Guten Tag Zusammen Ich schreibe gerade eine Bachelorarbeit in der Automatisierungstechnik und brauche ein bisschen Hilfe bei der Programmierung meiner Schrittmotoren. Ich verwende zwei Schrittmotoren um eine Platte parallel zu einer zweiten zu bewegen. Dafür möchte ich die fertige Schrittmotorsteuerung SMCI33 von Nanotec verwenden. Meine Idee ist das ich die Motoren erst beide auf die untere Platte laufen lasse, damit diese wirklich parallel ausgerichtet ist und von dieser Nullposition nur relativbewegungen durchführen kann. Ich hab nur das Problem das ich nicht weiß wie ich genau den Anschlag der Motoren erkennen soll. Kann ich einfach den Motor so lange drehen lassen bis die Encoder mit melden das diese sich nicht mehr ändern und der Motor somit am Anschlag steht? Oder hat die Motorsteuerung wohl eine Rückmeldung wenn der Motor einen Anschlag erreich hat und somit mehr Strom zieht? Vielleicht eine Art sicherheitsabschaltung? Ich weiß nicht ob ich damit bei euch richtig bin, aber vielleicht kann mir jemand helfen. Mfg Hiran
kannst du denn keine Endlagenschalter verwenden? Mikrotaster oder Gabellichtschranken?
Hiran schrieb: > Kann ich einfach den Motor so lange drehen lassen bis die Encoder mit > melden das diese sich nicht mehr ändern und der Motor somit am Anschlag > steht? Das kommt darauf an, ob deine Mechanik dieses "Auf Block" fahren aushält. Falls ja, ist das eine gute Möglichkeit, jedesmal ohne Endlagenschalterjustierung einen definierten Nullpunkt zu haben. Evtl. reicht es zum Schutz der Mechanik schon aus, wenn du nur mit sehr geringer Geschwindigkeit referenzierst.
Schau mal bei Trinamic nach Stallguard. Damit lässt sich über den Lastwinkel des Motors ohne Initiatoren ein Endanschlag erkennen. Ein Beispiel IC wäre TMC262. Dafür gibt es ein komplettes Evalboard.
Jens schrieb: > Schau mal bei Trinamic nach Stallguard. Warum, wenn da offebar eh' Motoren mit Encodern verwendet werden?
Zweifache Sicherheit? Gabellichtschranke kurz vor Anschlag? Das mehrfach kräftige Auffahren auf den Rand ist gelegentlich mit erhöhtem Verschleiß oder Lärm verbunden. Daher wäre eine Lichtschanke vorher zur Einleitung der Bremsphase zu überlegen. Nur Strom messen beim Anschlag funktioniert solange wie die Mechanik NOCH nicht verschmutzt und schwergängig ist.
Lothar Miller schrieb> Warum, wenn da offebar eh' Motoren mit Encodern verwendet werden? Auch bei der Verwendung von Encodern ist eine Referenzfahrt erforderlich.
An den Anschlag fahren haben manche Floppylaufwerke gemacht, rattert. Ein Endschalter z.B. als Gabellichtschranke ist eleganter, aber nicht unbedingt präzizer. Ein Endschalter der sich aus der Encoderscheibe ergibt ist präzise, rattert nicht, ist aber vielleicht nicht in deiner Encoderscheibe drin.
Jens schrieb: >>> Stallguard >> Warum, wenn da offebar eh' Motoren mit Encodern verwendet werden? > Auch bei der Verwendung von Encodern ist eine Referenzfahrt erforderlich. Es ging um die Blockade-Erkennung, nicht um die aktuelle Position...
wow, was ne Fülle an Antworten. Ich hab bei der Anlage eine Kalibrierungsphase die ruhig nen paar min dauern darf. Deshalb dachte ich, dass ich sehr langsam bis Anschlag fahre. Da der Motor eh mit 500-1000 Schritten/Umdrehung laufen muss damit ich später auf 0,001mm genau stellen kann sind eh keine großen Verfahrgeschwindigkeiten möglich. Da das ganze als Low-Budget laufen soll dachte ich, das nen mechanischer Anschlag ausreichen würde und eine Lichtschranke nicht notwendig ist. Endschalter kann ich natürlich auch keine benutzen, da der Bauraum viel zu eng ist und die kleinen Ausführungen sicher wieder ins Geld gehen. Ich bin derzeit eh schon 400€ überm Budget. Die andere Frage die sich im laufe des Tages herrausgestellt hat, ist folgende. Kein ein Schrittmotor 1,8 pro Schritt der im Microschritt 1/32 läuft seine Position genau halten bei Last oder ist die Gefahr im Microschritt größer Schritte zu verlieren.
1.Endschalter prellen und sind wahrscheinlich ungenau. 2.Bei zu großer mechnischer Belastung können Schritte verloren gehen.
Die Möglichkeit Schritte zu verlieren ist im Microstepbereich natürlich größer! Als ich mit Schrittmotoren gearbeitet habe war es auch nötig zu verifizieren ob auch immer der gleiche Verfahrweg und Position erreicht wird, das hat mich einiges an Zeit und Nerven gekostet und setzt auch einen Testaufbau voraus wo die Motoren auch dasselbe Drehmoment aufbringen müssen. Was ich damit meine ist das die Kraft die der Motor aufbringen muß um zb. eine Schraube (mit Hilfe einer Übersetzung zb. Zahnrad) zu drehen beim Testaufbau dieselbe Kraft sein muß wie bei der Anwendung. Tja, ist alles nicht so einfach zu wuppen wie sich das zuerst anhört... Achja, ich hab bei meinem Aufbau festgestellt das 1/16 noch Sinn machte und 1/32 nicht mehr, aber das ist ja auch alles eine Frage des Motors, Getriebes, Ansteuerung und wie man was zum drehen bringt.
Moin, ohoh, wenn da nicht mal wieder Auflösung und Genauigkeit durcheinander gehen.... Wenn Encoder vorhanden sind haben die nicht vielleicht eine Indexspur für die Nullposition? Mit Kraft auf einen Anschlag drücken und hoffen, das der/die Encoder keine Schritte mehr zählen ist eine ziemliche Holzhammer Methode... Stepper im Teilschrittbetrieb sind keineswegs genau was die Schrittweiten angeht, lies dir das mal im Datenblatt durch. Schon im Vollschrittbetrieb können die Schritte ziemlich unterschiedlich ausfallen. Wenn du tatsächlich eine Genauigkeit von 1µm erreichen willst musst du dir wirklich ernsthafte Gedanken über die Referenz machen; insbsondere würde ich erst einmal checken, ob die ganze Mechanik die entstehenden Kräfte verarbeiten kann, ohne das sich alleine dadurch schon größere Fehler einstellen => das wird richtig elendig, wenn sich die "konstante" Nullposition verbiegt und man sich nur noch über die Ergebnisse wundert. -- SJ
> ich später auf 0,001mm genau stellen kann sind eh keine großen > Verfahrgeschwindigkeiten möglich. Da das ganze als Low-Budget laufen > soll dachte ich, das nen mechanischer Anschlag ausreichen würde Meine Messuhr sagt mir, daß ein Anschlag wo plangefräst vollflächig Metall auf Metall liegt, auf keine 1/1000mm genau ist. Da ist Rost und Staub drauf, das macht 0.02mm, also 20µm aus.
Schon mal was von Glasmaßstab gehört?? Wird hauptsächlich im Maschinenbau verwendet. Es gibt Glasmaßstäbe die die Absolut position ohne Kalibrierung, also ohne hin und her fahren, melden können. Stichwort Haidenhain
Angehängte Dateien:
-

Folienband.JPG
180 KB
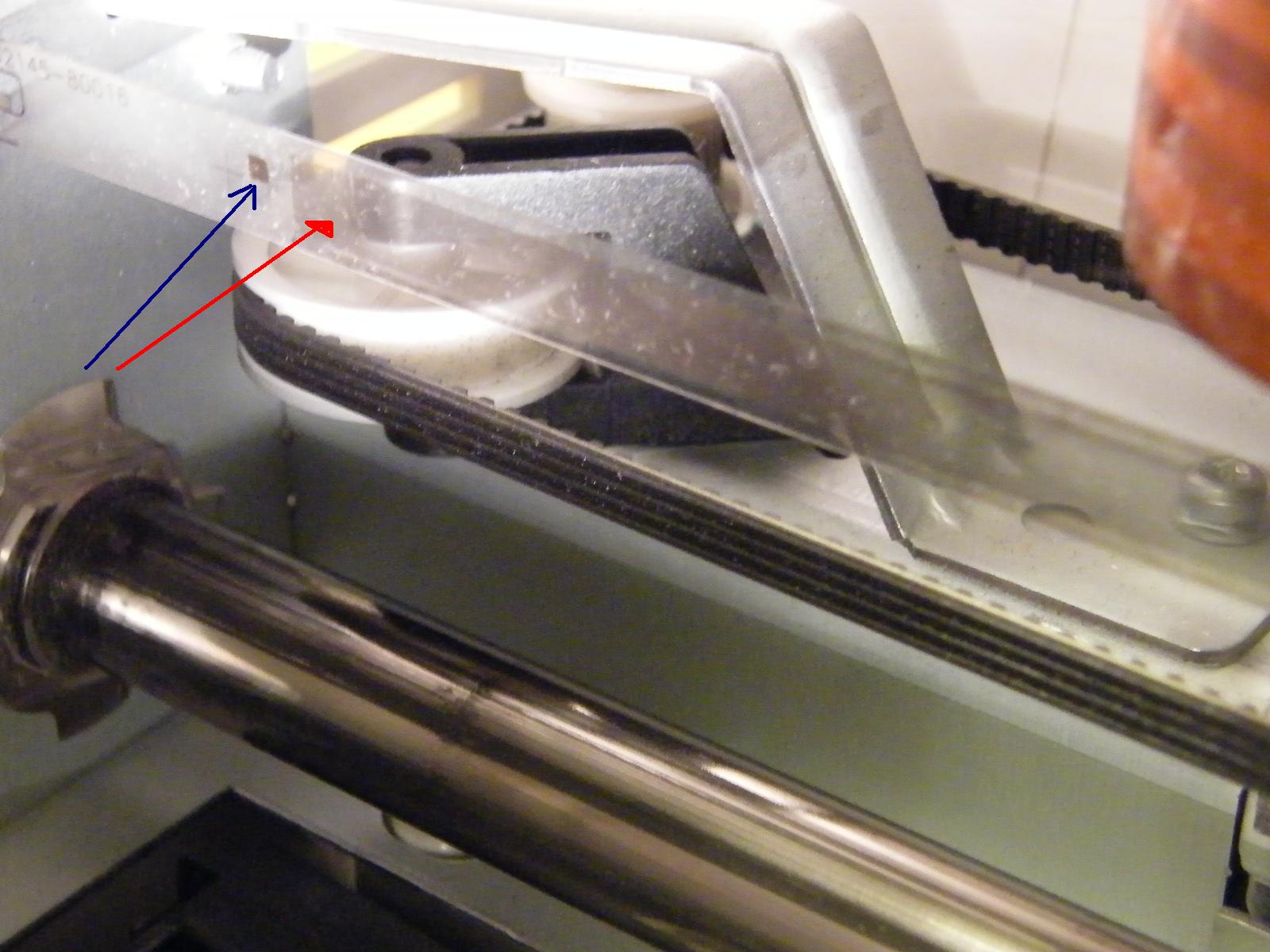
Genauigkeit ist immer relativ. Beispiel-Bild anbei HP-Folienband zur Steuerung des Druckwagens.
Ein Glasmassstab ist doch eher weniger geeignet um im mikrometer zu stellen. Allein die Teilung ist doch gröber. Die einzige Möglichkeit die ich gefunden habe um so genau die Position messen zu können ist eine Lasertriangulation. Keyence erreicht da Wiederholgenauigkeiten im 100nm Bereich. ABER dann kostet die Sache schnell 5000-6000€ mehr. Ich hab mich bei der ersten Beschreibung etwas plump ausgedrückt. Es sind nicht wirklich zwei Vollmaterialplatten, sondern eher zwei 1cm breite Anschläge gegen die eine Platte gefahren wird. Mein Motor leistet aber nur 1 Nm. Ist die Verformung bei dieser Größenordnung nicht minimalst, oder wenigsten berechenbar das die Verformung später verrechnet werden kann? Ja die Resolver haben einen Index Schritt. Aber die Platte wird in eine Halterung eingesetzt und diese wird dann erst Verfahren. Wenn ich den Index verwende habe ich nur die Position der Halterung und die Platte kann da "irgendwo" eingeklemmt sein. Deshalb wollte ich die Endanschläge nehmen auf die ich direkt mit der Platte fahren kann.
Wo ich gerade mal bei Haidenhain bin. Gibt es Messtaster die solch eine Genauigkeit erreichen?
Moin, yep, es wird Auflösung und Genauigkeit verdreht.... Ein Laserabstandssensor mit 0,1µm GENAUIGKEIT ist nicht für Kleingeld zu haben, lese dir bitte die Datenblätter genau durch und nicht nur die Buzzwords in den Prospekten. Messtaster für diesen Bereich sind übrigens problemlos zu haben, wie groß war dein Budget? Ich habe hier im Nebenraum ein 50nm Exemplar stehen, damit kann man Klasse messen wenn man mal ruckartig aufsteht oder die Sonne auf den Tisch scheint.... Kannst du mal ein Bild von deinem Aufbau machen, vermutlich hast du andere Hürden vor dir, wenn du wirklich etwas auf 1µm GENAU positionieren willst. -- SJ
Genau das ist ja das Problem. Ich brauche die Genauigkeit. Aber ich hab mir das heute nochmal angesehen und habe den Bauraum für Endschalter frei räumen können. Allerdings hab ich noch keinen gefunden der im Mikrometer Bereich reproduzierbare Ergebnisse gibt. Ich denke das es leichter ist eine plastische Verformung oder Spiel in der Mechanik zu verrechen, da diese ja gleich bleibt. Ein Endschalter mit einer Hysterese im 10 Mikrometerbereich wird da doch ungenauer sein und nicht berechenbar. Oder irre ich mich da? Mein Budget ist quasi schon überreizt. Deshalb suche ich erstmal einen köstengünstigen Aufbau um zu zeigen das es funktioniert und ich nurnoch das oder das brauche damit es so genau ist wie gefordert. Praktische Überzeugungsarbeit ;)
BKone schrieb: > Die Möglichkeit Schritte zu verlieren ist ... größer! Nicht mit einem Encoder am Schrittmotor. Der verliert sicher keinen Schritt.
Richtig, mit einem Encoder wird der Schrittverlust behoben! Meine Aussage war auch mehr darauf gerichtet ob bei einem Schrittmotor bei unterschiedlichen Einstellungen des Microstepbereiches eher mal Schritte nicht ausgeführt werden. Läuft ja am Ende alles über die Ansteuerung der Spulen (4 bei bipolar, 2 bei uni). Sind die Schritte denn auch immer gleich groß? Whatever, meistens hat man ein Getriebe und alleine das Getriebespiel sorgt schon dafür das die Schritte am Anfang nicht konstant sind. Sicher ist es möglich dies rauszurechnen...hat das denn mal jemand probiert? Es wäre sicherlich interessant ein Foto von dem Aufbau zu sehen! Da kann man ja sonst eine Menge reden, ich persönlich kann mir das mit den Platten und Anschlägen gerade nicht vorstellen... Gibt es denn einen Aufbau der dir zeigt wie sich dein Motor/Getriebe in dem Bereich verhält (bei der aufzuwendenen Kraft)? Sollte man sonst nachvollziehen welche Genauigkeit wiederholbar möglich ist? Zum Thema Auflösung und Genauigkeit, gehe ich da recht in der Annahme das man rechnerisch mit den Microstepbereich (1/16, 1/32), der Übersetzung/Getriebe und zb. dem Gang der Schraube eine bestimmte Auflösung erreichen kann und die Genauigkeit die mögliche Wiederholbarkeit der angesteuerten Wege bedeutet? best wishes Andi
Hatte mal mit Ingenieuren zu tun, die in Nanometer rechnen. Statt einem Getriebe benutzen sie Schrittmotor, Hydraulikzylinder und eine Hydraulikpumpe mit winzigem Kolbendurchmesser. "Auf Nullpunkt fahren" versuchen sie gar nicht erst. Bis alles auf Betriebstemperatur ist, produzieren die Maschinen sowieso nur Ausschuss. Die produzierten Werkstücke werden vermessen und der Nullpunkt anhand der Abweichungen eingestellt. Grüße und viel Erfolg mit der Bachelorarbeit!
Streng Geheim schrieb: > Die Möglichkeit Schritte zu verlieren ist im Microstepbereich natürlich > größer! Unfug! Mikroschritte sind nichts anderes als aufgeteilte Vollschritte. Im Mikroschrittbetrieb kann eine Belastung zu einem "federnden" Positionsfehler führen, d.h. der Fehler verschwindet wieder, wenn die Last weg ist. Aber die Gefahr, echt Schritte zu verlieren ist evtl. im Mikroschrittbetrieb sogar geringer, da die Beschleungigungsspitzen beim Umschalten des Feldes geringer sind.
Hiran schrieb: > Ein Glasmassstab ist doch eher weniger geeignet um im mikrometer zu > stellen. Allein die Teilung ist doch gröber. Nutzt man bei einem Glasmassstab eine Sinusinterpolationserfassung ist das sehr wohl möglich.
Tip schrieb: > Streng Geheim schrieb: >> Die Möglichkeit Schritte zu verlieren ist im Microstepbereich natürlich >> größer! > > Unfug! > > Mikroschritte sind nichts anderes als aufgeteilte Vollschritte. Im > Mikroschrittbetrieb kann eine Belastung zu einem "federnden" > Positionsfehler führen, d.h. der Fehler verschwindet wieder, wenn die > Last weg ist. Aber die Gefahr, echt Schritte zu verlieren ist evtl. im > Mikroschrittbetrieb sogar geringer, da die Beschleungigungsspitzen beim > Umschalten des Feldes geringer sind. Unfug!! Vollschritte sind viel sicherer mit den Spulen einstellbar, wenn man sich überlegt diesen dann noch in 32 Microsteps aufzuteilen erfordert das ein sehr gutes Handling der Spulen. Ist doch klar das man eher einen der kleinen Steps verliert als einen Vollschritt. Das ist hier ja nicht das Glücksrad wo wir mal eben den Motor drehen und er bleibt auf einen der Felder stehen, hier gibt es kein Raster in das man locker einpendelt. Gruß Andi
Hallo Hiran! > Ich hab bei der Anlage eine Kalibrierungsphase die ruhig nen paar min > dauern darf. Deshalb dachte ich, dass ich sehr langsam bis Anschlag > fahre. Da der Motor eh mit 500-1000 Schritten/Umdrehung laufen muss > damit ich später auf 0,001mm genau stellen kann sind eh keine großen > Verfahrgeschwindigkeiten möglich. Da das ganze als Low-Budget laufen > soll dachte ich,... 1µm und Low-Budget sind schonmal ein Widerspruch in sich. > Die andere Frage die sich im laufe des Tages herrausgestellt hat, ist > folgende. Kein ein Schrittmotor 1,8 pro Schritt der im Microschritt 1/32 > läuft seine Position genau halten bei Last oder ist die Gefahr im > Microschritt größer Schritte zu verlieren. Das kommt darauf an, ob du den Motor gesteuert oder geregelt betreibst. Mit Encoder und dem genannten Nanotec-Treiber ist ja prinzipiell beides möglich. Bei open-loop (klassische Schrittmotor-Betriebsweise) kann man mit Mikroschritt die Auflösung steigern, aber nicht die Genauigkeit. Das wird gerne in einen Topf geworfen. Ein gesteuerter Schrittmotor wird unter Belastung ausgelenkt, und zwar im worst-case (an der Lastgrenze) bis zu 2 Vollschritte! Bei closed-loop (geregelter Betrieb) hängt die Genauigkeit in erster Linie vom Geber ab (das ist ein Encoder, kein Resolver!). Und natürlich von den Reglereinstellungen, wobei ein niedrig auflösender Geber wieder die Reglereinstellungen begrenzt. Um so niedriger die Reglereinstellungen, um so "weicher" ist der Antrieb, d.h. um so größer ist die Auslenkung des Rotors bei gleicher Belastung. Erfahrungsgemäß ist es für Einsteiger nicht so einfach, gute Reglereinstellungen zu finden. Die Nanopro-Software macht das auch nicht einfacher... Mit freundlichen Grüßen Thorsten Ostermann
> Vollschritte sind viel sicherer mit den Spulen einstellbar, wenn man > sich überlegt diesen dann noch in 32 Microsteps aufzuteilen erfordert > das ein sehr gutes Handling der Spulen. Ist doch klar das man eher einen > der kleinen Steps verliert als einen Vollschritt. Unfug!! Man kann keinen kleinen Schritt verlieren. Ein Schrittmotor kann bei Mikroschritt, also der dazugehörigen Veränderung der Spulenströme, eventuell nicht genau an der Winkelstellung stehen, die dem kleinen Schritt entspricht, aber im Laufe eines Vollschritts bleibt ihm nichts anderes übrig als diesen Fehler in den nächsten Mikroschritten wieder aufzuholen, denn Vollschritte sind mechanisch festgelegt, Mikroschritte ergebn sich aus Magnetfeldgeometrien die nicht ganz linear sein müssen. Ein Schrittmotor mit Mikroschritten fährt immer sauberer und zuverlässiger als mit Vollschritten.
MaWin schrieb: > Ein Schrittmotor mit Mikroschritten fährt immer sauberer und > zuverlässiger als mit Vollschritten. Auch ein Schrittmotor kann bei Belastung etwas "Schlupf" haben. Bleibt noch die Frage, wie sich der Schrittmotor genau zum Encoder verhält und welche mechnischen Differenzen unterwegs auftreten. Wahrscheinlich muß die Genaugigkeit hinterher nochmals errechtet bzw. korrigiert werden?
> Auch ein Schrittmotor kann bei Belastung etwas "Schlupf" haben.
Das ist kien Schlupf in dem Sinne,
daß die Elektronik 300 Umdrehungen per Magnetfeld vorgibt,
und der Motor nur 298,5 dreht,
sondern wenn der Schrittmotor bei 45.2 Grad steht,
kann er durch Belastung auf 45.4 Grad gezogen werden,
er gibt elastisch nach wie eine Welle mit Torsion
(nicht akkumulierend),
aber hat keinen Schlupf wie ein Reibrad
(Fehler aufsumierend).
WENN der Motor wirklich Schlupf hat, hat er Schritte
übersprungen, weil sein Drehmoement nicht ausreichte,
war er also unterdimensioniert für die Last.
Streng Geheim schrieb: > Hatte mal mit Ingenieuren zu tun, die in Nanometer rechnen. Aha, mit mir? :-) Ich habe schon Messungen im Sub-Nanometer-Bereich gemacht. Interessanterweise kann man da vieles sogar noch per Hand justieren. Ein Mikrometer ist der Bereich, den man vielleicht gerade noch so ohne ein passendes Messssystem positionieren kann. Man braucht aber auf jeden Fall eine hohe Übersetzung. Und ich denke, man braucht von vornherein fertige Motore, die von sich aus im Mikrometerbereich positionieren können. Es gibt da viele Firmen, die sich auf solche Antriebe (z.B. Inchworm) spezialisiert haben. Einen Endschalter der um-genau abschalten kann, gibt es nicht. Mit Lichtschranken könnte es klappen, wenn man verschiedenes beachtet. Ich denke, so oder so braucht man mehrere Monate bis Jahre unter Anleitung von erfahrenen Kollegen, bis man solche Messungen reproduzierbar durchführen kann. Gruss Harald
Ich baue Maschinen die 1um Wiederholgenauigkeit haben und auch mal nen paar 100nm. Da Brauchst du auf Jedenfall nen Encoder der mindestens 2 mal Höhere auflösung als 1um hat besser 5-10 fach bessere Auflösung. Die meisten Schrittmotoren sind niocht für Microschrittbetrieb ausgelegt, die es sind kosten richtig Geld. Aber Hauptsächlich Entscheidend ist die Regelung, z.B. Kann es zu Resonanzen kommen bei bestimmetn Geschwindigkeiten (von allen Möglichen Bauteilen ausgelöst die in der Regelstrecke oder sonstwo liegen). Schon mal Temperaturausdehnung von Alu oder PVC angekuckt brauchste nur mal in Wikipedia gucken : Alu ca 20um/K bei EINEM METER das sind noch 2um pro °C bei 10cm Länge oder bei nem Halben meter 1um pro 0.1°C. Da musten fast ne Temperaturstabilisierung einbauen. Also man muß ne mege Tricks anwenden zuim Beispiel Wo befestige ich Dden weggeber damit der nicht wegen 0.1°C Temperturäderung mal nen micrometer wegwandert. Also Ne menge Spezialkomponenten (sehr teuer) und viel Try and Error. Selbst für nen ganzes Team Ingenieure. Der Teufel liegt im Detail. Plastik kannste voll vergessen 200um/°C bein nem meter Oh Gott. GlasKeramik ist angesagt. also Richtige Steuerung so 400€ pro Achse richtiger Motor so 200-300€ richtiger Weggeber 600€ richtige mechanik usw. 500€-1000€ usw. Danach viel Gehirnschmalz --> Unbezahlbar Aber nicht entmutigen lassen ;-) schöne Grüße und viel Glück
Man ich muss sagen, Ihr versteht es einem Mut zu machen. Ich merke schon, dass meine Annahmen wohl nicht zu halten sind und die Umsetzung meines Konzepts in Gefahr ist.
Hier will Dir keiner den Mut nehmen, nur haben die Meisten die nötige Erfahrung, auch aus eigenen Misserfolgen. Vielleicht kannst Du uns mal verraten wozu die Positionierung so genau sein muß, bzw. was Du damit positionieren willst. Vielleicht gibt es ja eine einfachere Lösung. Nur für Low-Budget diese Genauigkeit halte ich für illusorisch. Bestückungsautomaten und, soweit mir bekannt, Bondautomaten interessiert die absolute Positon der Baugruppe/des Chips überhaupt nicht, hier nimmt man Referenzpunkte auf der Platine/ dem Chip und wertet das ganze per Kamera und Bildverarbeitung aus. Selbst das Spiel der Mechanik ist hier "egal". Der Automat arbeitet sozusagen "auf Sicht". Ist aber auch nicht billig.
Mich würde hier mal bei allen Leuten die dazu was geschrieben haben interessieren auf welche Weise sie die Genauigkeit ihrer Schrittmotoren/Systeme überprüft haben. Vielleicht hab ich ja auch Unrecht (hab ja auch meistens im Microstepbereich gearbeite und nicht Teil oder Vollschritt) und Microstep ist sicherer als Vollschritt...aber womit habt ihr das im Experiment bewiesen? Interessant ist auch wenn der Haltestrom mal schwankt oder nicht da ist und man sich im Microstep befindet fg. Was Uwe zu den Preisen gesagt hat kann ich aber bestätigen! Trotzdem sollte man den Kopp nich hängen lassen und nichts geht über das Experiment, da kannste lange übers hin und her diskutieren. Kameras haben ja z.T. 4,5 µm Pixel...da kann man mit etwas Physik was drauß machen! Gruß Andi
Moin, @BKone der Stepper bewegt einen Linerarschlitten und auf dem sitzt ein Laser der senkrecht, seitlich eine Linie abstrahlt. Verfahren wird das Teil übrigens im Viertelschritt, kleiner wird nicht besser. Diese Linie wird mit Kameras aufgefangen die auf einer zweiten Lineareinheit am anderen Ende vom Raum verfahren wird und deren Position mit einem Glasmassstab ermittelt wird. Dieses Referenzsystem wurde bzw. wird regelmäßig gegen ein Interferometer abgegelichen und kalibriert. Das Interferometer wird dann seinerseits gegen ein Prüfnormal der PTB geeicht, also voll rückführbar :) Die Genauigkeiten liegen dann so bei 150µm (Stepper), 25µm Referenzsystem 100nm [Interferometer, ohne Klimatisierung), 10nm (ditto, mit Klima) wobei es bei diesem System vielmehr auf die Krümmung der Linearschiene im gesamten Systemverbund ankommt. Nagelt mich nicht bei dem Interferometer fest, ich gebe meine Teile immer nur in Prüffeld und die Jungs machen das. Optisch wäre das übriges nicht weiter wild, aber die Technik ist kein Selbstgänger und nicht für lau zu haben. Ausserdem wünsche ich jetzt schon viel Spass bei der Montage, wenn die nicht wie ein Lämmerschwanz wackeln soll. -- SJ
Angehängte Dateien:
-

aus_Feler_lernen.JPG
350 KB
Wenn die Sache bloß theoretischer Natur sein solltE, würde ich erst mal einen Test machen und dann versuchen die Fehler zu lokalisieren, um sie anschließend mit Statistik herauszurechnen.
Das hört sich interessant an Sven! Der Laser hat doch auch einen gewissen Querschnitt (Durchmesser des Strahls falls nahe Kreisform), mittelst du da bei der Kamera? Weißt du wie groß bei der Kamera die Pixel sind? Dann ist die Linearführung aber auch das wofür du den Motor einsetzt (ein BLDC- Motor nehm ich mal an). Wenn man jetzt nur den Motor und die Ansteuerung testen will könnte man den Aufbau doch auch anders gestalten, also Laser aber nicht einen Linearen Verfahrweg....da gibs doch noch andere Möglichkeiten einen möglichst kleinen Verfahrweg darzustellen... Simpson's: Ich bin so kluuuuuk, K_L_U_K! bzw. Das Wort heißt NUCULAR, NUCUUUULAAARRR! gruß Andi
BKone schrieb: > Unfug!! > > Vollschritte sind viel sicherer mit den Spulen einstellbar, wenn man > sich überlegt diesen dann noch in 32 Microsteps aufzuteilen erfordert > das ein sehr gutes Handling der Spulen. Ist doch klar das man eher einen > der kleinen Steps verliert als einen Vollschritt. > Das ist hier ja nicht das Glücksrad wo wir mal eben den Motor drehen und > er bleibt auf einen der Felder stehen, hier gibt es kein Raster in das > man locker einpendelt. Hast du überhaupt schonmal mit einem Schrittmotor gearbeitet? Selbstverständlich kann auch ein Motor im Mikroschritt einen Schritt verlieren (durch mechanische Reibung, beispielsweise). ABER: Beim nächsten erfolgreichen Schritt werden die verlorenen Schritte nachgeholt. Im Endeffekt ist eine Mikroschrittsteuerung wesentlich unanfälliger gegen wirkliche Schrittverluste. Wenn hingegen beim Vollschritt ein Schritt verloren geht, dann ist er verloren. Also vielleicht erstmal informieren, bevor man groß "Unfug!!" mit zwei Ausrufezeichen schreibt.
Hallo Michael! Entweder geht ein Schritt verloren oder eben nicht. Die Gefahr eines Schrittverlustes durch Überlast ist mit Mikroschrittbetrieb nicht kleiner als bei Vollschritt. Anders sieht es natürlich mit Resonanzeffekten aus. Was du meinst ist kein "Verlust" von Mikroschritten, sondern der dynamische Lastwinkel, also die Verschiebung zwischen Rotor und elektrischem Feld. Die tritt aber im Vollschritt genauso auf. Ich habe gerade heute Nachmittag was dazu geschrieben: http://www.schrittmotor-blog.de/?tag=lastwinkel Mit freundlichen Grüßen Thorsten Ostermann
Thorsten Ostermann schrieb: > Entweder geht ein Schritt verloren oder eben nicht. Die Gefahr eines > Schrittverlustes durch Überlast ist mit Mikroschrittbetrieb nicht > kleiner als bei Vollschritt. Anders sieht es natürlich mit > Resonanzeffekten aus. > > Was du meinst ist kein "Verlust" von Mikroschritten, sondern der > dynamische Lastwinkel, also die Verschiebung zwischen Rotor und > elektrischem Feld. Die tritt aber im Vollschritt genauso auf. Ich habe > gerade heute Nachmittag was dazu geschrieben: Ok, dann sind wir uns ja einig. Ich hab eigentlich genau das Gleiche geschrieben. ;) Und da Resonanzeffekte in der Praxis eine große Bedeutung haben, ist man mit Mikroschritten im Vorteil. So einfach ist das.
Moin, @BKone Die Kameras sind vollständig spezifiziert und die Mechanik ist sehr genau vermessen, stimmt schon. Ein Laser hat grundsätzlich ein Gaussprofil das man dann Fittet (wie heißt das eigentlich auf Deutsch?) Damit kann man dann die Strahllage Subpixel genau bestimmen. Das Referenzsystem verwendet auch einen Stepper, allerdings wird der zum Servo vergewaltigt. Klappt hervorragend, wenn auch etwas langsam. Allerdings nicht mit einem Drehgeber sondern dem linearen Glasmassstab als Feedback => damit gibt es keine Ungewissheit mehr was Schlupf und sonstige Nettigkeiten in der Mechanik betrifft. Ohne die Umsetzung in die lineare Bewegung müßte man sich wohl was einfallen lassen um eine volle Umdrehung anzubilden... habe ich Momentan auch keine Idee. Eine andere Gruppe hier in der Firma hat da was gemacht, Ablenkung mit einem kleinen Servomotor anstatt der "üblichen" Galvos, bin aber momentan nicht im Bilde wie die das verifiziert haben. Der Servo im Testsystem ist dabei fast egal, vermessen wird die Geradheit der Linearführung. Auf 4m Entfernung darf das ganze System nur um 100µm "torkeln", den Einfluß des Motors bekommt man dann durch zwei Messungen in verschieden Entfernungen raus. Bei einer Breite des Wagens von ca. 8cm und DEM Hebel kommen da schon nette Anforderungen an die Montage zusammen. Und das sind noch nicht mal die präzisen Schienen, nur präzise Montagen. -- SJ
Moin, nebenbei fällt mir da noch was für den Threadstarter ein. Wenn es nur um einen Nullpunkt geht könnte man sich da etwas mit einem Laser und Präzisionsspiegeln vorstellen. - Der Laser strahlt senkrecht auf die Bewegungsrichung. Montage muss ortsstabil sein und wenn möglich mit konstanter Temperatur. Ok, bei Dioden nicht ganz so wichtig. - Präzi Spiegel wird an der Platte befestigt, die Normale ca >45° in Bewegungsrichtung vom Laser weg geneigt. - Zweiter Spiegel platt auf der Platte um den Strahl wieder von der Ebenen weg zu bekommen. - Das Bild wird mittels Kamera eingefangen. Muss nicht einmal besonders gut Fokussiert sein. - Mehrere Bilder mitteln, Gauss-Fit drüber => Nulllage als bekannt festlegen. - Verschiebt sich die Platte wird der Spot überproportional wandern => damit sollte man auf eine Reproduzierbareit von 1µm kommen, ohne das jetzt genauer zu rechnen. Zumindest für den Nullpunkt und ausgewählte Referenzpunkte. Keine Ahnung ob das klappt, bei beschränktem Budget würde ich es aber mal versuchen. Gehen 50€ für Vorderflächenspiegel drauf, als Kamera reicht eigentlich ne Webcam ohne Objektiv und als Strahlquelle ein geschlachteter roter Laserpointer mit Kollimator oder besser einer einfachen Sammellinse. Wenn proof-of-concept steht kann man sich ja mal um richtige Komponenten kümmern. Sollte das funktionieren sind hier aber Bilder fällig! -- SJ
Also so was dummes habe ich schon lange nicht gehört. Einen Nullpunk zu ermitteln indem man bis zum Anschlag fährt. Das ist ungefähr das gleiche wenn man beim Einparken so lange fährt bis die Stossstange ab der Wand ist und die Räder durchdrehen. Nimm eine Gabellichtschranke http://www.pollin.de/shop/dt/NTI0OTc4OTk-/Bauelemente_Bauteile/Aktive_Bauelemente/Optoelektronik/Gabellichtschranke_TCYS5201.html. Kostet 25 Cent und ist bis auf 0,02 mm reproduzierbar.
Natürlich ist das nicht das schönste irgendwo auf Anschlag zu fahren. Aber 20 Mikrometer Reproduzierbarkeit ist nen Spiel mit dem Feuer. Ich hab die erwartung, dass eine elastische Verformung in der Mechanik konstanter ist als diese Lichtschranke. Ich würd euch gerne Bilder zeigen damit ihr besser versteht wo das Problem mit dem Bauraum liegt, aber das ist mir leider nicht erlaubt. Für ne Lichtschranke die 1 Mikrometer Wiederholbarkeit hat und 25 Cent kostet würd ich da alles freiräumen und die Anschrauben, aber die hab ich leider noch nicht gefunden.
Hiran schrieb: > Natürlich ist das nicht das schönste irgendwo auf Anschlag zu fahren. > Aber 20 Mikrometer Reproduzierbarkeit ist nen Spiel mit dem Feuer. > Ich hab die erwartung, dass eine elastische Verformung in der Mechanik > konstanter ist als diese Lichtschranke. Wenn die 2/100 stimmen, dann sicherlich - das erscheint mir aber sehr viel. Wir haben auch schon ganz einfache Lichtschranken eingesetzt, sind aber wesentlich genauer gewesen. Die Reproduzierbarkeit lag bei deutlich unter 0,002mm (mehr war nicht notwendig) - und zwar über Jahre. Es ist weniger die Lichtschranke als der dahinter stehende Verstärker. Mit sauberen Spannungen und guten OpAmps sollte 1µ kein Problem sein. Chris D. Edit: die Lichtschranke war übrigens recht einfach aufgebaut: Aluklötzchen von 20x20x10mm, dann eine 6mm-Sackbohrung von einer Schmalseite und quer durch diese hindurch eine 3mm Bohrung. In die 3mm-Bohrungen kamen dann je die Sende- und Empfangsdiode und der Schlitten hatte einen 5,9mm-Bolzen, der das Klötzchen entsprechend penetrierte ;-) Der Bolzen war vorne auf 5mm Länge auf 2mm abgedreht, so dass der verminderte Lichteinfall schon 5mm vorher bemerkbar war. Das diente dazu, die Verzögerungsrampe frühzeitig einzuleiten und dann exakt bei Verdunkelung anzuhalten.
20µm schafft man auch mit einem guten mechanischen Schalter. Ich habe für einen Kunden eine Steuerung entwickelt, bei der erst auf einen Schalter referenziert wird und anschließend noch zur nächsten Indexmarke am Encoder weitergefahren wird. Der Encoder alleine würde ja keine abolute Lagemessung ermöglichen. Selbst wenn man den letzten Schritt, also das Referenzieren auf die Indexmarke am Encoder, weglässt, waren mit einer einfachen Messuhr keine Abweichungen feststellbar. Die Messuhr hat eine Skalenteilung von 1/100. Selbst wenn man unterstellt, dass die Genauigkeit noch etwas darunter liegt, werden 2/100 mit dem mechanischen Schalter erreicht. Mit freundlichen Grüßen Thorsten Ostermann
Du kannst auch schnell in die Lichtschranke hinein fahren und dann langsam wieder raus. Wenn die Lichtschranke dann wieder frei ist, hast du deinen Nullpunkt.
> Natürlich ist das nicht das schönste irgendwo auf Anschlag zu fahren.
Das nützt doch überhaupt nichts.
Ein Schrittmotor hat Schritte die mehr als 1 um ausmachen werden, nehmen
wir mal 10um an.
Wo ist denn dann der Anschlag, selbst wenn er auf 1 um exakt wäre ?
Doch nicht genau bei Beginn eines Schritts.
Sondern irgendwo während des Schritts kommt die Begrenzung.
Und was passiert dann ?
Wenn man dann vom Anschlag 1 Schritt zurück geht, ist man doch nicht 10
um vom Anschlag entfernt, sondern irgendwas von 0.1 um bis 10 um. Damit
ist doch jeder Versuch der Genauigkeit schon für den Arsch.
Wenn man sowieso Längenmessung hat, die die benötigte Genauigkeit
interpolieren lässt, z.B. einen Glasmasstab dessen Strichabstand 20um
beträgt, der aber auf 1um interpoliert wird, dann kann man auch eine
z.B. mit 10um eher ungenaue Lichtschranke, Endtaster, etc. nutzen, wenn
man in der Lage ist, mit dem Maßstab besser als die
Endschalterungenauigkeit aufzulösen:
Man fährt, bis der Endschalter Signal gibt, und fährt dann weiter, bis
auch der Maßstab einen Nullpunkt der aktuellen Lage signalisiert.
1 Schritt ist 1,3 Mikrometer Aber durch den Mikroschritt habe ich später ja eine Auflösung von ~23 Mikroschritten pro Mikrometer verfahrweg. Wenn ich auf Anschlag fahre und der Motor stoppt weil er nicht mehr weiter kann bleibt er doch bei irgendeiner anzahl mirkoschritten stehen. Selbst wenn ich 5 Mikroschritte verliere ist das im nm Bereich.
Hiran schrieb: > 1 Schritt ist 1,3 Mikrometer > > Aber durch den Mikroschritt habe ich später ja eine Auflösung von ~23 > Mikroschritten pro Mikrometer verfahrweg. Wenn ich auf Anschlag fahre > und der Motor stoppt weil er nicht mehr weiter kann bleibt er doch bei > irgendeiner anzahl mirkoschritten stehen. Selbst wenn ich 5 > Mikroschritte verliere ist das im nm Bereich. Bist du dir überhaupt bewusst was ein Mikrometer ist? Ich meine jetzt nicht theoretisch, sondern in der Praxis. Hast du schonmal versucht einem Mikrometer zu messen? Das ist nicht so einfach wie es sich anhört. Da spielen Sachen wie Temperaturen eine wesentliche Rolle. Und selbst wenn dein Messgerät den Mikrometer anzeigt, heißt das noch lange nicht, dass du ihn auch gemessen hast. Fahr deine Maschine ein paar mal hin und her. Du wirst schon alleine durch die Temperaturänderung (Reibung) ein anderes Referenzergebnis im Mikrometerbereich bekommen. Rechne es aus. Dazu kommen dann noch die ganzen anderen Faktoren wie Schmutz und Ungenauigkeiten in der Anschlagerkennung. Eine Anschlagerkennung über Motorstrom im Nanometerbereich ist in der Praxis IMO völlig Utopisch.
> Aber durch den Mikroschritt habe ich später ja eine Auflösung von ~23 > Mikroschritten pro Mikrometer verfahrweg. Wenn ich auf Anschlag fahre > und der Motor stoppt weil er nicht mehr weiter kann bleibt er doch bei > irgendeiner anzahl mirkoschritten stehen. Nein. Du weisst ja nicht wann er stehen bleibt. Du fährst ja einfach lange genug, und weisst, daß der Motor es nicht schafft, das Objekt über dne Anschlag zu schieben. Dann hörtst du bei einem ganzen Schritt (wo auch sonst) auf Impulse zu geben und glaubst, das Objekt wäre am Anschlag. Dann fährst du z.B. 10 Schritte um bei 13um anzukommen. Davon sind aber die ersten 0 bis 22 Schritte für den Arsch, weil der Motor nicht bei einem Vollschritt vom Anschlag aufgehalten wurde, sondern z.B. 8 Mikroschritte vorher. Diese 8 Mikroschritt zurück bewegen erst mal gar nichts, es verringert nur den Druck auf den ANnschlag. Erst dann bewegt sich das Objekt. Du hast also schon .451um verloren und weisst es nicht mal. Dir fehlen viele Grundlagen bei so kleinen Distanzen, wie erwähnt schon Rost ist dicker. Lerne also erst mal Grundlagen, bevor du dich an so ein Projekt wagst.
Einfach bauen und WUNDERN !!! Irgendwie muß man ja anfangen Viel Spaß und Poste ab und zu mal deine Erkenntnisse ;)
Wenn ich mich recht erinnere, gab es mal vor vielen Jahren eine Untersuchung ueber die Anwendung von Hallsensoren zur Referenz. Dort wurden solche Genauigkeiten erreicht. Wenn mich nicht alles taeuscht, war das mal in der rfe (DDR). Gibt es zu der irgendwo ein Inhaltsverzeichnis im Internet? citb
@citb: Hallgenerator und magnetische Umgebung kann auch in die Hose gehen. Bevor Hian keine neuen Erfolge bei der Realisierung meldet, brauchen wir Ihn ja nicht mit Ratschlägen zu überschütten.
Was damals die Randbedingungen waren, weiss ich nicht mehr. Aber Du hast natuerlich Recht, jeder Einsatz von irgendwelchen Sensoren sollte die Umgebungsbedingungen beachten. citb
Gute Idee. Nochmehr Bad-Vibrations halt ich nicht aus ;) Sobald die Teile da sind und ich erste Versuche machen konnte melde ich mich gerne zurück.
als µ-genauer Referenzschalter eignet sich der MyCom der Fa. Baumer!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.