Hallo, Ich möchte meinem Roboter eine neue Elektronik mit neuen Motortreibern spendieren (die alten - ich glaube - L293 D auf dem Board sind zu schwach). Bei dem Motor handelt es sich um einen 5W Gleichstrom Motor mit Anlaufstrom 2.23A bei 12V. Betrieben wird der Motor mit einem 4 Zellen Lipo, es werden 16V im Mittel angenommen, woraus sich ein Anlaufstrom von ca. 2.97A ergibt. Ich habe mich für den L6205 entschieden, da er als DIP bei Reichelt verfügbar ist (austauschbar bei defekt und schnell herzubekommen, ist relativ dringend). Allerdings sind mir einige Sachen noch nicht ganz klar: Ist der L6205 (mit Kühlkörper und Lüfter) überhaupt ausreichend dimensioniert? Man kann den Treiber ja mit PWM (Arduino Board) auf Enable und In betreiben. Was ich bis jetzt gelesen habe, spricht für ein Betreiben auf den In Eingängen, da weniger Leistungsverlust und schonender für den Treiber. Ergibt sich sonst ein Nachteil? Sperrt der Treiber (also bremst) oder lässt er den Motor weiter frei laufen wenn Ins auf low, aber Enable auf high ist? Was ist das korrekte Schaltbild für das "Laufenlassen"? In low und Enable low? Da ein Omnidirektionaler Antrieb verwendet wird ist das Nicht-Sperren relativ wichtig. Eine Bremsenfunktion würde aber auch nicht schaden, die haben wir bisher nicht implementiert ;) Muss ich beim L6205 eine "Höchst PWM" beachten? Bei Bootstrap Treibern sollte man ja nicht auf PWM 100% gehen, welcher Wert ist beim L6205 in der Praxis tauglich? Welche Frequenz ist empfehlenswert? Kann ich die Schaltung aus dem Datenblatt einfach übernehmen? Muss ich etwas für meine Zwecke abändern? Wenn Enable auf low nichts bringt könnte ich den ja direkt mit 5V verbinden. Vielen Dank für Ihre Hilfe. Mit freundlichen Grüßen kernelpanix
K. L. schrieb: > Ist der L6205 (mit Kühlkörper und Lüfter) überhaupt ausreichend > dimensioniert? sollte passen, mit Sense Widerständen könnte man sogar den max. Strom begrenzen. K. L. schrieb: > Muss ich beim L6205 eine "Höchst PWM" beachten? Probieren, zwischen 0,5-5Khz K. L. schrieb: > Bei Bootstrap Treibern > sollte man ja nicht auf PWM 100% gehen der L6205 ist aber keiner K. L. schrieb: > Kann ich die Schaltung aus dem Datenblatt einfach übernehmen? Hänge die geplante Schaltung mal als .png an. Axel
Angehängte Dateien:
-

L6205.png
53 KB -

L6205_Bauteile.png
85 KB
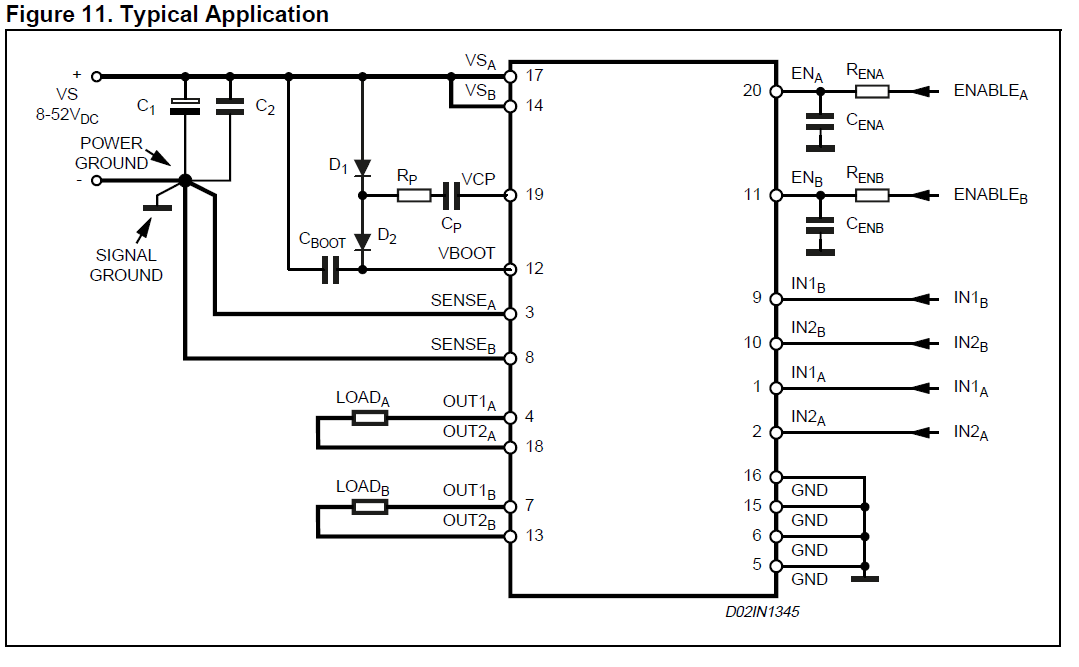
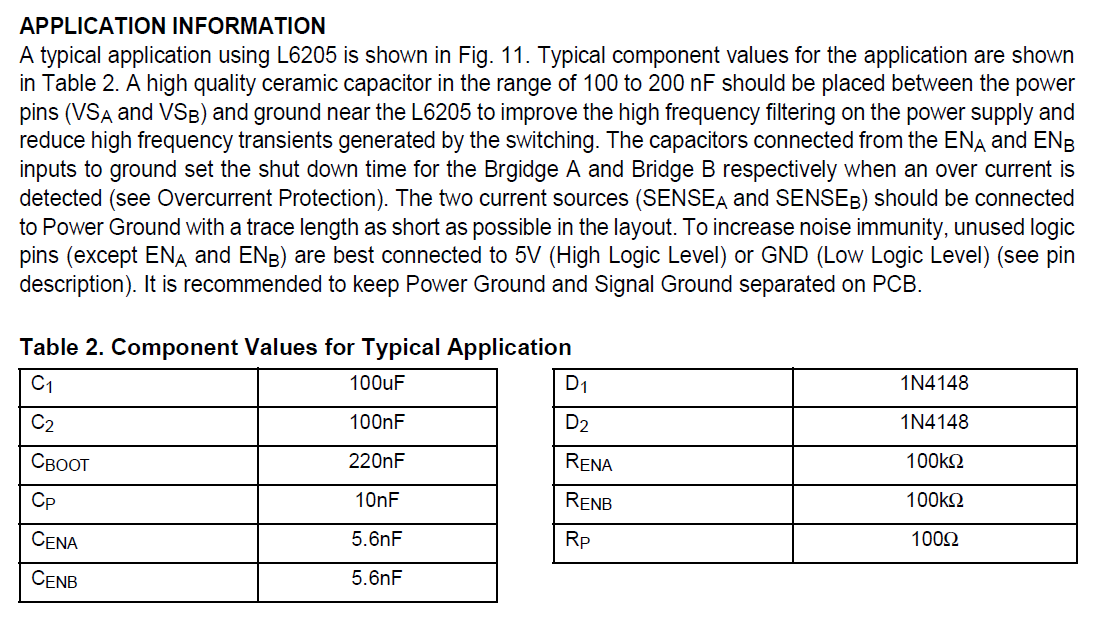
Es wird der angehängte Schaltplan mit den vorgeschlagenen Werten benutzt. Außerdem kommen noch wie im Text beschrieben 2 Kerkos zum Abblocken hin. Ob bzw. Wie ich die beiden Grounds trenne, muss ich noch schauen. Ist das sehr überlebenswichtig? Das ich auf voll PWM fahren kann ist schon mal gut. Ich habe nicht vor den Strom zu messen oder zu begrenzen, mehr als die 3A bei 16V (ok, der Akku kann 16.8 liefern, dementsprechend 3.122A), es sei denn, ich kann damit die Abschaltautomatik umgehen. Ein abschalten wäre während des Spiels nicht gerade gut, aber deshalb kommen auch Kühlkörper und Lüfter/Kühlpad drauf. Was mir noch nicht klar ist, soll ich zwei PWM auf den Ins nehmen oder den PWM auf Enable legen? Trotzdem schon mal danke Axel!
Hallo Axel, ich habe das mal in einer anderen Schaltung so gemacht, dass ich über einen weiteren Portpin des µC die Ena1 bzw.2 geschaltet habe und mit zwei Nand Gattern und noch einem weiteren Portpin jeweils die Richtung bzw. das PWM Signal zwischen den entsprechenden In1(2)A(B) Signalen umgeschaltet habe. Mit dieser Schaltung konnte ich dann einen Gleichstrommotor schön regeln. Als Endstufe war allerdings ein L298 eingebaut. Gruss Karsten
Hallo Karsten und Alex, Die Frage nach der Ansteuerung löse ich einfach, indem ich alle mit PWM fähigen Pins beschalte und teste ;) Ich denke, es dürfte sich soweit alles erledigt haben soweit ich nichts grundlegendes übersehen habe. Sense verbinde ich einfach mit Ground und für die Enabel Pins nehme ich die Beispielbeschaltung (auf die Gefahr hin, dass der Motor zu lange abschalten wird. Der Motor sollte aber unter keinen Umständen so viel Strom ziehen können). Mit freundlichen Grüßen kernelpanix
K. L. schrieb: > Die Frage nach der Ansteuerung löse ich einfach, indem ich alle mit PWM > fähigen Pins beschalte und teste ;) M. W. "sollte" an den "enable pin" keine PWM, das hat etwas mit der Doppelfunktion "enable" und "overcurrent/thermal protection" zu tun. Mag sein, dass es in Deinem Fall trotzdem geht. Ich kann mich nicht mehr erinnern, bei mir ging es nicht, kann aber auch an einem anderen Problem gelegen haben. Ich meine, dass der Kondensator am "enable pin" die PWM gestört hat. Wie dem auch sei, PWM sollte nur an die IN-Pins. Bei Richtungsänderung wechselt dann auch das PWM-Signal auf den anderen Pin. Das ist die Herausforderung ;-) Siehe auch: http://home.roadrunner.com/~perks/micros/Projects/Motor_Controller/Motor_Controller.htm Der L6206 hat zusätzliche Pins für "overcurrent/thermal protection", so dass bei diesem Typ das PWM-Signal wieder an "enable" kann. Zitat: In addition, L6206 gives the possibility of adjusting the trip point of the over current protection for each of the two full-bridges (through two external resistors), and its internal open-drain mosfets (see Over Current Protec- tion Section) are not internally connected to EN pins but to separate OCD pins, allowing easier external diagnos- tics and overcurrent management. K. L. schrieb: > Ob bzw. Wie ich die beiden Grounds trenne, muss ich noch > schauen. Ist das sehr überlebenswichtig? Durch die "sense" - Pins fliesst der komplette "Motorstrom". Zitat aus der AN: Primary mean in minimizing conducted noise is working on a good GND layout Specific care should be paid layouting the path from the SENSE pins through the sensing resistors to the negative terminal of the bulk capacitor (Power Ground). These tracks must be as short as possible in order to minimize parasitic inductances that can cause dangerous voltage spikes on SENSE and OUT pins Die "application note" legt sehr viel Wert auf diese Aspekte. Bei einem Motortreiber würde ich persönlich wenig "experimentieren". So günstig ist der L6205 nun auch wieder nicht ... K. L. schrieb: > ist relativ dringend Hmm. Beim L6205 galt bei mir: Gut Ding will Weile haben.
Hallo Roland, Im Endeffekt ist es dann doch egal ob ich einen PWM Pin an Enable route oder nicht, die kann man ja ohne weiteres als digitale benutzen. Naja, dann versuche ich mal das ganze als Massefläche zu realisieren. Mein Ergebnis seht ihr später. Aber Vielen Dank!
Angehängte Dateien:
-

Massefl_che.png
25 KB
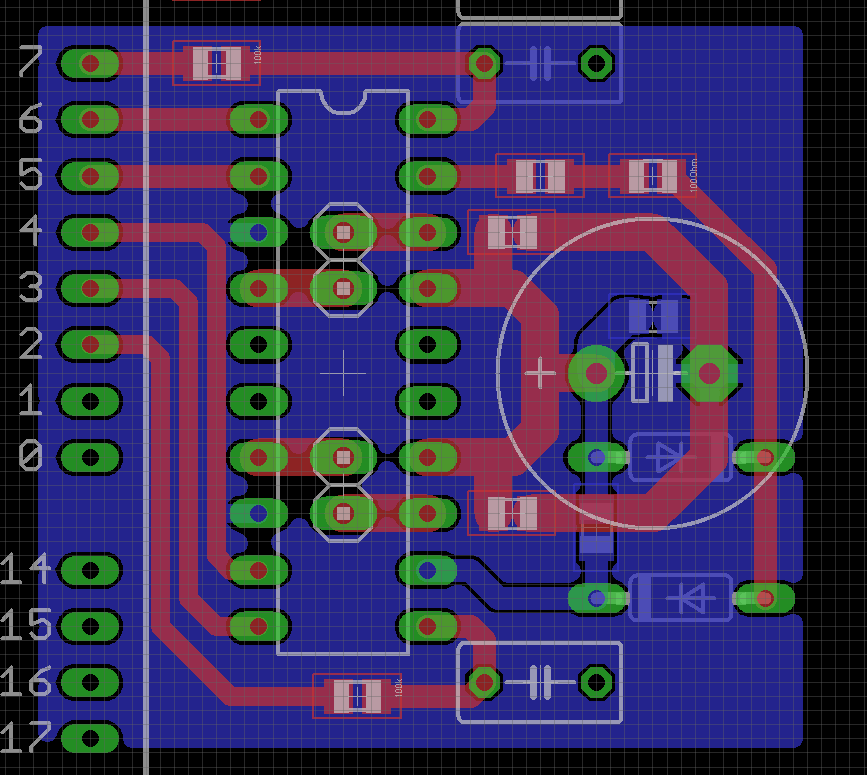
Hier ist schon das Kuddelmuddel. Ich hoffe mal das ist nicht zu lang von den Sense Ausgängen? Irgendwie hab ich die nämlich auf die andere Seite getan als die Kondensatoren.
Angehängte Dateien:
-

Massefl_che2.png
27 KB -

Motortreiber_Layout.png
24 KB
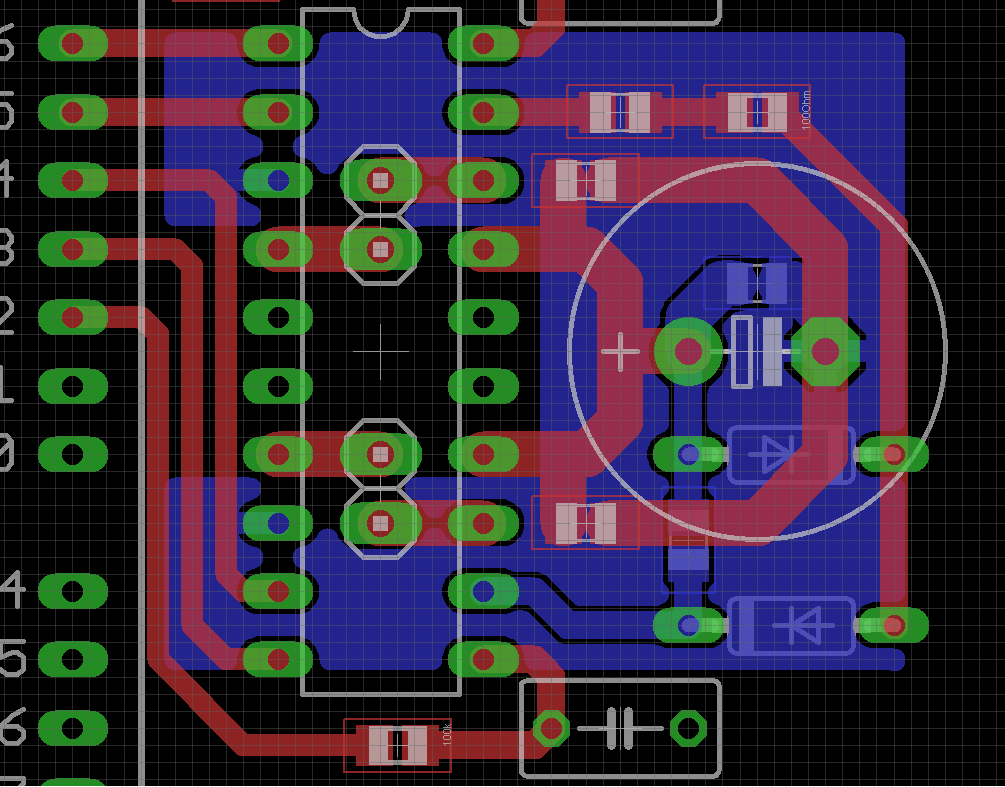
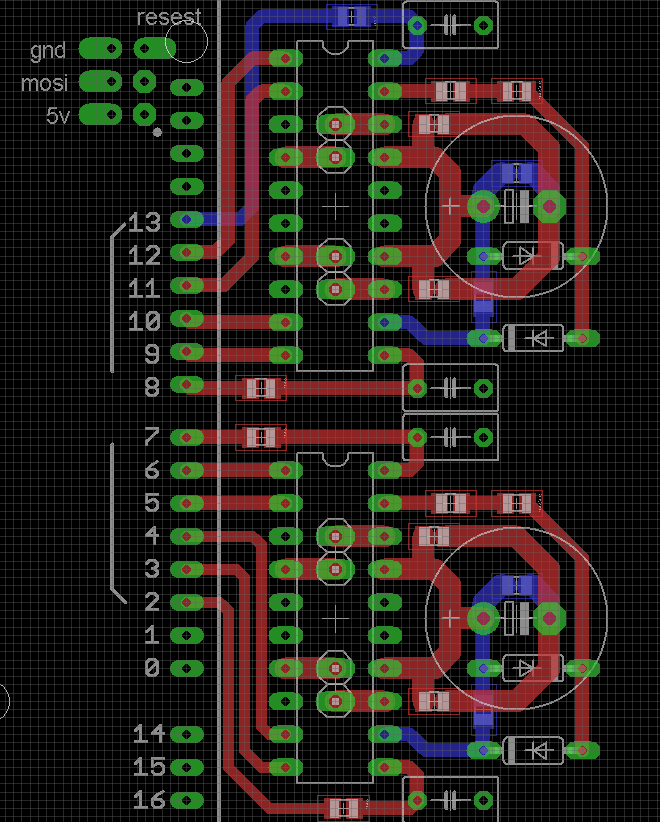
Hier eine "bessere" Variante (Signal Ground wäre sonst eingeschlossen) und noch ein Bild von beiden Motortreibern, wie sie gelayoutet werden sollen. Nicht das schönste, aber für den einen Wettkampf wird es schon taugen.
Hmm da werde ich doch noch umplanen müssen, die Sense Pins sind nur mit dem kleinen Streifen zwischen zwei weiteren Pins mit dem Elko verbunden. So wird das nicht optimal sein. Mal bestehende Layouts anschauen und weitersehen...
K. L. schrieb: > Im Endeffekt ist es dann doch egal ob ich einen PWM Pin an Enable route > oder nicht, die kann man ja ohne weiteres als digitale benutzen. Klar, sofern genügend HW-PWM-Pins vorliegen. War es nicht Arduino? Welcher µC? Wenn Du auf Nummer Sicher gehen willst, müsstest Du 3x HW-PWM-Pins routen: Enable und 2x IN.
Es ist der Arduino Mega 2560 und für andere Sachen brauche ich keine PWM Pins. Ich bin mir imme noch nicht sicher wie ich das vernünftig routen soll, so wie ich das verstanden habe sollen die Sense ja möglichst schnell zum Elko kommen? Wenn ich den auf die andere Seite verlege macht es auch Sinn, dass ich Kerkos zum Abblocken anbringen soll^^ 3 Kondensatoren direkt nebeneinander ergeben denke ich wenig Sinn.
Worin resultiert eine Sensing Resistor Wahl von 0 Ohm? Das wird mir noch nicht ganz klar. Vielen Dank. MfG kernelpanix
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.