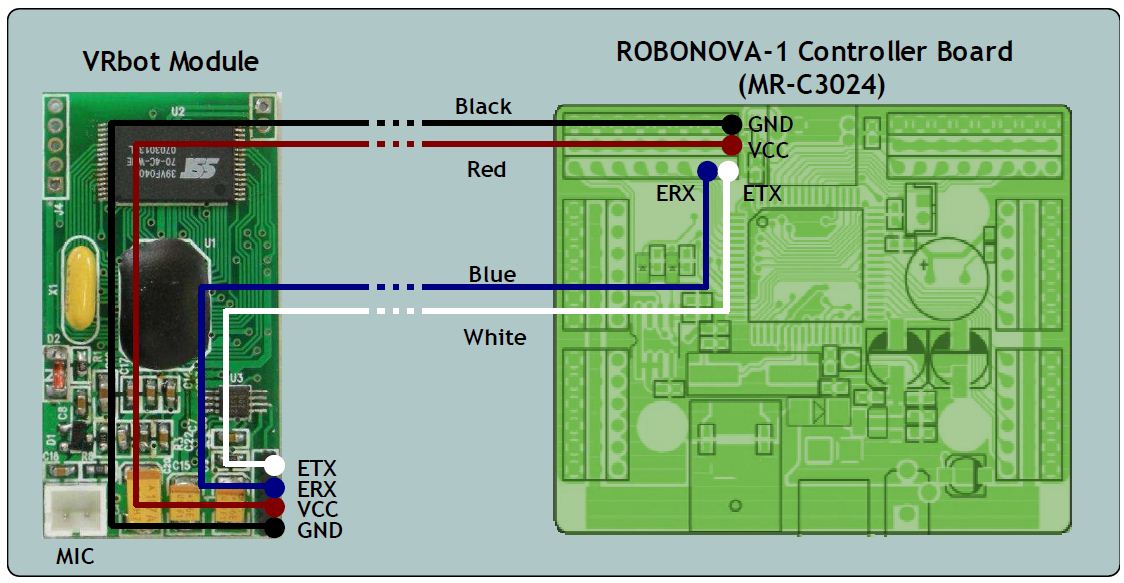
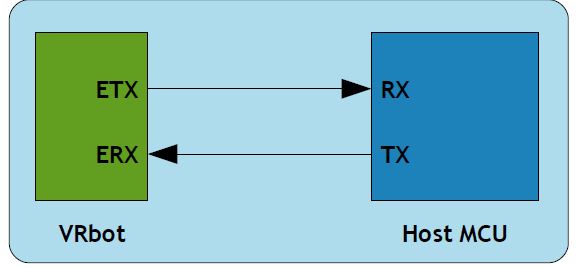
Da ich eine Spracherkennung in meinen Roboter einbauen will verbinde ich das Vrbot Modul mit meinem Atmega644 per UART. Im Datenblatt: http://download.tigal.com/veear/VRbot-ROBONOVA_QuickStart_1.2b_ENG.pdf steht RX gehört mit Rx auf dem Board verbunden. Im Communication Protokoll: http://robosavvy.com/RoboSavvyPages/VRbot/VRbotProtocol1.3.pdf steht Rx gehört mit Tx verbunden. Was stimmt jetzt von denen? lg andy
Angehängte Dateien:
Vielleicht habe ich mich wo verlesen was ich nicht gkaube, aber die Bilder sprechen für sich oder? lg andy
Andy S. schrieb: > Vielleicht habe ich mich wo verlesen was ich nicht gkaube, aber die > Bilder sprechen für sich oder? Die Bilder sprechen nur insofern für sich, als im linken Bild von einem ganz bestimmten Board mit einer ganz bestimmten Beschriftung der Stecker die Rede ist. Da steht aber nicht dabei, wie diese Beschriftung zustandekommt, bzw. aus wessen Sicht sie zu lesen ist. Das rechte Bild ist mehr ein allgemeines Schema. Und bei einer UART Verbindung sind die jeweiligen Anschlusspunkte normalerweise jeweils aus Sicht der jeweils vorliegenden Moduls zu sehen: Tx ... dort schickt das Modul Daten raus Rx ... dort will das jeweilige Modul die Daten reingestopft haben Also: Der Tx von dem einen Modul muss mit den Rx vom anderen Modul verbunden werden und umgekehrt.
Karl heinz Buchegger schrieb: > Also: Der Tx von dem einen Modul muss mit den Rx vom anderen Modul > verbunden werden und umgekehrt. So habe ich mir das eh gedacht, aber ok, ich geh einmal davon aus, is halt blöd wenn das das einzige Modul ist, das anders arbeitet, weil sonst müsste ich die Platine neu ätzen. Danke! lg andy
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.