles auch mal anders...
Die Berechnung invertiert die gemessene Zeit und stellt diese umgekehrt
proportional zur gemessenen Zeit dar -> Taschenrechner hervornehmen und
mal mit ner Zahl versauchen. Das brauche ich später um das Querruder zu
steuern. Das eine Servo verhält sich gleich zum Steuerknüppel und das
Andere eben gertade umgekehrt proportional.
wie gesagt, der Code ist n bastel.
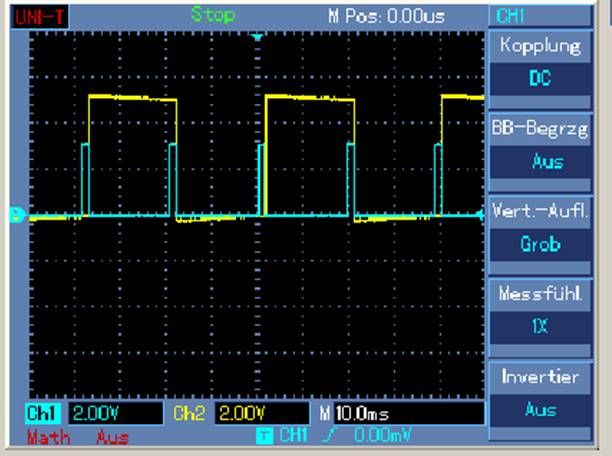
Aber funktionieren tut er Trotzdem noch nicht :( es ist genau das
gleiche Bild wie dso_2.gif.
Was kann denn da noch falsch sein? wieso geht das mit der Ausgabe nicht?
Eigentlich müsste das gelbe Signal nach der Zeit in A wieder abfallen.
Also das finde ich eigenartig. ich habe mal diesen Code laufen geladden:
$regfile = "m48def.dat"
$crystal = 10000000
$baud = 9600
'=============================== Servo einlesen
Config Pind.4 = Input
Config Pind.3 = Input
Servo1_h_in Alias Pind.4
Servo2_s_in Alias Pind.3
'=============================== Servo ausgeben
Config Pinc.1 = Output
Config Pinc.2 = Output
Servo1_out Alias Pinc.1
Servo2_out Alias Pinc.0
'===============================
Dim Servo1_h_in As Bit
Dim Servo2_s_in As Bit
Dim Servo1_out As Bit
Dim Servo2_out As Bit
Dim A As Integer
Dim B As Integer
Dim C As Integer
Dim D As Integer
Dim E As Integer
Dim U As Integer
Dim V As Integer
Dim W As Integer
Dim Z As Integer
Dim K As Integer
Dim Q As Integer
Dim X As Integer
Waitms 100
Do
Main:
B = 0
C = 0
D = 0
E = 0
' warte auf die steigende Flanke
while Servo1_h_in = 0
Wend
' die Flanke ist da, jetzt die Laenge des 1 Pulses ausmessen
A = 0
while Servo1_h_in = 1
Incr A
Waitus 1
Wend
'Servo2:
'Do
'If Servo2_s_in = 0 Then
'Goto Ausgabe_quer
'Else
'Incr B
'Waitus 1
'Loop
'End If
Ausgabe_quer:
C = A - 1500
D = C + 1
K = D * -1
E = K + 1500
' den Ausgabepuls erzeugen
' dazu den Ausgabepin auf 1 ...
Sbi PinC, 1
' ... und die Pulslänge absitzen ...
'While A > 0
'Decr A
Waitus 1000
'Wend
' ... und den Ausgabepin wieder auf 0
cbi PinC, 1
' und ab zur naechsten Runde
Loop
End
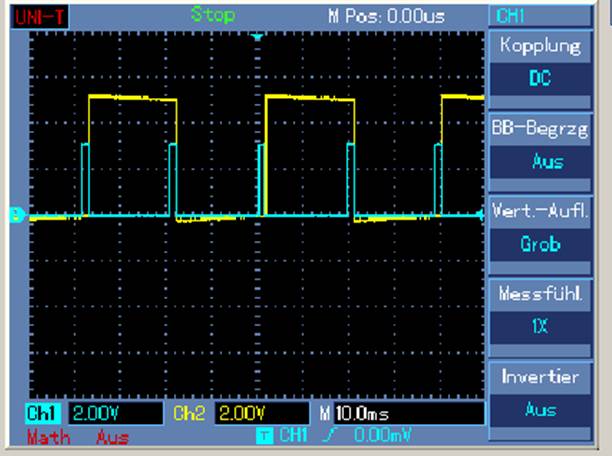
Also im Prinzip nur den Ausgang ne ms lang gesetzt. doch das Signal war
genau gleich, wie schon auf dem 2ten Bild.
auch wenn ich den Ausgang Setze und gleich wieder lösche (kein Wait
dazwischen) bekomme ich das gleiche Bild.
Was heisst denn das? Ich bin verwirrt.
Was auch komisch ist, verändere ich Die Pulslänge am Sender, so passt
sich die gelbe Linie an.
Andreas Kuster schrieb:> Was heisst denn das? Ich bin verwirrt.
Ist beim Brennen etwas schief gelaufen?
Brenn mal was drauf, was überhaupt nichts mit den Pusle zu tun hat :-)
Jeah, es geht, ich musste aus dem "Sbi PinC,1" ein "Sbi PortC, 1" machen
:) jetzt funzt es! Danke Für eure Hilfe, ich hoffe ich werde es noch
ganz hinbekommen! ;-)
Andreas Kuster schrieb:> Jeah, es geht, ich musste aus dem "Sbi PinC,1" ein "Sbi PortC, 1" machen> :)
Schäm.
Hab ich auch nicht gesehen sondern mitkopiert
Aber nachdem du sowieso ein paar schöne Alias hast, schlage ich vor, du
machst gleich Nägel mit Köpfen und schreibst
Servo1_out = 1
bzw
Servo1_out = 0
dann passiert dir sowas nicht noch einmal.
(Und einfacher zu warten und zu ändern ist es ausserdem :-)
Hehe, ja sowas kann ja mal vorkommen.
Ich hab die Variabeln auch so umbenannt zu Beginn, aber als es dann
nicht gefunzt hat, hab ich als erstes die Variabeln geändert, weil ich
so schonmal n Fehler ausschliessen konnte :)

{kind=link}