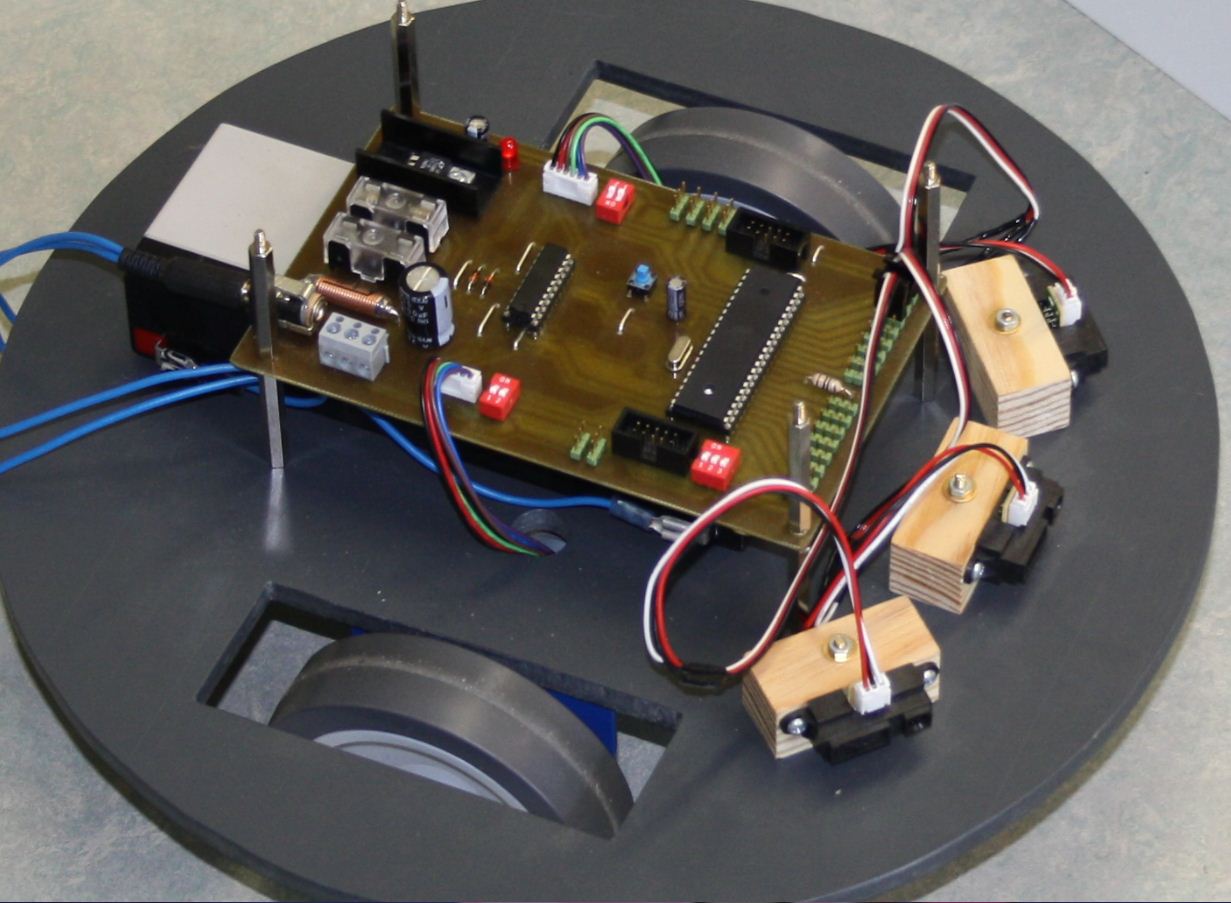

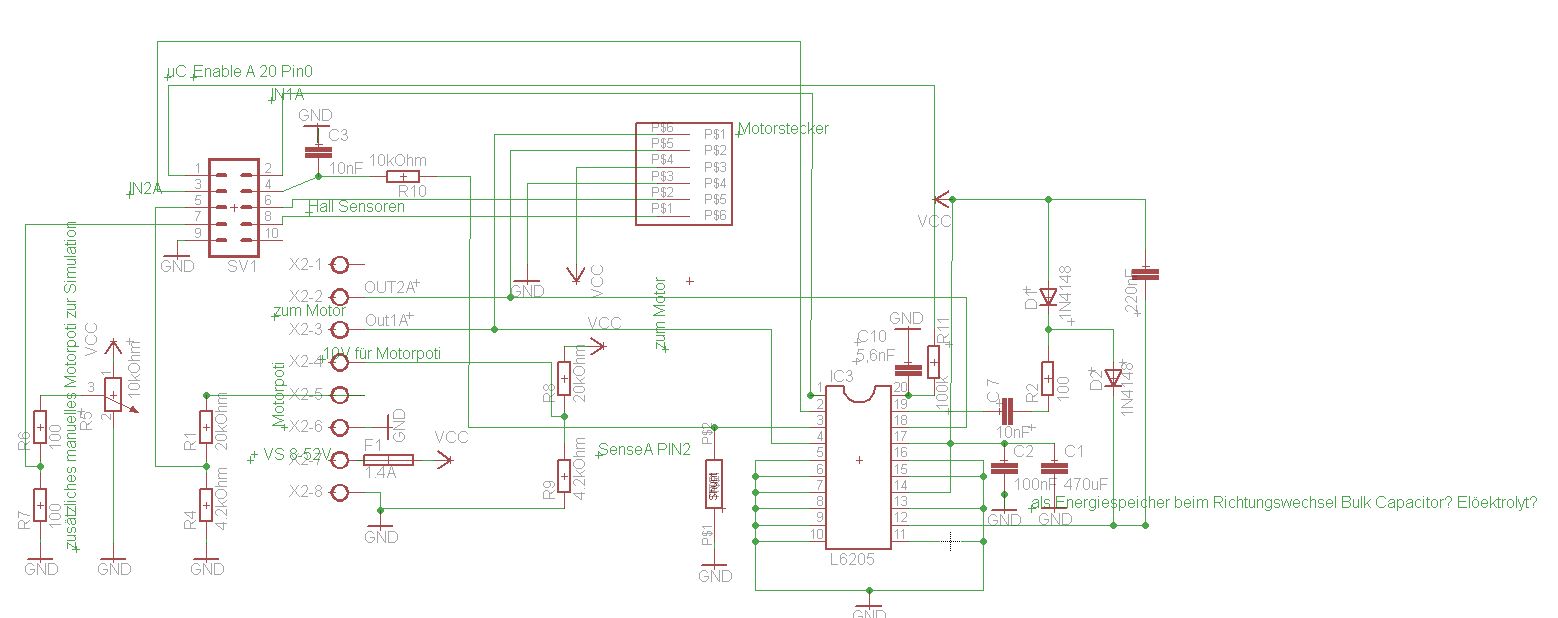
Hallo zusammen, ich möchte Euch allen herzlich danken, die mir bei meiner ersten Frage zum MotorIC so sehr geholfen haben. Vielen Dank, das bringt mich echt ein Stück weiter. Auf Eure Antworten aufbauend habe ich noch ein paar weitere Fragen. Vorher möchte ich aber gern Eure Lösungsvorschläge zusammenfassen, um zu zeigen, ob ich soweit alles richtig verstanden habe. Zu allererst aber zu meiner Person, die Fragen stehen unten durchnummeriert. Ich bin gelernter Mechatroniker, 31 Jahre alt und habe vor einem Jahr ein Elektrotechnikstudium mit dem Ziel staatlich geprüfter Elektrotechniker zu werden begonnen. In meinem Abschlußprojekt im 4. Jahr möchte ich etwas mit Mikrocontrollern bauen. Aus diesem Grund beschäftige ich mich jetzt schon im 2. Schuljahr damit, um genug Zeit zu haben. Eventuell brauche ich ja das Wissen einen Motor anzusteuern. Dieses Wissen kann generell nicht schaden, da man ja des Öfteren für irgendein Problem einen Motor ansteuern muss. Die erste Platine soll wirklich nur ein Versuchsmodell sein und ich war überhaupt schon sehr erfreut und überrascht, dass diese gleich auf Anhieb lief und ich Motoren ansteuern konnte. Wenn auch nur für ein paar Versuche. Anhand dieses Versuchsmusters möchte ich mein Wissen nun aufbauen und vertiefen und die Schaltung mit Eurer Hilfe sicherer machen. Evor ich überhaupt angefangen habe eine Schaltung dafür zu entwerfen habe ich im Forum vieles über den Motortrieber 6205 gelesen, um zu begreifen wie er funktioniert und mir das Datenblatt angeschaut, ohne so viel zu verstehen. Wenn die Platine in Ordnung ist oder auch parallel widme ich mich der Entwicklung des dazugehörigen C-Codes. Nachher im 4. Jahr während der Projektarbeit habe ich dann vielleicht weniger Stress, weil ich mich mit der Motoransteuerung und dem Platinenaufbau schon grundsätzlich auskenne und vieles jetzt schon ohne Stress mit Eurer super Hilfe klären konnte. Ich werde mir ein neues IC bestellen und dies wieder in meine alte Schaltung einbauen und mal mit dem Oszi messen wie weit sich die Versorgungsspannung beim Ausschalten des Motors erhöht. Bin mal gespannt! So kann ich auch lernen Schaltungen ohne tiefere Kenntnis auf die Qualität zu überprüfen indem ich schaue was auf der Spannungsversorgungsseite los ist. Ich habe den Schaltplan soweit korrigiert wie ich es verstanden habe. Anbei der Schaltplan: Hier die weiteren Fragen. Ich würde mich riesig freuen, wenn ihr mir genauso wie bei der ersten Frage helfen wollt! 1. Eine Aussage von Euch lautete: Es ist unmöglich bei diesem IC einen Kurzschluss in einer Halbbrücke zu erzeugen... Dank Dead Time und entsprechender Ansteuerung Ist das so richtig? 2. Bestimmt man die Deadtime über den Kondensator und den 100k Widerstand am Enableeingang oder ist die Deadtime etwas IC-internes? 3. Dicker Kondensator im Lastkreis direkt an die Versorgunsspannung am IC anschließen Dient dieser Kondensator dazu die gespeicherte Energie des Motors beim Ausschalten aufzufangen? Damit soll sich dann die Versorgungsspannung auch nicht unzulässig hoch erhöhen und das IC durch zu hohe Spannung kaputt gehen. Ist der Kondensator C1 im Schaltplan so ok? 4. Und die Ausgänge des B-Kanals mit GND kurzzuschliessen ist auch keine gute Idee. Warum denn bitte nicht? Ich dachte man soll meinsten keine Eingänge offen lassen, weil sich dort sonst was einstreuen kann und das IC schaltet. To increase noise immunity, unused logic pins (except ENA and ENB) are best connected to 5V (High Logic Level) or GND (Low Logic Level) (see pin description). 5. Wiedereinschalten des Ausgangs ausreichend verzögern. Das soll am Enable Eingang durch den Kondensator und den Serienwidderstand gehen. Braucht man das dann softwaretechnisch nicht mehr beachten und kann per software direkt den Knopf drücken Wechsel Linkslauf- Rechtslauf. Denn der Kondensator sorgt für eine „Dead Time“? Ist die ausreichend? Hängt wahrscheinlich von der Zeit ab, die der Motor braucht um zu stoppen. 6. Der Strom ist weniger das Problem, sondern eben die Überspannung, die dort auftritt. Es gibt im Prinzip drei Lösungen: - großer Kondensator (reicht bei sehr kleiner Energie) - dicke Z-Diode zur Spannungsbegrenzung - Bremschopper Wo müßte ich denn die dicke Z-Diode zur Spannungsbegrenzung anschließen? Ich habe keine Vorstellung. Wie würde ich einen Bremschopper anschließen? 7. Frage: Drosselspule zum Schutz vor dem Bürstenfeuer einbauen? Ich habe mal gehört aufgrund des erzeugten Bürstenfeuers eines DC_Motors ist eine Drosselspule so nah wie möglich am Motor anzubringen. Welche Induktivität sollte die denn für diesen auf dem Bild abgebildeteten 24V Getriebemotor mit 0.5A und 3Nm haben? Ich habe mal ein Vorschlag als Diskussionsgrundlage reingestellt. 8. It is recommended to keep Power Ground and Signal Ground separated on PCB. Wie soll das bitte auf meiner Platine gehen? Den Signal Ground verbinde ich mit einer Leitung mit dem Powerground, ok. Der Powerground liegt doch aber auf der ganzen Platine und verbindet sich der dadurch nicht ständig mit dem Signalground, also an mehreren Punkten? 9. Sollten an den Spannungsteilern nicht auch noch ein 100nF Kondensqator gehen Massen angeschlossen werden, um das Rauschen zu reduzieren. Gerade das vom dem Poti? Die beiden Potis (einmal das Motorpoti und einmal das manuelle, um die Software leichter prüfen zu können) produzieren doch ein Rauschen und diese werden direkt auf den Analgeingang des Mikrocontrollers geführt. Viele Grüße, Matthias aus Düsseldorf.
Angehängte Dateien:
-

roboter.JPG
130 KB -

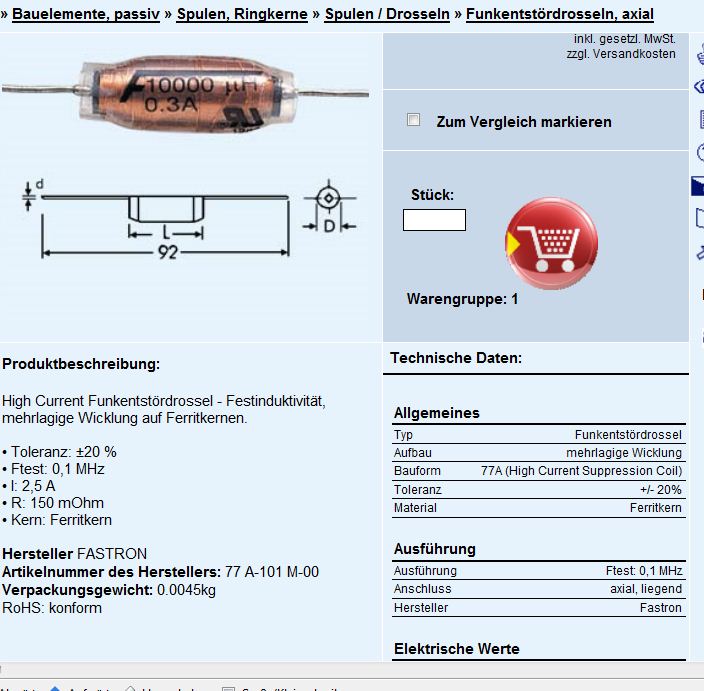
Spule.JPG
87 KB -

ertgert.JPG
100 KB -

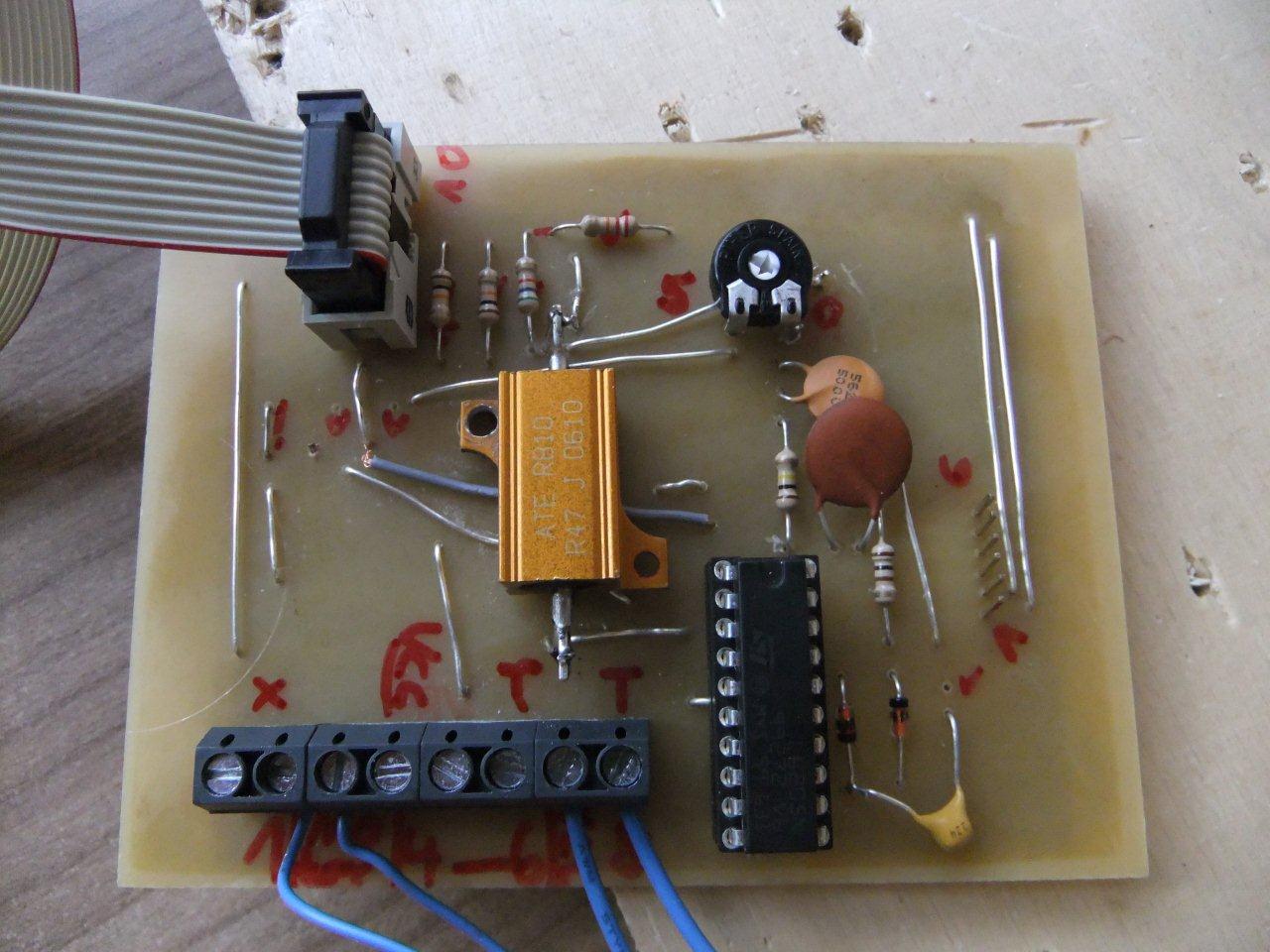
DSCF0396.JPG
790 KB -

DSCF0397.JPG
150 KB -

dfgdfgdf.JPG
100 KB
Matthias H. schrieb: > DSCF0396.JPG > > 4,2 MB, Du musst uns nicht vorhalten, was für eine Auflösung deine FUJIFILM FinePix F80EXR hat.
tut mir Leid mit demzu großen foto. Habeich auch gemerkt, dass das sehr lange dauert zu laden.
mach mal einen schöneren Schaltplan (man kann Bauteile auch spiegeln und drehen) und setze ihn hier als PNG Datei rein. Axel
Hi, meinst Du den Stromlaufplan? Habe ich den verwirrend gezeichnet? Mir gefällt er auch nicht so richtig. Was sollte ich den besser zeichnen können und wozu ein Bauteil spiegeln? Kannst Du mir das bitte an einem konkreten Bauteil vorschlagen warum wieso und wie, dann verstehe ich und mache es gern. Viele Grüße, Matthias.
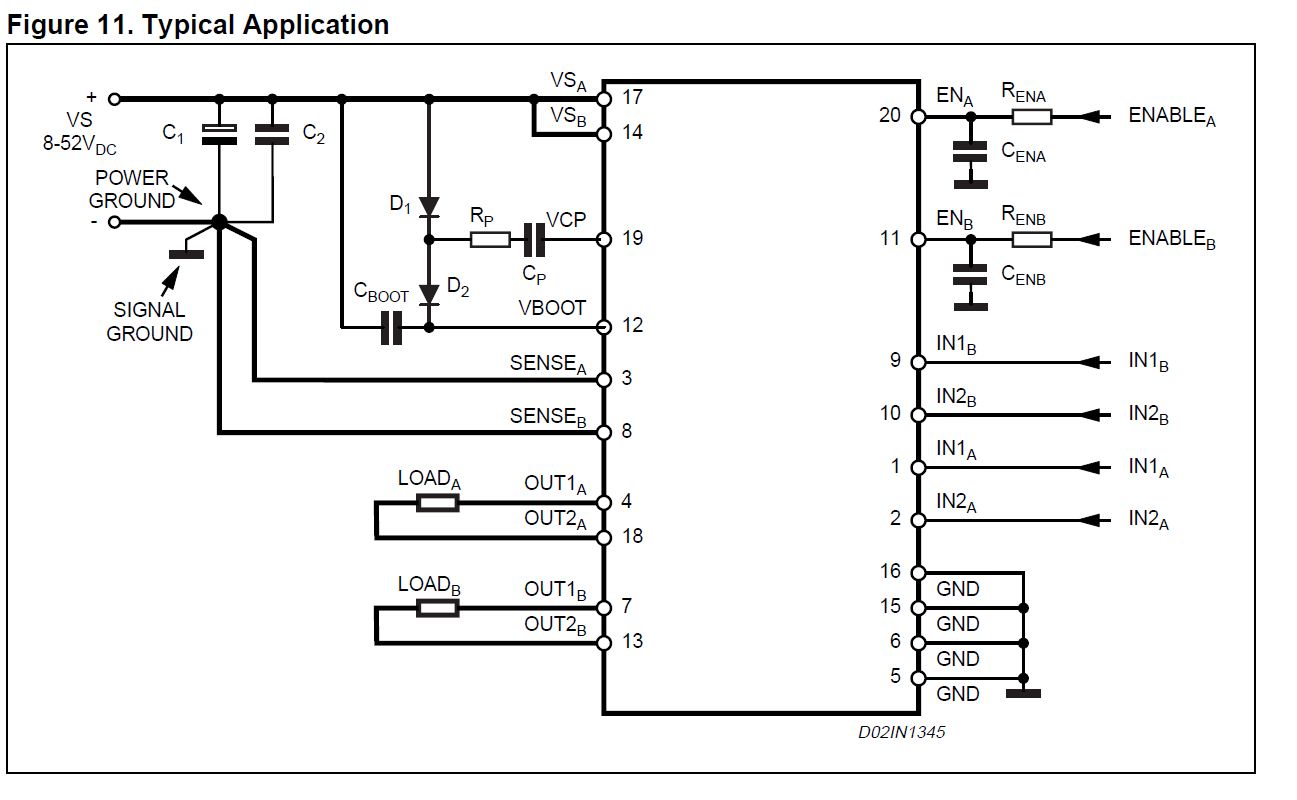
Matthias H. schrieb: > 1. Eine Aussage von Euch lautete: > Es ist unmöglich bei diesem IC einen Kurzschluss in einer Halbbrücke zu > erzeugen... Dank Dead Time und entsprechender Ansteuerung > Ist das so richtig? Das ist richtig. Du kannst mit den beiden Eingängen jeweils eine Halbbrücke steuern. Da ist es quasi per-Design so vorgesehen, dass man nicht innerhalb einer Halbbrücke beide FETs aktivieren kann. Zumindest im statischen Betrieb (Kein Pegelwechsel. also Frequenz geht gegen 0) Im dynamischen Betrieb (z.B.) PWM sorgt der Chip dir schon dafür, dass der obere FET erst angeschaltet wird, wenn der untere ausgeht. Das ganze gilt auch andersherum. > 2. Bestimmt man die Deadtime über den Kondensator und den 100k > Widerstand am Enableeingang oder ist die Deadtime etwas IC-internes? Der Kondensator am EN-Eingang bestimmt die Zeit, nach der der Chip abschaltet, wenn eine Overcurrent-Condition aufgetreten ist. Der Widerstand dient nur als Pullup. > 3. Dicker Kondensator im Lastkreis direkt an die Versorgunsspannung am > IC anschließen Gut! Je nach Motorstrom kannst du hier auch 1000µF nehmen, würde ich sagen. Wenn es der Platz jedenfalls hergibt. > Dient dieser Kondensator dazu die gespeicherte Energie des Motors beim > Ausschalten aufzufangen? Damit soll sich dann die Versorgungsspannung > auch nicht unzulässig hoch erhöhen und das IC durch zu hohe Spannung > kaputt gehen. > Ist der Kondensator C1 im Schaltplan so ok? Schon. Achte aber darauf, dass du bei der Spannung gut überdimensionierst. Nimm dafür einen Elko. > 4. Und die Ausgänge des B-Kanals mit GND kurzzuschliessen ist auch > keine gute Idee. > Warum denn bitte nicht? Ich dachte man soll meinsten keine Eingänge > offen lassen, weil sich dort sonst was einstreuen kann und das IC > schaltet. Hä? ;-) ;-) Eingänge soll man nicht offen lassen. Ausgänge darf man nicht kurzschließen. So einfach ist das. > To increase noise immunity, unused logic pins (except ENA and ENB) are > best connected to 5V (High Logic Level) or GND (Low Logic Level) (see > pin description). OUTxyz ist kein Logic Pin. > 5. Wiedereinschalten des Ausgangs ausreichend verzögern. > Das soll am Enable Eingang durch den Kondensator und den > Serienwidderstand gehen. Braucht man das dann softwaretechnisch nicht > mehr beachten und kann per software direkt den Knopf drücken Wechsel > Linkslauf- Rechtslauf. Denn der Kondensator sorgt für eine „Dead Time“? > Ist die ausreichend? Hängt wahrscheinlich von der Zeit ab, die der Motor > braucht um zu stoppen. Da hast du mehrere Sachen falsch verstanden. 1. Warum soll man das Wiedereinschalten des Ausgangs verzögern? 2. Ist dafür das R-C Glied am EN Eingang nicht zuständig, wie man dem Datenblatt entnehmen kann. 3. Ist die DeadTime nicht dafür da, damit es keine Probleme (zumindest keine, die du bereits hattest) beim Umpolen des Motors gibt, sondern damit bei synchroner PWM Ansteuerung (LOW -> Unterer Halbbrücken-FET an, HIGH -> Oberer Halbbrücken-FET an) kein Shoot-Through passiert. Also damit der eine FET erst eingeschaltet wird, wenn der andere auch wirklich ausgeschaltet ist (innerhalb einer Halbbrücke). Wenn du den Motor sofort von der Drehrichtung umpolen willst, geht es nicht anders. Allerdings musst du dann dafür sorgen, dass du die Energie des Motors entsprechend "entsorgst". Wenn du das vorhast (ohne Abbremsrampe), solltest du den C1 noch etwas vergrößern (abhängig von der Leistung des Motors und dem Trägheitsmoment des Rotors). Eventuell könntest du auch eine Suppressor-Diode (eine "dicke" Z-Diode) an die Versorgungsspannung schalten, die früher als 50V (da geht der L6205 wieder kaputt) anspricht und so die restliche Energie verheizt. > 6. Der Strom ist weniger das Problem, sondern eben die Überspannung, > die dort auftritt. > Es gibt im Prinzip drei Lösungen: > - großer Kondensator (reicht bei sehr kleiner Energie) > - dicke Z-Diode zur Spannungsbegrenzung > - Bremschopper > > Wo müßte ich denn die dicke Z-Diode zur Spannungsbegrenzung anschließen? > Ich habe keine Vorstellung. > Wie würde ich einen Bremschopper anschließen? Direkt parallel zum C1. in Sperrrichtung. Die wird dann leitend, wenn die Induktionsspannung groß genug geworden ist. Zum Schutz würde ich sowas mal vorsehen. Bremschopper ist hier nicht nötig und auch etwas komplizierter, da der noch einer Ansteuerung bedarf (AFAIK). > 7. Frage: Drosselspule zum Schutz vor dem Bürstenfeuer einbauen? > Ich habe mal gehört aufgrund des erzeugten Bürstenfeuers eines DC_Motors > ist eine Drosselspule so nah wie möglich am Motor anzubringen. Welche > Induktivität sollte die denn für diesen auf dem Bild abgebildeteten 24V > Getriebemotor mit 0.5A und 3Nm haben? Ich habe mal ein Vorschlag als > Diskussionsgrundlage reingestellt. Hm. Achwas, meinst du das ist notwendig? Eventuell eine Luftspule mit ein paar Windungen dicken Kupferlackdraht. Genaueres kann ich dir hierzu aber nicht sagen! > 8. It is recommended to keep Power Ground and Signal Ground separated > on PCB. > Wie soll das bitte auf meiner Platine gehen? Den Signal Ground verbinde > ich mit einer Leitung mit dem Powerground, ok. Der Powerground liegt > doch aber auf der ganzen Platine und verbindet sich der dadurch nicht > ständig mit dem Signalground, also an mehreren Punkten? Letzteres soll eben nicht passieren. Du sollst Signalground und Powerground als zwei völlig getrennte Signale behandeln, die du quasi einzeln herausführst auf Klemmen und dann am Netzteil (bzw. an der Batterie) erst zusammenführst. Hintergrund ist, dass auf dem Power-Ground ein hoher (impulsartiger) Strom fließt, der dort einen Spannungsabfall verursacht. Das ist nicht weiter schlimm für die Last. Wenn du allerdings entlang dieser Leitung, wo die Spannung abfällt noch an mehreren Stellen das Potenzial abgreifst, wirst du dort keine Masse mehr haben, sondern ein von Masse verschiedenes Signal. Und dadurch handelst du dir Störungen in den Niedrig-Strom-Pfad ein. > 9. Sollten an den Spannungsteilern nicht auch noch ein 100nF > Kondensqator gehen Massen angeschlossen werden, um das Rauschen zu > reduzieren. Gerade das vom dem Poti? Die beiden Potis (einmal das > Motorpoti und einmal das manuelle, um die Software leichter prüfen zu > können) produzieren doch ein Rauschen und diese werden direkt auf den > Analgeingang des Mikrocontrollers geführt. Hm, wo geht das denn hin? Prinzipiell ist Tiefpassfilterung IMMER gut. Allerdings hat sie den Nachteil, dass sie eben die Bandbreite des Nutzsignals begrenzt. Wenn das Poti nur von einem Menschen eingestellt wird, würde ich es auf jeden Fall Tiefpass-filtern. Zum Beispiel mit 1k-10k und 100nF oder sowas.
Zitat: Letzteres soll eben nicht passieren. Du sollst Signalground und Powerground als zwei völlig getrennte Signale behandeln, die du quasi einzeln herausführst auf Klemmen und dann am Netzteil (bzw. an der Batterie) erst zusammenführst. Hintergrund ist, dass auf dem Power-Ground ein hoher (impulsartiger) Strom fließt, der dort einen Spannungsabfall verursacht. Das ist nicht weiter schlimm für die Last. Wenn du allerdings entlang dieser Leitung, wo die Spannung abfällt noch an mehreren Stellen das Potenzial abgreifst, wirst du dort keine Masse mehr haben, sondern ein von Masse verschiedenes Signal. Und dadurch handelst du dir Störungen in den Niedrig-Strom-Pfad ein. Zitat ende Jetzt widersprichst Du Dir ja selbst. Der einzige Punkt, wo man Power-Gnd und Signal-Gnd zusammenlegt, ist der Punkt, den beide Spannungen betreffen, nämlich direkt am L6205. Und sonst nirgens. Der Sense-Widerstand muss ein Typ mit niedriger Induktivität sein. Die Abblock-Cs müssen so dicht wie möglich am L6205 sein. Die Gnd-Pins 5,6,15,16 dienen auch dazu, die Wärme abzuführen. Dort breite Kupferbahnen anbringen. Die B-Ausgänge müssen offen bleiben (wie schon geschrieben). Im Datenblatt oder in der zugörigen Application Note sind doch sicherlich ein Referendesign und Design-Rules angegeben.
Hallo Simon, vielen Dank für Deine ausführlichen Antworten. Daran werde ich morgen erstmal wieder was zu knabbern haben. Langsam vestehe ich aber immer mehr und es macht richtig Spaß. Die Ansteuerlogig für diesen Potimotor, der dicke, der auf dem Bild zu sehen ist, ist auch gerade ebend fertig geworden. :-) So läuft der Motor nach Tastendruck in eine Richtung so lange bis das interne 10k Poti die Endposition meldet. Muss mir jetzt nur noch ein neues IC bestellen und das Design der Schaltung mittels Eagle neu entwerfen. Mein Eaglelayout dieser Platine ist so schlecht und damit habe ich noch Schwierigkeiten. Würde sich hier im Forum jemannd finden, der meinen fetigen Schaltplan neu routen würde, damit ich mal sehe wie es richtig ist. Ich weiß, dass das viel Arbeit ist und bin daher sehr gern bereit 15-20€ zu bezahlen. Das ist es mir Wert zu sehen, wie ein ordentliches Layout im Vergleich zu meinem hinzukriegen ist. Den Schaltplan habe ich ja soweit schon fertig!! Es müßte nur neue geroutet werden und die Bauteile eventuell besser auf der Platine anordnen. Viele Grüße und vielen vielen Dank, Matthias.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.