Hallo, Angenommen ich hätte einen BLDC mit 6 Polpaaren und 3 Hallsensoren in 120° Anordnung für Sinuskommutierung und ich hätte gerne für Drehrichtung und Index ein I und Q Signal von zwei Sensoren, müsste ich doch einfach einen 4. Hallsensor im Winkel von 15° zu einem der drei vorhandenen Sensoren oder einem Vielfachen davon anbringen, oder? Was mir noch nicht ganz klar ist: -Alle drei Hallsensoren für die Kommutierung würden bei 6 Polpaaren ja das gleiche Signal liefern. Ist da eine Kommutierung überhaupt möglich? -Gibt es eine Formel die die Anzahl der Polpaare mit der Anzahl und Ausrichtung der Hallsensoren in Beziehung setzt? -Ich würde sagen eine Formel für den Winkel zwischen Kommutierungs-Hallsensor und Indexsensor ist 90°/Anzahl Polpaare, korrekt? -Welche Literatur kann man mir bei meinem Wissensstand empfehlen? -Wann nimmt man analoge Hallsensoren und wann digitale und warum? -Fallen Hallsensoren aus oder ist das ein unverwüstliches Bauteil? -Welcher Hersteller entwickelt gute Hallsensoren? -Ist es üblich die beiden IQ Signale von z.B. analogen Hallsensoren über einen Quadratur-Encoder in Rechtecksignale zu wandeln? Gruß Ojemine
Ojemine schrieb: > Welche Literatur kann man mir bei meinem Wissensstand empfehlen? Elektrische Maschinen, Rolf Fischer Elektrische Antriebe - Grundlagen, Dirk Schröder
Es gibt fertige Bausteine die aus den drei Phasen der Hallsensoren Richtung und Drehfrequenz ableiten. Ein 4.Sensor hilft meiner Meinung nach nicht. Es gibt eine feste Beziehung zwischen Polpaaranzahl und Winkel der Hallsensoren. Bei 6 Polpaaren kann der Winkel zwischen den Sensoren kleiner sein oder ein vielfaches davon. Deshalb paßt 120° immer. Analoge sind preiswerter und eigentlich die ältere Bauform. Dafür sind jedoch differenzverstärker notwendig die nicht jeder Motorcontrol Baustein integriert hat. Digitale haben diesen Verstärker integriert. Man kann jedoch im Prinzip analoge Sensoren an Kontroller die eigentlich für digitale gebaut sind anschließen und umgekehrt. Ausfallen kann immer was. Allegro baut sowas und Asahi beispielsweise. Aber es gibt auch eine ganz Menge anderer.
Analoge Hallsensoren werden benutzt, wenn die Stärke des mangetischen Feldes bestimmt werde soll. Digitale, wenn "nur" interressant ist, ob ein Feld anleigt, oder nicht, wobei das Magnetfeld nur als Mittel zum Zweck verwendet wird, nämlich irgend eine Position berührungslos zu erfassen.Das kommt Deinem Anwendungsfall nahe. Der Preisunterschied sollte da differenziert betrachtet werden, bei Digital ist meist keine weitere Beschaltung notwendig, bei Analog schon. Außerdem sind digitale Hallelemente in jedem PC-Lüfter enthalten und auch wenn die Lüfter sterben, liegt das nicht primär an den Hallelementen sondern eher an den miesen Lagern --> Quelle für Hallelemente. Aus meinen beruflichen Erfahrungen kann ich sagen, daß Ausfälle sehr selten sind und wenn es doch vorkahm, dann galt immer die Regel: Jeder elektrische Fehler ist in erster Ableitung ein mechanischer Fehler. Sprich, die Teile waren mechanisch zerstört.Daher, bei ordentlichem Betrieb, unverwüstlich.
Ojemine schrieb: > Angenommen ich hätte einen BLDC mit 6 Polpaaren und 3 Hallsensoren in > 120° Anordnung für Sinuskommutierung und ich hätte gerne für > Drehrichtung und Index ein I und Q Signal von zwei Sensoren, müsste ich > doch einfach einen 4. Hallsensor im Winkel von 15° zu einem der drei > vorhandenen Sensoren oder einem Vielfachen davon anbringen, oder? Die Drehrichtung bekommst du aus der Phasenfolge, dazu braucht es keinen zusätzlichen Sensor. Den Indeximpuls müsstest du mit einem zusätzlichen Magneten und Hallsensor erzeugen, da dieser ja nur pro voller mechanischer Umdrehung erzeugt wird. Ein 4. Sensor ohne zusätzlichen Mag. würde keine zusätzliche Information liefern. > -Alle drei Hallsensoren für die Kommutierung würden bei 6 Polpaaren ja > das gleiche Signal liefern. ?? Was meinst du damit ?? Wenn du ohne Referenzpunkt jeden der Sensoren (bei drehendem Motor) mit dem Skope misst, dann wirst du bei allen ein Rechtecksignal messen, ja. > Ist da eine Kommutierung überhaupt möglich? Natürlich. Die Halls liefern 'nur' Information darüber, das eine elektrische Sektorgrenze zu Ende ist und Kommutiert werden muss. > -Gibt es eine Formel die die Anzahl der Polpaare mit der Anzahl und > Ausrichtung der Hallsensoren in Beziehung setzt? Es gibt immer nur 3 Hallsensoren, die um 120° versetzt angeordnet sind. Die Geberscheibe hat dann die Magnetpole entsprechend der Polpaarzahl der Maschine. > -Ich würde sagen eine Formel für den Winkel zwischen > Kommutierungs-Hallsensor und Indexsensor ist 90°/Anzahl Polpaare, > korrekt? Woher kommen die 90° und wozu dient der Indexsensor? > -Welche Literatur kann man mir bei meinem Wissensstand empfehlen? s.o. > -Wann nimmt man analoge Hallsensoren und wann digitale und warum? Mit analogen Sensoren kann man div. schweinereien machen und 'in die Zukunft sehen' wann der nächste Pol zu erwarten ist (da das Analogsignal im Pegel stetig ansteigt/abfällt). Macht aber nur die Messtechnik empfindlich und lässt sich mit mehr Intelligenz in SW erschlagen. > -Fallen Hallsensoren aus oder ist das ein unverwüstliches Bauteil? Fallen IGBTs aus, oder ist das ein unverwüstliches Bauteil? Gruß, Christian
Angehängte Dateien:
-

IMG2.jpg
270 KB
Vielen Dank für Eure hilfreichen Antworten. @C.H. die angehängte Skizze zeigt meine Vorstellung von der ganzen Sache. 12 Pole, abwechselnd Nord/Süd gepolt (rot/grün). Habe ich jetzt 3 Hallsensoren, 120° zueinander verschoben (3 rote Pfeile im Bild) und ich drehe den Motor, liefern alle 3 Sensoren ein identisches Signal. Ich brauche ja nicht zwingend einen Index-Impuls pro Umdrehung und somit nicht zwingend einen Zusatzmagneten, oder?. Ich könnte ja auch umrechnen: 6 positive Impulse = 1 Umdrehung und hätte somit eine deutlich höhere Auflösung. Mit I und Q hätte ich eine Genauigkeit auf 360°/24, oder? Der Indexsensor wäre in meinem Bild ein 4. Sensor an einer der blau eingezeichneten Pfeile (es sind nicht alle denkbaren Positionen eingezeichnet). Delta_Phi ist in meinem Bild 15° Also 180°/Polzahl oder 90°/Polpaar-Anzahl
Ich würde mich freuen, wenn mir jemand meinen letzten Beitrag korrigieren oder bestätigen könnte. :-)
Bei einem 1PolPaar Motor sind die sensoren um 120° versetzt. Bei 2PolPaaren sind es 60°, bei vier sind es 30°. Du siehst die Regelmäßigkeit?! Bei 6polpaaren wie bei Dir sind es 20°. Also 0°, 20° und 40°
Ich denke, ein 4.sensor liefert Dir keine wirkliche zusatzinformation, sondern nur ein phasenversetztes hall signal
Zusätzlich gibt es einen Zusammenhang zwischen Anzahl der Polpaare und Anzahl der Statoren(Spulen). In Deinem Fall sind es 9. Üblicherweise werden die Hallsensoren genau zwischen die Statoren plaziert. Wenn Du es soweit verstanden hast, müßte jetzt eine Frage von Dir kommen.
Angehängte Dateien:
-

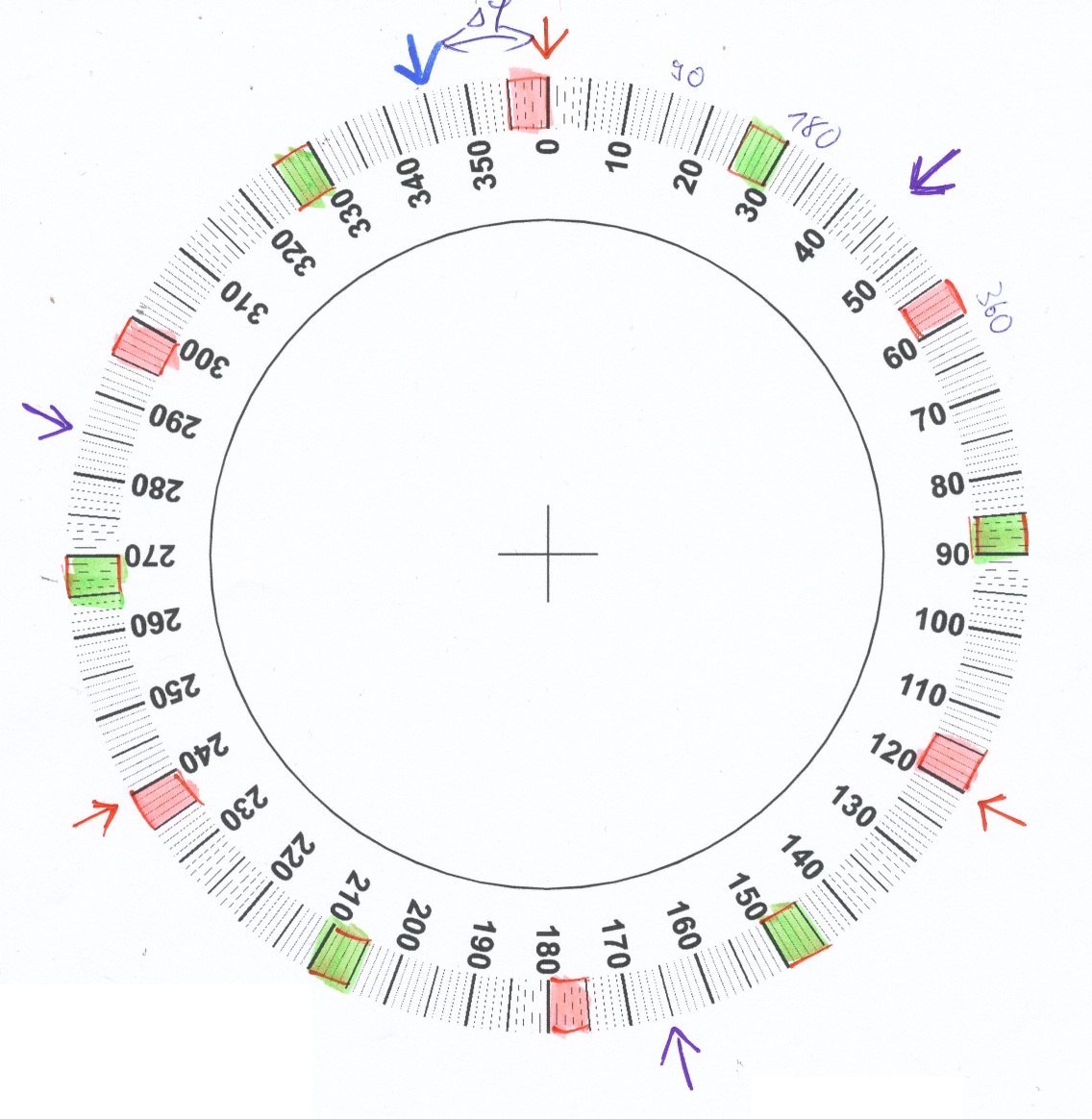
gradscheibe2.jpg
160 KB

Ok, der Winkel zwischen den Sensoren für die Kommutierung beträgt: phi_sens = 360°/(Anzahl Polpaare*Anzahl Sensoren) die Anzahl der Statoren beträgt: n_s = 360°/(phi_sens*2) Ich nehme an, dass dann in meinem Fall bei 9 Statoren, jede der 3 Zuleitungen an drei 120° versetzten Statoren ein Magnetfeld erzeugt. Nun hätte ich aber nicht deine Aussage erfüllt, dass die Sensoren genau zwischen den Statoren sitzen. Hierzu müsste ich vielleicht im Bild Sensor B and die Stelle von B2 setzen. Aber was macht das für einen Unterschied, das Signal das er liefert ist an B und B2 identisch.
Richtige Richtung. An B und B2 ist das Signal identisch. Bei 9 Statoren kann aber an Position B kein Sensor sitzten. Deshalb muß er an der Position B2 sitzen. Die Formel für die Statoren ist leider nicht richtig. Es gibt auch zwischenstufen, die damit nicht erfasst werden. Wichtig ist, dass Du zwischen dem mechanischen und elektrischen Drehfeld unterscheidest und damit natürlich auch die Position der Hallsensoren korrekt bestimmen kannst.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.