Hallo, ich habe gelesen, dass Quarze recht empflindlich gegenüber mechanischen Beschleunigungen sind. Ich möchte einen Mikrocontroller in einem sich drehenden Objekt betreiben. Somit wirkt zwangsweise eine ständige Beschleunigung auf den Quarz. Es gilt: a=w^2*r wenn ich mich recht entsinne. w= Winkelgeschwindigkeit r= Entfernung von Mittelpunkt. a= Beschleuningung Somit entstehen leider sehr große Beschleunigungskräfte. z.B. r= 0,05m w= 3000U/min = 50U/s= 50*2*PI rad/s a=(50*2*PI)^2*0,1m *rad² / s² = 5000m/s² Was macht ein Quarz bei solch einer starken Beschleunigung? Welche Alternativen gibt es? EDIT: Ich brache einen 16Mhz Takt für einen Atmega2560
Je kleiner, desto besser --> SMD-Quarz benutzen. Oder Keramik-Schwinger benutzen, die sind robuster als Quarze.
Danke für den Tipp So etwas? http://de.farnell.com/ael-crystals/c16m000000l003/resonator-ztt-16mhz/dp/1448129 http://de.farnell.com/murata/csalf16m0x55-b0/resonator-16-00mhz/dp/1161701 Wenn ja, muss ich noch auf die Resonanzimpedanz achten?
Ich wuerd mir eher Sorgen ueber das Kriechen von Zinn machen. Zinn verhaelt sich unter Belastung vie eine Fluessigkeit. Dauert einfach etwas laenger. Dh auch wenn man die Leiterplatte anschraubt, so fliesst das Zinn nach aussen. Wie lange sollen die 500*g denn wirken ? 1 Jahr ? 10 Jahre ?
Beim Standardquarz ist die Scheibe in je eine "Drahtlocke" eingeklemmt und mit Silber-Leitkleber angeklebt. Diese beiden Drähte sind Zuleitung und Halterung zugeleich. Da ist die Festigkeit nicht ganz so groß. Resonanz der Scheibe zusammen mit den Anschlussdrähten als Feder tun ihr Übriges. Übrigens: Am häufigsten werden Quarze bei der Montage gemordet, indem man ihre Anschlussdrähte mit einem Seitenschneider oder dergleichen kürzt: Das kurze scharf "Knips" erzeugt extrem hohe Beschleunigung an der Quarzscheibe und kann zum Bruch des Quarzes führen. Der langen Rede kurzer Sinn: Versuchs mit einem 16-MHZ-Quarz in dem HC49 Gehäuse mit Rastermaß 5,24 mm der flach gebaut ist. Da werden eher die Lötstellen der Anschlussdrähte aufgeben als das Innere des Quarzes. Für kommerziellen Einsatz einen Hersteller fragen, der kann Zahlen liefern bzw. Sonderanfertigungen herstellen.
>Ich wuerd mir eher Sorgen ueber das Kriechen von Zinn machen. Zinn >verhaelt sich unter Belastung vie eine Fluessigkeit. Dauert einfach >etwas laenger. Dh auch wenn man die Leiterplatte anschraubt, so fliesst >das Zinn nach aussen. Wie lange sollen die 500*g denn wirken ? 1 Jahr ? >10 Jahre ? Die Platine wird nur sporatisch privat verwendet. Eventuelle Verformungen lassen sich also durch eine regelmäßige Sichtprüfung ausschließen. Danke für den Hinweis, kannte den Effekt bis jetzt nur bei Glas in alten Kirchen. Denn dort floss das Glas über Jahrhunderte nach unten und somit ist das Glas unten dicker als oben. >Übrigens: Am häufigsten werden Quarze bei der Montage gemordet, indem >man ihre Anschlussdrähte mit einem Seitenschneider oder dergleichen >kürzt: Das kurze scharf "Knips" erzeugt extrem hohe Beschleunigung an >der Quarzscheibe und kann zum Bruch des Quarzes führen. Danke für den Hinweis, dass ist einleuchtend. Jedoch währe so eine Ursache im Eifer des Gefechts wohl nie aufgefallen. >Der langen Rede kurzer Sinn: Versuchs mit einem 16-MHZ-Quarz in dem HC49 >Gehäuse mit Rastermaß 5,24 mm der flach gebaut ist. Da werden eher die >Lötstellen der Anschlussdrähte aufgeben als das Innere des Quarzes. Ich bin nun ernsthaft am überlegen, nicht doch einen Keramikoszillator zu verwenden. Die Platine soll ein paar Jahrzehnte funktionieren und bei dem Preis einer Einzelanfertigung gehe ich lieber auf Nummer sicher. Es sind auch keine hohen Anforderungen an die Genauigkeit des Takts gestellt.
A. R. schrieb: > keine hohen Anforderungen an die Genauigkeit des Takts > gestellt. Reicht dann kein RC-Oszillator aus?
Zum Fliessen von Zinn... weshalb darf man Kupferlitzen beim Schraubklemmen nicht verzinnen, sondern muss sie mit einer Aderendhuelse versehen ? Weil das Zinn unter der Schraube wegfliesst und irgendwann, nach ein paar Jahren der Kontakt schlecht wird.
>A. R. schrieb: >> keine hohen Anforderungen an die Genauigkeit des Takts >> gestellt. >Reicht dann kein RC-Oszillator aus? Ich denke schon. Also +/-1% Abweichung sollte kein Problem sein. Die Frage ist halt, ob ein RC-Oszillator mehr Arbeit ist wie ein Kermikoszillator. So wie ich das verstanden habe, kann ich den Keramikresonator genau so wie einen Quarz zwischen die beiden XTAl Pins des Mikrocontrollers anschließen.
A. R. schrieb: > ob ein RC-Oszillator mehr Arbeit ist wie ein > Kermikoszillator. Sind 2 Bauteile statt ein Bauteil - gesetzt dein µC kann einen externen RC-Oszillator ohne weitere Zusatzbeschaltung zum Schwingen bringen.
Wenn ich das hier richtig verstanden habe, wird der Quarz dauerhaft mit 500 (und mehr) g betrieben. Ich kann mir beim besten Willen nicht vorstellen, daß ein Quarz das dauerhaft übersteht. In gängigen Datenblättern sind Stöße bis 60g angegeben, wenn ich recht erinnere (was schon heftig ist!). Bei nihct exakt kreisförmiger Bewegung gibt es Schwingungen in der Beschleunigung, und Starten sowie Abbremsen können auch noch recht abrupt sein. Besser wäre hier ein Festkörper-Oszillator, so wie etwa ein SAW oder halt SMD-RC. Wenn ich mir nun aber als Gedankenexperiment vorstelle, ich verwende eine Leiterplatte, die ich ausgewuchtet auf der drehenden Scheibe einer Flex anbringe, und die dann einschalte, dann würde ich sehr schnell in Deckung gehen wegen umherfliegender Bauteile, die sich "ausgelötet" haben. In meinen Augen fast unmöglich zu realisieren.
Ein externer RC Oszillator bringt gar nichts. Der interne ist sicher gut genug, solange kein UART betrieben werden muss. Das waeren dann Null Bauteile. Mich wuerd aber interessieren wie lange der Controller bei dieser Beschleunigung auf der Leiterplatte bleibt.
Interner RC Oszillator geht allerdings nur bis zu 8MHz bei den ATMegas. Wenn das reicht, dann ist das wohl die beste Realiesierungsmöglichkeit.
Danke für die Hinweise. Nachdem geklärt wurde, dass ein Quarz den Beschleunigungen nicht standhält (Danke @ Jochen Fe.) möchte ich eigendlich nur wissen, ob die oben genannten Bauteile wie in dem FAQ auf dieser Hompage an einen Mikrocontroller angeschlossen werden kann. FAQ: http://www.mikrocontroller.net/articles/AVR-Tutorial:_Equipment Schaltplan aus FAQ: http://www.mikrocontroller.net/articles/Datei:Resonator.png Die beiden Bauteile: http://de.farnell.com/ael-crystals/c16m000000l003/resonator-ztt-16mhz/dp/1448129 http://de.farnell.com/murata/csalf16m0x55-b0/resonator-16-00mhz/dp/1161701 >Der interne ist sicher gut genug, Der interne Takt hat 128kHz keine 16Mhz >Mich wuerd aber interessieren wie lange der Controller bei >dieser Beschleunigung auf der Leiterplatte bleibt. Wenn du möchtest kann ich dich in ca. 6Monaten darüber Informieren. Ich glaube jedoch nicht, dass sich ein TQFP 100 Gehäuse so einfach lösen wird. Das selbe gilt für SMDs der Größe 0805. >A. R. schrieb: >> ob ein RC-Oszillator mehr Arbeit ist wie ein >> Kermikoszillator. >Sind 2 Bauteile statt ein Bauteil - gesetzt dein µC kann einen externen >RC-Oszillator ohne weitere Zusatzbeschaltung zum Schwingen bringen. Habe mich leider noch nie mit der Takterzeugung beschäftigt. Deswegen währe ich über etwas Hilfe sehr erfreut. Ich verwende einen Atmega2560. >Wenn ich mir nun aber als Gedankenexperiment vorstelle, ich verwende >eine Leiterplatte, die ich ausgewuchtet auf der drehenden Scheibe einer >Flex anbringe, und die dann einschalte, dann würde ich sehr schnell in >Deckung gehen wegen umherfliegender Bauteile, die sich "ausgelötet" >haben. Vorsicht ist immer gut. Die Geschwindigkeit kann langsam hochgedreht werden. Bei dem geringem Gewicht von SMD-Bauteilen sollten diese mechanisch gehalten werden.
Ich kann mich gut an die Aussage eines Testingenieurs im Phoenix-Testlab in Blomberg erinnern, der mir sagte: Wir können hier sozusagen alles auseinandernehmen, was wir auf dem Rütteltisch spannen, es ist nur eine Frage der Frequenz und de Amplitude. (War nicht das einzige Mal Rütteltisch und nicht die einzige derartige Aussage) Bei 500+ g stellt sich diese Frage m. E. gar nicht mehr. Ein Bekannter lötete SMD-Bautele mit Virliebe durch harte Schläge aus. Erfolgreich - auch wenn ich mir nicht vorstellen könnte, diese Bauteile jemals wieder in einer Schaltung einzusetzen, von der ich irgendeine Funktion erwarten würde......
A. R. schrieb: > Der interne Takt hat 128kHz keine 16Mhz er hat scheinbar beides: Datasheet Seite 42 > The device is shipped with internal RC oscillator at 8.0 MHz sind zwar leider nicht die 16Mhz aber eventuell reicht das ja.
Der eine interne RC ist mit 8MHz angeschrieben, kann aber durch das OSCCAL Byte hochgedreht werden... lass mich nachschauen ... Seite 411 ... auf ueber 14MHz.
A. R. schrieb: > Habe mich leider noch nie mit der Takterzeugung beschäftigt. Deswegen > währe ich über etwas Hilfe sehr erfreut. > Ich verwende einen Atmega2560. Ich hab mal in dessen Datenblatt nachgesehen; die Option des externen RC-Oszillators wurde wohl weggespart. Ist also nich :( Der interne RC-Oszillator geht bis 8MHz; es gibt noch einen einen weiteren mit 128kHz. Statt eines Resonators kannst du auch einen "Silicon Oscillator" wie z.B. http://www.linear.com/pc/productDetail.jsp?navId=H0,C1,C1096,P9570 nehmen, sind leider aber auch ein bisschen teurer. Da diese wie der Name sagt nur aus Si bestehen, sollten diese auch resistent gegenüber hohen Beschleunigungen sein. Oh, steht sogar im Datenblatt auf der ersten Seite >APPLICATIONS >[...] >High Vibration, High Acceleration Environments
Was soll den ein externer RC wenn der eine Interne zwischen 4 und 15MHz laufen kann ?
Ob Keramikresonatoren derartigen Belastungen gewachsen sind halte ich für Zweifelhaft. Die haben auch nicht die extrem stabile Aufhängung, wenn auch besser. Ich würd mal sagen: Versuch macht kluch
Nix da mit 15MHz interner Takt, da hilft auch kein Flaschenbier! Aus dem Datenblatt: The Oscillator Calibration Register is used to trim the Calibrated Internal RC Oscillator to remove process variations from the oscillator frequency. A pre-programmed calibration value is automatically written to this register during chip reset, giving the Factory calibrated frequency as specified in Table 30-1 on page 371. The application software can write this register to change the oscillator frequency. The oscillator can be calibrated to frequencies as specified in Table 30- 1 on page 371. Calibration outside that range is not guaranteed. Note that this oscillator is used to time EEPROM and Flash write accesses, and these write times will be affected accordingly. If the EEPROM or Flash are written, do not calibrate to more than 8.8 MHz. Otherwise, the EEPROM or Flash write may fail.
>Der eine interne RC ist mit 8MHz angeschrieben, kann aber durch das >OSCCAL Byte hochgedreht werden... lass mich nachschauen ... Seite 411 >... auf ueber 14MHz. Super vielen Dank für die Information! Wusste nicht dass man den internen Takt derart verstellen kann. EDIT: Oder auch doch nicht. Habe gerade den Post von Noname gelesen.
Ich verstell das OSCCAL beim Booten, resp zur Laufzeit. Ich hab auch eine Routine zum Abgleichen des internen RC an den 32kHz quarz. So erreiche ich UART praezision, mit einem 32kHz und dem RC.
Jetzt hat die Overclocker Szene wohl auch schon die armen Atmegas in Besitz genommen. Am besten den Chip noch mit flüssigem Wasserstoff kühlen. Für seiöse Projekte, die auch noch nach einiger Zeit funktionieren sollen, würde ich mich an die Vorgaben des Datenblatts halten.
Angehängte Dateien:
-

Unbenannt.png
6,1 KB
{kind=link}
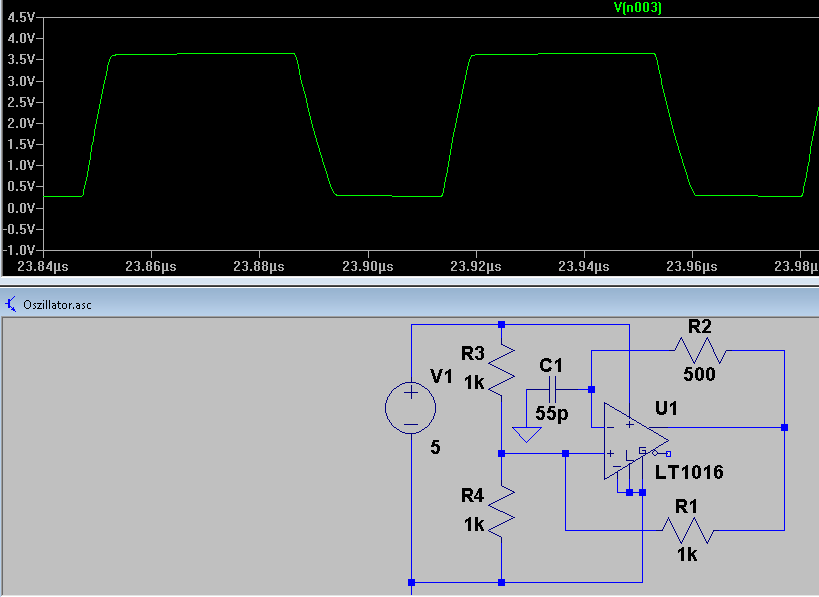
Ich hab mir mal die Bauteile von Luk4s K. angeschaut. Leider bekomme ich die nicht in 16Mhz. Ggf. könnte ich jedoch 32Mhz erzeugen und das dann mit irgendwelchen Flipflops teilen. Ich habe im Anhang einen kleinen RC-Oszillator. Würde diese Signalqualität als Takt ausreichen?
Bau den RC Oszillator besser mit Schmitt Triggern (74HC14). Aber 1% schaffst du damit sicher nicht über einen moderaten Temperaturbereich.
A. R. schrieb: > Leider bekomme ich die nicht in 16Mhz. Dann nehmen wir eben die mit Widerstand einstellbaren z.B. http://www.linear.com/pc/productDetail.jsp?navId=H0,C1,C1096,P2186
>Jetzt hat die Overclocker Szene wohl auch schon die armen Atmegas in
Besitz genommen. Am besten den Chip noch mit flüssigem Wasserstoff
kühlen.
Für seiöse Projekte, die auch noch nach einiger Zeit funktionieren
sollen, würde ich mich an die Vorgaben des Datenblatts halten.
Also. Nochmals das Datenblatt lesen ... Bei Flash und EEPROM write
sollte man nicht oberhalb 8.8MHz sein.
Geht doch. Da kann man sich dran halten. Wo ist das Problem ? Da ist
nichts mit Overclocken...
@ Luk4s K. Vielen Dank, bin gerade total von der Hilfe hier im Forum begeistert. Die hätte ich eigendlich auch selber finden müssen. Übe gerade ein bisschen Elektronik für eine Klausur nächste Woche bin also nur nebenbei am schreiben. Also Entschuldige, dass ich nicht selber gesucht habe.
@Heia Jetzt-aber: Dann mußt du aber deinem C-Compiler verbieten ins EEPROM zu schreiben. Bei mir ist das EEPROM dazu da, daß es auch während des Programmablaufs persistente Daten geschrieben bekommt. On chip RC Oszillatoren sind eine äußerst heikle Angelegenheit und die Firma Atmel beschränkt die obere Grenzfrequenz nicht aus Jux und Tollerei auf lediglich 8 MHz nominal. Mehr kann in Grenzen gehen muß aber nicht. Das hat nichts damit zu tun, daß die Bausteine mit externem Takt 16 oder gar 20MHz vertragen. Wenn der on chip Oszillator zu stottern anfängt ist für das on chip EEPROM und evtl. auch on chip Flash beim fashen via ISP Schicht im Schacht.
Luk4s K. schrieb: > A. R. schrieb: >> Leider bekomme ich die nicht in 16Mhz. > > Dann nehmen wir eben die mit Widerstand einstellbaren > z.B. http://www.linear.com/pc/productDetail.jsp?navId=H0,C1,C1096,P2186 oder die digital einstellbaren von Linear http://parametric.linear.com/html/silicon_oscillators oder die wesentlich genaueren von SiTime oder Discera z.B. http://sitime.com/products/low-power-oscillators/sit8003 oder http://www.discera.com/product-standard-cmos-oscillator.html (Testdaten von Discera http://www.skysoon.com/download/pdf/mems.pdf)
Arc Net schrieb: > oder die digital einstellbaren von Linear Da sehe ich ein kleines Problem. >Power-Up State >When power is first applied to the LTC6903/LTC6904, all >register values are automatically reset to 0. This results in an >output frequency of 1.039kHz D.h. nach dem Einschalten läfut der AVR mit 1kHz. Da sich die die Taktfrequenz pro Takt um max 2% ändern darf, muss der AVR den Oszillator langsam auf 16MHz einstellen. Dabei ist zu hoffen, dass keine Glichtes auftreten, die den AVR stehen bleiben lassen.
Luk4s K. schrieb: > Arc Net schrieb: >> oder die digital einstellbaren von Linear > Da sehe ich ein kleines Problem. >>Power-Up State >>When power is first applied to the LTC6903/LTC6904, all >>register values are automatically reset to 0. This results in an >>output frequency of 1.039kHz > D.h. nach dem Einschalten läfut der AVR mit 1kHz. Da sich die die > Taktfrequenz pro Takt um max 2% ändern darf, muss der AVR den Oszillator > langsam auf 16MHz einstellen. Dabei ist zu hoffen, dass keine Glichtes > auftreten, die den AVR stehen bleiben lassen. Das kommt davon, wenn man schon lange nicht mehr mit AVRs gearbeitet hat und vergisst, dass der Takt nicht im Betrieb umgeschaltet werden kann... Zur Not könnte man den Takt einstellen (, dann den Controller in den Power-Down versetzen) und auf den Watchdog(-Interrupt) warten...
Arc Net schrieb: > Zur Not könnte man den Takt einstellen (, dann den Controller in den > Power-Down versetzen) und auf den Watchdog(-Interrupt) warten... Sinnvoller wäre es zuerst den Watchdog aufzuziehen und dann den Takt umzustellen, da man nicht sicher sein kann, ob der AVR die paar takte nach dem Senden der entsprechenden Instruktionen an den Oszillaor noch nicht stehen bleibt und den Watchdog anknipsen kann. Wenn man den Watchdog zuvor aufzieht, ist sichergestellt, dass der AVR zurückgesetzt wird.
Die programmierbaren Oszillatoren gibt es doch auch mit EEPROM. Man muss sie nur einmal (z.B. außerhalb der Zielschaltung) programmieren und dann nie wieder. Edit: Beispiel DS1077: http://www.sparkfun.com/products/9089 Grüße, Peter
>Dann mußt du aber deinem C-Compiler verbieten ins EEPROM zu schreiben.
Uiii, mein Compiler tut genau was ihm sage, nicht irgend was Diffuses.
Wenn nun mein Programm am EEPROM was zu schreiben haette ...und das tut
es nicht einfach so irgendwann wenns nicht Gescheiteres zu tun hat...
dann kann ich den Clock ja kurz runtersetzen. Ich stelle mir die
Funtionalitset dieser rotierenden Anwendung als eher einfach vor. Eher
nichts mit Buttons, Menues, Display, usw. Sondern eher eine
Messwertumformung, die nun mal auf dem rotierenden Frame geschehen muss.
zB Dehnmessstreifen auswerten, oder so.
> Wenn ich mir nun aber als Gedankenexperiment vorstelle, ich > verwende eine Leiterplatte, die ich ausgewuchtet auf der > drehenden Scheibe einer Flex anbringe, und die dann einschalte, > dann würde ich sehr schnell in Deckung gehen wegen umherfliegender > Bauteile, die sich "ausgelötet" haben. > In meinen Augen fast unmöglich zu realisieren. > Autor: Philipp Bigott (frickelfreak) Datum: 01.01.2011 22:42 > flex dreht lannge nicht schnell genug für sowas 3000 rpm und 5 cm Radius ergeben 500 G ?? Glaube ich einfach nicht. Dann müsste eine Flex-Scheibe ja 8000 G aushalten. ---------------- Wenn das Fließen ein Problem darstellt, ordne die Platine senkrecht an, damit das IC senkrecht auf die Platine gedrückt wird. Nimm den internen RC und gut ist's. Was soll denn das eigentlich werden, wenns fertig ist?
Skeptiker schrieb: > 3000 rpm und 5 cm Radius ergeben 500 G ?? > Glaube ich einfach nicht. Ist aber rechnerisch so. Aber nur am äußersten Punkt. Näher an der Achse ist die Beschleunigung geringer; am Achsen-Mittelpunkt ist sie Null. > Dann müsste eine Flex-Scheibe ja 8000 G aushalten. Bei Flex-Scheiben sind normalerweise max. 80m/s Schnittgeschwindigkeit zulässig. Ich nehme jetzt mal als Beispiel eine 125mm-Scheibe (also 62,5mm Radius) Mit der Formel [math]a = \frac{v^2}{r} ergibt sich eine Beschleunigung von gut 100000m/s²; also ca. 10000 G. Die 8000 G sind also gar nicht so falsch... Das Ganze wirkt erstmal ziemlich unglaubwürdig; aber man muss bedenken dass die Kraft gleichmäßig verteilt wird. Dazu mal ein etwas anschaulicheres Beispiel: Die dünnwandigen Einweg-Plastikflaschen wirken ja sehr instabil. Allerdings platzen sie erst bei ca. 6...12 bar Druck (siehe z.B. Youtube ;)). Bei 10 bar wirkt auf die Wandung (ich sage jetzt mal, die hat 600cm² Fläche) eine Kraft von 60kN; bzw. 6 Tonnen...
>Wenn das Fließen ein Problem darstellt, ordne die Platine senkrecht an,
damit das IC senkrecht auf die Platine gedrückt wird.
Das waer dann eine Rohr-Innenseite. Genau. Aber, mach mal. Nee. Man
muesste die gesammte Elektronik grad neben der Achse platzieren. Muesste
auf einem 1cm breiten Ring machbar sein. Nix DIL auf 5cm Breite
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.