Hallo zusammen! Ich bin ein bisschen am verzweifeln. Folgendes: Ich hab einen Lichtsensor. Und eine Lampe die per PWM angesteuert wird. Soweit zu gut. Die soll einen gewissen Luxwert halten. Ich hab versucht mittels eine PID, PD, PI diese Regelung aufzubauen. Ich schaffe es einen fast stabile Reglung hinzubekommen. Allerdings nie mit der vollen Helligkeit. Angenommen ich hab einen Luxsollwert von 300 Lux. Halte jetzt den Lichtsensor zu, dann schaffe ich maximal 180 (0 - 254). Eigentlich sollte er 254 erreichen in dem Fall. Kp wurde so bestimmt, dass ich fast an einer schlechter werden Dämpfung bin. Dann habe ich versucht Ki einzustellen. Das geht allerdings nur bis zu einem gewissen Grad. Dann fängt das System dermaßen anzuschwingen, dass es nimmer lustig ist. Vielleicht kann mir ja jemand helfen... Wäre super! ;-)
Da wirst du dich schon etwas ausfühlicher über dein Programm verbeiten müssen - Hellseher sind hier leider ziemlich rar.
Hi, also ein komilitone von mir hat im labor so nen ähnlichen versuch gemacht wie du den gerade vorhast. ich erinnere mich jetzt nichtmehr an alle einzelheiten, aber ich weiss noch das er den messwert mit einem p-t1 glied dämpfenb musste, weil das messsignal sehr verrauscht war um das system einiger massen gut regeln zu können. hoffe das ich dir weiter geholfen habe. Gruß BlaBla
Max schrieb: > Angenommen ich hab einen Luxsollwert von 300 Lux. Halte jetzt den > Lichtsensor zu, dann schaffe ich maximal 180 (0 - 254). Eigentlich > sollte er 254 erreichen in dem Fall. Ich fürchte dein I-Anteil ist zu gering. Im fall einer Helligkeitsregelung würde ich 2-Stufig vorgehen. 1. Steuerung des PWM-Wertes anhand von Sollwert (und ggf. Betriebsspannung) Die Steuerung sollte auch ohne Regleranteil die PWM schon auf +/- 10% Genauigkeit stellen. 2. Regler für Feinabgleich (Umgebungshelligkeit, Alterung des Leuchtmittels usw.) Gruß Anja
@uhuu Ich hab versucht einen einfachen PID Regler zu realisieren. Leider bisher ohne erfolgt http://www.rn-wissen.de/index.php/Regelungstechnik @Bla Das mit der Dämpfung ist ein sehr guter Tip. Dann schau ich mir das nochmal an. Denn mit einem normalen PID Regler komm ich irgendwie nicht weiter. Regelungstechnik ist leider bei mir schon fast 2 Jahre ehr. Und damals hätte ich nicht gedacht, dass ich das nochmal so schnell brauche! ;-) Studenteneinbildung halt! :P @Anja Ja das habe ich mir auch gedacht. Deswegen hab ich ihn hochgesetzt. Und dann flackerte es bei direkter Rückkopplung (Sensor - Lichtquelle) noch stärker. Komisch ist nur, dass wenn ich den Lichsensor direkt auf die Lampe halte Blinkt es nicht mehr!??! Nur wenn er horizontal bzw. in weiterer Entfernung zur Lichtquelle ist.
schau dir doch einfach mal das signal vom lichtsensor mal mit einem oszilloskop an, ich habe die vermutung das es da rauscht wie nichts gutes, aber das hatte ich ja schon erwähnt. aber dann hättest du ja zumindest mal gewissen darüber :-)
Was ich mal gemacht habe ich, die abfallende Spannung am Lichtsensor gemessen. Na ja ist nicht gerade eine dünne Linie, aber extrem rauschen tut die jetzt nicht. Ich schau mal, dass ich heute abend mal ein Foto davon mache! ;-) Kann es auch am AD Wandler liegen?! Bzw. warum kann ich nur bis zu einer gewissen Lichthelligkeit kontrolliert regeln?!
Hallo Max, von "...bis xxx regeln" kann man ja wohl nicht sprechen. Da regelt nichts! Und wenn Du bei einer Vorgabe von 300 einen Wert von 256 erreichen willst, ist da auch noch nichts von PID zu sehen. Da hier keiner Deine Regler und Strecken-Eigenschaften kennt, stimmt der Tip schon: Oszilliskop anschliessen, altes Regelungstechnik Skript rausholen oder im Netz suchen, Sprungantwort ansehen...... Kann Dir keiner abnehmen. Gruss Michael (PS.: Vielleicht rennt irgendwo irgendwas an einen Anschlage.... Oszilloskop findet's)
ich vermute einen fehler im code. zeig den doch mal.
@Michael Roek-ramirez Wer ich machen! Ist es denn richtig, dass wenn ich den Lichtsensor zu halte die Regelung die maximal mögliche Stellgröße anlegen müsste - also 254 in meinem Fall?! @ Di Pi Ich habe mich praktisch daran orientiere. Werde aber heute abend mal den Code posten. :-) http://spurt.uni-rostock.de/lego.pdf
1 | uint16_t controlEVG (uint8_t *channel, uint16_t *sollLuxWert) |
2 | {
|
3 | static float esum = 0; |
4 | static float ealt = 0; |
5 | uint16_t istADCWert; |
6 | float sollADCWert; |
7 | float differenz; |
8 | int16_t controlResult; |
9 | float taInSek = (float) TA / 1000; |
10 | |
11 | //Auslesen des Istwerts
|
12 | istADCWert = readLightSensor(channel); |
13 | |
14 | //Umrechnung von LUX -> ADC-Wert
|
15 | //0 für 0 Volt und 1023 für VREF
|
16 | sollADCWert = ((float) MAXADCATMAXLUX / (float) MAXLUXATMAXADC) * (*sollLuxWert); |
17 | |
18 | /* PID Regler berechnung */
|
19 | differenz = sollADCWert - istADCWert; //Vergleich |
20 | esum = esum + differenz; //Integration I-Anteil |
21 | |
22 | //Begrenzung des I-Anteils um einen Windup Effekt zu verhindern.
|
23 | if (esum < -BEGRENZUGIANTEIL) |
24 | {
|
25 | esum = -BEGRENZUGIANTEIL; |
26 | }
|
27 | if (esum > BEGRENZUGIANTEIL) |
28 | {
|
29 | esum = BEGRENZUGIANTEIL; |
30 | }
|
31 | controlResult = KP * differenz + //PID - Reglergleichung |
32 | KI * taInSek * esum + |
33 | KD/TA * (differenz - ealt); |
34 | ealt = differenz; |
35 | |
36 | if (controlResult < MINSTELLGROESSE) //Begrenzung Stellgröße |
37 | {
|
38 | controlResult = MINSTELLGROESSE; |
39 | }
|
40 | if (controlResult > MAXSTELLGROESSE) |
41 | {
|
42 | controlResult = MAXSTELLGROESSE; |
43 | }
|
44 | |
45 | return controlResult; |
46 | }
|
So einmal der Code
> > Ist es denn richtig, dass wenn ich den Lichtsensor zu halte die Regelung > die maximal mögliche Stellgröße anlegen müsste - also 254 in meinem > Fall?! Richtig. Gruss Michael
In der Reglergleichung teilst du Kd durch TA und nicht wie Ki durch taInSek. Auf den ersten Blick sollte das zumindest das gleiche sein. Außerdem solltest du mal das Ergebnis deines float-cast überprüfen und ggf. über eine alternative (hochskalierunge, Festkomma) nachdenken.
kann es sein, dass du dich bei "BEGRENZUGIANTEIL" (für I-Anteil) verschrieben hast? Rechtschreibmäßig vermisse ich da nämlich ein "N". Sonst klappen alle deine vergleich nicht, aber wahrscheinlich würde da auch dein Compiler meckern... --> In dem fall: einfach ignorieren, was ich geschrieben habe ;)
Also viel hin und ehr. Viele Versuche. Aber alles schlägt fehl. Ich bin echt am verzweifeln. Das Ding schwingt periodisch. Aber will nicht aufhören. Zu mindest bei der Helligkeit, wie ich es betreiben möchte. Verstehe auch nicht, dass es bis zu 190 (0 - 254) nicht schwingt. kann mir jemand erklären, wie ich noch Einfluss auf meine "unbekannte" Regelstrecke mit einem Regler nehmen kann. Wie bedämpfe ich zum Beispiel den Lichtsensor. LG Max
Angehängte Dateien:
-

IMAG0085.jpg
730 KB
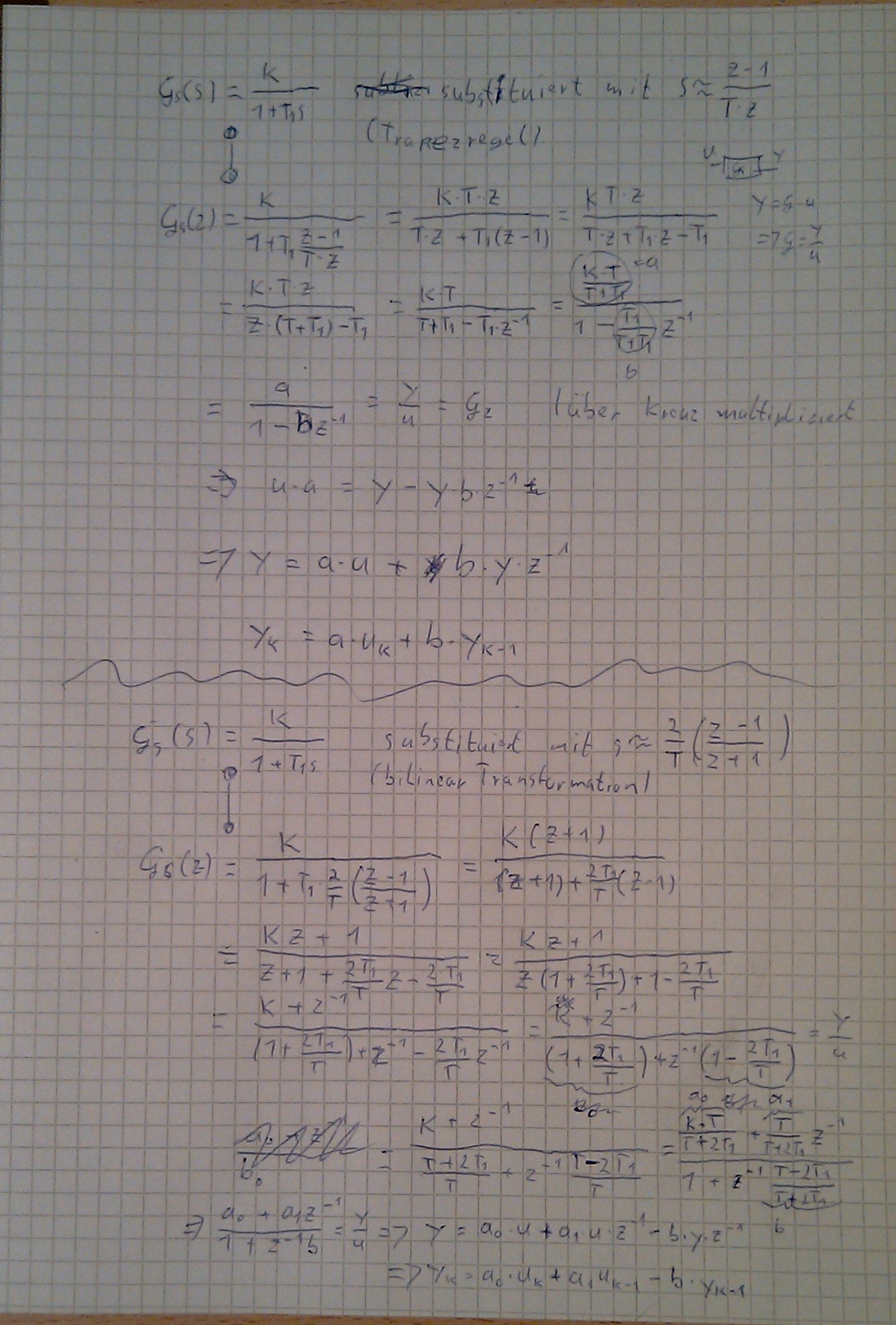
Zum glätten eignet sich immer ein P-T1-Glied, womit du das Sensorsignal glättest. für K kannst du 1 annehmen, da du ja keine verstärkung/dämpfung haben willst. Ich habs mal just for fun mal per hand eben mal ausgerechnet, hoffe du kannst meine schrift lesen. Die obere Differenzengleichung sollte eigentlich genügen. T ist die Abtastzeit und mit T1 müsstest du ein wenig rumspielen oder gegebenfalls mal durch simulieren. Gruß Blabla ich hoffe das ich mich nicht verrechnet habe g
Was du noch machen könntest wäre das du zum Beispiel die Übertragungsfunktion der Regelstrecke bestimmst. Dafür nimmst du die Sprungantwort des Systems auf und bestimmst ihre Parameter nach dem Verfahren wie im Link beschrieben. Mit der Übertragungsfunktion der Regelstrecke und dem P-T1 Glied des Sensors könntest du dann anschliessend Die Reglerparameter nach einem Verfahren deiner Wahl bestimmen. http://techni.tachemie.uni-leipzig.de/reg/rs_tn.html
BlabLa schrieb: > BEGRENZUGIANTEIL Vermutlich hatte ich doch recht mit dem zu kleinen I-Anteil (Ich meinte damit nicht die Regelzeitkonstante sondern den Betrag der auf den Ausgang wirkt). BEGRENZUGIANTEIL muß die Möglichkeit haben bis nach 254 zu laufen. Eine Willkürliche Begrenzung des I-Anteils als Anti-Windup ist normalerweise Unsinnig. Besser ist ein Einfrieren des I-Anteils wenn der Regler an die Begrenzung (0 oder 254 läuft). Damit das einfacher berechenbar ist wird auch nicht die Fehlersumme als I-Anteil gespeichert sondern die Summe aller "KI taInSek esum" Wenn Du das ganze analog aufbaust begrenzt Du ja auch nicht die Eingangsfehlersumme, sondern den Ausgang (an der Versorgungsspannung). Gruß Anja
Boar Leute ihr seit die Besten! ;-) Ich werde das mal ausprobieren. Hab jetzt 1 - 2 Tage Pause gemacht. Sonst hätte ich die Hardware aus dem Fenster geschmissen! ;-)
@BlaBla Du bist der Killer! ;-) War die richtige Lösung mit dem PT1 Glied. In Kombination mit dem PID Regler super Ergebnis. Anbei die Source. ggf. braucht das ja noch jemand! ;-)
1 | uint16_t readLightSensor(uint8_t *channel) |
2 | {
|
3 | static uint8_t i = 0; |
4 | static uint32_t result = 0; |
5 | |
6 | // Den ADC aktivieren und Teilungsfaktor auf 64 stellen
|
7 | ADCSRA = INITADC; |
8 | |
9 | // Kanal des Multiplexers waehlen
|
10 | // Interne Referenzspannung verwenden (also 2,56 V)
|
11 | ADMUX = REFVOLTAGE; |
12 | |
13 | // Den ADC initialisieren und einen sog. Dummyreadout machen
|
14 | ADCSRA |= (1<<ADSC); |
15 | while(ADCSRA & (1<<ADSC)); |
16 | |
17 | for(uint8_t i = 0; i < ADC_CIRCLES; i++) |
18 | {
|
19 | ADCSRA |= (1<<ADSC); |
20 | // Auf Ergebnis warten...
|
21 | while(ADCSRA & (1<<ADSC)); |
22 | |
23 | result += ADCW; |
24 | }
|
25 | |
26 | result /= ADC_CIRCLES; |
27 | |
28 | return (uint16_t) result; |
29 | }
|
30 | |
31 | uint16_t pt1GliedADC(uint8_t *channel) |
32 | {
|
33 | static float e = 0; // Ausgang |
34 | float temp; |
35 | float inputADC = readLightSensor(channel); |
36 | |
37 | temp = ADC_T_T1 * (ADC_K * inputADC - e); //Rekursionsgleichung |
38 | e = e + temp; |
39 | |
40 | return (uint16_t) e; |
41 | }
|
Ok ich will mal das Thema nochmal aufgreifen. Die Regelung funktioniert für einen festen Sollwert (sollLuxWert = 500). Soweit so gut. Wenn ich jetzt den sollLuxWert auf 50 Lux ändere, dann steuert er bei zu gehaltenden Lichtsensor nicht auf die geforderten 254. Dies liegt daran das esum in den Begrenzer läuft und Kp z.B. zu klein ist. Vergrößere ich die Grenzen, dann dann schwingt es bei großen Luxwerten extrem. HILFE! :)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.