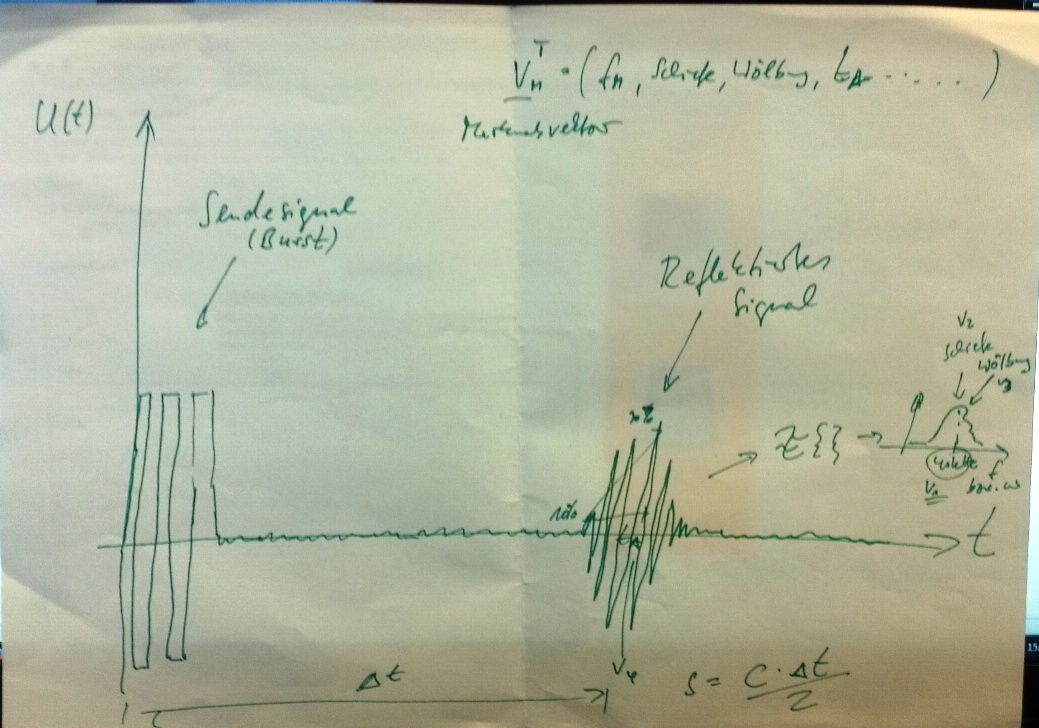
Hallo Freunde! Ich suche verzweifelt im Internet, finde aber nichts, daher habe ich mal eine theoretische Frage an euch. Welche Merkmalsvektoren (Schiefe, Wölbung, etc) bei der Klassifikation von einem Ultraschall reflektierten Signals bzw. der daraus folgenden Gaußschen Glockenkurve kann man noch entnehmen und wie macht man das am besten? Ich habe mal ein Bild (Skizze) beigefügt, dass vielleicht darstellen kann, was ich genau meine. Danke schonmal im Voraus, ich bin für jeden Hinweis und Tipp sehr dankbar. Gruß, Tobo
Angehängte Dateien:
-

Graph_US.jpg
250 KB
Da fällt mir als erstes die Relativgeschwindigkeit durch die Dopplerverschiebung ein. weil's gerade so schön passt. Hier kannst du dir mal ansehen, was Radioastronomen mit einem Radarecho an einem Asteroiden so alles anstellen http://www.planetary.org/blog/article/00002462/ Ob das mit Ultraschall auch geht, ist natürlich eine andere Frage (Wellenlänge), aber darüber nachdenken könnte man ja mal.
In der zerstörungsfreien Materialprüfung schickt man keinen Burst sondern einen einzelnen Puls, sozusagen ein Schlag mit dem Hammer. Das Echosignal wird in der regel DC-Offset korregiert und durch einen digitalen Filter geschickt. Die auswertung erfolgt mittel sogenannter Gates, also z.B. das überschreiten eine bestimmten Amplitude. Nix mit Schiefe, Wölbung etc.. Liegt wohl an verwendeten eltromechanischen Wandler, dem Piezo. Der schwingt wohl nicht wie ein HF Oszillator, ist halt mechanik. Das klassische Uöltraschalprüfbuch stammt vom Krautkrämer und ist IMHO nur antiquarisch und teuer zu erstehen. Google spuckt mit dem suchstring "NDT phased array" noch ein paar passende sachen aus. Aber vielleicht habe ich dich falsch verstanden. Grüße
Tobo schrieb: > Welche Merkmalsvektoren (Schiefe, Wölbung, etc) bei der Klassifikation > von einem Ultraschall reflektierten Signals bzw. der daraus folgenden > Gaußschen Glockenkurve kann man noch entnehmen und wie macht man das am > besten? Neben der Einhüllenden noch die Nulldurchgänge und somit die Laufzeit der Signale. Erst mit der Erkennung der Nulldurchgänge in Relation zu einem schnellen Takt der Zähler kann man die Auflösung erhöhen. Soweit zu deinem Verfahren -> TOF -> Time of Flight. Es gibt aber noch andere Verfahren, wie Frequenzsweeps = FMCW, stehende Welle zwischen Sender und Empfänger und Auswertung der Phasendifferenzen, Korrelationen mit kodierten Signalen zB. MLS Kodierungen. Einige dieser Verfahren sind systembedingt für die benutzten US Transducer nicht so einfach anwendbar weil diese Transducer extrem schmallbandig sind. Man kann sie also nicht frequenzkodiert ansteuern. In deinem Fall benötigst du einen Matched Filter den du auf die zu empfangenden Signale einstellen musst. Der Matched Filter gibt dir die Antwort welcher der in parallel gesampelten Nulldurchgänge der 0-Index darstellt. Von diesem Nulldurchgangs-Zeitstempel geht man dann eine gewisse Anzahl der vorherigen/nachfolgenden Nulldurchgänge durch, summiert sie und macht eine Mittelwertberechnung um den gewählten 0-Index zu korrigieren. Der Zeitstempel dieses Nulldurchganges ist dann die TOF. Gruß hagen
Danke erstmal für die schnellen Antworten. Ich versuch nochmal mein Vorhaben detaillierter zu erklären: also ich hab ein Ultraschallmessgerät, das sich wie in der Skizze dargestellt verhält. Es geht darum bestimmte Objekte zu messen. Anschließend werden die Messwerte durch eine Fourier-Transformation in eine "Form" gebracht, die als Input Neuronen für ein Neuronales Netz dienen soll. Das Neuronale Netz soll dann erkennen, um welches Objekt es sich dabei handelt (was aber jetzt nichts mit der Fragestellung zu tun hat). Die Problematik dabei ist, dass man diverse Merkmale braucht, um die Objekte zu unterscheiden. Das reflektierte Signal sieht natürlich je nach Objekt anders aus. Es werden sicherlich auch Körper dabei sein, die nur unsinnswerte bringen - Dank dem Dopplereffekt ;) Ich versuche also anhand der Merkmalsvektoren genug Inputwerte zu sammeln. Ein Merkmalsvektor z.B. ist die Zeit, die das Signal vom Sender zum Objekt und zurück zum Sender (Empfänger) braucht. Also wie in der Skizze dargestellt "delta t", wobei die daraus resultierende Entfernung jetzt zum Erkennen keine all zu große Rolle spielt. Ich hoffe, das hilft meine Frage klarer zu machen.
>Es werden sicherlich auch Körper dabei sein, die >nur unsinnswerte bringen - Dank dem Dopplereffekt ;) Bitte erläutern, doppler-effekt tritt doch erst bei einer relativgeschwindigkeit ungleich 0 zwischen beobachter und Sender auf. Beschallst du bewegende Objekte? Bewegt sich der Wandler? was sind für Dich Unsinnswerte. Benutzt Du einen ein-elementigen oder mehrelementigen US-Kopf? Grüße,
Tobo schrieb: > Die Problematik dabei ist, dass man diverse Merkmale braucht, um die > Objekte zu unterscheiden. Das reflektierte Signal sieht natürlich je > nach Objekt anders aus. Es werden sicherlich auch Körper dabei sein, die > nur unsinnswerte bringen - Dank dem Dopplereffekt ;) > > Ich versuche also anhand der Merkmalsvektoren genug Inputwerte zu > sammeln. > Darf ich deine Frage umformulieren? "Welche Informationen soll ich aus dem reflektieren Signal vorextrahieren, um diese dann dem neuronalen Netz zum Frass vorzuwerfen?" Mittenfrequenz Bandbreite Pulsbreitenverhältnis Originalpuls/empfangener Puls Klassifizierung der Hüllkurve des empfangenen Pulses etc.
Sorry, das bezog sich auf die Anwendung... Das ganze soll irgendwann noch in ein Fahrzeug integriert werden (daher Dopplereffekt). Mein Fehler, das hätte ich erwähnen sollen :-) Mit unsinnigen Werten meine ich einfach, dass es sicherlich auch Merkmale gibt, mit denen das Neuronale Netz nichts anzufangen weiß, bzw, die sich bei allen Objekten gleich / ähnlich verhalten werden. Ich muss einfach erstmal viele möglichen Merkmale sammeln und kennenlernen und dann auf Tauglichkeit prüfen. Am Anfang wird das reine Laborarbeit, wo sich keine Objekte bewegen, dennoch will ich die Anwendung vorher schon berücksichtigen. Gruß
Hast du dir mal das Ultraschallempfangssignal für verschiedene Objekte auf dem Oszi angeschaut und versucht, mit Auge und Gehirn Unterschiede zu erkennen? Wenn ja, wirst du festgestellt haben, dass das gar nicht leicht ist. So liefern bspw. beliebige konvexe Körper alle qualitativ das gleichen Signale. Sie unterscheiden sich lediglich in der zeitlichen Verschiebung (abhängig vom Messabstand) und einem Amplitudenfaktor (abhängig vom Messabstand, der seitlichen Verschiebung des Objekts, der für die Refle- xion wirksame Fläche und dem materialabhängigen Reflexionsgrad der Ober- fläche des Objekts). So liefern also für eine kleine, dem Sensor zuge- wandte Platte, einen größerer Zylinder und eine noch größere Kugel — im gleichen Abstand aufgestellt — praktisch genau das gleiche Empfangssig- nal, nicht nur qualitativ, sondern auch quantitativ. Da kann die beste KI keine Klassifizierung vornehmen. Anders sieht es bei nichtkonvexen Objekten aus. Bspw. liefert ein vier- beiniger Stuhl vier, teilweise relativ weit auseinanderliegende Echos, die sich im Empfangssignal überlagern und zu mehreren Maxima in der Hüllkurve führen. Aber auch hier lassen sich beliebig viele andere Ob- jekte finden, die aus Sicht des Ultraschallsensors genau gleich ausse- hen. Falls du Piezoschallwandler einsetzt, hast du zusätzlich das Problem der hohen Güte, die den Wandler nur langsam ein und ausschwingen lässt. Das führt zu einer Verwischung der objektspezifischen Information. In der Fouriertranformierten wirst du im Wesentlichen einen schmalen Peak bei der Resonanzfrequenz sehen, der Rest wird größtenteils um Rauschen un- tergehen. Mit breitbandigen Wandlern (bspw. Audiohochtönern) wirst du diesbezüg- lich bessere Ergebnisse erhalten, allerdings auf Kosten der Sendereffi- zienz und der Empfängerempfindlichkeit. Aber schau dir einfach mal ein paar Signale für unterschiedliche Objekte im Zeit- und Frequenzbereich an, um ein Gefühl für das Verhalten der Ultraschallmessung zu bekommen. Erst wenn du selbst reproduzierbare Unterscheidungsmerkmale in den Signalen entdecken kannst, lohnt es sich, die Klassifizierung mit neuronalen Netzen u.ä. anzugehen.
Ich gebe Yalu recht, das wird mit Ultraschall in der Form nichts werden. 1.) du musst breitbandge US Transducer benutzen, meistens ~ 3MHz Mittenfrequenz mit 1MHz Bandbreite, führt zu geringer Reichweite des Systemes 2.) du musst ein "Imaging" betreiben indem du entweder ein Beamforming durchführst (nur ein Empfangs"auge" nötig, dafür auf Senderseite mit mehreren Tansducern den Schall fokusieren) oder ein Sender und mehrere Empfänger als Array mit gemeinsammen Fokuspunkt. Letzendlich läuft es darauf hinaus das Objekt zu gezielt beschallen und dessen Reflektionen an unterschiedlichen örtlichen Positionen zu messen und deie Laufzeitunterschiede zwischen diesen Signalen werden ausgewerten als "Oberflächenmuster" des Objektes. Am Anfang würde ich dir ja empfehlen mit optischen Systemen zu beginnen, sprich einer WEB Cam. Die liefert dir mehr Informationen für dein Neuronales Netzwerk. Und alleine schon das NN wäre ein separates Projekt für sich das es in sich haben wird. Was ich mich frage ist was ihr mit der FFT vorhabt. Für Mustererkennung habe ich die nie benötigt bei meinen NNs. Mit welchem Netzwerktyp wollt ihr arbeiten ? Gruß Hagen
Tobo schrieb: > Es geht darum bestimmte Objekte zu messen. Was für Objekte, welche Eigenschaften dieser welcher Abstand zum Schwinger und in welchem Medium? > Anschließend werden die > Messwerte durch eine Fourier-Transformation in eine "Form" gebracht, die > als Input Neuronen für ein Neuronales Netz dienen soll. IMHO kommst du da mit deinem Wandler nicht sehr weit. Die Information z.B. welche Form das Objekt hat ist in deinem Signal nicht vorhanden. Es werden lediglich Reflexionen empfangen die aber durch Überlagerung schon bei 1mm Abstandsänderung ganz anders aussehen. Ausnahme zb. in der Sonografie und dem maritimen Survey , wo aber reflektierende Grenzschichten gemessen werden. Mit einem Mehrfrequenz Phase Array ist es evtl. machbar, aber z.B in Luft nur auf kurzer Distanz.
Hagen Re schrieb: > Was ich mich frage ist was ihr mit der FFT vorhabt. Frage ich mich auch. Wenn er nur ein Frequenz sendet kommen nicht allzu viele verschiedene zurück.
Tobo schrieb: > Es geht darum bestimmte Objekte zu messen. Anschließend werden die > Messwerte durch eine Fourier-Transformation in eine "Form" gebracht, die > als Input Neuronen für ein Neuronales Netz dienen soll. Das Neuronale > Netz soll dann erkennen, um welches Objekt es sich dabei handelt (was > aber jetzt nichts mit der Fragestellung zu tun hat). Hallo Tobo, mir war nicht klar das Du Ultraschall in Luft verwendest, dabei hat man mehr Freiheitsgrade in der Sendeburstgestaltung im Vergleich zu Ultraschall in Stahl. Abhängig von was dein NN erkennen soll musst du es mit Input versorgen. Gradso wie bei menschlichen Gehirn: es gibt bereiche die optische Reize auswerten (sehfeld) und Bereiche die akustische Signale analysieren. Falls Du anhand Form und Lage Objekte klassifizieren willst, dann musst du die Lage dem NN präsentieren, bspw als Grauwertbild, bei dem der Grauwert für den Abstand zu Empfänger steht. Mit diesem könnte dann das NN trainiert werden, nahe Verkehrsschilder von fernen Werbetafeln zu unterscheiden. Ganz zweckfrei ist dein Ansatz, das NN mit Charakteristika des Echos zu füttern allerdings nicht, da widerspreche ich meinen Vorredern. Es könnte akustische Eigenschaften des reflektors erkennen und damit ein Objekt aus dünnem Blech (schwingfähig, Verkehrsschild) von einen Objekt aus massiven Beton (Poller, zu schwer zum Mitschwingen) unterscheidbar machen. Das natürliche Vorbild ist dort genauer beschrieben: http://en.wikipedia.org/wiki/Animal_echolocation Soll mit der FFT der "filterbank receiver" nachgestellt werden? "Today most - but not all - researchers believe that they use cross-correlation, but in an incoherent form, termed a filter bank receiver."? Gruß,
Habt ihr euch schon für eine Netztopologie entschieden? Ohne von Luftultraschall Ahnung zu haben, würde ich tippen, daß ein demoduliertes Signal nicht so extrem wertvoll ist und eher mit dem hf Signal etwas gemacht werden kann. Messlatte ist ja sicher ein Kollege wie die Fledermaus. Die stehen aber nicht ruhig in der Luft sondern fliegen nicht geradlinig durch die Gegend, sprich die beschallen die Objekte von leicht unterschiedlichen Richtungen. Sicher eine Rahmenbedingung bei der 'Bildgebung' Interessantes Thema
Hallo Freunde, erstmal wieder danke für die viele Resonanz. Jeder Beitrag hilft mir ungemein. Das Projekt ist Thema meiner Diplomarbeit, daher komm ich nicht dran vorbei und muss ich mich dieser Aufgabe stellen. Ein US Messgerät ist vorgegeben, an der Hardware kann ich also nichts ändern, werde aber das Gerät nochmal genauer unter die Lupe nehmen müssen. Auf eure offenen Fragen komme ich nochmal zurück, wenn ich näheres weiß. Ich werde sicherlich weiterhin hier aktiv sein und würde mich über jedes Feedback von eurer Seite freuen. Danke und Gruß, Tobo Jo
Hi, Uli, ( Ultraschall schrieb:) > Ganz zweckfrei ist dein Ansatz, das NN mit Charakteristika des Echos zu > füttern allerdings nicht, da widerspreche ich meinen Vorredern. Es > könnte akustische Eigenschaften des reflektors erkennen und damit ein > Objekt aus dünnem Blech (schwingfähig, Verkehrsschild) von einen Objekt > aus massiven Beton (Poller, zu schwer zum Mitschwingen) unterscheidbar > machen. > > > Das natürliche Vorbild ist dort genauer beschrieben: > http://en.wikipedia.org/wiki/Animal_echolocation Interessanter Artikel. Die Aussage "neural network" ist allerdings genauso unbrauchbar wie die Aussage "Zauberstab". Wenn, dann will ich wissen "wie funktioniert das?" Wenn ich so analytisch denke, dann stelle ich mir eine Kreuzkorrelation vor zwischen Sende- und Empfangssignal. Jede streuende Fläche, jede streuende Kante müsste darin eine Spitze erzeugen. Die zeitliche Verteilung dieser Spitzen gibt Auskunft über die relative Lage des Objekts in Bezug auf Sender und Empfänger. Eine ähnliche Aufgabe haben ja die Radarleute, die erkennen wollen, ob sie da einen Stealth-Bomber vor sich haben oder eine Drohne mit einem Winkelreflektor. Ciao Wolfgang Horn
Wolfgang Horn schrieb: > Wenn ich so analytisch denke, dann stelle ich mir eine Kreuzkorrelation > vor zwischen Sende- und Empfangssignal. > Jede streuende Fläche, jede streuende Kante müsste darin eine Spitze > erzeugen. > > Die zeitliche Verteilung dieser Spitzen gibt Auskunft über die relative > Lage des Objekts in Bezug auf Sender und Empfänger. Darauf bezog ich mich mit: >Es gibt aber noch andere Verfahren, wie Frequenzsweeps = FMCW, stehende >Welle zwischen Sender und Empfänger und Auswertung der >Phasendifferenzen, Korrelationen mit kodierten Signalen zB. MLS >Kodierungen. Aber all diese Verfahren bedingen für eine Objekterkennung das sie - mit breitbandigen Signalen arbeiten - die heute üblichen US Transducer nicht nutzbar sind - Arrays von Sendern/Empfänger benutzen oder der Sensorkopf muß sich in Relation zum Objekt für das System deterministisch bewegen Das was man dann am Häufigsten auswertet sind - örtliche Phasendifferenzen der empfangen Signale - Hüllkurve die aber fast nichts aussagt ausser da hat was im Abstand X reflektiert das mit Y db Z % der Energie geschluckt hat. - Dopplereffekte In jedem Fall wird sowas mit einem einfachen 40kHz Piezo Transducer nicht gehen. Ich selber hatte versucht durch Detuning solcher Transducer die Bandbreite auf 5kHz zu erhöhen um MLS kodierte Signale absetzen zu können. Grundsätzlich ging das aber die Güte der Piezos ist einfach viel zu hoch für bischen breitbandigere Signale als der reine Sinus der Resonanzfrequenz der Transducer. Ein Imaging ging mit diesem System nicht, nur die exaktere CW-TOF Bestimmung war damit möglich, auf 30cm Distanz da es bei dem Projekt um ein Anemometer ging. Das einzig auswertbare Merkmal dieses Aufbaus war also die Laufzeit der Signale durch das Medium Luft. Davon mal abgesehen entsteht noch ein weiteres viel wichtigers Problem. Neuronale Netzwerke sind ja schön und gut. Wenn ich eines mit den Dingern gelernt habe dann ist es: die Daten mit denen man es füttert müssen sehr gut aufbereitet sein. Dh. der Glaube man nehme ein NN und es wird schon selber lernen was wir brauchen, ist falsch. Es ist eher genau umgekehrt: kann der Mensch die gesuchten Muster eindeutig erkennen dann kann man auch ein NN damit trainieren. (ja es gibt Erfolge die das Gegenteilige vermuten lassen würden). Gerade diese Preprozessing der Daten ist sehr wichtig damit das NN überhaupt was lernen kann. Gruß Hagen
Hi, Hagen, >>Es gibt aber noch andere Verfahren, wie Frequenzsweeps = FMCW, stehende >>Welle zwischen Sender und Empfänger und Auswertung der >>Phasendifferenzen, Korrelationen mit kodierten Signalen zB. MLS >>Kodierungen. > > Aber all diese Verfahren bedingen für eine Objekterkennung das sie > > - mit breitbandigen Signalen arbeiten Ja. > - die heute üblichen US Transducer nicht nutzbar sind Kommt drauf an. Ich habe in meiner Bastelkiste Ultraschallwander von Polaroid. Elektrostaten mit 100 kHz Bandbreite. Für Unterwasser gibt's Wandler mit Polydingsbums-Folie. > - Arrays von Sendern/Empfänger benutzen oder der Sensorkopf muß sich in > Relation zum Objekt für das System deterministisch bewegen Wenn Du auch Winkelinformationen haben willst. Angenommen, Du strahlst ein Schiff mit Radar von etwa vorn an. Dann kommt das Echo des Bugs zuerst, der mittigen Brücke, und dann erst vom Heckaufbau. Willst Du wissen, ob die Brücke mittig ist oder seitlich, tja, dann brauchst Du eine waagerechte Apertur, ja. > Das einzig auswertbare Merkmal dieses Aufbaus war also die Laufzeit der > Signale durch das Medium Luft. Mag sein. Merkmalen gegenüber bin ich solange misstrauisch, bis mir jemand zeigt, wie sie funktionieren, wie sie zustande kommen. Beispiel: Die Quersumme von 19 ist 0. Aber die Tatsache, eine "0" als Merkmal empfangen zu haben bedeutet noch lange nicht, dass sie nur von einer 19 stammen konnte. > Davon mal abgesehen entsteht noch ein weiteres viel wichtigers Problem. > Neuronale Netzwerke... Dazu will ich nichts sagen. Neuronale Netzwerke sind analytisch eben nicht zugänglich, als Programmierer bin ich aber oft gefragt worden, die Richtigkeit meines Programms nachweisen zu sollen. Deshalb bevorzuge ich die Analytik, wo das geht. Ciao Wolfgang Horn
Wolfgang Horn schrieb: >> - Arrays von Sendern/Empfänger benutzen oder der Sensorkopf muß sich in >> Relation zum Objekt für das System deterministisch bewegen > Wenn Du auch Winkelinformationen haben willst. > Angenommen, Du strahlst ein Schiff mit Radar von etwa vorn an. Dann > kommt das Echo des Bugs zuerst, der mittigen Brücke, und dann erst vom > Heckaufbau. Einfach ausgedrückt: man sendet ein 40kHz Burst und empfängt diesen auf Grund der unterschiedlichen Reflektionen als ein Frequenzgemisch mit weit höherer Bandbreite als die 40kHz. Und das ist ein Problem wenn man auf Empfängerseite wiederum hochselektive Empfänger wie eine US Piezo Kapsel benutzt. Mit 40kHz US Transducern wird sowas niemals gehen. Deswegen nimmt man normalerweise Phasedarrays die durch ihre örtliche Anordung der verschiedenen Empfänger (oder Sender dann ist es Beamforming) so diese Phaseninformation mit Ortsvektor sampeln können. >> Das einzig auswertbare Merkmal dieses Aufbaus war also die Laufzeit der >> Signale durch das Medium Luft. >Mag sein. Merkmalen gegenüber bin ich solange misstrauisch, bis mir >jemand zeigt, wie sie funktionieren, wie sie zustande kommen. >Beispiel: Die Quersumme von 19 ist 0. Aber die Tatsache, eine "0" als >Merkmal empfangen zu haben bedeutet noch lange nicht, dass sie nur von >einer 19 stammen konnte. >Deshalb bevorzuge ich die Analytik, wo das geht. Da sind wir exakt auf gleicher Wellenlänge ;) und darum dreht sich letzendlich die ganze Diskussion: meine Aussage ist mit Ultraschall Transducern werden viel zu viele Merkmale nicht ausgewertet oder genaugenommen sogar eleminiert. Gruß Hagen
Entscheidend ist doch auch die Menge der zu unterscheidenden Objekte. Wenn die schlau gewählt werden (und das könnte im Rahmen einer Diplomarbeit ja durchaus sein), erhöht das die Möglichkeiten. Also Kugel, Würfel, ... Hagen Re schrieb: > Einfach ausgedrückt: man sendet ein 40kHz Burst und empfängt diesen auf > Grund der unterschiedlichen Reflektionen als ein Frequenzgemisch mit > weit höherer Bandbreite als die 40kHz. Und das ist ein Problem wenn man > auf Empfängerseite wiederum hochselektive Empfänger wie eine US Piezo > Kapsel benutzt. Mit 40kHz US Transducern wird sowas niemals gehen. > Deswegen nimmt man normalerweise Phasedarrays die durch ihre örtliche > Anordung der verschiedenen Empfänger (oder Sender dann ist es > Beamforming) so diese Phaseninformation mit Ortsvektor sampeln können. Das habe ich mir so gar nicht klar gemacht. :-) Macht einem dann u.U. nicht so etwas wie die Dispersion schon einen Strich durch die Rechnung? Ich kann die Aussagen eigentlich nur wiederholen und mich anschließen. Deswegen fragte ich auch, ob schon eine Topologie gewählt wurde, also schon eingermaßen klar ist, mit was für Daten man es zu tun hat. - Das NN Netz muss schon so designed sein, daß es zum Problem passt. Ich hab ein NN, damit erkenne ich biologisch motiviert quasi alles ist ja mehr ein Werbespruch. - Die Chance verwertbare Eigenschaften zu finden sehe ich auch wie gesagt im HF Signal. Daher meine Vermutung daß die Hüllkurve wenig aussagekräftig sein wird. Und die Verwendung von mehr als einem Wandler wurde glaub ich auch nicht ausgeschlossen damit hat man zwar kein phased Array, aber doch eine zusätzliche richtungsabhängige Information. - Gibt es keine hochfrequenteren Luftwandler? Ich glaub eine 40 kHz hat Tobo gar nicht eingeplant oder? Ansonsten wird der eine oder andere Hersteller sicher auch eine Anfertigung für einen stark gedämpften 100 kHz Wandler oder so machen - Diplomarbeiten hängen, hingen früher zumindest, doch an einem Projekttopf. - Als erstes würde ich mir auch Gedanken machen, ob man die Echodaten simulieren kann und über den Weg Charakteristika zu finden. Ins Blaue etwas in ein Netz zu füttern ohne genau zu verstehen was man empfängt ist mutig.
Clemens M. schrieb: > - Gibt es keine hochfrequenteren Luftwandler? Ich glaub eine 40 kHz hat > Tobo gar nicht eingeplant oder? Ansonsten wird der eine oder andere Er sagte das die HW vorgegeben ist und nicht mehr erweiterbar noch austauschbar wäre, so habe ich ihn verstanden. Davon abgesehen hat er keine weiteren Angaben gemacht ausser das es Ultraschall ist und in einem Auto verbaut werden soll. > Hersteller sicher auch eine Anfertigung für einen stark gedämpften 100 > kHz Wandler oder so machen - Diplomarbeiten hängen, hingen früher > zumindest, doch an einem Projekttopf. Ändert denoch nichts an der Sache. Entweder er nimmt hochfrequente und relativ breitbandige Transducer dann hat er noch eine Reichweite im Dezimeterbereich (hohe Auflösung und geringe Reichweite). Oder er nimmt Piezo Wandler dann hat er viel Outputpower aber auf Grund der hohen Güte auf Sender und Empfängerseite kann er erstens kein breitbandiges Signal absenden (Kodierung mit MLS, FMCW usw. fallen flach) und zweitens mit dem Empfänger auch kein breitbandiges Signal empfangen (Phasen/Frequenzinformationen gehen verloren und Amplitudeninformatinen werden verfälscht auf Grund dessen das der Piezo wie ein Quartz in Eigenresonanz schwingt). So aber das ist noch nicht alles: die abgestrahlte Frequenz und die sich daraus ergebende Luftschwingungen sind für die Auflösung im Verhältnis zur Entfernung enorm wichtig. Und da sind 40KHz = 8mm doch schon ziemlich grob aber letzendlich hängt das von den Zielen ab. Hinzu kommt die Luft als komplexes temperaturabhängiges Gasgemisch. Alleine schon der Temperatureinfluß, Wind nicht mit gerechnet, macht aus den 8mm Auflösung schnell das 100 fache. > - Als erstes würde ich mir auch Gedanken machen, ob man die Echodaten > simulieren kann und über den Weg Charakteristika zu finden. Ins Blaue > etwas in ein Netz zu füttern ohne genau zu verstehen was man empfängt > ist mutig. Mutig ? irrsinnig wohl eher da es ausschließlich nur Frust bringen wird, gerade mit NNs. Gruß Hagen
Hi, Clemens, (M. schrieb:) > > - Gibt es keine hochfrequenteren Luftwandler? Natürlich. Willst Du preiswert, kaufst Du in der Bucht eine Polaroid-Kamera mit US-Fokussierung. Die letzte habe ich für 1€50 plus Porto gekauft. Ansonsten - einen Elektrostaten kannst Du mit einer Pertinax-Platte mit Lötstreifenraster basteln, der Folie eines Folienkondensators und einen Abstandhalter. Ciao Wolfgang Horn
Tobo schrieb: > Es geht darum bestimmte Objekte zu messen. Anschließend werden die > Messwerte durch eine Fourier-Transformation in eine "Form" gebracht, die > als Input Neuronen für ein Neuronales Netz dienen soll. Das Neuronale > Netz soll dann erkennen, um welches Objekt es sich dabei handelt (was > aber jetzt nichts mit der Fragestellung zu tun hat). Der Sinn der FFT leuchtet mir nicht ein. Das NN versucht, eine (i.d.R. nichtlineare) Abbildung von Merkmalen auf die Klassifikation möglichst gut nachzubilden. Diese Aussage gilt unabhängig vom verwendeten Typ des NN. Mit der FFT schaltest Du eine zusätzliche (lineare) Abbildung dazu in Reihe. Ohne weitere Vorbehandlung bringt Dir das aber keine Vorteile, weil ein optimal trainiertes und hinreichend großes NN diese zusätzliche Abbildung einfach mitlernen würde. Was bringt Dich zur Annahme, dass der Ausgang der FFT der optimale Merkmalsvektor ist? Yalu hat den Kern des Problems schon sehr gut benannt: wenn Du die gesuchte Abbildung von empfangenem Signal auf Objektklasse nicht von Hand hinbekommst, wird auch Dein NN sie kaum schaffen. Das menschliche Gehirn ist schon ein richtig gutes NN. Für die Erzeugung von Merkmalsvektoren könntest Du eher mal losziehen und die Maximapositionen im Echo suchen. Und dann vielleicht noch die Signalform rund ums Maximum in einen halbwegs sinnvollen Kennwert gießen (um festzustellen, ob Du eher ein monolithisches Objekt wie eine Wand oder ein strukturiertes Objekt wie vier Stuhlbeine vor Dir hast). Ein NN zu trainieren, ist nicht so furchtbar schwer. Hinreichend viele Trainings- und Testdatensätze zu generieren und einen guten Merkmalsvektor zu erzeugen, schon viel eher. Sinnvoll könnte die FFT am ehesten sein, um den Dopplereffekt bei Relativbewegungen zu kompensieren. Ansonsten halte ich den Ansatz mit der FFT für nur eingeschränkt hilfreich. Max
> Yalu hat den Kern des Problems schon sehr gut benannt: wenn Du die > gesuchte Abbildung von empfangenem Signal auf Objektklasse nicht von > Hand hinbekommst, wird auch Dein NN sie kaum schaffen. Das menschliche > Gehirn ist schon ein richtig gutes NN. Richtiger Ansatz, falscher Vorschlag. Klar ist ein natürliches Neuronales Netzwerk ein guter proof of concept für ein künstliches NN. Allerdings würde ich als Proband für die Erkennbarkeit der Umgebung mittels Ultraschall, keinen (sehenden) Menschen bitten. Dessen NN und Signalerfassung/-aufbereitung ist nicht dafür trainiert respektive ausgelegt. Wenn die Fledermaus das kann, dann hat auch ein künstliches NN mit entsprechend vorkonditionierten Daten gute Erfolgsaussichten. Und wenn man durch anatomische und Verhaltungsuntersuchengen meint, das Hören der Fledermaus basiert auf Frequenzanalyse oder Filterbank ähnlichen Verhalten, dann sollte ein nachbau der selben durch elektronisches Signalprocessing ein guter erster Ansatz sein. MfG,
Uli Ultraschall schrieb: > Wenn die Fledermaus das kann, dann hat auch ein künstliches > NN mit entsprechend vorkonditionierten Daten gute Erfolgsaussichten. Und > wenn man durch anatomische und Verhaltungsuntersuchengen meint, das > Hören der Fledermaus basiert auf Frequenzanalyse oder Filterbank > ähnlichen Verhalten, dann sollte ein nachbau der selben durch > elektronisches Signalprocessing ein guter erster Ansatz sein. Korrekt, wenn da nicht das Problem wäre das unsere heutigen Ultraschall Sender und Empfänger an die Leistungsfähigkeiten der Stimme und Ohren der Fledermaus herankommen kann. Und das ist das Problem auf das die meisten Leute hier ständig hinweisen. Nicht weil sie das glauben sondern aus praktischen Erfahrungen heraus mit solchen Systemen. Und meine Erfahrung mit NNs ist das man spätestens wenn ein NN was sinnvolles gelernt hat als Mensch bei der Analyse der Daten ebenfalls Muster erkennen kann. Besser ist es natürlich schon analytisch über die Mathematik im Vorfeld sicherstellen zu können das da überhaupt für ein NN erlernbare Muster vorhanden sind. Und das ist eben das Problem mit den meisten US Transducern, sie lassen solche differenzierten Muster erst garnicht zu. Gruß hagen
Hagen Re schrieb: > Entweder er nimmt hochfrequente und > relativ breitbandige Transducer dann hat er noch eine Reichweite im > Dezimeterbereich (hohe Auflösung und geringe Reichweite). Oder er nimmt > Piezo Wandler dann hat er viel Outputpower aber auf Grund der hohen Güte > auf Sender und Empfängerseite kann er erstens kein breitbandiges Signal > absenden (Kodierung mit MLS, FMCW usw. fallen flach) und zweitens mit > dem Empfänger auch kein breitbandiges Signal empfangen > (Phasen/Frequenzinformationen gehen verloren und Amplitudeninformatinen > werden verfälscht auf Grund dessen das der Piezo wie ein Quartz in > Eigenresonanz schwingt). Ultraschall Transducer aufs Basis kapazitiver MEMS (Mikromechanik) als möglicher Lösungsansatz? Gelten als breitbandiger als die klassischen Piezo-Wandler. MfG,
Uli Ultraschall schrieb: > Ultraschall Transducer aufs Basis kapazitiver MEMS (Mikromechanik) als > möglicher Lösungsansatz? Gelten als breitbandiger als die klassischen > Piezo-Wandler. Er möchte das im Auto installieren, so wie ich ihn verstanden habe, also gehen wir mal von 1-2 Meter Abstand aus. Nun schau dir mal die Reichweite dieser MEMS an. Gruß hagen
Hi hagen, Hagen Re schrieb: > Uli Ultraschall schrieb: >> Ultraschall Transducer aufs Basis kapazitiver MEMS (Mikromechanik) als >> möglicher Lösungsansatz? Gelten als breitbandiger als die klassischen >> Piezo-Wandler. > Er möchte das im Auto installieren, so wie ich ihn verstanden habe, also > gehen wir mal von 1-2 Meter Abstand aus. Nun schau dir mal die > Reichweite dieser MEMS an. Das ist keine Aussage über die Bandbreite dieser Sensoren und damit über die Signalmerkmale die man mit diesen erzeugen resp. aufnehmen kann. Nebenbemerkung: Vielleicht braucht er dies nur als Einparkilfe (typ., wenn nicht einzige US Anwendung im Automobil) zur Unterscheidung Graskante - Bordsteinkante. Da genügen ein paar dm. MfG,
Tobo, wenn Du mit Deinem Gerät Anordnung, Geometrie und Oberflächeneigenschaften der Reflektoren beurteilen willst, dann läuft das auf die Bestimmung der Sprungantwort des Raumes im "Blickfeld" der Sender/Empfängeranordnung hinaus. Das MLS-Verfahren ist dafür ganz gut geeignet. Ich habe so etwas Ähnliches mal versucht und das Ergebnis war eigentlich vielversprechend (siehe Anhang). Du wirst allerdings nicht drum herumkommen, die Sender/Empfängeranordnung zu schwenken und die Sprungantwort auch als Funktion des "Blickwinkels" auszuwerten (google mal nach Tomographie). Ciao, mare_crisium
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.