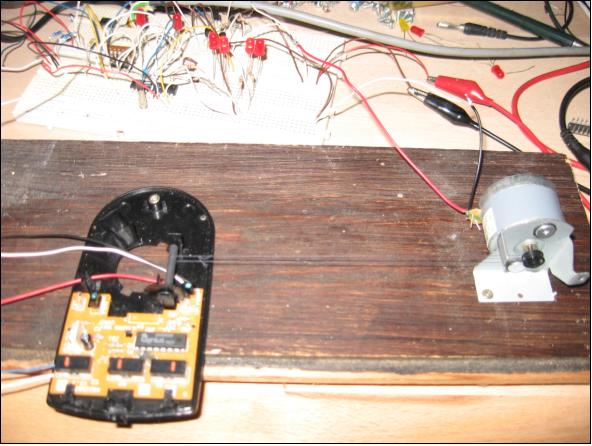
Hallo Ich habe einen 6v Kassetenrekorder Motor über eine H Brücke am Avr, dieser treibt einen "Incrementalgeber" aus einer alten pc maus der avr zählt die position und soll den Motor beim erreichen der Position anhalten... Klapt auch fast gut nur nach erreichen der position und abschalten des motors rollt dieser noch etwas weiter ... durch überschreiten der position wird die drehrichtung des motors umgekehrt und es endsteht lezendlich eine art ausschaukeln was gibt es also für eine lösung dieses zu verhindern ? bzw den motor zu bremsen ? liebe grüße
Angehängte Dateien:
-

12.JPG
51 KB
Da ich mich momentan auch mit Positionsreglung befasse, kenne ich mich da etwas aus. Nun, wie wird die Position den angefahren? Verwendest du einen Regler? Zur steuerung von Positionen werden normalerweise zwei ineinandergreifende Regelkreise verwendet. Z.b. ein PI-Regler der die Position regelt und seine Ausgangsgröße an einenen PID Regler weitergibt der die Geschwindigkeit regelt. Wenn du nicht mit Störgrößen rechnest, kannst du den D anteil auch weglassen. Du kannst aber auch mit dem Positonsregler die Leistung direkt anteuern. Bei kleineren Motoren sollte das gehen. Wenn du keinen Regler verwendest, bzw einen Zweipunktregler, wird das ganze nicht funktionieren. Wenn der Motor erst abgeschaltet wird, nachdem er die Position erreicht hat fährt er wegen dem Schwung immer etwas darüber hinaus. Desweiteren solltest du bedenken das du auch die Drehrichtung mit deinem Inkrementalgeber auswerten solltest. Denn wenn der AVR den Motor plötzlich von der einen in die andere Richtung umschaltet, fährt der Motor noch ein paar Schritte in die andere Richtung weiter. Wird das nicht berücksichtigt, bekommst du zählfehler, die sich mit der Zeit sogar aufaddieren. Um zu verstehen wie die H-Brücke funktioniert und wie man damit auch beremsen kann, empfehle ich dir den Wikipedia artikel: http://de.wikipedia.org/wiki/Vierquadrantensteller
Uwe.B schrieb: > was gibt es also für eine lösung dieses zu verhindern ? Da gibt es mehrere Ansätze die sich ggf. kombinieren lassen: - Vorhalt bei der Regelung. -> Du schaltest je nach Richtung aus der Du kommst (und ggf. Geschwindigkeit bei kurzen Fahrstrecken) entsprechend vorher ab. - Totbereich um die Zielposition. -> Je nach mechanischer Reibung des Motors einfach die Restabweichung ignorieren die zu einer Regelschwingung führen würde. - Bei Magnetventilen wird oft gezielt "ge-dithert" d.H. es wird kein konstanter Gleichstrom ausgegeben sondern ein quasi-zufälliger PWM der dafür sorgt daß das Ventil immer in Bewegung bleibt (keine Haftreibung) der Mittelwert des Stromes entspricht dann der Zielposition. Eventuell läßt sich dieses Verfahren auch auf Motoren übertragen. Gruß Anja
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.