Hallo, ich möchte gerne mit einem Schrittmotor eine hydraulischen Druckminderer steuern können. Mein Druckminderer ist stufenlos und von der kleinen Durchflussmenge bis zur größten sind es etwa 300° (grob geschätzt) was er gedreht werden muss. vorgestellt habe ich es mir so: Schrittmotor treibt eine gelagerte Welle an, auf der Welle ist eine Riemenscheibe und ein Flachriemen dreht dann den Druckminderer. Das Ganze will ich dann über einen Poti ansteuern. Drehe ich den Poti so soll sich der Schrittmotor auch drehen.
Statt Schrittmotoren nimmt man da besser Gleichstrommotre als Servo, die ein Poti auf der Achse genau so drehen, wie das Poti steht mit dem du es einstellen willst. So was kann man aus Einzel-ICs aufbauen, oder auch fertige nehmen: TLE4206 und TDA3629 geht bis 0.8A, MC33030 bis 1A, DRV590/591/593/594 bis 3A per PWM Auch Modellbauservos lassen sich dafür verwenden, wenn dir ihre geringe Lebensdauer und Kraft ausreicht.
Alexander schrieb: > Mein Druckminderer ist stufenlos und von der kleinen > Durchflussmenge bis zur größten sind es etwa 300° Ein Druckminderer stellt man nicht auf eine Durchflussmenge ein, sondern er soll bei jeder Durchflussmenge möglichst den eingestellten Druck halten. Insofern wäre zu überlegen ob man nicht den Druck misst und als Istwert einem Regler zuführt der solange nachstellt bis der vorgegebene Sollwertdurck erreicht ist. Fertig wirst du da eher nichst finden, da wird Basteln angesagt sein.
UR-Schmitt schrieb: > Ein Druckminderer stellt man nicht auf eine Durchflussmenge ein, sondern > er soll bei jeder Durchflussmenge möglichst den eingestellten Druck > halten. > Insofern wäre zu überlegen ob man nicht den Druck misst und als Istwert > einem Regler zuführt der solange nachstellt bis der vorgegebene > Sollwertdurck erreicht ist. > Fertig wirst du da eher nichst finden, da wird Basteln angesagt sein. sorry, falsch ausgedrückt :) Mit dem Druckminderer/Drosselventil wird die Geschwindigkeit eines Ölmotors gesteuert. Dieser Motor treibt einen Kratzboden an und die Geschwindigkeit sollte man vom Traktor aus steuern können. ich würde dann an die Welle einen Getriebemotor hängen, und auch noch einen Poti den ich mit Stirnrädern antreibe. Hat jemand eine fertige Schaltung dafür??
Alexander schrieb: > Mit dem Druckminderer/Drosselventil wird die Geschwindigkeit eines > Ölmotors gesteuert. Dieser Motor treibt einen Kratzboden an und die > Geschwindigkeit sollte man vom Traktor aus steuern können. Dann könntest du es dir auch einfacher machen. Ein Getriebemotor, und den Motor einfach über 2 Tasten links oder rechts rum laufen lassen. Über die Dauer der Betätigung steuerst du wie weit der Motor dreht und wie weit der Druckminderer verstellt wird. Vorteil Du brauchst keine Elektronik die über einen 2. Poti am Druckminderer den Istwert erfasst.
@ UR-Schmitt (Gast) >Vorteil Du brauchst keine Elektronik die über einen 2. Poti am >Druckminderer den Istwert erfasst. Nachteil, du siehst nicht auf welcher Stellung man steht, wenn die Sache nicht direkt einsehbar ist, was ich mal vermute. Ich würde ein Servo nehmen.
da man nicht genau erkennen kann auf welcher Stellung der Druckminderer gerade ist will ich es gerne so machen, das ich über einen Poti an der Welle den ist-wert abfragen kann. Hat jemand ne komplette Schaltung dafür??
Gegenfrage: Wieviel Weg brauchst du und welche Kraft muss der Antrieb leisten können? Würde ein Modellbauservo ausreichen? Da hast du einen Arm, der sich um 90° dreht (gibt auch welche mit mehr Weg). Vorteil: Die Elektronik gibts in Form eines einfachen Servotesters fertig. Denn so wie das aussieht, brauchst du alles fix fertig vorgekaut. Vielleicht findest du hier jemanden, der dir das schlüsselfertig entwickelt. Ich kanns mir aber nicht vorstellen.
Falk Brunner schrieb: > Nachteil, du siehst nicht auf welcher Stellung man steht, wenn die Sache > nicht direkt einsehbar ist, was ich mal vermute. Ja und, es geht doch nur darum ob der Mist schneller oder langsamer vom Anhänger heruntergedrückt wird. War ja nur ein Vorschlag wie es am einfachsten geht ohne daß er vom Traktor runter muss. Bedenkt bei euren Lösungen aber, das muss jedes Wetter, Dreck und auch mechanisch ne Menge aushalten. :-)
Hab schon viel mit Modellbau Servos und normalen Servoterster-Bausätzen von Conrad was gebaut. Aber ich befürchte der das Servo zu wenig Leistung hat, denn er dreht ja nur 90°. Ich denke mit einem Getriebemotor wirds am besten. Der Moto kommt in eine Alukiste die ich CNC Fräse. Somit sollte alles geschützt und stabile sein. Die Hauptelektronik will ich in die Steuerungskiste packen. (Da soll dann auch noch ein digitaler Fuhren-Zähler rein). Da ich noch Schüler bin und jetzt dann Ferien habe darf es ruhig komplizierter sein. Es soll mir ja nicht langweilig werden :D Das herstellen der Teile sollte auch kein Problem sein. Wir haben eine Schreinerei und in der Landwirtschaft meines Onkels (für den will ich die Steuerung auch bauen) eine Drehbank.
Hallo MaWin! > Statt Schrittmotoren nimmt man da besser Gleichstrommotre als Servo, > die ein Poti auf der Achse genau so drehen, wie das Poti steht mit dem > du es einstellen willst. Das kommt auf die Anwendung an. Oft drehen GS-Motore zu schnell, dann muss zusätzlich ein Getriebe her. Dann muss man sehen, ob man mit der Selbsthemmung leben kann. Das Rastmoment vom Schrittmotor ist dagegen als Bremse oft nützlich, kann aber durch eine entsprechend höhere externe Kraft überwunden werden, ohne etwas mechanisch zu beschädigen. Mit freundlichen Grüßen Thorsten Ostermann
Hmmm ... Warum wird nicht die Geschwindigkeit vom Hydraulikmotor gemessen und dementsprechend der Hahn langsam auf oder zu gedreht? Gruß Jobst
Alexander schrieb: > Hat jemand ne komplette Schaltung dafür?? Das kannst du ziemlich sicher abschreiben. Kauf dir einen Modellbau-Servo und einen Servotester. Dem Servotester verpasst du drei neue Potis als Serienschaltung anstatt dem Poti, das beim Kauf drin ist. Am mittleren kannst du dann die Position des Servos verstellen und an den äußeren beiden die Endstellungen. Die Potis müssen in Summe natürlich ungefähr den Widerstand des Originalpotis zusammenbringen. Wie du die Summe auf die 3 Potis aufteilst, kannst du grob aus deinen vorgegebenen Winkel des Stellrads errechnen. Das ganze ist natürlich weder betriebs- noch ausfallsicher. Generelle Frage: wie weit sind denn Servo und Poti auseinander? Alexander schrieb: > Da ich noch Schüler bin und jetzt dann Ferien habe darf es ruhig > komplizierter sein. Es soll mir ja nicht langweilig werden :D Gute Einstellung!
Michael H. schrieb: > Generelle Frage: wie weit sind denn Servo und Poti auseinander? ca. 4m das wird für die Impulseinleitung zu weit sein. der Servo wird ständig nachjustieren. Außerdem wird die Leitung bestimmt vom Kabel für die Lichter gestört. Ich möchte keinen servo verbauen. dreht nur 90° und dann würde ich eine zu große Übersetzung benötigen Ich möchte es gerne so machen: Schrittmotor der einen Poti folgt (Drehwinkel) ODER Getriebemotor (sehr langsam vill. 10U/min) der einen Poti antriebt und diesen wert als ist-wert nimmt und den anderen poti als soll-wert Ich benötige halt nur noch eine Schaltung dazu
> Das kommt auf die Anwendung an. Nein. Schrittmotor sind in der Anwendung völliger Humbug. Denn beim Einschalten weiß die Elketronik nicht wo der Schrittmotor steht. Sie muß also ENTWEDER trotzdem ein Positionsrückmeldepoti haben, ODER den Schrittmotor erst mal an einen Anschlag fahren um dann zu wissen wo er steht (Prinzip Floppylaufwerkkopfpositionierung). > Oft drehen GS-Motore zu schnell, dann muss zusätzlich ein Getriebe her. Natürlich Getriebe, er braucht ja wohl vermutlich Kraft und nicht so besonders viel Schnelligkeit, aber auch mit Getriebe sind gleich leistungsfägige Gleichstrommmotore baulich erheblich kleiner und um Längen billiger als Schrittmotore. Getriebemotoren gibt es günstig fertig und haben viel Kraft: http://www.pollin.de/shop/dt/NTY2OTg2OTk-/Motoren/DC_Getriebemotoren/Gleichstrom_Getriebemotor_CBxx.html > Dann muss man sehen, ob man mit der Selbsthemmung leben kann. Falls man das Ding was vom Motor gedreht wereden soll auch noch vor Ort per Hand verdrehen will, kann man eine Rutschkupplung einbauen. Ein eher schlechter Schrittmotor ist also nicht nötig. Zudem Thorsten: kennst du auch nur EINEN fertig programmierten IC, der das macht, was Alexander sucht ? Also mindestens ein Potianschluss, 2 Steuerausgänge DIR/STEP, und ein Programm welches den Potibereich in Schritte von Anschlag zu Anschlag umwandelt ? Bessere ICs müssten auch wissen, wie schnell die Beleunigungsrampe ist (z.B. Trimmpoti) und programmierbar sein wie viele Schritte es insgesamt sind (z.B. EEPROM und ein Mal per Taster erfassen). Ich kenne kein fertiges IC bzw. fertig programmierten Controller. So häufig kann also der Schrittmotor als Servo keine gute Lösungf gewesen sein, sonst gäbe es solche ICs.
> Ich möchte es gerne so machen: > Getriebemotor (sehr langsam vill. 10U/min) der einen Poti antriebt und > diesen wert als ist-wert nimmt und den anderen poti als soll-wert > Ich benötige halt nur noch eine Schaltung dazu Die steht im Datenblatt der genannten ICs.
Angehängte Dateien:
-

Unbenannt.jpg
66 KB
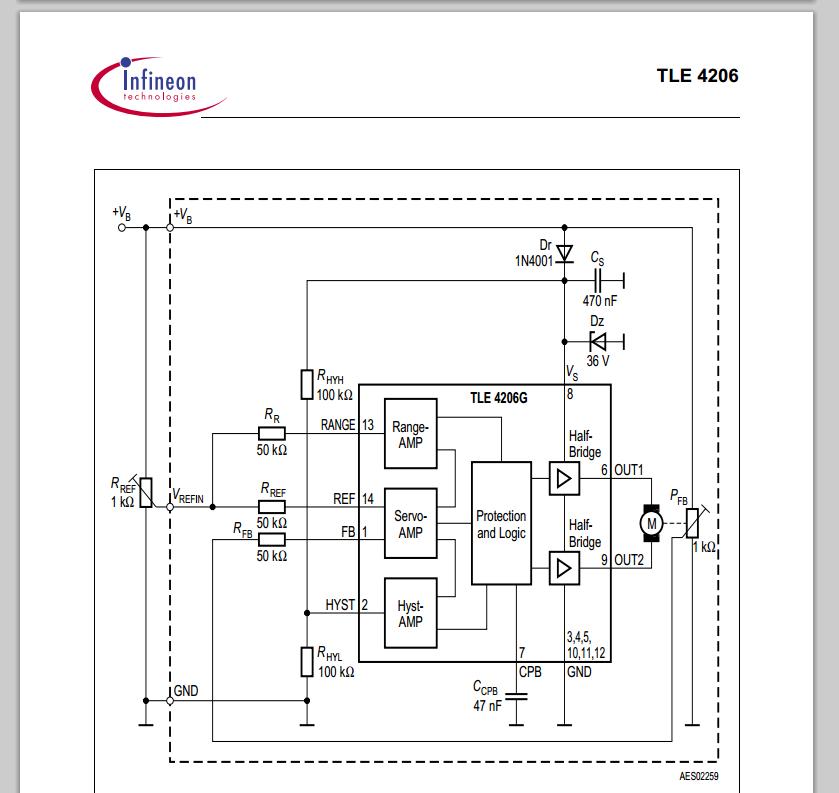
MaWin schrieb: > TLE4206 und TDA3629 geht bis 0.8A, MC33030 > bis 1A, DRV590/591/593/594 bis 3A per PWM Das Einzige was ich jetzt gefunden habe war vom TLE4206 http://www.ebay.de/itm/TLE4206G-Manu-INFINEON-Encapsulation-SOP-Power-Semiconductors-for-Automotive-/110886811161?pt=LH_DefaultDomain_0&hash=item19d15e7619#ht_2172wt_1110 Aber dieser geht nur bis 0,8A Ein "normaler" Getriebemotor wird ja 2-3A haben oder? und das mit den DRV per PWM verstehe ich nicht ganz. Außerdem sind die Bauteile SMD. eine DIP größe wäre mir viel lieber um alles auf ein Lochraster zu löten. Wie viel U/min sollte den der Getriebemotor haben? Dachte so an 10 U/min Hat jemand einen rumliegen?? Danke
Es wäre mir echt zu blöd, dort irgendwo ein Poti unter zu bringen. Ich würde mit einem induktiven Sensor an irgendeiner angetriebenen Stelle die Drehzahl des Hydraulikmotors erfassen, diese mit einer Sollgeschwindigkeit (NE555) mittels eines Phasenvergleichers (4046) vergleichen und damit den Hahn weiter auf oder zu drehen. Zu langsam -> Hahn weiter auf Zu schnell -> Hahn weiter zu Die absolute Position, in der sich der Hahn befindet, ist damit unwichtig. Gruß Jobst
Jobst M. schrieb: > Ich würde mit einem induktiven Sensor an irgendeiner angetriebenen > Stelle die Drehzahl des Hydraulikmotors erfassen, diese mit einer > Sollgeschwindigkeit (NE555) mittels eines Phasenvergleichers (4046) > vergleichen und damit den Hahn weiter auf oder zu drehen. Und wie kommst du jetzt drauf, dass es bei einem hydraulischen Druckminderer irgendsowas wie eine Sollgeschwindigkeit gibt. Sein einziger Job ist es, den A-Druck unabhängig vom P-Druck und Schwankungen des Durchflusses stabil zu halten.
Werner schrieb: > Und wie kommst du jetzt drauf, dass es bei einem hydraulischen > Druckminderer irgendsowas wie eine Sollgeschwindigkeit gibt. Sein > einziger Job ist es, den A-Druck unabhängig vom P-Druck und Schwankungen > des Durchflusses stabil zu halten. Wie wärs wenn du einfach mal lesen würdest..? Alexander schrieb: > Mit dem Druckminderer/Drosselventil wird die Geschwindigkeit eines > Ölmotors gesteuert. Dieser Motor treibt einen Kratzboden an und die > Geschwindigkeit sollte man vom Traktor aus steuern können. Die Idee von Jobst finde ich auch am besten, dann hat er auch ne richtige Regelung und keine lahme Steuerung :-)
Hab den link nicht mehr aber ich hatte auch mal einen Schrittmotor gesucht. Dabei bin ich auf einen Schrittmotor gestoßen mit integrierter Schrittrückmeldung, sogar speichernd. Wurde dann per I²C übertragen. Wenn es um die Applikation geht einen Schrittmotor mittels Poti zu steuern, schau dir mal die Beispiele für die Arduinos an: http://arduino.cc/en/Tutorial/MotorKnob Sollte aber nur als Ansatz dienen. Ansonsten Servo mit Poti: http://arduino.cc/en/Tutorial/Knob http://arduino.cc/en/Tutorial/Sweep MfG
> Das Einzige was ich jetzt gefunden habe war vom TLE4206 > Ebay-Artikel Nr. 110886811161 > Aber dieser geht nur bis 0,8A Passt doch. > Ein "normaler" Getriebemotor wird ja 2-3A haben oder? > Wie viel U/min sollte den der Getriebemotor haben? > Dachte so an 10 U/min > Hat jemand einen rumliegen?? Der genannte hat das alles, braucht unter Last keine 0.25A bei 12V, und ein Z12 Zahnrad auf ihm kann ich nicht festhalten. > und das mit den DRV per PWM verstehe ich nicht ganz. Die Chips mit dem Namensanfang DRV verwenden PWM um den Motor in der Drehzahl zu regeln. > Außerdem sind die Bauteile SMD. eine DIP größe wäre > mir viel lieber um alles auf ein Lochraster zu löten. Tja, das Leben ist hart. Zumindest sind Extrawünsche teurer. http://www.ebay.de/itm/MC33030P-Manu-ON-MOT-Encapsulation-DIP-16-DC-SERVO-MOTOR-CONTROLLER-DRIVER-/110887360466?pt=LH_DefaultDomain_0&hash=item19d166d7d2
> http://arduino.cc/en/Tutorial/MotorKnob Hey, die gesuchte Schaltung mit Programm. Steppt zwar immer 1024 Schritte, aber man könnte für 300 Grad das Poti mit Voriderständen im Breich einscgrönken. > Ansonsten Servo mit Poti: Das hat man aber früher mit einem NE555 gemacht, ein Arduino ist da ganz klar overdressed.
MaWin schrieb: > > Das hat man aber früher mit einem NE555 gemacht, > ein Arduino ist da ganz klar overdressed. is doch das µC-Forum ;) der Nano oder Mini geht doch auch mit den examples.
hat keiner ne Schaltung die ich nachbauen kann? entweder das ein Schrittmotor dem poti folgt oder das ein Getriebemotor dem Poti folgt?
Michael H. schrieb: > Alexander schrieb: >> Hat jemand ne komplette Schaltung dafür?? > Das kannst du ziemlich sicher abschreiben. Sehr sicher... Alexander schrieb: >> Generelle Frage: wie weit sind denn Servo und Poti auseinander? > > ca. 4m das wird für die Impulseinleitung zu weit sein. der Servo wird Absolut kein Problem. Man muss es nur richtig machen. > Schrittmotor der einen Poti folgt (Drehwinkel) Käse und dazu noch teurer als ein Servo. > Getriebemotor (sehr langsam vill. 10U/min) der einen Poti antriebt und > diesen wert als ist-wert nimmt und den anderen poti als soll-wert Das IST ein Servo. > Ich benötige halt nur noch eine Schaltung dazu "nur"... die Schaltung ist doch das A und O der ganzen Angelegenheit... Wie stehts mit Eigeninitiative? Wie ist dein Kenntnisstand, was hast du schon so alles gebaut?
> hat keiner ne Schaltung die ich nachbauen kann?
Du hast 1 Dutzend bekommen, zuerst für Getriebemotoren
in den Datenblättern, dann per Arduino für Schrittmotore.
Es wurden ICs genannt, alle über eBay erhältlich, und
Motoren mit Bezugsquelle.
Mehr geht nicht. Irgendwann musst du mal anfangen dir
die Finger dreckig zu machen.
Ich habe jetzt diese Schaltung gefunden. http://www.elexs.de/servo3.htm was haltet ihr von der zweiten?? Fragen dazu: kann ich einfach einen 12V Getriebemotor dranhängen?? wie viel Amper darf er max haben?? kann ich am Steuerungseingang (0-5V) einfach einen Poti dranhängen mit dem ich dann den Drehwinkel einstellen kann?? Wäre super wenn diese Schaltung auch geht dann muss ich keinen IC aus dem Ausland bestellen. Hat keiner einen Getriebemotor mit ca. 10U/min rumliegen?? danke
Alexander schrieb: > Fragen dazu: > kann ich einfach einen 12V Getriebemotor dranhängen?? > wie viel Amper darf er max haben?? Wie wärs, sich mit ein paar Grundlagen zum Thema Transistoren zu beschäftigen? Die Schaltung ist so einfach und auch noch so schön erklärt... Wieso sollte dir hier jemand vorkauen, was bei deinem Link schon alles zu finden ist? Du zeigst dich hier im Thread ganz schön faul... > kann ich am Steuerungseingang (0-5V) einfach einen Poti dranhängen mit > dem ich dann den Drehwinkel einstellen kann?? ja. > Hat keiner einen Getriebemotor mit ca. 10U/min rumliegen?? Es gibt tausende Läden, die haben so viel, dass sie die sogar verkaufen!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.