Da ich noch Schüler bin und jetzt Ferien habe wollte ich ein neues Projekt starten. Gleichmal vorweg, ich hab mir alles mit Elektronik selber beigebracht. Als neues Projekt habe ich mir gedacht ich baue einen Rasenroboter. Ich habe jetzt dieses Projekt gefunden bei denen die Schaltpläne und die .hex Datei veröffentlicht ist. Was haltet ihr davon?? http://www.tomanja.de/robitobi/index.htm Der Bau es eigentlich Fahrzeuges sollte kein Problem sein. Haben eine Schreinerei mit Drehbank und Metallfräse. Wie bei meinen letzten größeren Bauten wäre es nicht schlecht wenn ich eine Schaltung habe die ich einfach nur nachbauen muss. (Letzte Bauwerke waren: CNC Fräse und Ambilight) Was sagt ihr zu den Schaltungen auf der Seite? Hat vielleicht jemand diesen Roboter schon nachgebaut?? Kennt ihr weitere Schaltungen für Rasenroboter?? danke
Endlich jemand, der es der unfähigen Rasenmäheridustrie zeigt wies geht. Sollte doch kein Problem sein zwischen Unkraut und Rosenbeeten unterscheiden zu können.
Benötigt man dazu heutzutage tatsächlich noch Schleifen im Boden und Schleifensensoren? Per Differential-GPS mit Trägerphasenauswertung: http://de.wikipedia.org/wiki/Differential_Global_Positioning_System ist nahezu eine "Grashalm-genaue" Ortsbestimmung möglich.
>Robitobi...
Frag den Erbauer doch mal an. er soll die Elektronik als fertiges Geraet
fuer ein paar Ocken rueberreichen...
Die Elektronik ist so unwichtig, da tut es ein simpelster Sensor und simpelste (Relais-)schaltung. Die Mechanik ist wichtig, denn der RobiTobi walzt eher das Gras durch hundertfaches drüberollen in jeder Richtung komplett platt, als daß er es mit seine Winzmessern an seinem Winzmotor irgendiwe abmäht. Es hat schon seinen Grund, warum richtige Rasenmäher eine Nummer grosser sind.... Und zum Schluss sollte er zur Ladestation zurückfinden, das find ich auch ganz wichtig, und nicht einfach auf dem Rasen wegen Unterspannungsabschaltung stehen bleiben. Dazu braucht es dann aber INTELLIGENTE ELektronik.
RasenNavi schrieb: > Benötigt man dazu heutzutage tatsächlich noch Schleifen im Boden und > Schleifensensoren? > > Per Differential-GPS mit Trägerphasenauswertung: > > http://de.wikipedia.org/wiki/Differential_Global_Positioning_System > > ist nahezu eine "Grashalm-genaue" Ortsbestimmung möglich. Oder vielleicht man programmiert dem Lawnmower Man äähhh Lawnmower Robot eine Karte des Geländes ein. So oft sollte sich dieses ja nicht ändern ;-)
Und ne kleine automatische Betoniereinheit einbauen, da gibts dann keine Probleme mehr mit dem dämlichen Rasen.
Mark Brandis schrieb: > Oder vielleicht man programmiert dem Lawnmower Man äähhh Lawnmower Robot > eine Karte des Geländes ein. So oft sollte sich dieses ja nicht ändern > ;-) Ohne Referenzpunkte eher aussichtslos wegen Schlupf und anderen Dingen. MaWin schrieb: > Die Mechanik ist wichtig, denn der RobiTobi walzt eher das Gras durch > hundertfaches drüberollen in jeder Richtung komplett platt, als daß er > es mit seine Winzmessern an seinem Winzmotor irgendiwe abmäht. > Es hat schon seinen Grund, warum richtige Rasenmäher eine Nummer grosser > sind.... Es wäre schon mal ein Anfang, wenn statt der Cuttermesser Messer aus landwirtschaftlichen Scheiben- bzw. Trommelmähwerken verwendet würden (wo das gleiche Messerkonzept nur in stabiler Ausführung verwendet wird).
gaast schrieb: > Mark Brandis schrieb: >> Oder vielleicht man programmiert dem Lawnmower Man äähhh Lawnmower Robot >> eine Karte des Geländes ein. So oft sollte sich dieses ja nicht ändern >> ;-) > > Ohne Referenzpunkte eher aussichtslos wegen Schlupf und anderen Dingen. Ich stell mir das so vor: Der Roboter startet immer vom gleichen Punkt aus, meinetwegen in der "linken unteren" Ecke (von oben gesehen). Man setzt ihn da hin, drückt auf die "Position Reset" Taste die man ihm spendiert hat, und los geht's.
Mark Brandis schrieb: > Ich stell mir das so vor: Der Roboter startet immer vom gleichen Punkt > aus, meinetwegen in der "linken unteren" Ecke (von oben gesehen). Man > setzt ihn da hin, drückt auf die "Position Reset" Taste die man ihm > spendiert hat, und los geht's. Ahnung von allem, der Junge, Respekt!
Wenn die Rasenfläche wirklich so groß ist, dann kauf dir ein gebrauchtes Schaf (so um die 150 Euro), täglich den Pflock versetzen, damit jede Ecke gemäht (mäh) wird. Zum Herbst gibts dann schmackhaftes Schafsfleisch. Umweltfreundlicher kann man nicht mähen.
Angehängte Dateien:
-

IMG_1367.jpg
1,2 MB
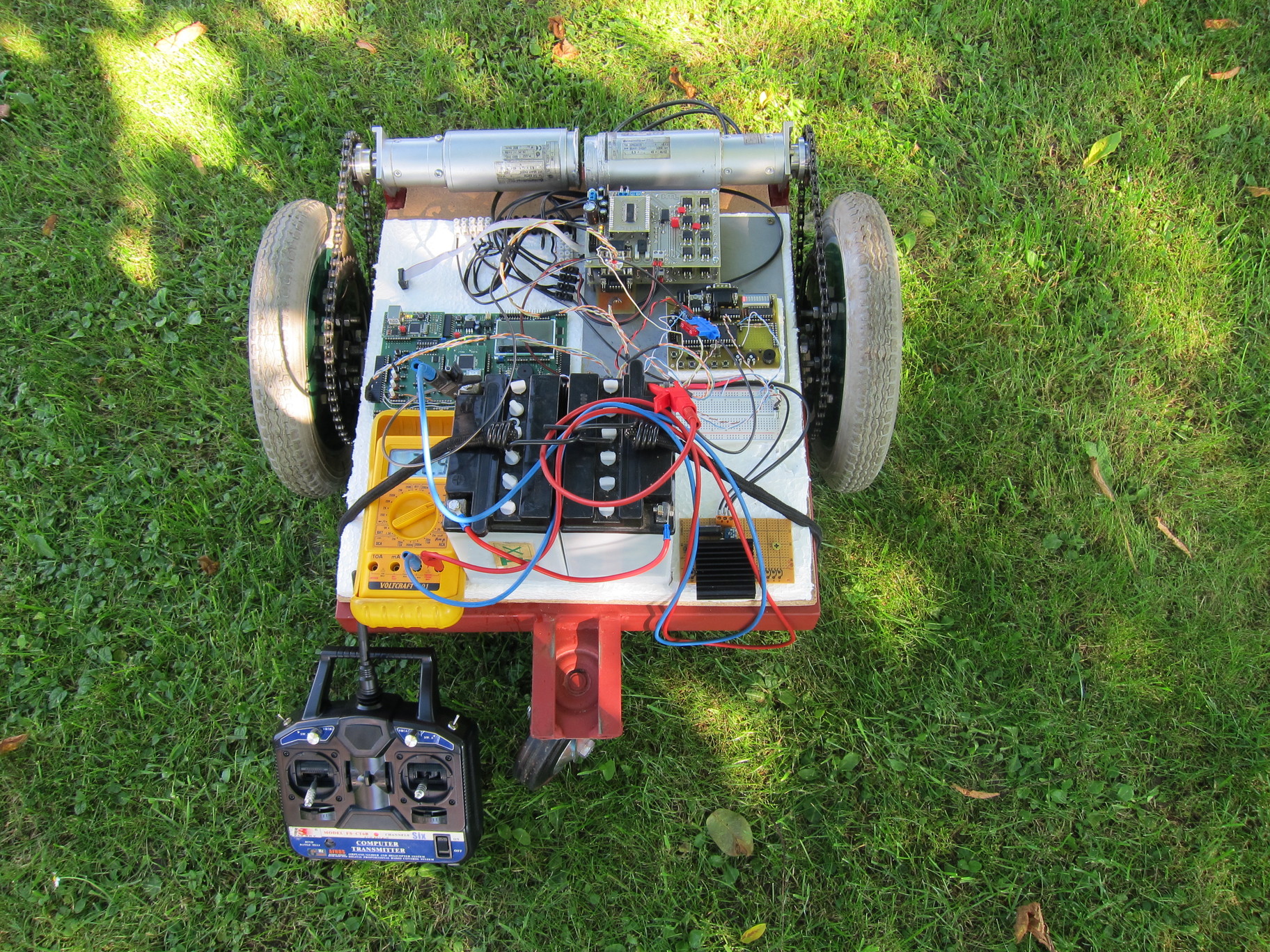
Bin auch Schüler und baue auch gerade einen Rasenroboter. Wobei ich ihn "eine Nummer" größer baue. Meine Antriebsmotoren haben je 100W. Das "noch nicht" vorhandene Mähwerk wird von einem 500W starken Scooter Motor angetrieben werden.
Mark Brandis schrieb: > Ich stell mir das so vor: Der Roboter startet immer vom gleichen Punkt > aus, meinetwegen in der "linken unteren" Ecke (von oben gesehen). Man > setzt ihn da hin, drückt auf die "Position Reset" Taste die man ihm > spendiert hat, und los geht's. [ ] du hast mein Posting gelesen [ ] und verstanden http://de.wikipedia.org/wiki/Schlupf
Für sowas braucht man fundierte Kentnisse in Mechanik, Elektronik und Softwareentwicklung. Sonst kannste das vergessen. Ich habe früher Roboter für Wettbewerbe gebaut, da gings um Teelichter einsammeln usw. Auf ner ebenen Fläche, innenraum. Schon dabei ist der Aufwand für die Entwicklung eines "guten" Roboters enorm. Die erfolgreichsten Teams hatten 3 Mann, jeden für einen Teilaspekt. Schon da sind Themen wie Motorregelung, Schlupf, Drehzahlmessung, Positionserkennung, Home-Finding usw. nicht zu verachten. Ohne sowas fährt das Ding nichtmal 2 Meter geradeaus. Die Anforderungen die da noch dazu kommen, wenn das Ding draußen auf ner Wiese betrieben werden soll, vorallem an die Mechanik aber auch an die SW, sind sehr hoch. So einfach mal ne Schaltung nachbauen ist da nicht. gruß cyblord
Bei allem was sich autonom bewegt sollte man zuerst mal ein Sicherheitskonzept haben. Gerade bei einem Rasenmäher denn außer Gras und Rosen kann der auch Füße, Finger und Kaninchen bearbeiten. Was passiert wen er umstürzt, einen Hang hinunter rollt von den Nachbarskindern mit dem Fußball abgeschossen wird in den Gartenteich fährt, der Rasenspringer angeht.... Wie schnell kann das Mähwerk gestoppt werden oder sein Klemmen erkannt werden. Wenn das und viele weiter Punkte klar sind kann man sich einen Prozessor überlegen.
Hoffnung stirbt zuletzt. Wenn Alex seinen Robi-Link genauer gelesen hätte, wüßte er, daß die Baustelle etwas größer wird. Wenn er 2012 die Mähmechanik zum Laufen bringen würde, wäre das schon ein großer Erfolg. Mit der Steuerung wird er wohl noch ein "paar Tage" länger brauchen bis die GPS-Genauigkeit durch das Europäische Gallileo System ausreicht.
gaast schrieb: > > [ ] du hast mein Posting gelesen > [ ] und verstanden > > http://de.wikipedia.org/wiki/Schlupf Und, wieviel macht der aus? Einen Meter Ungenauigkeit auf zehn Meter Wegstrecke doch wohl kaum, sondern geschätzt eher ein paar Zentimeter. Damit kann ich zumindest gut leben, und weitere Korrekturen sind möglich. Außerdem sind Rasenflächen üblicherweise nicht zehntausend Quadratmeter groß und ohne jede Begrenzung und ohne jedes Hindernis (z.B. Baum, Vogeltränke, Mauer/Zaun zu Nachbars Garten hin etc.) Wenn mein Sensor mir sagt dass ich eben gerade gegen die Mauer gefahren bin, die ich erst nach weiteren zehn Zentimetern Wegstrecke erwartet hätte, dann kann man die Position eben um diese zehen Zentimeter wieder korrigieren. Ein perfektes Ergebnis wird bei einem Hobby-Selbstbau-Projekt ohnehin niemand erwarten.
Und das ganze nasse Gras, das ständig umher fliegt macht verstopft sich er den ein oder anderen Sensor. Fange mal kleiner an und baue einen Roboter-Staubsauger.
Volle schrieb: > Was passiert wen er umstürzt, einen Hang hinunter rollt > von den Nachbarskindern mit dem Fußball abgeschossen wird > in den Gartenteich fährt, der Rasenspringer angeht.... Das sind zumindest teilweise Dinge, die man ausschließen kann (hier: Rasenfläche ist eben, kein Gartenteich, Rasensprenger kann man ausschalten).
Mark Brandis schrieb: > Und, wieviel macht der aus? Einen Meter Ungenauigkeit auf zehn Meter > Wegstrecke doch wohl kaum, sondern geschätzt eher ein paar Zentimeter. lol, ich sags ja, Ahnung von allem... Junge wir reden hier über hubbeligen Rasen (auf dem zu allem Überfluss auch mal Stöckchen, Tannenzapfen, oder was auch immer liegen können) und nicht über einen polierten Hallenboden...
Da Dieter schrieb: > lol, ich sags ja, Ahnung von allem... Junge wir reden hier über > hubbeligen Rasen (auf dem zu allem Überfluss auch mal Stöckchen, > Tannenzapfen, oder was auch immer) und nicht über einen Hallenboden... Wie gesagt, Korrekturen der Position sind jeweils an den Rändern und an sonstigen (festen, bekannten) Hindernissen auf der Rasenfläche möglich. Tannenzapfen und herabgefallene Zweige muss man ohnehin von Hand entfernen, so wie man es auch beim herkömmlichen Rasenmähen machen würde. Also kann man das doch machen und danach den Roboter laufen lassen.
Mark Brandis schrieb: > Da Dieter schrieb: >> lol, ich sags ja, Ahnung von allem... Junge wir reden hier über >> hubbeligen Rasen (auf dem zu allem Überfluss auch mal Stöckchen, >> Tannenzapfen, oder was auch immer) und nicht über einen Hallenboden... > > Wie gesagt, Korrekturen der Position sind jeweils an den Rändern und an > sonstigen (festen, bekannten) Hindernissen auf der Rasenfläche möglich. > > Tannenzapfen und herabgefallene Zweige muss man ohnehin von Hand > entfernen, so wie man es auch beim herkömmlichen Rasenmähen machen > würde. Also kann man das doch machen und danach den Roboter laufen > lassen. Bei einer solch Laxen herangehensweise würde dein Roboter nach 1 Minute nicht mal mehr wissen in welche Richtung er gerade guckt. So navigierts sich gar nicht gut. Und das kannst du nicht alles über GPS lösen. Wenn er sich z.B. um die eigene Achse dreht muss er wissen wie weit. Das kann man über die Räder machen, aber der Schlupf halt. Man kann es über Kompassensoren machen, aber die sind ungenau und störanfällig. Das ist alles nicht so trivial. Abgesehen davon dass man auch die Basis irgendwann wieder finden muss. Eine hügelige Wiese ist der Alptraum für den Roboterbauer. Das mag alles unter Vorführbedingungen gut gehen. Aber für eine Alltagstauglichkeit brauchts dann etwas mehr. Allerdings kommerzielle Mähroboter gibts und die funktionieren gut. Bei uns nebenan hat eine Firma sowas. Nen knall orangenes Ding fährt da den ganzen Tag auf denen ihrem Rasen rum. gruß cyblord
Vielleicht interessant: Meine Eltern haben so einen Mäher von Husquarna mit Bodenschleife. Ich war da auch erst skeptisch, aber das Ding erfüllt seinen Zweck tatsächlich richtig gut. Der Mäher fährt einfach zufällig über die Wiese (auch nicht unbedingt gerade), bis er auf die Schleife oder ein Hindernis stößt und wechselt dann auch wieder zufällig die Richtung. Seine Ladestation findet er, indem er an der Schleife entlangfährt und ganz zum Schluß auf ein spezielles Kabel stößt, das ihn genau in die Ladebucht führt - klappt perfekt. Man kann ein paar Dinge einstellen, wie bspw. die Strecke, die er nach Verlassen der Station gerade zurücklegen soll, bevor er zufällig agiert. Es gibt auch Zusatzkabel, mit denen man ihn zu kniffligen Ecken lenken kann (bei uns sind das die schmalen Terassenverbindungen ). Und: der Garten meiner Eltern liegt an einem Hang (Länge etwa 50m, Breite 15m, Gefälle sicherlich 10m), mit mehreren Terassen und keineswegs ebenen Grasfächen (beileibe kein englischer Rasen ;-), die der Mäher problemlos packt. Nachdem die beiden in die Jahre gekommen sind, ist das Ding eine große Hilfe. Lediglich am Rand muss man ganz wenig per Trimmer entfernen - 98% macht er allein. Ich weiss nicht, wie groß die Leistung des Mähwerkes ist, aber sicherlich unter 20W. Ist aber ok. Da die "Schabe" 24h pro Tag mäht, muss sie ja auch nur 1-2mm pro Durchgang kürzen. Ich würde nicht zu viel Aufwand (GPS etc.) betreiben - der Zufall macht's :-) Chris D.
cyblord ---- schrieb: > Allerdings kommerzielle Mähroboter gibts und die funktionieren gut. In der Tat. Die Frage ist halt, was man von einem Selbstbau erwartet - vollständig autarkes und fehlerfreies Abmähen und Rückkehr zur Ladestation ist gewiss nicht drin bei einem Budget im niedrigen dreistelligen Bereich. Chris D. schrieb: > Ich würde nicht zu viel Aufwand (GPS etc.) betreiben - der Zufall > macht's :-) Oder halt so. Wenn man nur lange genug kreuz und quer navigiert, erreicht man jede Position ;-)
Mark Brandis schrieb: > Und, wieviel macht der aus? Einen Meter Ungenauigkeit auf zehn Meter > Wegstrecke doch wohl kaum, sondern geschätzt eher ein paar Zentimeter. > Damit kann ich zumindest gut leben, und weitere Korrekturen sind > möglich. > > Außerdem sind Rasenflächen üblicherweise nicht zehntausend Quadratmeter > groß und ohne jede Begrenzung und ohne jedes Hindernis (z.B. Baum, > Vogeltränke, Mauer/Zaun zu Nachbars Garten hin etc.) > Wenn mein Sensor mir sagt dass ich eben gerade gegen die Mauer gefahren > bin, die ich erst nach weiteren zehn Zentimetern Wegstrecke erwartet > hätte, dann kann man die Position eben um diese zehen Zentimeter wieder > korrigieren. Du solltest mit deinem Vorschlag einfach zu einem der großen Hersteller gehen, die sind nämlich nicht so klug wie du, von denen ist anscheinend noch keiner aus die Idee gekommen, Odometrie zur Navigation zu nutzen.
gaast schrieb: > Du solltest mit deinem Vorschlag einfach zu einem der großen Hersteller > gehen, die sind nämlich nicht so klug wie du, von denen ist anscheinend > noch keiner aus die Idee gekommen, Odometrie zur Navigation zu nutzen. Wenigstens diskutiere ich über das Thema um das es hier geht, anstatt andere anzupflaumen. Solltest du auch mal probieren.
Mark Brandis schrieb: > Chris D. schrieb: >> Ich würde nicht zu viel Aufwand (GPS etc.) betreiben - der Zufall >> macht's :-) > > Oder halt so. Wenn man nur lange genug kreuz und quer navigiert, > erreicht man jede Position ;-) Ja eben - ich kann bestätigen, dass dieses Prinzip auf jeden Fall funktioniert. Und nein, die Flächen sehen danach nicht "zufällig gemäht" aus - das wird schon gleichmäßig :-) Und man erspart sich da den ganzen Quatsch mit Kompasssensoren, GPS etc. Einfach ist genial - auch heute noch. Chris D.
...und das gemähte Gras bleibt dann einfach liegen? Ich fänds ja auch toll, mir so ein Husquarna Dings zu kaufen, aber da das Mähgut ja auch irgendwie in die Biotonne soll, muss man ja doch wieder den Rasen abgrasen (duh!). Das Fuzzy Prinzip halte ich schon für gut, aber wenn die Dinger keinen Fangkorb haben, ist das eben Quatsch. Dann lieber einen Putzrobotor, der die Küche wischt und ein bisschen Staub saugt :-) Zonk schrieb: > ein gebrauchtes > Schaf (so um die 150 Euro) ROFL - ein gebrauchtes Schaf deswegen, weil es mehr Erfahrung hat?
>...und das gemähte Gras bleibt dann einfach liegen?
Das Prinzip der autonomem Rasenmäher oder besser Rasierer basiert darauf
das der Rasen jeden Tag um ca 1-3mm geschnitten wird und ja, die
Schnippsel bleiben liegen oder fallen normalerweise zwischen den Halmen
direkt zu Boden.
Mit lägerem Rasen funktionieren die autonomen natürlich nicht.
> aber da das Mähgut ja auch irgendwie in die Biotonne soll
Erst den kompostierbaren organischen Abschnitt mühsam entfernen,
dann jedes Jahr Dünger gegen den verhungernden Rasen streuen ?
Dich haben die Marketigfuzzis aber kopmplett eingenordet.
Kein öffentlicher Rasen wird vom Schnittgut befreit und
dann mühsam gedüngt.
In 25 Jahren wird die Rasenfläche halt 10cm höher.
Mark Brandis schrieb: > Wenigstens diskutiere ich über das Thema um das es hier geht, anstatt > andere anzupflaumen. Solltest du auch mal probieren. Dabei solltest du aber auch akzeptieren, dass du nicht alles besser weißt. Das hat mit anpflaumen wenig zu tun.
gaast schrieb: > Dabei solltest du aber auch akzeptieren, dass du nicht alles besser > weißt. Hab ich nirgendwo behauptet. Wenn ich schreibe: "vielleicht" oder "Ich stelle mir das so vor", dann reicht das einem intelligenten Menschen um zu erkennen, dass diese Aussagen keinen Anspruch auf die absolute eherne und endgültige Wahrheit beinhalten.
Würde aber helfen, wenn man schonmal Rasen mähte. Nicht nur auf dem Golfplatz.
Mark Brandis schrieb: > gaast schrieb: >> >> [ ] du hast mein Posting gelesen >> [ ] und verstanden >> >> http://de.wikipedia.org/wiki/Schlupf > > Und, wieviel macht der aus? Einen Meter Ungenauigkeit auf zehn Meter > Wegstrecke doch wohl kaum, sondern geschätzt eher ein paar Zentimeter. Hast du mal ausgerechnet, auf wieviel Grad genau die Richtung passen muß, um z.B. nach 10m nur um 10cm daneen zu liegen? Und der Roboter muß wesentlich mehr als 10m zurücklegen, um den gesamten Rasen zu bearbeiten. > Außerdem sind Rasenflächen üblicherweise nicht zehntausend Quadratmeter > groß und ohne jede Begrenzung und ohne jedes Hindernis (z.B. Baum, > Vogeltränke, Mauer/Zaun zu Nachbars Garten hin etc.) > Wenn mein Sensor mir sagt dass ich eben gerade gegen die Mauer gefahren > bin, die ich erst nach weiteren zehn Zentimetern Wegstrecke erwartet > hätte, dann kann man die Position eben um diese zehen Zentimeter wieder > korrigieren. Und wenn du die Mauer zum richtigen Zeitpunkt triffst, woher weißt du dann, ob du in Querrichtung richtig liegst? Oder wenn du den erwarteten Baum gar nicht triffst, wo bist du dann?
Matthias Sch. schrieb: > ...und das gemähte Gras bleibt dann einfach liegen? Ich fänds ja auch > toll, mir so ein Husquarna Dings zu kaufen, aber da das Mähgut ja auch > irgendwie in die Biotonne soll, muss man ja doch wieder den Rasen > abgrasen (duh!). Wie andere schon schrieben: nein, muss man nicht. Die sehr feinen Schnipsel fallen zwischen die stehenden Halme und werden dort zersetzt. Das klappt jetzt schon über Jahre wunderbar, ohne dass auch nur einmal der Rasen abgeharkt werden musste. > Das Fuzzy Prinzip halte ich schon für gut, aber wenn > die Dinger keinen Fangkorb haben, ist das eben Quatsch. Siehe oben: ein Korb ist unnötig. > Dann lieber einen Putzrobotor, der die Küche wischt und ein bisschen > Staub saugt :-) Das suche ich auch noch - aber der muss eben auch wirklich nah an Objekten Staub aufnehmen, weil in der Wohnung ja doch viele Hindernisse sind (gestern erst wieder bemerkt ;-) - und man möchte ja nicht erst alles hochstellen müssen. Chris D.
Matthias Sch. schrieb: > ...und das gemähte Gras bleibt dann einfach liegen? Gibt es auch in Groß: http://www.mein-schoener-garten.de/de/gartenpraxis/ziergarten/mulchmaehen-spart-zeit-und-geld-31113 Die Schnippsel verrotten einfach. Wir hatten "früher" auch so ein Roboter in der Schule, der ist immer soweit gefahren bis er auf ein Hindernis traf und hat sich dann gedreht, hat auch funktioniert...
Mark Brandis schrieb: > Hab ich nirgendwo behauptet. Wenn ich schreibe: "vielleicht" oder "Ich > stelle mir das so vor", dann reicht das einem intelligenten Menschen um > zu erkennen, dass diese Aussagen keinen Anspruch auf die absolute eherne > und endgültige Wahrheit beinhalten. Vielleicht solltest du es einfach nicht dauernd widerholen, wenn dir mehr als einmal widersprochen wird. Das wirkt irgendwie besserwisserisch.
Ich würde ja eher die Ökologische Variante empfehlen. Das Schaf . Einige Vorteile : * selektives abmähen .so eni Schaf frisst lange nicht alles. Die blumen haben eine chance , nicht wie beim Robomäh bot * es findet alleine zurück zud Ladestation (stall ) * keine teure Ersatzteilbeschaffung für exotische Bauteile * nebenbei fällt noch Wolle ab.
MaWin schrieb: > Erst den kompostierbaren organischen Abschnitt mühsam entfernen, > dann jedes Jahr Dünger gegen den verhungernden Rasen streuen ? Aber nein, ich dünge niemals. Mein Brunnenwasser ist sehr nährstoffreich und da brauchts im ganzen Garten null Dünger.
Ralph schrieb: > Ich würde ja eher die Ökologische Variante empfehlen. > > Das Schaf . Ist das denn wirklich so ökologisch? Kühe sind es ja bekanntlich nicht.
Rolf Magnus schrieb: > Ist das denn wirklich so ökologisch? Kühe sind es ja bekanntlich nicht. Da hast du natürlich recht, eine einfache Rechnung kann das beweisen: Ein Schaf frisst etwa 1 Kg Gras am Tag, also hat unser Schaf einen Schadstoffausstoß von 1,4 Kg CO2 / Tag. Macht 1 Tonne in zwei Jahren... Wir sehen es ist nicht sehr umweltschonend ;)
Rolf Magnus schrieb: > Ist das denn wirklich so ökologisch? Kühe sind es ja bekanntlich nicht. Sind sie nicht? Grund? Fer T. schrieb: > Da hast du natürlich recht, eine einfache Rechnung kann das beweisen: > Ein Schaf frisst etwa 1 Kg Gras am Tag, also hat unser Schaf einen > Schadstoffausstoß von 1,4 Kg CO2 / Tag. > Macht 1 Tonne in zwei Jahren... > > Wir sehen es ist nicht sehr umweltschonend ;) Preisfrage: Was würde passieren, wenn das Gras nicht vom Schaf gefressen, sondern von Mikroorganismen zersetzt würde?
Bei einem Schaf faellt nicht nur Wolle ab sondern auch Kacke. Dafuer braucht es dann wieder einen Roboter der die einsammelt! Ausserdem seit ihr alle sehr miesepetrisch! Natuerlich wird es der OP auch in 2Jahren nicht schaffen ein vollkommen problemlos funktionierenden Maehroboter zu bauen. Und selbst wenn dann war er zehnmal so teuer wie ein gekaufter. Aber wenn er das Projekt zwei Monate verfolgt und dann beerdigt hat er trotzdem eine Menge dabei gelernt. Ich denke manchmal der Grund warum die 'Jugend von heute' eine gewisse Tendenz zur technischen Unfaehigkeit hat ist das Internet wo ihr alles ausgeredet wird. Ich hab als Schueler auch eine Menge Mist gebastelt. Mittlerweile aber werden die meisten von euch schonmal ein Glas Wasser getrunken haben das mit einem Messgeraet von mir getestet wurde. .-) Olaf
gaast schrieb: > Sind sie nicht? Grund? Sie stoßen extrem viel Methangas aus, was bekanntlich das schlimmste Treibhausgas ist (nach FCKW/FKW). http://de.wikipedia.org/wiki/Tierproduktion#Globale_Erw.C3.A4rmung > Globale Erwärmung > Hinzu kommt, dass die Tierproduktion wesentlich mehr Treibhausgase emittiert als die Pflanzenproduktion. > Der weitaus größte Anteil an den Treibhausgasemissionen innerhalb der Tierproduktion besteht aus Lachgas und Methan und ist auf die Verdauung der Tiere (Mist und Pansengärung) zurückzuführen; Futtermittelproduktion und Kraftstoffverbrauch sind relativ unbedeutend. gaast schrieb: > Preisfrage: Was würde passieren, wenn das Gras nicht vom Schaf > gefressen, sondern von Mikroorganismen zersetzt würde? Immernoch, aber weniger CO2, weil mehr Kohlenstoff im Kompost gebunden würde... MfG
Fer T. schrieb: > Rolf Magnus schrieb: >> Ist das denn wirklich so ökologisch? Kühe sind es ja bekanntlich nicht. > > Da hast du natürlich recht, eine einfache Rechnung kann das beweisen: > Ein Schaf frisst etwa 1 Kg Gras am Tag, also hat unser Schaf einen > Schadstoffausstoß von 1,4 Kg CO2 / Tag. > Macht 1 Tonne in zwei Jahren... Bei den Kühen war ja weniger das CO2 das Problem, sondern eher das Methan und das Lachgas, weil das die Ozonschicht viel stärker angreift.
Fer T. schrieb: > Immernoch, aber weniger CO2, weil mehr Kohlenstoff im Kompost gebunden > würde... Quelle?
Das vom Schaf erzeugte CO₂ ist kein Problem, da dessen Menge maximal der Menge CO₂ entspricht, die das gefressene Gras beim Wachsen vorher schon aufgenommen hat. In Summe bleibt der CO₂-Anteil in der Luft also gleich. Wie schon geschrieben wurde, besteht das eigentliche Problem in dem von den Wiederkäuern erzeugten Methangas (CH₄), das je nach Quelle um den Faktor 21 bis 23 klimaschädlicher als CO₂ ist.
Methan und Lachgas entstehen allerdings grundsätzlich auch beim verotten direkt am Rasen oder bei der Kompostierung.
Yalu X. schrieb: > Wie schon geschrieben wurde, besteht das eigentliche Problem in dem von > den Wiederkäuern erzeugten Methangas (CH₄), Kann man das nicht so lösen? http://de.wikipedia.org/wiki/Abfackelung :)
Rolf Magnus schrieb: > Hast du mal ausgerechnet, auf wieviel Grad genau die Richtung passen > muß, um z.B. nach 10m nur um 10cm daneen zu liegen? Und der Roboter muß > wesentlich mehr als 10m zurücklegen, um den gesamten Rasen zu > bearbeiten. Meinst Du:
? > Und wenn du die Mauer zum richtigen Zeitpunkt triffst, woher weißt du > dann, ob du in Querrichtung richtig liegst? Oder wenn du den erwarteten > Baum gar nicht triffst, wo bist du dann? Ein Roboter, der jede Stelle nur einmal überfährt, weil er perfekt navigiert, wäre gewiss toll. Wie aber weiter oben durch Chris D. beschrieben, ist das gar nicht nötig. Zum Glück. Sonst würden die Husqvarna Mähroboter wohl eher das Doppelte oder Dreifache kosten.
Irgendwie macht ihr mir gerade Lust auch einen zu bauen xD Das ganze: "Geht nicht", "zu teuer", "unmöglich" Es muss doch auch für einen Hobbybastler zu lösen sein :D Mähwerk ist ja nicht das Problem, das sollte man relativ schnell hin bekommen, Notstoppen sollte auch gehen. Viel schwieriger (was mir zu denken gibt) ist, wie man die Navigation hin bekommt. Eine Mauer um alle Hindernisse bauen und mit Schaltern dann als Sensoren zu arbeiten hat keinen Sinn, GPS ist für den Hobbybastler zu teuer, einen Draht verlegen ginge, aber der Strom der dort durchfließen muss, um vom Roboter gemessen zu werden (Magnetsensor / Hall) wäre relativ hoch. Alternativ bliebe 3 Funksender im Garten zu verteilen und die Position mittels Triangulation zu berechnen, was aber evtl. zu ungenau ist um die Rosen zu schützen ;) Naja wo ein Problem ist, dort ist auch eine Lösung ;D MfG
Fer T. schrieb: > Alternativ bliebe 3 Funksender im Garten zu verteilen und die Position > mittels Triangulation zu berechnen, was aber evtl. zu ungenau ist um die > Rosen zu schützen ;) Man köpnnte auch versuchen, mittels mehrerer IR-Sendebaken eine Triangulation zu erreichen. Ähnlich dem System, das in der Flugnavigation benutzt wird. Bei 0° wird ein Rundumpuls losgeschickt und eine drehende LED mit engem Kegel (1 Umdrehung ist zb 10 Sekunden) an der Station ermöglicht dann aus der Zeitdifferenz zwischen den Pulsen den Winkel zu bestimmen, auf dem man sich in Relation zum IR-Feuer befindet. Schwierig wird die verschiedenen Frequenzen auseinander zu halten. > Naja wo ein Problem ist, dort ist auch eine Lösung ;D Die käuflichen fahren m.W. einfach kreuz und quer. Wobei ich mich immer gefragt habe, wie die wieder zur Ladestation zurückfinden. Ich denk mir: So ungefähr wissen sie durch Odometrie, wo sie sind. Und am letzten Stück werden sie durch einen IR-Strahl geführt.
Karl Heinz Buchegger schrieb: > Die käuflichen fahren m.W. einfach kreuz und quer. Wobei ich mich immer > gefragt habe, wie die wieder zur Ladestation zurückfinden. Man muss den Bereich mit Draht abstecken, die "Spule" wird dann mit HF von der Basis befeuert. Man folge dem Draht einfach so lange bis man bei der Basis steht.
Fer T. schrieb: > Immernoch, aber weniger CO2, weil mehr Kohlenstoff im Kompost gebunden > würde... Aha, und die Sch.. vom Schaf geht vollständig in die Luft > Irgendwie macht ihr mir gerade Lust auch einen zu bauen xD > Das ganze: "Geht nicht", "zu teuer", "unmöglich" > Es muss doch auch für einen Hobbybastler zu lösen sein :D Du stehst ja mit beiden Beinen voll im Leben... Leute gibt es.
Die Idee mit dem IR-Strahl ist nicht schlecht, aber bei mir z.B. wäre es schwer umzusetzen, da mitten im Garten ein Baum mit Blumen drumm steht ;) Der würde den Strahl unterbrechen und so hinter dem Baum keine Ortung zulassen... Bei freien Gelände jedoch wäre das durchaus eine gute Möglichkeit :D Funk hat aber auch das Problem, wie unterscheide ich 3-4 Signale? Aber vor allem: Wie bekomme ich die Zeitdifferenz zwischen senden und empfangen, um daraus die Entfernung zu berechnen und dann mittels Schnittpunkt der Radien den exakten Aufenthaltspunkt zu bekommen? Noch schwerer wird sein eine so kleine Differenz zu messen wie auf z.B. 10cm entsteht (Schall wäre einfacherer...). Naja Gehirn muss jetzt erst mal arbeiten ;) MfG PS: @ Landwirt: War eine grobe Schätzung, keine Ahnung wie viel Dung im Vergleich zu Kompost entsteht, ich würde aber schätzten, dass das Schaf mehr Kohlenstoff in CO2 umsetzt als in Dung.
Gerald *. schrieb: > Karl Heinz Buchegger schrieb: >> Die käuflichen fahren m.W. einfach kreuz und quer. Wobei ich mich immer >> gefragt habe, wie die wieder zur Ladestation zurückfinden. > > Man muss den Bereich mit Draht abstecken, die "Spule" wird dann mit HF > von der Basis befeuert. Man folge dem Draht einfach so lange bis man bei > der Basis steht. Das deckt sich allerdings nicht mit der Vorgehensweise, die ich bei den mir bekannten Rasenrobots beobachtet habe. Zur Ladestation fahren die relativ zielgerichtet in die richtige Richtung.
Fer T. schrieb: > Die Idee mit dem IR-Strahl ist nicht schlecht, aber bei mir z.B. wäre es > schwer umzusetzen, da mitten im Garten ein Baum mit Blumen drumm steht > ;) > Der würde den Strahl unterbrechen und so hinter dem Baum keine Ortung > zulassen... Mehrere 'Funk'-feuer einsetzen. Du musst mindestens 2 'sehen' können. Es dürfen auch mehr sein. > Bei freien Gelände jedoch wäre das durchaus eine gute Möglichkeit :D > Funk hat aber auch das Problem, wie unterscheide ich 3-4 Signale? Funk ist leicht. Unterschiedliche Frequenzen. > Aber vor allem: Wie bekomme ich die Zeitdifferenz zwischen senden und > empfangen, um daraus die Entfernung zu berechnen und dann mittels > Schnittpunkt der Radien den exakten Aufenthaltspunkt zu bekommen? Du hast das Prinzip noch nicht: In der Sendestation ist eine drehbare Sendeeinheit und eine fixe. Die drehbare sendet in einem engen Kegel. Die fixe sendet rundum. Weiters ist bekannt: Die drehbare braucht zb 1 Minute für eine volle Umdrehung (ist zb bei Flugverkehr so). Im Empfänger hast du 2 Empfangseinheiten. Wenn die für den Rundumpuls anschlägt, lässt du eine Uhr laufen. Die Uhr wird gestoppt, wenn der Puls von der drehbaren Einheit kommt. Die Zeit zwischen den beiden Pulsen ist ein direktes Mass dafür, wie der Winkel zur Station ist. Und da die Station den Rundumpuls immer dann abgibt, wenn der drehbare Strahl auf absolut 0° ist, hat damit der Empfänger auch ein direktes Mass dafür, wie sein absoluter Winkel (in einem genordeten Koordinatensystem) zur Station ist. Ist die Zeitdifferenz 15 Sekunden, dann ist der Empfänger genau östlich (auf 90°) zum Sender. Ist die Zeitdifferent 30 Sekunden, dann ist er genau nördlich (auf 0°), ist sie 45 Sekunden, dann ist er genau westlich (auf 270°) zum Sender. D.h. du misst nicht die Zeitdifferenz zwischen Senden und Empfangen, sondern die Zeitdifferenz zwischen 2 Pulsen vom Sender, die in einer bestimmten Winkel- / Zeitbeziehung stehen. Man könnte zb 5 Stationen auf den gleichen Frequenzen einsetzen. Mit dem Rundumpuls sendet jede Station eine Kennung mit, damit der Empfänger weiß, wen er gerade empfängt. Und natürlich müssen sich die Sender abwechseln. Aber persönlich denke ich, das ist alles zu aufwändig.
Was spricht dagegen, die Navigation auszulagern? Installiere an einer erhöhten Stelle eine oder mehrere Webcams, die den Roboter beobachten und so seine Position bestimmen. Kostet keine 100 EUR für 2-3 Webcams, entsprechende Bildverarbeitungs-Frameworks findet man im Internet und als ganz grosser Vorteil kannst du die Datenverarbeitung auf dem PC machen
Karl Heinz Buchegger schrieb: > Du hast das Prinzip noch nicht: Nein deine Idee habe ich durchaus verstanden, mit dem Licht ist das einfach, ist ja das Leuchtturm Prinzip: Strahl Richtung Norden -> Rote Lampe leuchtet auf. Nun dreht sich der Strahl um 360° in x Sekunden daraus schließe ich auf den Winkel den ich zum Leuchtturm habe. Meine Fragen bezogen sich auf die Funk Variante... Dort ist auch ein gebündelter Strahl relativ schwer, weil sich Funk ja relativ weit ausbreitet... Danke, ist aber echt evtl. etwas viel Aufwand im Vergleich zu 10 Minuten Rasen mähen... ;) MFG PS: @P.M.: Wäre auch eine Idee, muss mal drüber nachdenken :D
Karl Heinz Buchegger schrieb: > Das deckt sich allerdings nicht mit der Vorgehensweise, die ich bei den > mir bekannten Rasenrobots beobachtet habe. Zur Ladestation fahren die > relativ zielgerichtet in die richtige Richtung. Das ist natürlich nur eine der Möglichkeiten. Bei den Staubsaugroboter sendet die Basis IR Leitstrahlen aus um zu Basis zurück zu finden und Barrieren werden auch per IR gebildet.
Hallo zusammen, das mit dem drehenden Signal klingt interessant. Allerdings muss dann der Robi relativ lange warten bis er seine Position bestimmt hat. Er muss ja mindestens 2 Signale bestimmen, also bis zu 2 Minuten. Vorschlag: mehrere frequenzmodulierte IR-Signale als Rundumstrahler im Garten positionieren und der Robi bekommt eine drehende Empfangseinheit. Wenn er ein Signal empfängt, muss er dessen Frequenz bestimmen und schon weiß er von welchem Leuchtturm es kommt. Mit nur einer Drehung seiner Empfangseinheit hat er alle sichtbaren Signale erfasst. An so einem elektrischen Schaaf hätte ich ja auch interesse, allerdings hab ich keine Lust die Signalschleife zu verbuddeln. Hoffentlich bringt Samsung bald eine Gestensteuerung für Rasenmäher statt für Fernseher: Das Ding einmal um den Rasen tragen, an Stellen wo er auspassen soll etwas schütteln und den Rest macht der Robi. Harri
> Bei einem Schaf faellt nicht nur Wolle ab sondern auch Kacke. Dafuer > braucht es dann wieder einen Roboter der die einsammelt! Dafür könnte man Mistkäfer aussetzen.
Karl Heinz Buchegger schrieb: > Gerald *. schrieb: >> Karl Heinz Buchegger schrieb: >>> Die käuflichen fahren m.W. einfach kreuz und quer. Wobei ich mich immer >>> gefragt habe, wie die wieder zur Ladestation zurückfinden. >> >> Man muss den Bereich mit Draht abstecken, die "Spule" wird dann mit HF >> von der Basis befeuert. Man folge dem Draht einfach so lange bis man bei >> der Basis steht. > > Das deckt sich allerdings nicht mit der Vorgehensweise, die ich bei den > mir bekannten Rasenrobots beobachtet habe. Zur Ladestation fahren die > relativ zielgerichtet in die richtige Richtung. Es gibt (zumindest bei Husquarna) noch "Sonderdrähte" mit offenem Ende, die direkt zur Station führen. Ansonsten tastet er sich eben am Rand der Schleife zurück - das ist auch zielgenau :-) Ist auf jeden Fall verblüffend, wie gut und vor allem zuverlässig das funktioniert. Eine Möglichkeit, die ich mir auch noch vorstellen könnte, wäre RFID - wenn man damit alle paar Meter ein "Leuchtfeuer" erzeugt, hätte der Mäher die Möglichkeit, sich wieder halbwegs zu justieren. Chris D.
Gut, mit den ligengebliebenen Rasen schnipseln habt ihr überzeugt, die können also liegenbleiben. Aber wenn das ganz kurze Schnipsel sein sollen (gleiche Höhe des Mähwerks über Grund mal vorrausgesetzt) dann muss der Robbi quasi immer aktiv ein? Also an irgendeiner Stelle ist er immer am rummachen? Hmm, das widerspricht allerdings meiner Vorstellung von Gartenruhe :-) Ich hatte sowas auch schon mal in der Mache, als Mähwerk eine Akkuschere und als Lafette ein robuster Fernsteuerpanzer. Ich hatte einen drehbaren Sharp GP2D02 als Entfernungsmesser eingeplant und IR Anpeilung der Ladestation, die wie ein Autoscooter funktionierte - Antenne Pluspol und an der Stossstange Minus. Der Kontroller sollte bei mir der uCSimm mit Linux sein. Ürsprünglich sollte mittels Entfernungsmesser und Odometer eine Karte der Umgebung angelegt werden. Allerdings, wie bereits erwähnt, ist der Schlupf untragbar. Entweder als doch Fuzzy System, oder die GPS/GLONASS/Galileo Variante mit elektr. Kompass. War mir aber zu aufwendig.
Hallo, ich hab zwar nicht vor einen Rasenmäher zu bauen, aber was haltet ihr von einer Steuerung, wie bei dir WII? Überall im Garten IR-LED's aufstellen, sodass von überall mindestens 2 IR-LED-spots zu sehen sind. Diese können blinken und die Blinkfrequenz (meinentwegen auch das Blinkmuster) codiert gleichzeitig die LED-Station. Damit können dann die Stationen auseinandergehalten und die Positionen genau bestimmt werden. Auf dem Rasenmäher müsste dann eine WII-Fernbedienung sein, die eben die IR-LED's "sieht" und per Bluetooth an einen Computer (oder auf dem Rasenmäher selber,z.B. ein Netbook) überträgt. Dort könnte die Position bestimmt werden und per Funk zurück an den Rasenmäher geschickt werden (oder eben das Netbook). Verbotene Bereiche können dann einfach am Computer/Netbook eingetragen werden, dann müsste nur das Netbook/Computer ebenfalls die Steuerung übernehmen( nach dem Motto: ich weiß, dass du an der Stelle (x/y) bist, dann fahr jetzt 5m geradeaus und dann 2m nach links... Ich denke, dass das "relativ" einfach zu realisieren wäre, da a) die Wii-Fernbedienung recht leich über Bluetooth ausgelesen werden kann und b) die Steuerung über einen Computer passieren könnte, was das ganze recht leicht macht. Probleme könnte die Sonne sein. Dann kann man halt nur im Dunkeln mähen ;-) Viele Grüße Christoph
Für den Draht, 9V oder 12V ac dürften doch problemlos gehen, mit drei Transistoren einen Berührungslosen AC Spannungsdetektor aufbauen, und das kann man dann problemlos detektieren werden. Da braucht man auch nichts modulieren, auch wenn das möglich wäre um so mehrere Schleifen auseinander zu halten.
Matthias Sch. schrieb: > Gut, mit den ligengebliebenen Rasen schnipseln habt ihr überzeugt, die > können also liegenbleiben. Aber wenn das ganz kurze Schnipsel sein > sollen (gleiche Höhe des Mähwerks über Grund mal vorrausgesetzt) dann > muss der Robbi quasi immer aktiv ein? Also an irgendeiner Stelle ist er > immer am rummachen? > Hmm, das widerspricht allerdings meiner Vorstellung von Gartenruhe :-) Also ich habe seit vielen Jahren einen Automower von Husqvarna und bin mehr als zufrieden. Im Familien- und Bekanntenkreis ist der "Virus" daher auch schon mehrfach übergesprungen. Das mit dem "dauernden" Mähen muss man nicht so wörtlich nehmen. Die Mäher sind mit einer Flächenleistung angegeben, z.B. 3000m². D.h., der Mäher könnte 3000m² schaffen, wenn er ununterbrochen 24h aktiv ist - Laden und Mähen. Die Ladezeit ist also inbegriffen. Wenn man jetzt z.B. "nur" 500m² hat, dann muss der Mäher täglich nur 4h laufen, inklusive Ladezeit. Man kann jetzt z.B. auch nur alle 2 Tage mähen lassen, dann mit der doppelten Zeit. Wenn man nach dieser Formel berechnet, ist das Mähergebnis sehr gut, nach etwas Erfahrung kann man auch diese Zeit noch verkürzen. Das Ergebnis zeigt sich immer recht schnell und man bekommt schnell den Bogen raus. Ich mähe (besser: lasse mähen) nur alle 2 Tage und dann auch nur Vormittags, wenn keiner zu Hause ist. Am Wochenende überhaupt nicht. Kein Poblem mit sichtbaren Rasenschnitt oder an den Schuhen.
Beim Husqvarna wird für das Schleifensignal einer digitaler Form übertragen, damit ist der Mäher an diese Fläche gekoppelt. Das macht Sinn, wenn man mehrere Flächen direkt nebeneinander betreibt (z.B. bei großen Anlagen). Das Mäher fährt dann niemals aus Versehen in die andere Fläche. Der Code wird beim Pairing vom Mäher in die Ladestation übertragen, bei Husqvarna durch eine Pulsung des Ladestroms, dann kann der kleine PIC in der Ladestation diesen zuvor im Mäher vorgegebenen Code einlernen. Ich habe mir das nicht haargenau angeschaut, aber in die äußere Schleife wird wirklich direkt das Rechtecksignal zu eingespeist, welches durch Befilterung etwas in den Flanken entschärft wird. Die zwei Spulen im Mäher vorne und hinten empfagen dieses Signal laufend - auch an einem beliebigen Punkt innerhalb der Fläche (kann man mit einfachen Test auch belegen). Wenn jetzt die vordere Spule, welche senkrecht steht, in die Nähe des Drahtes kommt wird das Signal größer. Genau über dem Draht wird das Signal Null. Über Überfahrung wird das Signal gegenüber der hinteren noch im Feld befindlichen Spule 180° phasenversetzt. Damit weiß der stets, ob er sich innerhalb des Feldes befindet. Eine genaue Ortung halte ich für überflüssig, weil es neben dem Zufallsmodus noch den Rechteckmodus gibt: Wenn der Mäher an einer Stelle erhöhten Kraftaufwand feststellt (Motorstrom), dann fängt er an dieser Stelle in einem immer größer werdenden Rechteck in Schneckenform diese Stelle auszumähen - und zwar solange, bis er wieder an eine Grenze oder ein Hinderniss stößt. Das Rechteckt vom Startpunkt aus gesehen wird natürlich recht schnell "unförmig". Das macht aber nichts, weil der Mäher das wiederrum durch den Zufallsmodus wettmacht. Eine genaue Ortung würde ganz andere Probleme bringen, Stichwort Reflektion und Abschattung. Und was soll der erhöhte Auswand bringen? Man schaue sich das Egebnis eines Husqvarnas an (Sabo und Gardena sind ebenfalls mit Husqvarna-Technik oder gar Innenleben) und urteile dann über die Notwendigkeit einer Ortung.
Noch ein Vorschlag: Für das Schleifensignal einfach die Platine der Ladestation kaufen oder bei einem Händler nach einer gebrauchten/ausgesonderten Platine fragen. Das Orginal kostet so um die 50 Euro, dafür hat man dann diese Baustelle direkt funktionierend erschlagen. Für den Betrieb braucht es nur 24V AC und einen bis zu 500m langen Draht und fertig. Die Ladeschaltung ist übrigens im Mäher, auf der Platine der Ladestation werden die 24V direkt durchgereicht (über einen Shunt geführt zwecks oben beschriebener Pulserkennung). Ich denke, das wäre die einfachste Möglichkeit, die Baustelle Schleife abzuhaken. Über die genaue Signalcodierung braucht man sich für ein Selbstbau-Projekt ja keine Gedanken machen, es kommt ja nur auf Phasendrehung an. Wenn man eine einfache Drossel mit Ferritkern über den Draht hält kann man das Signal schon mit dem Oszi sehen und man kann sich Gedanken zur Verstärkung machen.
> Also an irgendeiner Stelle ist er immer am rummachen?
Im Prinzip tut er das - beim Nachbarn einer Freundin.
Allerdings nur in Wachstumsphasen und wenn es zufälligerweise gerade mal
nicht regnet oder Nacht ist.
Daher ist der Rasen auch nicht gemäht, sondern nur plattgefahren, die
Dinger sind einfach zu blöd, fahren hundertmal über eine Stelle bevor
sie der Zufall mal auf eine noch nicht gemähte lockt.
Zur Orientierung: Eine Kamera die die Rasenfläche beobachtet kann nicht
im Zenrtrum obendrüber montiert werden, sondern guckt schräg von der
Seite, sehr schräg bei grossem Garten. Da wird die Winkelauflösung der
handelsüblichen Kameras schon unzureichend, um den Robbi noch auf besser
als 10 Zentimeter führen zu können.
Eine Kamera auf dem Robby selbst, die rundum guckt, sollte für die
Orientierung viel besser sein. Direkt nach oben in den Himmel braucht
sie nicht gucken, aber wenn sie ständig Objekte am Rand der Rasenfläche
beobachtet (Baumstamm, Kante Hauswand, Pylon einer Gartenlampe), sollte
ein Algorithmus per Triangulation in der Lage sein, die Lage
zentimetergenau zu bestimmen, man muß nur überlegen wie sie bei
schwankender Helligkeit die relevanten Objekte fokussiert hält.
Dann wäre der Robbi alleine als praktische Algorithmusdemonstration ganz
nett. Rasen mäht man lieber per Hadn, geht mit 7.5PS einfach schneller.
Hmm, wie funktioniert das dann wenn man mehrere "Blumen-Inseln" auf der Rasenfläche hat, die nicht gemäht werden dürfen. Ich kann zwar vom Rand mit dem Begrenzungskabel an die Insel fahren und drum herum, aber dann ist an dieser Stichleitung quasi eine Grenze mitten auf dem Rasen verlegt. Hat da jemand schon mal Erfahtungen damit gemacht?
Das ist einfach: Bei einer Insel im Garten geht man vom Rand dorthin, einmal rum, und parallel zur ersten Leitung wieder zum Rand zurück. Das Feld der parallel verlaufenden Leitung hebt sich auf (Bifilar).
MaWin schrieb: > Im Prinzip tut er das - beim Nachbarn einer Freundin. > Allerdings nur in Wachstumsphasen und wenn es zufälligerweise gerade mal > nicht regnet oder Nacht ist. > Daher ist der Rasen auch nicht gemäht, sondern nur plattgefahren, die > Dinger sind einfach zu blöd, fahren hundertmal über eine Stelle bevor > sie der Zufall mal auf eine noch nicht gemähte lockt. Kann ich für den Husqvarna nicht bestätigen: - Nur in den Wachstumsphasen? Warum? - Regen: Trägt eher noch zum Schnittbild bei: Unser fährt auch bei (Stark-)Regen - Nacht: Ist alles per Timer einstellbar. - Plattgefahren? Bei uns definitiv nicht. - Hundertmal über eine Stelle: Definitiv nicht, dafür gibt es Ausfahrtswinkel und Schleife bei Ausfahrt folgen: Alles programmierbar in Prozentangaben (bei eher schwierigen Flächen erforderlich) MaWin schrieb: > Rasen mäht man lieber per Hadn, geht mit 7.5PS einfach schneller. Also mein Zeitaufwand sind nur wenige Minuten im Jahr für den Messertausch. Kann man das mit einem großen Motor toppen?
Weiß jemand ca wieviel Strom in die Schleife gepumpt wird und wieviele Windungen die Spulen am Mäher haben? mfg
Suche mal nach folgenden Begriffen 230 acx platine Ladestation und 230 acx schleifensensor Der Strom für die Schleife dürfte einige 10..100mA nicht überschreiten. In den Bildern sieht man den Aufbau des Schleifengenerators und die Empfangsspule in ihrer Einfachheit. Das ist eine recht primitive handelsübliche Spule mit ein paar passiven Bauteilen kombiniert. Beim SOT-23 Gehäuse habe ich noch nicht analysiert, ob es ein Transistor oder eine (Doppel-)diode ist.
oke schrieb: > Wieviel Windungen die Spule wohl hat. Windungen sind ja relativ egal, vom aufgedruckten Wert her sollten das 100mH sein.
Harald schrieb: > oke schrieb: >> Wieviel Windungen die Spule wohl hat. > > Windungen sind ja relativ egal, vom aufgedruckten Wert her sollten das > 100mH sein. Uq = -N * dphi/dt Ich meine nur die Windungszahl ist von Bedeutung, in dieser Anwendung.
Wieso sollte die Windungszahl von Bedeutung sein? Die Spule dient doch nur als detektor da ist die Windungszahl relativ wurscht... MfG
Im nachgeschalteten Verstärker wird immer schön gegen Poller gefahren, von daher würde ich mir da keinen Kopf machen.
Hallo zusammen, warum wird so etwas eigentlich immer öfter hier diskutiert ? Weiß der Threadersteller und Ihr nicht das es extra hierfür ein Forum gibt ? http://www.roboternetz.de/community/forums/57-Staubsaugerroboter-Reinigungs-und-Rasenm%C3%A4hroboter Bernd_Stein
Hi >warum wird so etwas eigentlich immer öfter hier diskutiert ? Weil hier mehr los ist. >Weiß der Threadersteller und Ihr nicht das es extra hierfür ein Forum >gibt ? Das hat aber nicht die alleinige Hoheit über dieses Thema. MfG Spess
Ich glaub so ein Roboter ist ein unsinniges Projekt, wenn man das gute Stück wirklich brauch. Aber super als Spielwiese um sich technisch auszutoben und aus den vielen Fehlschlägen ein super Entwickler/Konstrukteur zu werden.
> warum wird so etwas eigentlich immer öfter hier diskutiert ?
Was fuer eine selten daemliche Frage. Ich koennte jetzt zurueckfragen
wieso hier ueberhaubt diskutiert wird, schliesslich gibt es schon immer
d.s.e.
Olaf
Der OP hat offensichtlich hier sowieso fertig: (vergleiche mit 1. Text), Beitrag könnte geschlossen werden. http://www.roboternetz.de/community/threads/58383-Rasenroboter-selber-bauen-Hab-noch-Fragen-zum-Schaltplan-und-zum-Laderegler
Harald schrieb: > Der OP hat offensichtlich hier sowieso fertig: (vergleiche mit 1. Text), > Beitrag könnte geschlossen werden. Das ist aber nicht das entscheidende Kriterium. Es kann ja noch andere Benutzer geben, die sich gerne über das Thema austauschen wollen. Bei längeren Threads dürfte das fast sogar eher die Regel als die Ausnahme sein.
Hallo Mark, Bin ganz deiner Meinung, das ist normalerweise ein ganz legitimer Vorgang. Der OP hat sich aber - zumindest unter seinem ersten Namen - nie wieder gemeldet.
Mark Brandis schrieb: > Meinst Du: Genau. Ein halbes Grad Genauigkeit ist aber eben utopisch. >> Und wenn du die Mauer zum richtigen Zeitpunkt triffst, woher weißt du >> dann, ob du in Querrichtung richtig liegst? Oder wenn du den erwarteten >> Baum gar nicht triffst, wo bist du dann? > > Ein Roboter, der jede Stelle nur einmal überfährt, weil er perfekt > navigiert, wäre gewiss toll. Wenn man nach dem Zufallsprinzip vorgeht, wird das alles natürlich sehr viel einfacher. Ich wollte dir zeigen, daß eine genaue Navigation auf dem Rasen nicht ganz so einfach ist, wie du es dir vorstellst.
Harald schrieb: > Der OP hat offensichtlich hier sowieso fertig: (vergleiche mit 1. Text), > Beitrag könnte geschlossen werden. > > http://www.roboternetz.de/community/threads/58383-Rasenroboter-selber-bauen-Hab-noch-Fragen-zum-Schaltplan-und-zum-Laderegler > Mittlerweile finde ich, ist dies das beste Forum in Sachen händling. Ich suche meistens speziell in diesem Forum, wenn es um Mikrocontroller und Elektronik geht. Jetzt finde ich es äusserst schade das auch dieses Forum zugemüllt wird. Denn das oben genannte Roboter Forum ist schon stark vermüllt, da die meisten Threads dort von Leuten kommen, die kein wirkliches Interesse haben bzw. nur ein oberflächliches. Dieser ganze Thread interessiert den Gast Alexander auch gar nicht mehr, da seine Fragen ungenügend beantwortet werden. > > Was haltet ihr davon? > Ist natürlich eine Frage auf die jeder Antworten kann, wie man liest. > > Was sagt ihr zu den Schaltungen auf der Seite? > Ist hier jemand auf diese Frage eingegangen ? Ich denke nicht, denn dann müsste er ja zumindest ein oberflächliches Interesse an RMR haben und sich die Sache zumindest mal ansehen und sich Gedanken darüber machen. > > Hat vielleicht jemand diesen Roboter schon nachgebaut? > Die Frage ist natürlich völlig unbeantwortet geblieben. In einem eigens für diesen Zweck errichtetem Forum, wäre eine Antwort hierauf wahrscheinlicher als hier im Mikrocontroller.net > > Kennt ihr weitere Schaltungen für Rasenroboter?? > Auch bei dieser Frage braucht man wahrscheinlich mehr Glück in diesem Forum als im eingens für diesen Zweck errichteten. Warum also lasst Ihr es zu das auch dieses wunderbare Forum ( Mikrocontroller.net ) zusätzlich mit Threadleichen von denen vermüllt wird, die ihre eigene Mülldeponie haben ? Denn wenn ich mal wieder etwas suche, suche ich auf Müllhalden und merke erst zum Schluß das, das meiste, was ich gefunden habe nicht sinnvoll zu gebrauchen ist. Wer also am Müllsammeln seine Freude hat, kann ja hier weiter diskutieren. Allen anderen die in erster Linie interesse an Robotern haben empfehle ich das hier : http://www.roboternetz.de/ Bernd_Stein
Lieber Bernd, es sind vor allem auch Leute wie du die die Threads "zumüllen". Was hast du deinen Beiträgen in diesem Thread denn bitte zum Thema beigetragen? Wie oft hast du das Wort Müll in deinem letzten Posting benutzt? Daß hier nicht nur exakt auf eine Frage irgendwie geantwortet wird, sondern die Sinnhaftigkeit der Herangehensweise des TOs hinterfragt wird ist eine der großen Stärken des Forums! Deine Schleichwerbung für andere Foren ist jämmerlich, das kannst du dir sparen, du hättest wenn schon konkrete Beiträge dort in denen wichtige Dinge zum Thema gesagt wurden verlinken können. Also ab jetzt zum Thema posten oder Klappe halten.
Rolf Magnus schrieb: > Wenn man nach dem Zufallsprinzip vorgeht, wird das alles natürlich sehr > viel einfacher. Ich wollte dir zeigen, daß eine genaue Navigation auf > dem Rasen nicht ganz so einfach ist, wie du es dir vorstellst. Okay, ist akzeptiert.
Eine Frage für den Besitzer des Husquarna Mähroboter. Wird dort eine RF Verbindung (<400khz vermute ich) gemacht oder nicht ? Aus einigen Textpassagen sowie beschreibung einiger Servicemenüs könnte man darauf schließen. Wenn es so wäre, dann würde es der Odometrie helfen, es wäre zumindest eine hochgenaue Entfernungsmessung der Position ausgehend von der Basisstation.
> es wäre zumindest eine hochgenaue Entfernungsmessung > der Position ausgehend von der Basisstation. Du meinst, meine DCF77-Uhr weiß auch genau wie weit weg es von Mainflingen ist ?
Nein, kein RF Signal. Meinst Du das N und F Signal zum Auffinden der Ladestation? Das (F)ern Signal und das (N)ah Signal sind zwei verschieden große Spulen in der Bodenplatte, welche ebenfalls vom Signalgenerator in der Ladestation bedient werden. Das Fernsignal hat eine Reichweite von einigen Metern und wirkt auf einen Sensor im Roboter. Ich hatte das schon einmal nachgeschaut aber leider vergessen. ich glaube es war ein Magnetfeldsensor, der durch ein Wechselfeld angeregt wird. Wird das Signal größer, so nähert er sich der Station. Wird es schwächer, so entfernt er sich. Das Nahsignal ist etwas anders gestaltet, es dient der Navigation für die letzten cm zum exakten Einparken. Habe ich nicht überprüft, aber wahrscheinlich ist es so, dass sich das Wechselsignal genau aufhebt, wenn er mittig fährt. Es gibt auch sonst keine RF Verbindung, kann ich mit Sicherheit sagen. Die Nähe des F Signals findet er entweder kurzfristig zufällig, oder er orientiert sich anhand des Begrenzungskabels oder des Suchdrahtes. Kann man je nach Bedingungen einstellen. Der Suchdraht ist übrigens kein offener Draht wie weiter oben angegeben sondern immer ein mehr oder weniger mittig verlaufender Draht, welcher als Anzapfung im Außendraht endet. Der Stromfluss wird umgeschaltet, so dass sich im Falle des Suchdrahtes ein gedachtes verkleinertes Feld ergibt. Die Codierung des Signals lässt dem AM wissen, um welches Feld es sich gehandelt hat.
Danke für die Antwort. Zur Funkuhr, die weiss nicht wie weit entfernt sie vom Sender ist, aber wenn man ein temperaturkorrigiertes (SW) Quarz hat und eine Syncronisation zur Basisstation hat, dann weiss man wie weit (ca 6cm Auflösung) man von der Basisstation entfernt ist. Wenn man aber ein GPS hat, dann kann man messen, wie weit man von der Sendeanlage entfernt ist. Damals, als es das Schweizer Signal noch gab, funktionierte eine reine Laufzeitmessung zuverlässig, die Zeiten sind aber leider vorbei. In der heutigen Zeit braucht man schon eine GPRS Verbindung, um ohne GPS eine Position zu haben.
Ist schon mal jemand im Sommer über die Wiese gerannt und hatte dann ne Klinge im Fuß ? Nein? Ich hatte es schon... sehr unangenehm... Nein, ich hab keinen Rasenroboter gebaut.... Find dieses Cuttermesserklingensystem schlimm... sonst find ich ihn okay... Würde da ne art Trimmeraufsatz anbauen... wenn der Robi durch geht, gibts vielleicht auch keine zerschnittene Haut... (hab noch in keinen Trimmer gefasst... wer hat Erfahrungen?) und dieses ewig du hast Unrecht ich hab recht Spiel hält ganz schon auf beim Überfliegen des Threads.... also wie immer hier... schade schade...
Achso, was mir noch so einfällt... Wenn man schon Induktionsschleifen vermuddeln muss, dann kann man auch gleich in die Ränder RFID Karten reinpacken... geht vielleicht sogar noch einfacher... aller 50cm die Rasenkante mit dem Spaten hochgehebelt und drunter geschmissen das Teil... Anschließend an die Mähfront ne RFID "Sensorleiste". In jeder RFID Karte ist dann natürlich gespeichert wo er sich gerade befindet... der Rasenmäher kann dann an jeder Kante seine Position exakt bestimmen und auch logischere Wege einschlagen und die Wiese vielleicht etwas akkuschonender mähen... MfG Basti
Ja, ist mir auch als Idee gekommen, nur wird das eher teurer, und man muss die RFID auch programmieren, wie auch die Karte erstellen. Beim Kabel, einfach ein 12V Trafo, und AC Spannung über das Kabel zum Magnetfeld Pulsen lassen mit, eventuell auch mit 10Khz (als Hausnummer) welches man für die Drahtlose Energieübertragung braucht, sei es induktiv oder magnetisch.
na man baut sich nen kleines extratool mit Stiel und speichert auf ner kleinen 512 bit karte nur eine fortlaufende nummer... ist ja jetzt nich schwierig... Man kann die ränder ja auch mit induktionsschleifen machen und zufällig den rasen mit rfid karten spicken... dann ne map auf den controller laden und immer wenn der robi mal eine erwischt wird versucht die route zu bestimmen... stell mir das ganz praktisch vor... hab durch fixes googeln karten für 50 cent das stück gefunden... 100 stück kann man schon machen... bin aber bei rfid speziallist, aber 15cm Lesereichweite sollte ja gerade so passen... brauch man sicher nen sehr gutes lesegerät... sorry für rs... vom iphone mfg basti
Ja, ich bin ja bei den LF RFID (125-144Khz ) stehen geblieben. Was gibt es da alles jetzt. Autos senden im 130+170Khz soweit mir bekannt. Reichweite unbekannt, aber > 20Mt. 13Mhz low power mit Reichweite von 3mt. Frequenzhub ??? 13.56Mhz wird mal verwendet. 868Mhz mit Reichweite von 10mt. Frequenzhub ??? Die Plastikkarten sind nicht Feuchtigkeitsresisten, Glassensor oder Plastiktags sollten es schon sein. Man könnte zwar die Plastikkarten einschweissen, kostet aber letztendlich zu viel. Mit dem 13Mhz kann man schön arbeiten. Frage ist natürlich der Aufwand. Die SW ändern, die Bedienung. Für uns "Techniker" kein problem, für andere schon. Weiters wenn man alle beide Algorithmen implementieren muss, macht man da nicht doppelte und ev. sinnlose Arbeit oder macht man das System dann nicht zu kompliziert. Gruß
Für ein Produkt finde ich die Idee unpassend, aber für einen Bastler gelten andere Gesetzmäßigkeiten. Die Details würden sicherlich einige Stunde Nachdenken erfordern.
Angehängte Dateien:
-

indu_sch.png
35 KB
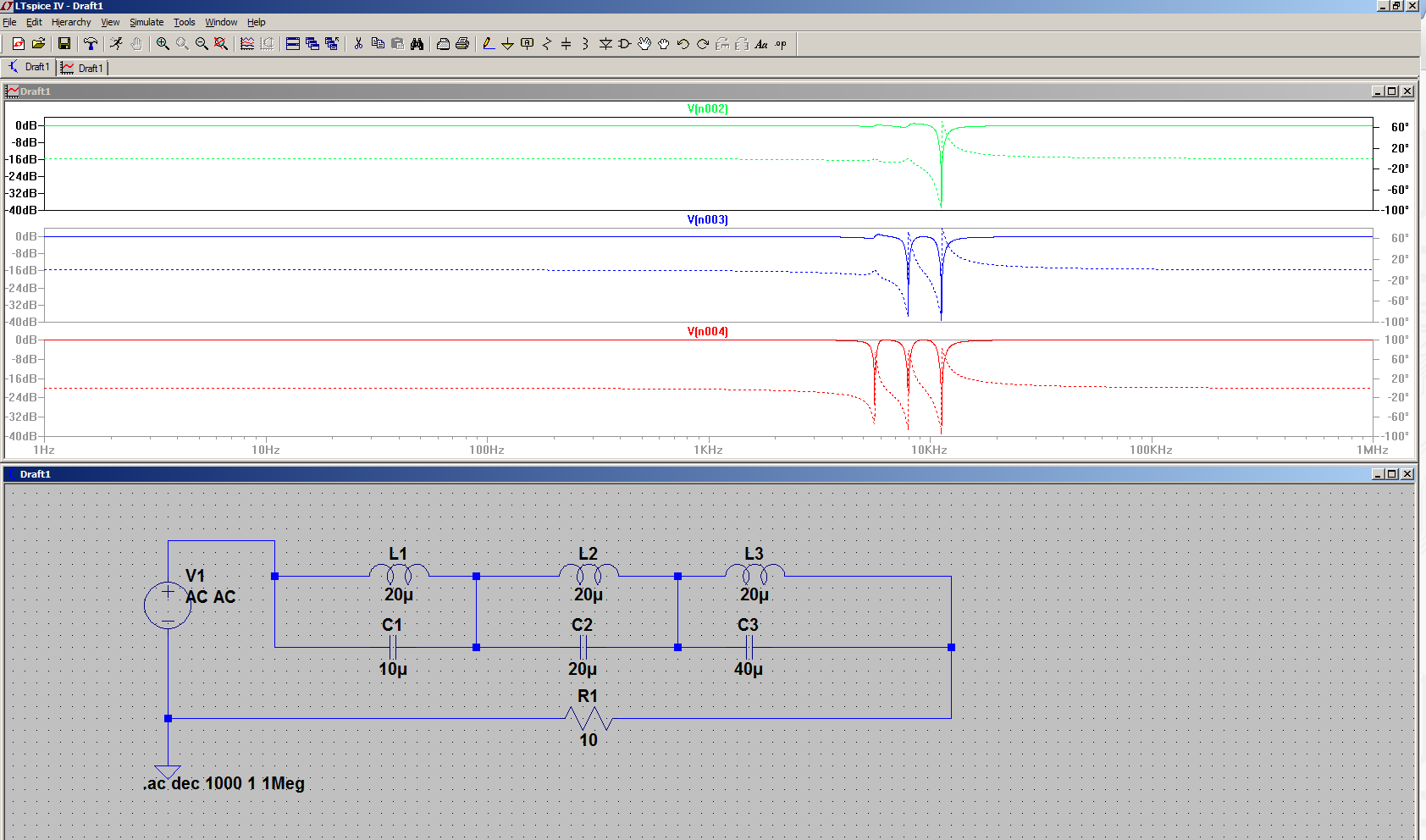
Hm, dann mal noch nen Gedanke... Die Induktionsschleife wird aller 50 cm mit einem Sperrkreisen gespickt und in den Rasenrändern verlegt... auf die Induktionsschleife wird nen Sweep gegeben... Auf dem Robi wird dann mitgezählt wie viel Frequenzeinbrüche es gab und daran die Randposition ermittelt... Keine Ahnung ob das Funktioniert... ;) hab zur Anschaulichkeit mal schnell gespiced MfG Basti
Harald schrieb: > Der Suchdraht ist übrigens kein offener Draht wie weiter oben angegeben > sondern immer ein mehr oder weniger mittig verlaufender Draht, welcher > als Anzapfung im Außendraht endet. Der Stromfluss wird umgeschaltet, so > dass sich im Falle des Suchdrahtes ein gedachtes verkleinertes Feld > ergibt. Die Codierung des Signals lässt dem AM wissen, um welches Feld > es sich gehandelt hat. Stimmt, Du hast Recht. Ich erinnere mich jetzt: das Ende war nicht offen. Naja, ist auch schon zwei Jahre her, dass ich das Ding genauer in Augenschein genommen hab ... Man möge es mir nachsehen :-) Chris D.
> > Man möge es mir nachsehen :-) > > Chris D. Aber klar doch! Die Idee mit den RFID Tags finde ich interessant, allerdings müsste man dann mit stärkerer Motorleistung arbeiten. Es ist nämlich so, dass der AM bei einmaliger Überfahrung nicht unbedingt alle Halme konsequent erwischt. Macht durch die mehrfache Überfahrung aber nichts. Auch wenn Konkurrenzprodukte hier offensichtlich den Anschein erwecken, dass alles nur plattgefahren ist. Schaut euch einen Garten, der von Husqvarna gemäht wird, einfach mal an. Da gibt es nicht zu mäkeln, ganz im Gegenteil...
Angehängte Dateien:
-

ardumower_photo.jpg
770 KB
{kind=link}
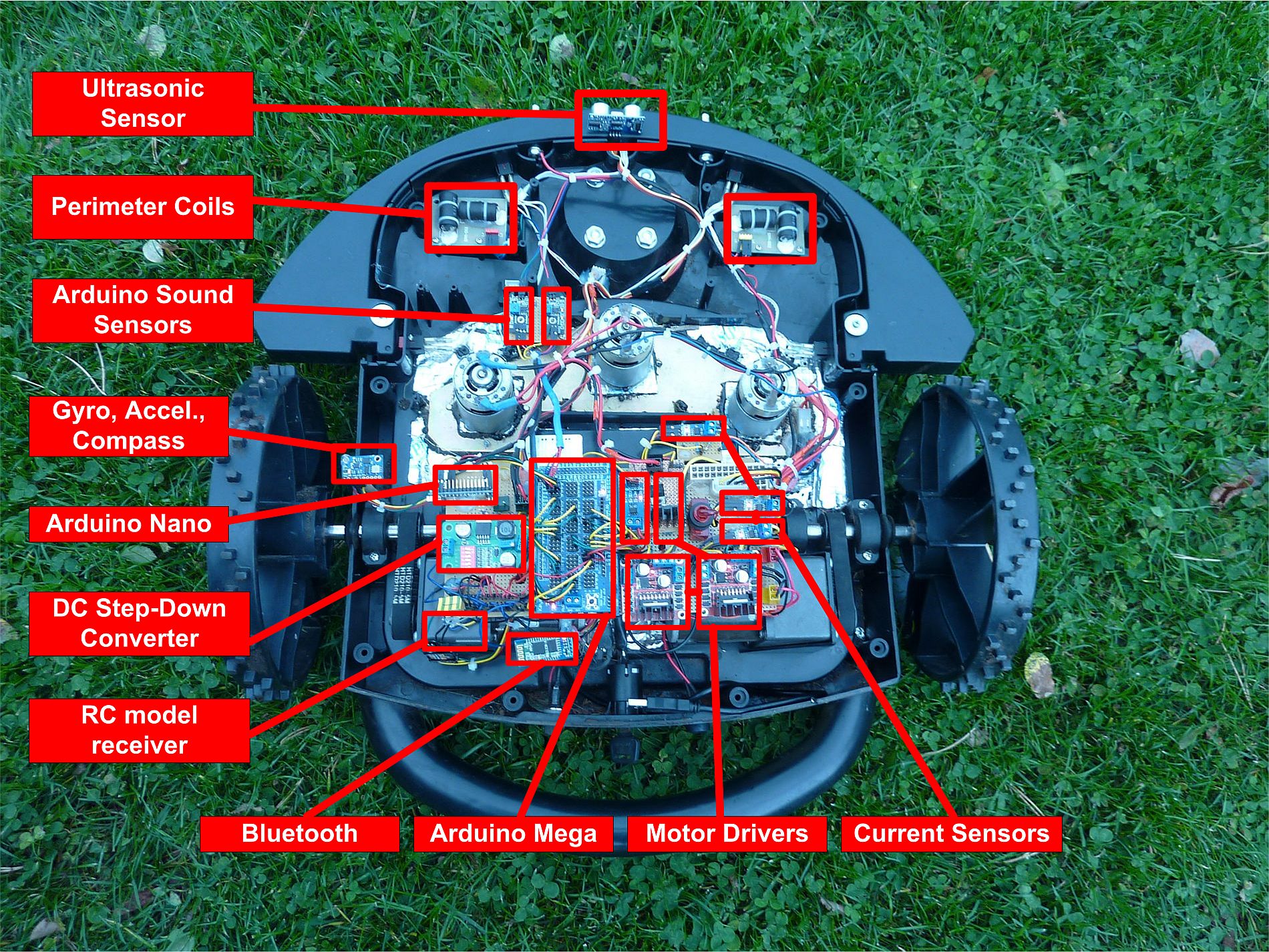
Hallo Alexander, ich hoffe Du schaust hier noch vorbei. Wie man auch hier sieht fesselt das Thema ne Menge Leute. Software und Schaltpläne findest Du auch auf www.ardumower.de. Wenn Du also noch an dem Thema Interesse hast, bei uns findest Du alles was man braucht. An dem Thema "Kombination von Odometrie/GPS/Gyro/Kompass" sind wir auch dran, ist aber nicht so einfach und ne Menge Mathematik. Grüße Markus
Markus schrieb: > ist aber nicht so einfach und ne Menge Mathematik. Warum? Rasen ist relativ glatt, zumindest in deutschen Vorgärten. Im Übrigen gibt es zu jedem Mäher für die Faulen eine Strippe, die er einmal im Grenzgebiet zu Büschen und Nachbarn einbuddeln muß, an der sich der Mäher orientiert. So what?
So, da ich hier oft "geht nicht, zu teuer, kann nicht sein usw" lese: Geht doch, Spätsommer 2012 1. Mäher gebaut, 1 Atmel 2561, Bumper mit 2 Taster vorne, Bumper mit 1 Taster hinten Drehzahlüberwachung Mähwerk, Drehzahlüberwachung Räder, Neigungsschalter ..., der Roboter fährt einfach per Zufall durch den Garten, ohne Kabel, ohne Kompass, ohne GPs. Ladestation findet er per Funkleuchtfeuer und 6 M Kabel mit HF- Signal drauf. Programm für den Atmel per Elab_AvRco. Sommer 2012 und 2013 Garten mit ca. 1000 m2 tadellos gemäht. Kosten ca. 350 € Und warum soll das nicht gehen ???
Vickerl schrieb: > Und warum soll das nicht gehen ??? Na ganz einfach: die üblichen Foren-Clowns MaFail und cyblorb haben mal wieder Langeweile in Muttis Keller :)
Rasen schrieb: > Markus schrieb: >> ist aber nicht so einfach und ne Menge Mathematik. > > Warum? > Rasen ist relativ glatt, zumindest in deutschen Vorgärten. > Im Übrigen gibt es zu jedem Mäher für die Faulen eine Strippe, die er > einmal im Grenzgebiet zu Büschen und Nachbarn einbuddeln muß, an der > sich der Mäher orientiert. So what? @Induktionsschleife Das ist mit unserem System auch möglich (ein Blick auf die Seite hätte es verraten), Die Empfangseinheit und der Sender laufen gut. Allerdings fänden es die meisten schon besser auf das Verlegen, verzichten zu können. Grassensoren Funktionieren nicht so zuverlässig wie gewünscht, das geht auch nicht, es sei denn man stimmt das Umfeld darauf ab. Aber da sind wir schon wieder bei dem Punkt, das die Technik dem Menschen dienen soll und nicht wir der Technik. Sind die Übergänge am Rasenende auch bewachsen oder es liegt viel Laub, ist es sehr feucht/trocken... kommen Fehler vor. Daher der Weg in Richtung Kombination von GPS, Odometrie, Kompass, Gyro. Und das ist nun mal Mathematik. Kompass/Gyro laufen schon recht gut, man kann jetzt für Testzwecke auch Bahnen Mähen aktivieren. Nebenbei noch ein Punkt der für dieses Navigationsprinzip spricht. Dieses Kreuz und Quer Fahren ist ja nun auch nicht der Weisheit letzter Schluss. Ein sauberes Abfahren der Flächen spart viel Zeit, Verschleiß und Energie. Inzwischen ist auch die Handy Steuerung recht ausgereift, Alle Werte, wie z.B. Stromaufnahme der Antriebsmotoren, Werte der Ultraschall Sensoren u.s.w. können Live im Betrieb über das Smartphone verfolgt werden und Anpassungen direkt vorgenommen werden. (ink. Speichern) Einige Möglichkeiten der Anpassung sind z.B. Abschaltung der Fahrmotoren bei XX A Stromaufnahme, Wert XX der Ultraschall Sensoren damit gestoppt wird, Höhe der Spannung, ab der wieder zur Ladestation gefahren werden soll, Wert für Verzögerte Reaktion an der Schleife, so kann man Einstellen wie weit die Schleife überfahren wird, damit möglichst wenig Rand stehen bleibt. Und und und... die Möglichkeiten sind riesig. So kann man alles auf seine verwendete Hardware anpassen, ein wichtiger Punkt, wenn man möglichst viele zum nachbauen Gewinnen will. Andere Punkte sind in Planung, wie z.B. Induktives Laden um auf die Ladestation verzichten zu können. Also wer Lust auf das Projekt hat, ob zum nachbauen oder mit entwickeln ist Herzlich Eingeladen. Grüße Markus www.ardumower.de
Isso schrieb: > Vickerl schrieb: >> Und warum soll das nicht gehen ??? > > Na ganz einfach: die üblichen Foren-Clowns MaFail und cyblorb haben mal > wieder Langeweile in Muttis Keller :) Na wieviele Autonome Roboter hast du denn schon gebaut Bubi? Sicherlich, wenn man keine Ansprüche hat, geht das. Zufällig rumfahren und mit Bumpern zufällig irgendwie ausweichen ist kein Problem. Aber ne Ladestation findet man so nicht wieder. Und sicherstellen dass alles gemäht wird, und das in kurzer Zeit, geht so auch nicht. Die Methode mit dem Draht ist gut und erprobt. Hier verhindert man immerhin ein rausfahren aus dem erlaubten Gebiet UND kann zur Basistation führen. Aber das rumfahren bleibt zufall und man muss die Drahterkennung erstmal elektronisch lösen und man muss sicherstellen dass der Robot sich nicht irgendwie bei drehen zufällig über den Draht rübermogelt. Ich dachte bei "Mähroboter" schon an einen richtigen Autonomen Roboter, der auch weiß wo er ist, und nicht an so was anspruchsloses. gruß cyblord
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.