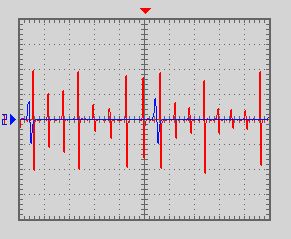
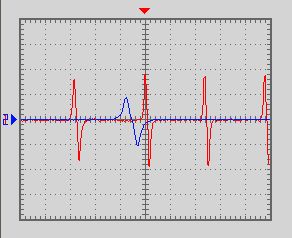
Hallo zusammen, um alte Motoren-Steuergeräte von Magneti Marelli (Typ IAW aus den 80er Jahren) am Schreibtisch prüfen zu können (HiL), benötige ich einen Signalgenerator, der die Signale der beiden Pickups (onduktive Sensoren) erzeugt. Die weiteren Signale (Widerstandswerte entsprechend Drosselklappenwinkel, und Temperaturen/Luftdruck) sind einfach per Poti darstellbar. Für die Ansteuerung dieser Steuergeräte gibt es auf der Schwungscheibe der Kurbelwelle vier "Nasen" im Abstand von 90° zueinander. Damit das Steuergerät weiß, bei welcher Nase der Kolben in einer bestimmten Position (z. B. Oberer Totpunkt - OT) steht und ob es sich um den Zünd-OT oder den Ausstoß-OT handelt, gibt es noch einen zweiten Sensor, der an der Nockenwelle pro Umdrehung einen Impuls gibt. Das Steuergerät sieht also vom KW-Sensor immer acht Impulse, bevor der NW-Sensor einen Impuls abgibt. Zur Verdeutlichung habe ich zwei Oszilloskop-Bildschirmaufnahmen angehangen: Auf dem ersten Bild sind etwa vier Kurbelwellenumdrehungen zu sehen, auf dem zweiten Bild ein Ausschnitt, damit man den Signalverlauf und die gleiche Höhe der Impulse erkennen kann. Die Skalierung beträgt dabei 5V/Div und 20 ms/div bzw. 5ms/div. Nun zu meiner eigentlichen Anfrage: Hat jemand von Euch einen Vorschlag, wie man mit einfachen Mitteln (für mich heißt das: Lochrasterplatine, gut erhältliche Bauteile, Kleinspannungen oder PC ohne besondere I/O-Hardware) zu einem Generator kommen kann, der das gewünschte Signal erzeugen kann? Zwei Hauptwege sehe ich: 1. Mit PC und Soundkarte. Dahinter einen Verstärker (z. B. LM3886), um auf die entsprechenden Spannungen zu kommen. Zwei Kanäle hat jede Stereo-Soundkarte und der Verstärker muss an einem Eingangswiderstand der ECU von 77 kOhm nur wenig Strom liefern. Für diesen Weg habe ich aber das Problem, dass ich keine Software habe/kenne, die an den beiden Ausgängen beliebige Signalformen (bei mir also das o. g. Signal) mit variabler Frequenz (Leerlauf etwa 800 1/min entspricht 53 Hz für den KW-Sensor und 6,6 Hz für den NW-Sensor; Max-Drehzahl von 9000 1/min entspricht 600 Hz KW-Sens. und 75 Hz NW-Sens.) bereitstellt. Von der Problematik des in der Soundkarte eingebauten Hochpasses mit fc von schätzungsweise 15 Hz ganz zu schweigen. 2. Mit Logikbausteinen (NE555) und Frequenzteiler die benötigten Signale auf Logikpegel erzeugen und dann geeignet (Monoflop?) die Signalflanke bearbeitet, um der ECU ein ähnliches Signal zu liefern. Dahinter dann wieder entsprechend verstärken, um auf die Spannungshöhe zu kommen. Aber auch hier habe ich ein paar Probleme: Der Frequenzteiler kann aus T-Flip-Flops gebaut werden. Solche gibt es aber weder als IC zu kaufen, noch ist es als Macro im von mir verwendeten Tina-Ti Simulationsprogramm vorhanden. Die verfügbaren Flip-Flops müssen also erst geeignet verschaltet werden, um dann eingesetzt werden zu können. Wird also als ungeübter in el. Simulationsprogrammen etwas aufwändig. Kann mir hier jemand mit guten Lösungen für meine Stoperstellen helfen oder hat eine andere Idee? Hat vielleicht sogar jemand einen Schaltungsvorschlag, den ich dann einfach nachbauen kann? Danke für Eure Hilfe! Murkel
Angehängte Dateien:
Angehängte Dateien:
-

1180Umin-5msdiv.png
13 KB -

1250Umin-20msdiv.png
14 KB -

2500Umin-5msdiv.png
16 KB -

2500Umin-20msdiv.png
16 KB -

schaltung.png
56 KB




{kind=link}
{kind=link}
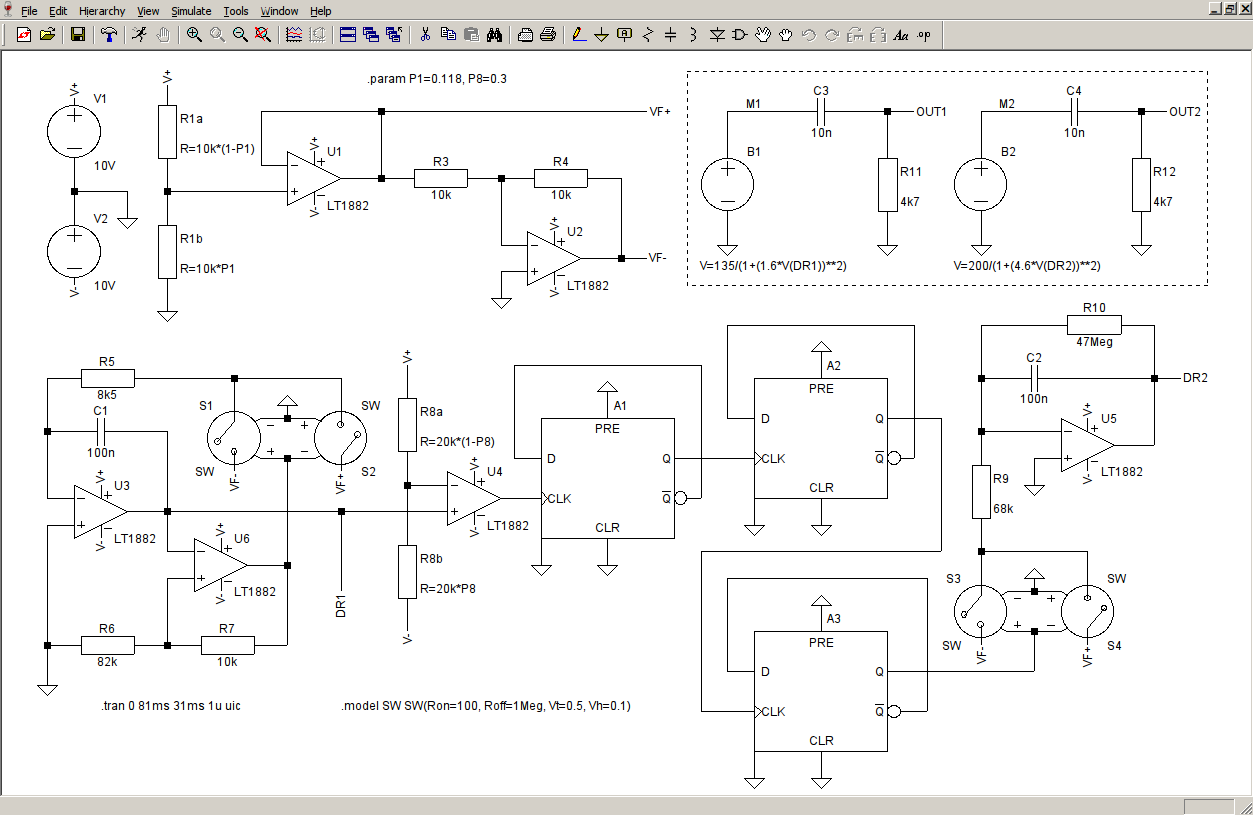
Murkel schrieb: > Für diesen Weg habe ich aber das Problem, dass ich keine Software > habe/kenne, die an den beiden Ausgängen beliebige Signalformen (bei mir > also das o. g. Signal) mit variabler Frequenz (Leerlauf etwa 800 1/min > entspricht 53 Hz für den KW-Sensor und 6,6 Hz für den NW-Sensor; > Max-Drehzahl von 9000 1/min entspricht 600 Hz KW-Sens. und 75 Hz > NW-Sens.) bereitstellt. Die Software müsstest du evtl. selber schreiben. Ich würde dann aber einen Mikrocontroller präferieren, da auf diesem das ganze Timing leichter zu programmieren ist. Über einen ADC könnte man ein Poti anschließen, mit dem die simulierte Drehzahl vorgegeben wird. > Der Frequenzteiler kann aus T-Flip-Flops gebaut werden. Solche gibt es > aber weder als IC zu kaufen, noch ist es als Macro im von mir > verwendeten Tina-Ti Simulationsprogramm vorhanden. Du kannst dafür auch D- oder JK-Fliplops nehmen, oder am besten gleich einen fertigen Binärzähler. Ich habe mal angefangen, so eine Schaltung in LTspice zusammenzubasteln. Die Schaltung erzeugt zwei Dreiecksignale (DR1 und DR2) mit gleicher Amplitude und einem Frequenzverhältnis von 8:1. Die Frequenz kann an einem Poti eingestellt werden. Dieses ist in LTspice implementiert als R1a und R1b, wobei über den Parameter P1 die Potistellung zwischen 0 und 1 vorgegeben werden kann. Alternativ kann man an den nichtinvertierenden Eingang von U1 ein Signalgenerator angeschlossen werden, mit dem dann Drehazhlprofile erzeugt werden können. 1V entspricht dabei etwa einer Drehzahl von 1000/min. Die Phasenlage der beiden Dreiecksignale zueinander kann mit dem Poti R8a/R8b eingestellt werden. In Mittelstellung fällt der Nockenwellen- impuls etwa mit einem der vier Kurbelwellenimpulse zusammen. Von da aus kann die Phase um ±180° (bezogen auf die Frequenz der Nockenwellenimpul- se) verstellt werden. Bei den Sensoren handelt es sich vermutlich um einfache Spulen mit magnetisiertem Kern ohne weitere Auswerteelektronik. Die induzierte Spannung ist proportional zur zeitlichen Ableitung des Magnetfelds. Diese kann mit einem Opamp-Differenzierer oder — wie in der Schaltung — mit einem RC-Hochpass realisiert werden. Dis Stärke Magnetfelds hat einen glockenförmigen Verlauf: Bei Annäherung der Nase nimmt sie zu, erreicht ihr Maximum, wenn die Nase genau vor dem Sensor steht, und nimmt danach wieder ab. Die Glockenkurve kann bspw. mit den Funktionen
oder
erzeugt werden. In der Schaltung habe ich letztere verwendet, allerdings hatte ich noch keine Muße, sie aus Bauteilen zu implemntieren und habe stattdessen in Spice jeweils eine entsprechend konfigurierte B-Quelle genommen. In der endgültigen Schaltung könnte man die Funktion entweder mit Analogrechenschaltungen (ein Addierer und zwei Multiplizierer) rea- lisieren oder mite einem pfiffigen Netzwerk mit nichtlinearen Bauteilen (z.B. Dioden) annähern. An dem gestrichelt umrahmten Schaltungsteil müsste also noch gearbeitet werden. Auch bei der Bauteilauswahl und der Versorgungsspannung kann sicher noch etwas optimiert werden. Die Opamps U4 und U5 sollten aber auf jeden Fall Rail-to-Rail-Ausgänge haben. Insgesamt funktioniert die Schaltung in der Simulation aber schon ganz passabel, wie die Bilder im Anhang zeigen. Die ersten beiden Bilder zeigen die Situation, die du mit dem Oszi aufgenommen hast (ca. 1180/min bzw. 1250/min). Für die beiden anderen Bilder wurde die "Drehzahl" mit dem Poti R1a/R1b auf 2500/min erhöht. Man sieht, dass sich die Signal- amplitude etwa verdoppelt. Das sollte in Realität auch so sein, da die in den Sensorspulen induzierte Spannung porportional zur Geschwindigkeit der Nasen ist. Die Phasenlage des Nockenwellenimpulses bleibt in etwa die gleiche, ohne dass sie am Poti R8a/R8b nachgestellt werden muss.
> LM3886 brauchst du nicht, so stark sind die Impulse der Sensorspule nicht. > NE555 ist eine gute Idee, schicke den einstellbaren Takt in einen CD4022. Der teilt durch 8. Nun noch aus dem NE555 Takt (kurze Nadelimpulse per Kondensator auf eine Widerstand) und den CD402 Ausgang (beliebig, sagen wir Q0, gösserer Widerstand) ein Signal mischen (musst du überhaupt mischen, sind das nicht 2 Eingänge ?).
Wenn es schnell gehen muss, dann nimm einen Arbitrary Waveform Generator.
Der der ursprünglichen Signale nach zu urteilen, handelt es sich um VR-Sensoren. Das ist im Prinzip ein Magnet mit einer Spule darumgewickelt. Diese Sensoren werden oft für genau den von dir geschilderten Fall verwendet (Kurbelwellensensor). Nähert sich die "Nase" der Kurbelwelle, ändert sich der Magnetische Fluss und eine Spannung wird induziert (dein Sensorsignal). Diese Sensoren werden normalerweise so ausgewertet, dass das Steuergerät auf die fallende Flanke triggert (die kommt genau in der Mitte der Nase). Wahrscheinlich reicht es aus, wenn du Rechteckimpulse generierst und diese über einen C / Hochpass auf den Sensoreingang des Steuergerätes gibst. Dies wäre wohl die einfachste Variante. mfg
Guten Abend den vielen Leuten, die geantwortet haben. Vielen Dank für Eure Beiträge und Vorschläge. Sie helfen mir sehr weiter. Auf die einzelnen Antworten gebe ich jetzt mal direkt meine Antwort und ggf. Fragen: Yalu X. schrieb: > > Die Software müsstest du evtl. selber schreiben. Ich würde dann aber > einen Mikrocontroller präferieren, da auf diesem das ganze Timing > leichter zu programmieren ist. Über einen ADC könnte man ein Poti > anschließen, mit dem die simulierte Drehzahl vorgegeben wird. Nun, da habe ich wohl ein Problem. Mit dem Schreiben der Software müsste ich mich erstmal auf eine eine Programmiersprache festlegen, die dann auf verschiedenen Rechnern und Betriebssystemen läuft (sind sowohl Macs, als auch Windows-Rechner dabei, auch Linux-Notebooks habe ich zur Auswertung von Daten in der Werkstatt). Bliebe wahrscheinlich Java und da fehlt mir etwas die Routine und der Ansatz. Wenn das ganze dann auch noch grafisch bedienbar sein soll, hört es bei mir auf und bis ich mir die Grundlagen erarbeitet habe, hab' ich auch eine Schaltung aufgebaut. Mit Mikrocontrollern hab eich gar keine Erfahrung und somit müsste ich mich auch da erst einarbeiten. > Du kannst dafür auch D- oder JK-Fliplops nehmen, oder am besten gleich > einen fertigen Binärzähler. Ja, habe ich auch gelesen und in Deiner Schaltung kann man es ja auch erkennen. Für meine Zwicke (der Vorab-Simulation am Rechner) habe ich ein Äquivalent zum genannten CD4022 gefunden, den SN74LS93. Dieser ist in Tina-Ti enthalten. Das Teilen von Impulsen habe ich also dank Eurer Hilfe hinbekommen. Jetzt zu Deiner Schaltung, Yalu. Vielen Dank für die Mühe! Ich versuche, die Schaltung zu verstehen und mit meinerm Simulationsprogramm nachzubauen. Was sind aber SW S1 und SW S2 sowie SW S3 und SW S4 für Bauteile? Sieht mir aus, wie ein Wechselrelais, gibt es so etwas auch als elektronisches Bauteil? Ansonsten denke ich, dass die exakte Nachbildung der Signalform nicht so wichtig ist, denn auch die ECU wird dieses Signal ja intern wieder so formen müssen, dass es verwendet werden kann. Nun eine kurze Antwort zu Dir, MaWin: Ja, Du hast völlig recht, der LM 3886 ist überdimensioniert, denn bei dem Eingangswiderstand des Steuergeräts fließt nur ein sehr kleiner Strom. Wie oben schon geschrieben, habe ich den CD4022 auch als Bauteil von TI gefunden und damit simuliert. Sieht schon sehr gut aus. Mischen muss sich dabei nichts, beide Sensoren haben einen eigenen Eingang in der ECU. Mischmasch, diese Idee hatte ich auch schon. Aber welcher (<500 €) Signalgenerator kann zwei unterschiedlich frequente Signale mit einem Verhältnis zueinander (Phasenlage) generieren? Mit der Frequenzteilerschaltung könnte man ja das Triggersignal für den zweiten Generator erzeugen, aber dann würde man schon zwei einzelne Arbitrary Waveform Generatoren benötigen. Die günstigen Teile von Velleman (PCGU1000) lassen sich nur sehr umständlich mit mehr als einem Gerät am PC bedienen. Michael, auch Du liegst völlig richtig. Es sind preiswerte VR-Sensoren. Wie so oft in der KFZ-Technik werden die preiswertesten Verfahren genommen, die das gesetzte Ziel erreichen. Hall-Sensoren wären wohl für diese Anwendung zu teuer. Dadurch erkauft man sich natürlich, dass man den Sensorabstand recht genau einstellen muss. Ist das Signal zu schwach (Abstand zu groß), gibt es einen schlechten Leerlauf, ist der Abstand zu gering, läuft der Motor bei hohen Drehzahlen schlecht bzw. erreicht seine Höchstdrehzahl nicht. Auch ist der Zündzeitpunkt leicht von dem Abstand abhängig. Also nochmal: Ich habe schon sehr viel Hilfe bekommen und nähere mich meinem Ziel. Vielen Dank Euch! Murkel
Murkel schrieb: > Nun, da habe ich wohl ein Problem. Mit dem Schreiben der Software müsste > ich mich erstmal auf eine eine Programmiersprache festlegen, die dann > auf verschiedenen Rechnern und Betriebssystemen läuft (sind sowohl Macs, > als auch Windows-Rechner dabei, auch Linux-Notebooks habe ich zur > Auswertung von Daten in der Werkstatt). Muss das den unbedingt auf allen Rechnern laufen, reicht nicht einer? > Was sind aber SW S1 und SW S2 sowie SW S3 und SW S4 für Bauteile? > Sieht mir aus, wie ein Wechselrelais, gibt es so etwas auch als > elektronisches Bauteil? Ja, das nennt sich Analogschalter. Der CD4053 wäre ein Beispiel für einen Dreifachumschalter. > Ansonsten denke ich, dass die exakte Nachbildung der Signalform nicht so > wichtig ist, denn auch die ECU wird dieses Signal ja intern wieder so > formen müssen, dass es verwendet werden kann. Es kommt halt darauf an, was du genau testen möchtest: Geht es nur um den Mikcrocontroller in der ECU, ist die Signalform egal, solange die Eingangsschaltung der ECU das Signal korrekt in Logikpegel umsetzt. In diesem Fall müsste man aber zumindest ungefähr wissen, wie das Signal umgesetzt wird, um zu entscheiden, was für ein Signal die Nachbildung der Impulsgeber liefern muss: Reicht ein 5V-Logiksignal? Oder muss auf einen positiven Impuls ein negativer folgen, weil die ECU den Nulldurchgang auswertet? Wenn du zusätzlich auch die Funktion der Eingangsschaltung der ECU tes- ten möchtest, spielen vielleicht auch die minimale Impulsbreite und Amp- litude des Signal eine Rolle, um sicherzustellen, dass das Einlesen über den ganzen Drehzahbereich richtig erfasst wird. Dann sollte das nachge- bildete Signal zumindest ungefähr dem realen entsprechen. Noch ein anderer Vorschlag: Anstatt Software zu schreiben oder Elektro- nik zusammenzulöten, könnest du einen kleinen Elektromotor zwei Kunst- stoffscheiben mit einer bzw. acht Stahlschrauben (als "Nasen") antreiben lassen und das gewünschte Signal mit echten Impulsgebern erzeugen.
Yalu X. schrieb: > Muss das den unbedingt auf allen Rechnern laufen, reicht nicht einer? Hallo Yalu, stimmt vollkommen. Wäre eher eine Maximalforderung, wenn man denn mal eine funktionierende Lösung hat. Also ausreichend wäre sicher ein kleines Programm, dass auf der Konsole/DOS-Box läuft. Selbst eine grafische Oberfläche wäre hier nur ein Bonus, nicht aber nötig. Also mal sehen, was Basic, C und Konsorten so an Soundausgabebefehlen so zu bieten haben. Vielleicht hilft mir ja auch MIDI weiter. Muss ich mich mal tiefer mit beschäftigen. >> Was sind aber SW S1 und SW S2 sowie SW S3 und SW S4 für Bauteile? >> Sieht mir aus, wie ein Wechselrelais, gibt es so etwas auch als >> elektronisches Bauteil? > Ja, das nennt sich Analogschalter. Der CD4053 wäre ein Beispiel für einen Dreifachumschalter. Danke auch für diesen Hinweis. Ist ja echt interessant, was es da so an Logikbauteilen und -funktionen gibt. Habe dann auch sofort Deine Schaltung nachgebaut und nach einigen Stolperstellen hat es dann auch geklappt. Habe dazu aber dann noch eine Verständnisfrage: Nach der Erzeugung des ersten Rechteck- bzw. später Dreiecksignals wird das Rechtecksignal in drei Flip-Flops durch 8 geteilt. Hat das Signal nach dieser Aktion nicht Logikpegel und die Analogschalter können dann nicht mehr bei 0,1 bzw. 0,5 V gegensinnig geschaltet werden? Ich hab' es bei mir so gelöst, dass der zweite Schalter ein invertiertes Signal des TLL Rechtecksignals bekommt und dann bei etwa 1,6 V umschaltet. Den Rest der Schaltung verstehe ich nach und nach und finde sie doch wirklich bemerkenswert und für die Problemstellung sehr gut geeignet. Respekt und danke dafür. Insbesondere, weil ja fast alles schon vordimensioniert (Werte der Bauteile) ist. > Es kommt halt darauf an, was du genau testen möchtest: Ja, darüber habe ich mich noch nicht ausgelassen: Ich möchte "von außen" (also ohne die applizierten Parameter aus dem EPROM auszulesen) die Funktionen der ECU und durch Änderung an einzelnen Parametern die Umsetzung der beinhalteten Gesetzmäßigkeiten ergründen. Die Eingangsschaltungen (Signalkonditionierung für die elektronischen Schaltungen) möchte ich jetzt einmal nicht prüfen und möglicherweise Defekte erkennen. Wie die Eingangsstufe funktioniert, weiß ich nicht und kann es jetzt nur durch Probieren herausfinden. Dazu hilft mir obige Schaltung schon mal gut weiter, weil ich sowohl das Rechtecksignal, als auch das Dreiecksignal zur Verfügung habe. Dank der Hinweise der anderen in diesem Thread weiß ich ja nun, dass sich ein Impuls durch ein Hochpass hinter einem Rechtecksignal erzeugen ließe. Zu Deinem weiteren Vorschlag: Das ist naheligend und habe es auch mal probiert. Aber die Signalnasen müssen schon recht ausgeprägt sein (Schraubenkopf ab SW5 reicht), und damit hat man dann schon eine Geberscheibe von etwa 50 mm Durchmesser. Diese muss recht gut gelagert sein und bis 5000 1/min (bei 8 Nasen am Umfang) drehen können. Auch muss der Motor diese Drehzahlen können und dann wird es a) mechanisch aufwändig und b) auch nicht ganz ungefährlich. Ich habe es zumindest mit normalen Bauteilen und ohne kleine mechanische Werkstatt im Hintergrund nicht geschafft. Daher mag ich die Vorstellung, demnächst ein Gehäuse mit zwei Potis zu haben, mit denen ich diese Funktion reproduzierbar, lautlos und ungefährlich nachbilden kann. Ich bin diesem Ziel ja schon ein Stück näher gekommen. Danke nochmal dafür. Murkel
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.