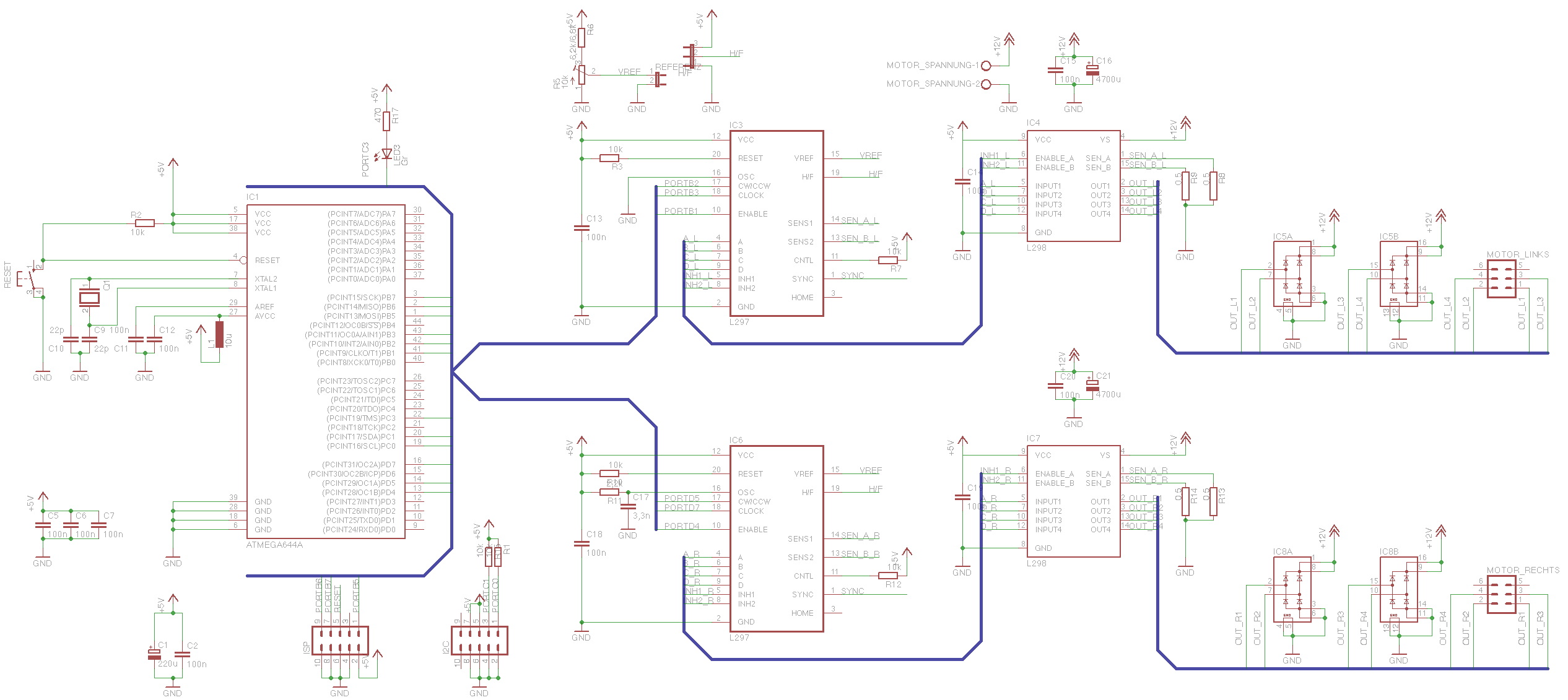
Hallo, ich bin gerade dabei das Layout für eine Schrittmotorsteuerung zu entwerfen. Könnte da mal bitte jemand einen Blick drauf werfen? Ich vermute das wird nicht ganz einfach die Schaltung ordentlich zu Entstören. Viele Grüße
Angehängte Dateien:
-

Schaltplan.png
41 KB
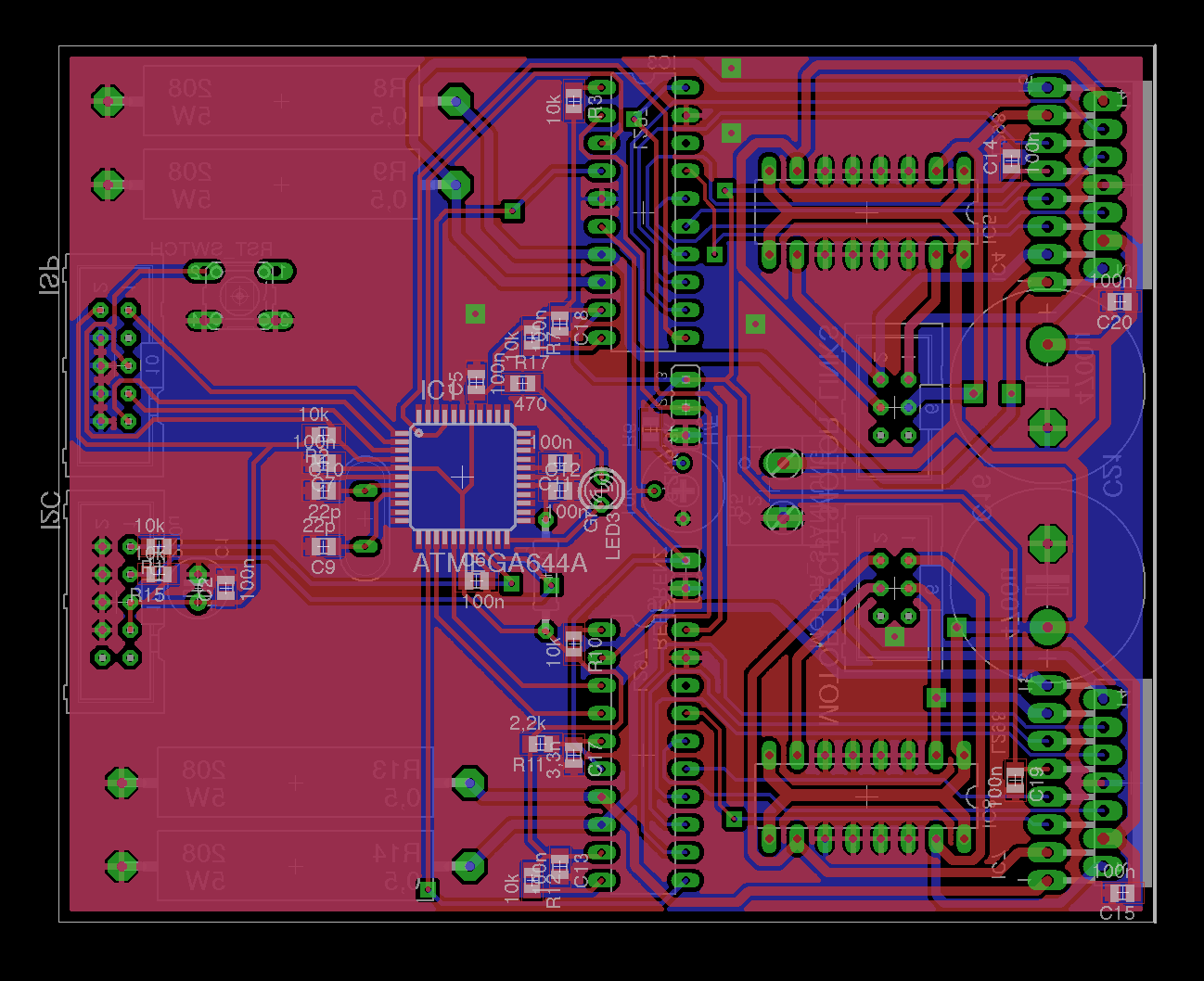
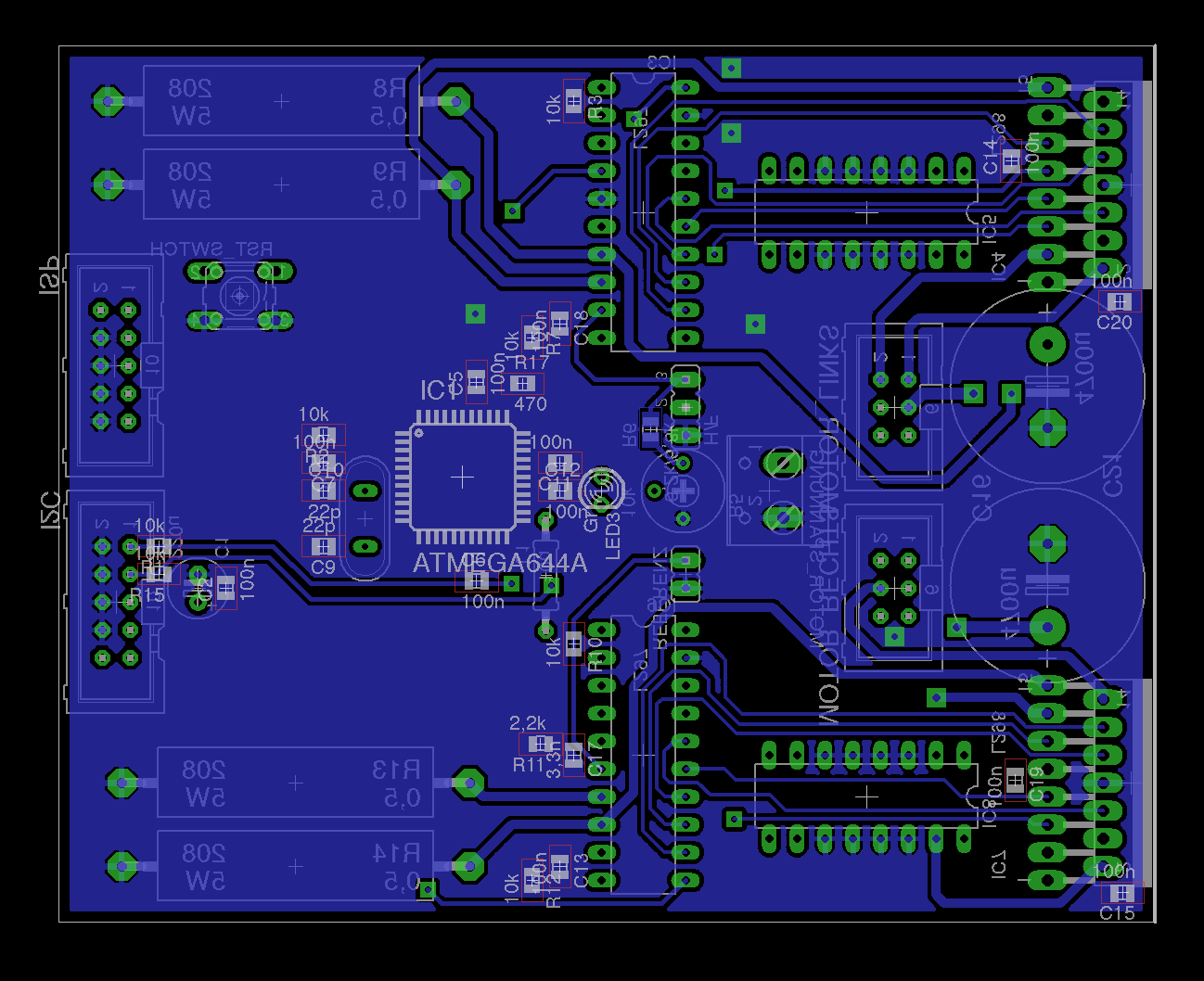
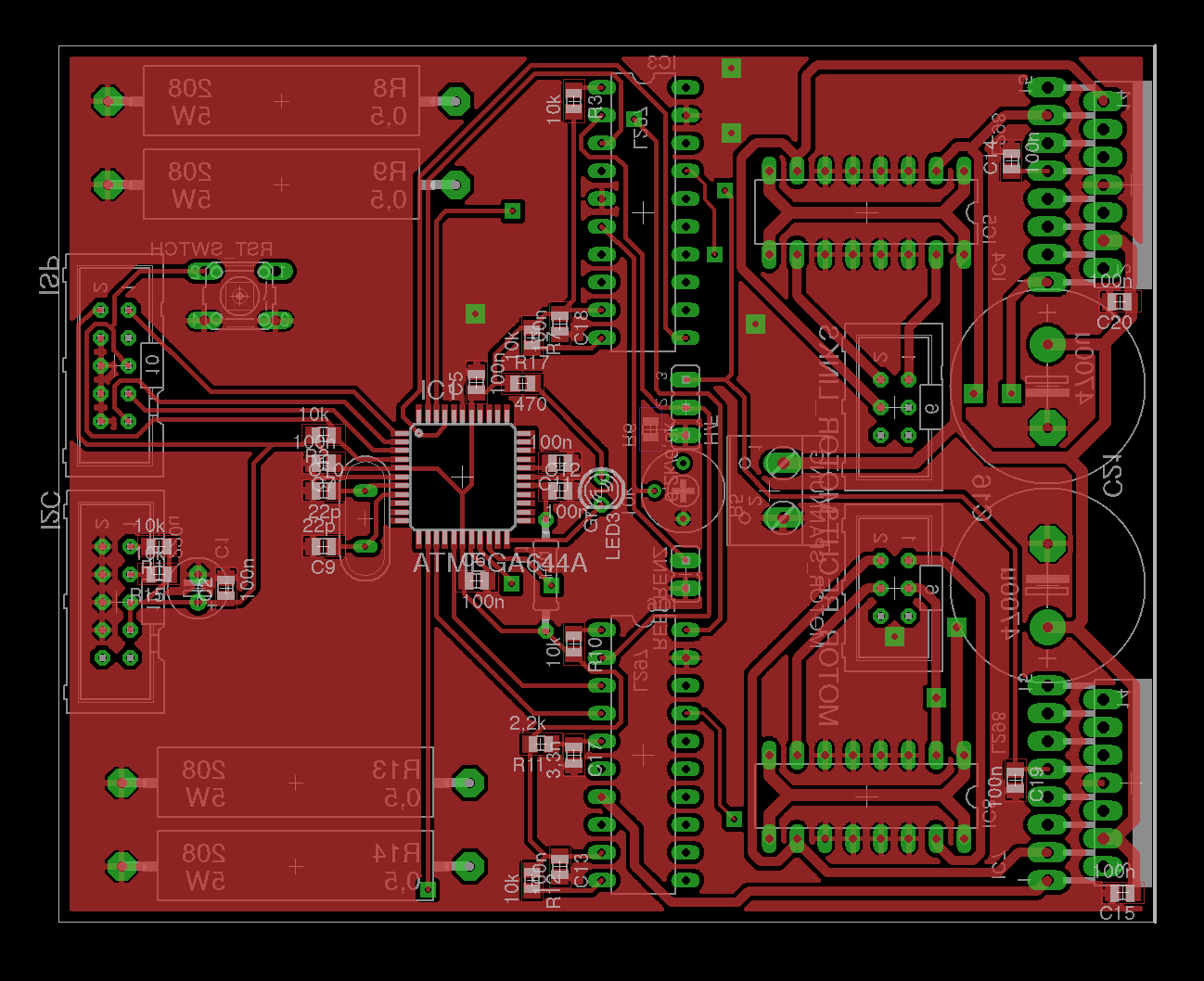
Schrittmotorsteuerung schrieb: > Ich vermute das wird nicht ganz einfach die Schaltung ordentlich > zu Entstören. Dazu muss sie ja erst einmal stören.... :-/ Und mit einem vernünftigen Layout wird das dann schon gehen... Allerdings ist dein Layout noch ein gut Stück weit von "gut" oder wenigstens "befriedigend" entfernt. Du fährst mit dem Laststrom fröhlich quer über den Mikrocontroller, das geht sogar soweit, dass sich dessen Oszillator (Quarzbeschaltung) den Strompfad mit dem Motorstrom teilen darf/muss... :-o Mehr dazu dort: http://www.lothar-miller.de/s9y/categories/33-Quarz Zeichne mal in deinen Schaltplan den Motorstrom (bzw. die Ströme) von 12V bis nach GND ein. Und dann such diese Strompfade in deinem Layout. Wenn sich da was mit dem uC-Bereich kreuzt, dann ist was faul. Derzeit passiert das mindestens mit den 0,5 Ohm Widerständen... Insgesamt fehlen zur Verbindung der beiden Masseflächen (oben und unten) noch mindestens 30 (eher mehr) gut platzierte Vias... ;-)
Eine kleine Frage: Wozu baust du die Sensewiderstände ein, wenn du laut Schaltplan keine Strommessung machst?
Also zu den Sense Widerstänen. Die sind doch wie im Datenblatt verschalten. Oder habe ich da etwas vergessen? Also das mit dem Quarz werde ich ändern. Aber wo führe ich den den Lastrom über den Mikrocontroller? Ein Paar Vias zwischen den Massenflächen wollte ich am Ende einfügen. Aber danke, dass du das noch einmal erwähnst. Also was kann ich denn jetzt konkret noch verbessern. Also ich schaue mal, ob ich Kreuzungen von den Motorströmen und dem Mikrocontroller vermeiden kann. Konkret kommt das ja vor allem bei den Sense Widerständen vor. Aber es ist leider schwer da Kreuzungen zu vermeiden, da die Sense Leitungen über die Komplette Platine gehen.
Wäre günstiger gewesen die Lastwiderstände nahe bei den Freilaufdioden (IC5,8) zu platzieren und den Rest weiter davon entfernt um die dicken Leiterbahnen kurz zu halten. Im Endeffekt was Lothar Miller meint, nur mit anderen Worten.
Schrittmotorsteuerung schrieb: > Also zu den Sense Widerstänen. Die sind doch wie im Datenblatt > verschalten. Oder habe ich da etwas vergessen? Ne ich hab die Schrift nicht gelesen :-( Dein Schaltplan passt. Was verwendest du da eigentlich für Dioden im IC-Gehäuse? :-)
Also mit dem Quarz das habe ich mal versucht. Allerdings hat das nicht so richtig funktioniert, da einfach viel zu wenig Platz ist. Hat da jemand ein Idee, wie man das in dem Fall machen könnte? Zu den Dioden da weiß ich nciht, was da genau für welche drin sind, allerdings ist dieser Baustein die Empfehlung aus dem Datenblatt. Die Lastwiderstände hätte ich auch gern. Näher an den Dioden platziert. Nur auch da fehlt leider der Platz. Denn in der Höhe ist da leider keiner mehr. Hat sonst noch jemand Verbesserungsvorschläge?
Schrittmotorsteuerung schrieb: > Die Lastwiderstände hätte ich auch gern. Näher an den Dioden platziert. > Nur auch da fehlt leider der Platz. Denn in der Höhe ist da leider > keiner mehr. Dann musst du halt PLatz schaffen. z.b. kannst du den L297 jeweils nach links schieben, den Dioden IC oben ein bisschen runter schieben und schon hast du PLatz für die Widerstände. Übrigends würd ich den Versorgungsstecker nicht unbedingt in die Mitte der Platine setzen. ;-)
Also wenn ich versuche die Widerstände noch unter die Dioden zu schieben, dann wird das nichts mit dem Routen, weil dann ist kaum noch Platz für die Dicken Leiterbahnen. Zum Versorgungsstecker. Ich weiß, dass das nicht optimal ist, aber einen besseren Platz habe ich noch nciht gefunden.
hier gibt es eine Schrittmotorsteuerung die sehr Ausgereift ist: http://www.robotikhardware.de/download/rnstepp297.pdf Schau dir da mal das Layout und die Bauteile an.
Also all zu viel sieht man da ja nicht. Also von der Leiterbahnenführung. Was müsste denn jetzt an meinem Layout unbedingt noch verändert werden, damit es wahrscheinlich funktioniert. Also wie seht ihr das jetzige Layout ist es da wahrscheinlich, dass die Schaltung nciht funktionieren wird?
Hallo, trifft deine Frage zwar nicht direkt, aber wieso LM297/LM298 und nicht z.B. diesen http://de.nanotec.com/schrittmotor_treiber_imt903.html oder etwas von TRINAMIC http://www.trinamic.com Wenn du dir schon die Arbeit mit dem Layout machst kannst du ja auch Controller/Treiber benutzen die ein bißchen mehr bieten als Voll- und Halbschritt. gruß Jan
Hallo, der IMT-903 sieht ja sehr interessant aus. Hat da jemand eine Passende Schaltung dazu?
Schrittmotorsteuerung schrieb: > der IMT-903 sieht ja sehr interessant aus. Hat da jemand eine Passende > Schaltung dazu? Der IMT-903 ist gar kein IMT-903, sondern ein Allegro A3979. Steht dort etwas versteckt in der Beschreibung. Datenblatt gibt es hier: http://www.allegromicro.com/en/Products/Part_Numbers/3979/index.asp Eine fertige Schaltung: http://hobbymechatronics.com/electronic-projects/11-projects/14-diy-microstepping-motor-driver Ansonsten scheint in Bastlerkreisen der A3977 verbreiteter zu sein: http://www.students.tut.fi/~kontkant/a3977.php.html http://www.thsengineering.com/projects/a3977proto/a3977proto.html Und damit es dir auch etwas leichter fällt, Google selbst zu bedienen, hier einige Stichworte, die man zur Suche verwenden kann: stepper controller board
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.