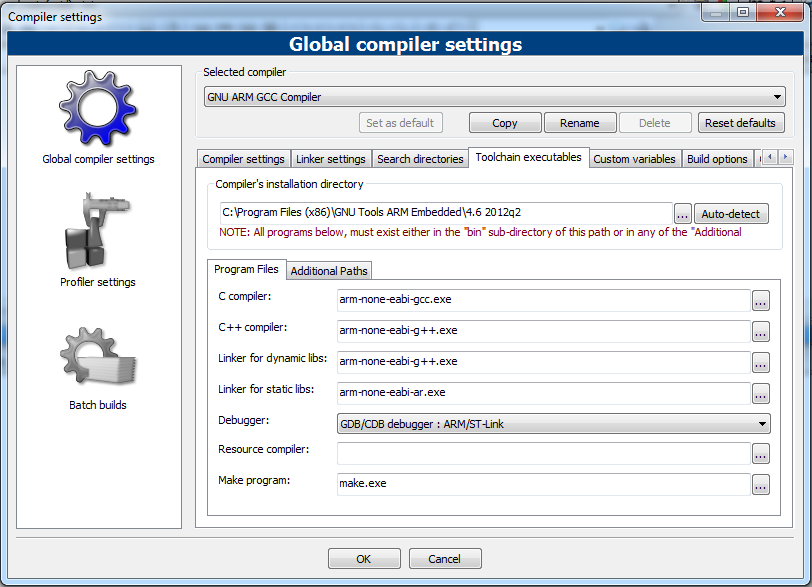
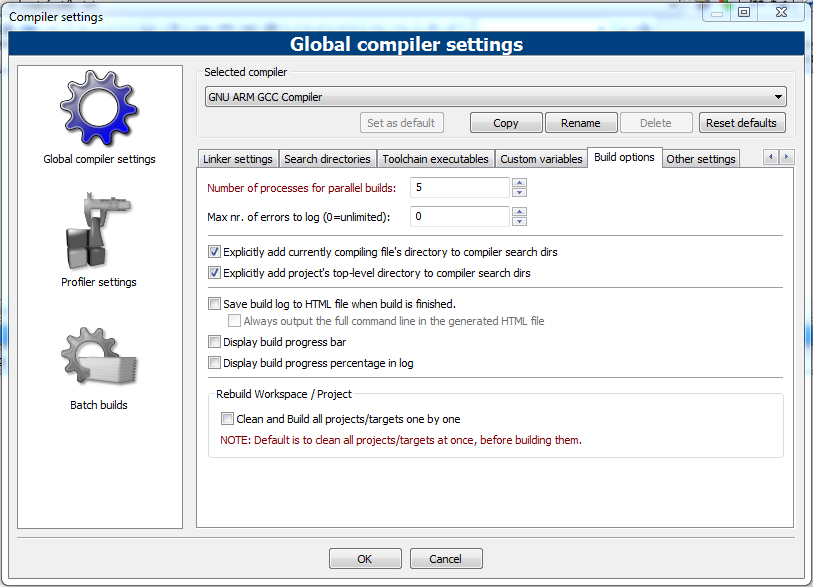
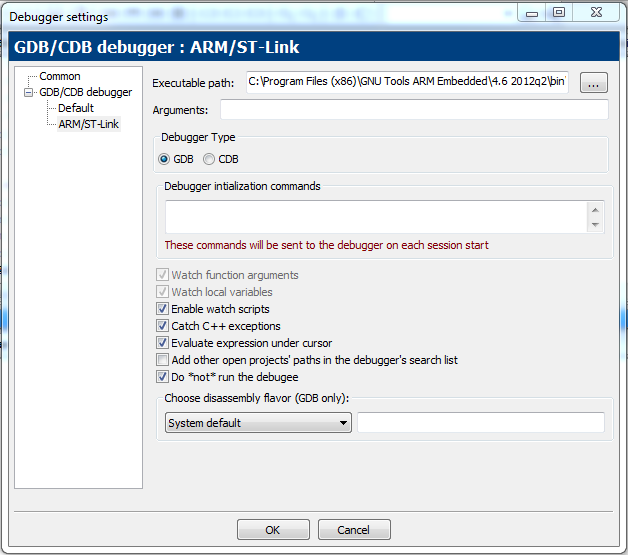
Für all diejenigen, denen die ganzen eclipse-basierten IDE-Lösungen für den Cortex-Mx und dem GCC nicht wirklich zusagen möchte ich hier eine Alternative vorstellen (in diesem Fall speziell für das STM32F4-Discovery-Board unter Windows - sollte aber auch ohne größere Probleme auch unter Linux und für andere Cortex-M Prozessoren zum laufen gebracht werden können): Dazu braucht ihr: 1) Code::Blocks: Ich verwende eine relativ aktuelle Version aus dem *SVN (#8086)* - mit der derzeit letzten Stable-Version wird es nicht funktionieren, da dort u.a. einige Funktionen im Debugger noch nicht zur Verfügung stehen. Hier ein Link zur Detaillierten beschreibung der "Nightly-Builds": http://forums.codeblocks.org/index.php/topic,16560.0.html Kurz zusammengefasst: einfach den Inhalt dieser 3 Archive z.B. in C:\Programme\CodeBlocks\ entpacken: http://prdownload.berlios.de/codeblocks/wxmsw28u_gcc_cb_wx2812_gcc452-TDM.7z http://prdownload.berlios.de/codeblocks/mingwm10_gcc452-TDM.7z http://prdownload.berlios.de/codeblocks/CB_20120707_rev8086_win32.7z CodeBlocks kann danach einfach über eine Verknüpfung zur CodeBlocks.exe gestartet werden. 2) GNU Tools for ARM Embedded Processors: Ich verwende die aktuellste Version (*4.6-2012-q2-update*) - die älteren Versionen haben noch einen Bug im GDB, der mit den absoluten Dateipfaden im Windows-Stil Probleme hat (der ":" bei C:\ wird falsch interpretiert), wodurch das Debugging mit CodeBlocks nicht funktioniert, also auf jedenfall die aktuellste Version des Compilers verwenden! Direkter Download-Link - einfach installieren: https://launchpad.net/gcc-arm-embedded/4.6/4.6-2012-q2-update/+download/gcc-arm-none-eabi-4_6-2012q2-20120614.exe 3) GDB-Server aus dem Atollic-Truestudio: Nach der installation der kostenlosen Version liegt der GDB-Server in: C:\Program Files\Atollic\ST-LINK_gdbserver\ Dieser ganze Ordner kann bei bedarf einfach kopiert werden und Atollic wieder deinstalliert werden. Zur Verwendung muss nur die .bat-Datei ausgeführt werden, bevor der Debugger in CodeBlocks gestartet wird Sollte der GDB-Server nicht richtig starten (als letzte Zeile der Ausgabe sollte stehen: "Waiting for client connect on port 61234") muss der ST-Link_V2_USBdriver.exe, der im gleichen Server wie der GDB-Server liegt, noch installiert werden. 4) Einstellungen in CodeBlocks: Hauptsächlich muss nur der Pfad zum Compiler und Debugger eingestellt werden, der Rest wird durch das Projekt-File erledigt. Dazu unter Settings->Compiler bzw. Settings->Debugger die Einstellungen entsprechend den angehängten Bildern vornehmen. Am besten mit den Debugger-Einstellungen beginnen, da man sonst in den Compiler Einstellungen nicht gleich den richtigen Debugger auswählen kann. Der executable-Path beim Debugger muss auf den arm-none-eabi-gdb.exe gesetzt werden (wird im Bild nicht ganz deutlich) Die "Number of processes for parallel builds" sollte auf die Anzahl der CPU-Cores+1 gesetzt werden - also bei einem Dual-Core auf 3 - den Wert auf 1 zu lassen schadet bei der größe der meisten Projekte aber auch nicht.. 5) Das Beispielprojekt aus dem Anhang: Einfach irgendwo hin entpacken *(der Pfad darf KEINE Leerzeichen enthalten!)* - das Projekt aber noch nicht öffnen! 6) STM32F4 DSP StdPeriphLib V1.0.1: http://www.st.com/internet/com/SOFTWARE_RESOURCES/SW_COMPONENT/FIRMWARE/stm32f4_dsp_stdperiph_lib.zip Direkt in das Beispiel-Projektverzeichnis Entpacken. Nach dem Entpacken sollte die Verzeichnisstrucktur so aussehen: STM32F4-Test\STM32F4xx_DSP_StdPeriph_Lib_V1.0.1\... 7) Projekt über das *.cbp-File aus CodeBlocks heraus öffnen 8) Unter Project->Build Options und Project->Properties können die genauen Einstellungen zum compilieren festgelegt werden. In den Properties->Build Targets kann dann auch eingestellt werden, welche Dateien aus der StdPeriphLib mit compiliert werden - im Beispiel-Projekt, das einfach die 4 LEDs des Discovery-Board nacheinander einschaltet werden nur die 'rcc' und 'gpio' benötigt - mehr ist derzeit deshalb auch nicht aktiviert.. 9) Wenn die Debug-Konfiguration compiliert wurde und der GDB-Server von Atollic gestartet ist kann das Programm einfach in den Flash geschrieben werden, indem man Debug->Start/Continue anwählt (oder F8 drückt) Wenn in den Debugger-Optionen, wie im Angehängten Bild zu sehen, die Option "Do NOT run the Debugee" aktiv ist wird nach dem Flashen der Prozessor angehalten - das Programm läuft erts bei einem zweiten Klick auf Debug/Continue los! 10) Wird die Release-Configuration compiliert befindet sich nach dem Compilieren in bin/Release/ ein *.bin-File, das mit dem ST-Link utility in den Prozessor geflasht werden kann. Wenn alle Schritte so befolgt werden sollte man direkt zu einer funktionsfähigen Firmware kommen. Das Beispielprojekt ist mit Sicherheit nicht perfekt, aber ein guter Ansatz für erste Versuche mit CodeBlocks. Woran ich zum Beispiel bis jetzt gescheitert bin ist, die Firmware beim Debuggen im Ram des Prozessors laufen zu lassen, um nicht bei jedem Versuch den Flash beschreiben zu müssen. Vorschläge zur Verbesserung der Projekt-Einstellungen - vor allem der Compiler-Parameter - werden gerne entgegen genommen ;) Vielleicht hat auch jemand noch einen Tipp, wie man einfacher an den GDB-Server von Atollic kommen kann, ohne dass man die ganze Software vorher installieren muss.
Angehängte Dateien:
-

Compiler-Settings_1.PNG
74 KB -

Compiler-Settings_2.PNG
68 KB -

Debugger-Settings.PNG
38 KB
...sehr gute Arbeit! Ich fürchte nur, wer den Eclipse-Moloch schon am Laufen hat, wird vor einer neuen IDE zurückschrecken. Wenn ich mich recht erinnere, ist CODE::BLOCKS bei weitem nicht so umfangreich! Ich habe CB schon lange laufen, allerdings nur als Hilfseditor für z.B. RIDE, der von Haus aus keine .h - files anzeigt(ist aber kein Nachteil, den so ist es übersichtlicher, wenn die Programme grösser sind); Das stm32_st-link-utility kann als .zip von ST heruntergeladen werden... Wie stellst Du beim Projekt erstellen das Device ein? (Und das passende Linker-file?); Du merkst sicherlich, ich habs selbst nochnicht ausprobiert...
Das Device wird in den Build Options unter "Compiler Settings" und
"Linker Settings" eingestellt, direkt über die Parameter, mit denen der
Compiler gestartet wird. Also z.B. -mcpu=cortex-m4.
Das Linker-File ebenso über den entsprechenden Parameter. z.B.
-T"${PROJECT_DIR}stm32_flash.ld"
Dabei muss man aber aufpassen, das in der Auswahl auf der linken Seite
das ganze Projekt ausgewählt hat und nicht das Debug bzw. Release
Target.
Man könnte das ganze aber auch noch etwas übersichtlicher gestalten, in
dem man sich im Tab Custom-Variables eigene Variablen anlegt, die dann
an den entsprechenden Stellen eingesetzt werden. (so hätte man eine
Zentrale Anlaufstelle für die meisten Compiler-Optionen..)
...die Idee ist gut! Ich probiers aus, wenn ich die Zeit finde. (Ätze grad ein neues Aufsteckboard WLAN/LAN für STM32F417) Danke...
Moin, Hab die emIDE gerade mal ausprobiert. Wenn ich ein neues Projekt erstellen will zeigt er mir keinen Wizard an ich komme da also nicht weiter. Viel weiter habe ich dann garnicht getestet, weil mein Eclipse läuft. Aber interessant finde ichs schon. Wie ist das mit Cpp bei Code::Blocks? MfG Tec
Markus Müller schrieb: > Ich habe den Thread mal reingenommen in den Artikel STM32 unter > "Programmierung". Danke, wollte ich bei Gelegenheit auch machen.. EMMIDE schrieb: > http://www.emide.org/ > > * für ARM > * basiert auf Code::Blocks > * Plugin für J-Link gdbserver Ich habe mir das ganze gerade einmal kurz angeschaut, leider wäre das für mich keine Alternative, da offensichtlich wirklich nur der J-Link unterstützt wird und keine anderen Debugger, wie z.B. der ST-Link auf den Discovery-Boards. Somit ist wieder an spezielle Hardware gebunden. Soweit ich das erkennen kann fehlt jetzt sogar die Möglichkeit einen beliebigen GDB-Server zu verwenden. (Ich gehe einmal davon aus, dass Du der Verantwortliche von emIDE bist, da es ja anscheinend noch nicht so weit verbreitet ist..) Mir ist aufgefallen, dass es keinen Quellcode mit den Änderungen zum ursprünglichen CodeBlocks Source-Code gibt. Ich bin zwar nicht wirklich Experte auf dem Gebiet, aber soweit mir bekannt ist lässt sich das so mit der GPL nicht vereinbaren.. Vor allem, da in emIDE einige interessante Bugfixes existieren, die bei CodeBlocks noch nicht verfügbar sind: > "Double execution of forst additional GDB command, handle lines starting with # in additional GDB commands as comment" Ich hatte schon einmal vermutet, dass CodeBlocks den "load"-Command, der in meinem Beispiel-Projekt als erster Command im GDB ausgeführt wird, zwei mal an den GDB sendet.. > "Added 'Reset target' to the debugger." Den 'Reset Target'-Button gibt es in CodeBlocks nicht - ist allerdings auch kein großes Problem, da man ein "monitor reset" über das Debugger-Window auch direkt an den GDB absetzen kann. Es würde aber etwas Zeit sparen, wenn man nur einen Button anklicken müsste. Was emIDE aber auch noch fehlt, ist eine Trennung zwischen Debugger starten und Programmspeicher beschreiben - ich habe zumindest öfter den Fall, dass ich zwar noch einmal Debuggen will, sich aber an dem Programmcode nichts geändert hat. Somit wäre ein neues beschreiben des Flash zum einen unnötige Zeit und zum anderen werden Write-Cycles des Flash verschwendet. ------------------------------------------------------------ Noch ein paar Tips zum Beispiel Projekt aus dem ersten Post: Man könnte unter "Project->Properties->Debugger->Debug->Additional GDB Commands" den "load"-Befehl einfach herausnehmen, dann wird der Flash beim starten des Debuggers nicht neu beschrieben. Das Flashen könnte dann bei aktivem Debugger durch einen manuell abgesetzten Load-Command gestartet werden. Oder man legt sich alternativ unter "Build Targets" weitere Targets an - wie z.B. "Debug" und "Flash+Debug", die dann entsprechend den load ausführen oder nicht. Auch interessant wäre hier ein Target "Debug in RAM", bei dem der komplette Code in den Ram geladen wird. Allerdings habe ich mich damit noch nicht genug beschäftigt und mir fehlen hier noch ein paar Infos, was man dazu noch alles braucht. Vermutlich müsste dazu das Linker-File geändert werden und in den Flash an den Reset- und Interrupt-Vektoren ein Sprung zu den entsprechenden Stellen im RAM gesetzt werden. Wenn jemand Infos dazu hat - gerne her damit ;) Tec Nologic schrieb: > Moin, > > Hab die emIDE gerade mal ausprobiert. > Wenn ich ein neues Projekt erstellen will zeigt er mir keinen Wizard an > ich komme da also nicht weiter. Viel weiter habe ich dann garnicht > getestet, weil mein Eclipse läuft. Aber interessant finde ichs schon. > > Wie ist das mit Cpp bei Code::Blocks? > > MfG > > Tec Das mit dem Wizard ist mir auch direkt nach dem Starten aufgefallen. Ein neues Projekt anzulegen scheint unmöglich zu sein. Cpp ist bei CodeBlocks kein Problem.
Hallo! Ich bin nicht der Entwickler der IDE. :-) Bin nur durch Zufall drüber gestolpert: http://www.segger.com/jlink-ide-integration.html Da ich beruflich mit IAR und dem J-Link arbeite, bin ich ein großer Fan von diesem Duo. Die Qualität der Software rund um den J-Link finde ich prima hinsichtlich Stabilität. Daher würde ich den gerne auch privat einsetzen (J-Link EDU für ca. 50EUR). Nur leider ist mir die EWB von IAR zu teuer, um sie privat kaufen. Die Kickstart-Version reicht leider nicht mehr aus. Daher suche ich jetzt nach einer freien Alternative, die den J-Link benutzen kann. Generell bin ich auch nicht so der Eclipse-Fan. Da kam emIDE gerade gelegen. Leider habe ich auch noch nicht herausgefunden, wie man ein Projekt anlegt.
Dann probiere doch erst einaml CodeBlocks ohne die Modifikationen von emIDE - da es ja soweit ich gesehen habe einen GDB-Server für den J-Link gibt sollte es kein großartiges Problem sein das Beispiel-Projekt auf den J-Link GDB-Server einzustellen. Im Prinzip müsste man nur unter Project/Debugger den Port anpassen und ggf. noch bei den additional commands kleine Anpassungen machen - der Rest sollte gleich bleiben können. Und man müsste halt im gegensatz zu emIDE den GDB-Server von Hand starten.. Für andere Prozessoren braucht man ggf. noch entsprechende Linker und Starter-Files - die sollten sich aber auch finden lassen. Ich bin gerade dabei mir ein neues Projekt Template zu bauen, mit den Erkenntnissen der letzten Tage.. mal sehen was dabei raus kommt.
Im Anhang gibt es jetzt das Ergebnis des neuen Templates! (Anweisungen
zur Verwendung in der README.txt)
jetzt sind unter Custom Variables die wichtigsten Einstellungen für den
Prozessor zusammengefasst und es gibt 3 Targts:
Flash+Debug:
Dieses Target startet den Debugger und beschreibt sofort den Flash mit
dem aktuell compilierten File.
Debug:
Wenn man den Debugger mit diesem Target startet wird nur der GDB
gestartet - der Flash aber nicht beschrieben.
Release:
erzeugt ein ${PROJECT_NAME}.bin-File, dass mit dem ST-Link Utility auf
den Prozessor geladen werden kann.
Hi! Ich habe das mit CB und einem J-Link EDU jetzt soweit laufen. Kannst Du mir erklären, was das Ändern des Linker-Skripts bewirkt? Stichwort: " _exit = .;" Ich kann meinen Startup-Code nämlich ohne Probleme debuggen. Allerdings lande ich immer im Hard Fault Handler sobald ich auf "BL __libc_init_array" komme. Ich muss dazu sagen, dass ich einen STM32L152VB benutze. Ich hatte mir ein Projekt von Atollic Truestudio Lite generieren lassen und das Linker-Skript benutzt.
Ok. Das Problem mit __libc_init_array() hat sich erledigt. Es ist bei Dir ja auch aus kommentiert. Da kein C++ mit statischen Konstruktoren vorhanden ist, wird das wohl nicht benötigt. Siehe dazu Punkt 22: http://eetimes.com/design/embedded/4026075/Building-Bare-Metal-ARM-Systems-with-GNU-Part-2 Könntest Du das mit dem Linker-Skript trotzdem noch erläutern? Danke!
erhardd schrieb: > ...die Idee ist gut! > Ich probiers aus, wenn ich die Zeit finde. > (Ätze grad ein neues Aufsteckboard WLAN/LAN für STM32F417) > Danke... Was für ein WLAN-Modul verwendest du denn?
EMIDE schrieb: > Hi! > > Ich habe das mit CB und einem J-Link EDU jetzt soweit laufen. > > Kannst Du mir erklären, was das Ändern des Linker-Skripts bewirkt? > Stichwort: " _exit = .;" > > Ich kann meinen Startup-Code nämlich ohne Probleme debuggen. > Allerdings lande ich immer im Hard Fault Handler sobald ich auf "BL > __libc_init_array" komme. > > Ich muss dazu sagen, dass ich einen STM32L152VB benutze. Ich hatte mir > ein Projekt von Atollic Truestudio Lite generieren lassen und das > Linker-Skript benutzt. Hi, mit dem Linker-Script bin ich auch noch nicht so richtig Fit - aber hier mal ein Versuch zur Erklärung (ohne Garantie auf Richtigkeit!): wenn der Eintrag im Linkserscript fehlt bekomme ich beim linken folgende Fehlermeldung:
1 | arm-none-eabi-g++.exe |
2 | -o bin\Debug\TRIP_STM32_Graph.elf |
3 | obj\Debug\STM32F4xx_DSP_StdPeriph_Lib_V1.0.1\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\system_stm32f4xx.c.o |
4 | obj\Debug\STM32F4xx_DSP_StdPeriph_Lib_V1.0.1\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_gpio.c.o |
5 | obj\Debug\STM32F4xx_DSP_StdPeriph_Lib_V1.0.1\Libraries\STM32F4xx_StdPeriph_Driver\src\stm32f4xx_rcc.c.o |
6 | obj\Debug\TRIP_STM32_Graph\main.c.o |
7 | obj\Debug\STM32F4xx_DSP_StdPeriph_Lib_V1.0.1\Libraries\CMSIS\Device\ST\STM32F4xx\Source\Templates\TrueSTUDIO\startup_stm32f4xx.s.o |
8 | -mthumb |
9 | -Wall |
10 | -mlittle-endian |
11 | -T"C:\Software\TRIP_STM32_Graph\..\STM32F4xx_DSP_StdPeriph_Lib_V1.0.1\Project\STM32F4xx_StdPeriph_Templates\TrueSTUDIO\STM324xG_EVAL\stm32_flash.ld" |
12 | -mcpu=cortex-m4 |
13 | -mfloat-abi=hard |
14 | -mfpu=fpv4-sp-d16 |
15 | -g |
16 | |
17 | c:/program files (x86)/gnu tools arm embedded/4.6 2012q2/bin/../lib/gcc/arm-none-eabi/4.6.2/../../../../arm-none-eabi/lib/armv7e-m/fpu\libg.a(lib_a-exit.o): In function `exit': |
18 | exit.c:(.text.exit+0x16): undefined reference to `_exit' |
Was vermutlich daran liegt, dass der Linker nicht weis an welche Stelle er diese Section schreiben soll. Die Zeile im Linker-Script teilt ihm das dann mit, das die Funktion an das Ende des Flash kommt. (Die Problemlösung hatte ich durch googlen gefunden - aber den Link nicht mehr parat..) Wozu er überhaupt die exit funktion mit linken will ist mir allerdings ein Rätsel, da auf einem µC die Main in eine Endlos-Schleife läuft und nie ein Exit benötigt wird. Vermutlich wurde deswegen die Exit-Funktion in der Atollic-Toolchain (von der ja eigentlich das Linkerscript stammt) weg optimiert und auch kein Eintrag im Linkerscript dazu erstellt, während sie in den GNU Tools for ARM Embedded Processors noch mit vorhanden ist.. Gruß, André
@andre-w Strange. Ich habe das Linker-Skript so gelassen, wie es dem Atollic herauskommt. Bei mir läuft der Compiler durch. Wie genau läuft das hier jetzt eigentlich mit der libc? Ich möchte natürlich auch ein paar Ausgaben mit printf() erzeugen. Beim Atollic kann man dazu ja die Funktion _write() schreiben, die dann angeblich vom eingebauten printf() benutzt werden kann. Zum Beispiel so:
1 | int _write(int file, char *ptr, int len) |
2 | {
|
3 | /* Implement your write code here, this is used by puts and printf for example */ |
4 | int i=0; |
5 | for(i=0 ; i<len ; i++) |
6 | ITM_SendChar((*ptr++)); |
7 | return len; |
8 | } |
Gibt es so einen Mechanismus auch bei den ARM GNU Tools? Wenn ich stdio.h einbinde und printf() aufrufe, dann gibt es sofort einen Hard Fault.
Also irgendetwas scheint da noch faul zu sein. Die Kombination aus Startup-Code und Linker-Skript scheint nicht so ganz zu passen. Zumindestens nicht, wenn man die libc (newlibc) der GNU ARM Toolchain benutzen möchte, die ja dabei ist. Muss die libc nicht erst im Startup-Code initialisiert werden? Einsprung _start zum Beispiel? In der README.TXT der Toolchain steht sowas zumindestens im Startup-Code. Wenn ich das aber einbaue, dann lande ich wieder im Hard Fault Handler. Ist die Atollic Toolchain denn SO anders? Die benutzen doch auch die newlibc.
Skript passend zum STM32L152VB:
1 | /* Entry Point */ |
2 | ENTRY(Reset_Handler) |
3 | |
4 | /* Highest address of the user mode stack */ |
5 | _estack = 0x20004000; /* end of 16K RAM */ |
6 | |
7 | /* Generate a link error if heap and stack don't fit into RAM */ |
8 | _Min_Heap_Size = 0; /* required amount of heap */ |
9 | _Min_Stack_Size = 0x80; /* required amount of stack */ |
10 | |
11 | /* Specify the memory areas */ |
12 | MEMORY |
13 | {
|
14 | FLASH (rx) : ORIGIN = 0x08000000, LENGTH = 128K |
15 | RAM (xrw) : ORIGIN = 0x20000000, LENGTH = 16K |
16 | MEMORY_B1 (rx) : ORIGIN = 0x60000000, LENGTH = 0K |
17 | } |
18 | |
19 | /* Define output sections */ |
20 | SECTIONS |
21 | {
|
22 | /* The startup code goes first into FLASH */ |
23 | .isr_vector : |
24 | {
|
25 | . = ALIGN(4); |
26 | KEEP(*(.isr_vector)) /* Startup code */ |
27 | . = ALIGN(4); |
28 | } >FLASH |
29 | |
30 | /* The program code and other data goes into FLASH */ |
31 | .text : |
32 | {
|
33 | . = ALIGN(4); |
34 | *(.text) /* .text sections (code) */ |
35 | *(.text*) /* .text* sections (code) */ |
36 | *(.rodata) /* .rodata sections (constants, strings, etc.) */ |
37 | *(.rodata*) /* .rodata* sections (constants, strings, etc.) */ |
38 | *(.glue_7) /* glue arm to thumb code */ |
39 | *(.glue_7t) /* glue thumb to arm code */ |
40 | *(.eh_frame) |
41 | |
42 | KEEP (*(.init)) |
43 | KEEP (*(.fini)) |
44 | |
45 | . = ALIGN(4); |
46 | _etext = .; /* define a global symbols at end of code */ |
47 | } >FLASH |
48 | |
49 | |
50 | .ARM.extab : { *(.ARM.extab* .gnu.linkonce.armextab.*) } >FLASH
|
51 | .ARM : {
|
52 | __exidx_start = .; |
53 | *(.ARM.exidx*) |
54 | __exidx_end = .; |
55 | } >FLASH |
56 | |
57 | .preinit_array : |
58 | {
|
59 | PROVIDE_HIDDEN (__preinit_array_start = .); |
60 | KEEP (*(.preinit_array*)) |
61 | PROVIDE_HIDDEN (__preinit_array_end = .); |
62 | } >FLASH |
63 | .init_array : |
64 | {
|
65 | PROVIDE_HIDDEN (__init_array_start = .); |
66 | KEEP (*(SORT(.init_array.*))) |
67 | KEEP (*(.init_array*)) |
68 | PROVIDE_HIDDEN (__init_array_end = .); |
69 | } >FLASH |
70 | .fini_array : |
71 | {
|
72 | PROVIDE_HIDDEN (__fini_array_start = .); |
73 | KEEP (*(SORT(.fini_array.*))) |
74 | KEEP (*(.fini_array*)) |
75 | PROVIDE_HIDDEN (__fini_array_end = .); |
76 | } >FLASH |
77 | |
78 | /* used by the startup to initialize data */ |
79 | _sidata = LOADADDR(.data); |
80 | |
81 | /* Initialized data sections goes into RAM, load LMA copy after code */ |
82 | .data : |
83 | {
|
84 | . = ALIGN(4); |
85 | _sdata = .; /* create a global symbol at data start */ |
86 | *(.data) /* .data sections */ |
87 | *(.data*) /* .data* sections */ |
88 | |
89 | . = ALIGN(4); |
90 | _edata = .; /* define a global symbol at data end */ |
91 | } >RAM AT> FLASH |
92 | |
93 | /* Uninitialized data section */ |
94 | . = ALIGN(4); |
95 | .bss : |
96 | {
|
97 | /* This is used by the startup in order to initialize the .bss secion */ |
98 | _sbss = .; /* define a global symbol at bss start */ |
99 | __bss_start__ = _sbss; |
100 | *(.bss) |
101 | *(.bss*) |
102 | *(COMMON) |
103 | |
104 | . = ALIGN(4); |
105 | _ebss = .; /* define a global symbol at bss end */ |
106 | __bss_end__ = _ebss; |
107 | } >RAM |
108 | |
109 | /* User_heap_stack section, used to check that there is enough RAM left */ |
110 | ._user_heap_stack : |
111 | {
|
112 | . = ALIGN(4); |
113 | PROVIDE ( end = . ); |
114 | PROVIDE ( _end = . ); |
115 | . = . + _Min_Heap_Size; |
116 | . = . + _Min_Stack_Size; |
117 | . = ALIGN(4); |
118 | } >RAM |
119 | |
120 | /* MEMORY_bank1 section, code must be located here explicitly */ |
121 | /* Example: extern int foo(void) __attribute__ ((section (".mb1text"))); */
|
122 | .memory_b1_text : |
123 | {
|
124 | *(.mb1text) /* .mb1text sections (code) */ |
125 | *(.mb1text*) /* .mb1text* sections (code) */ |
126 | *(.mb1rodata) /* read-only data (constants) */ |
127 | *(.mb1rodata*) |
128 | } >MEMORY_B1 |
129 | |
130 | /* Remove information from the standard libraries */ |
131 | /DISCARD/ : |
132 | {
|
133 | libc.a ( * ) |
134 | libm.a ( * ) |
135 | libgcc.a ( * ) |
136 | } |
137 | |
138 | .ARM.attributes 0 : { *(.ARM.attributes) }
|
139 | } |
Ich denke, dass mein Problem evtl. hier zu suchen ist: Beitrag "STM32F4 C++ springt bei __libc_init_array in den HardFault"
Wieder etwas gelernt. Die newlibc benutzt verschiedene Implementierungen, die für die jeweilige Architektur optimiert sind. Stichwort: multilibs Welche lib nun ausgewäht wird, kann man so überprüfen: arm-none-eabi-gcc.exe -print-multi-directory -mcpu=cortex-m3 -mthumb armv7-m Hier wird also "armv7-m" ausgespuckt. Dort befindet sich nun auch die richtige libc, die nur aus dem Thumb-Befehlssatz besteht. Der Cortex-M3 unterstützt ja nur diesen. Man muss also in CB noch unter den Linker Settings folgende Schalter einfügen: -mcpu=cortex-m3 -mthumb Dann benutzt der Linker auch die richtige libc und es gibt keinen Hard Fault mehr, weil die CPU in den ARM Modus springen sollte.
Gibt es für CB evtl. ein Plugin mit dem eine bessere Disassembly-Ansicht bekommt? Das was da aktuell geboten wird, ist ja recht spatanisch. Derzeit bekommt man nur ein wenig Assembler der aktuellen C-Source Zeile angezeigt. Scrollen ist nicht möglich.
Hallo, ich versuche schon seit einiger Zeit C::B als IDE für den STM32F4 einzustellen, aber es klappt irgendwie nicht richtig. Aktuell habe ich eine Portable Variante von CodeBblocks 12.11 und den GNU (Link aus dem ersten Beitrag) in Verwendung. Der oben mitgelieferte Projektodner (STM32F4-Template2.zip) ist eine abgewandelte Variante von André W. (Beitrag #2768278) Bulid/Rebuild laufen in Debug und Release ohne Warnungen und Fehler durch. Die *.bin wird auch erstellt und lässt sich mit dem ST-Link Untility öffnen. Das Problem ist allerdings, die Sartadresse ist immer 0x00000000, weshalb ich auch folgende Fehlermeldung bekomme:
1 | STM32 ST-LINK CLI v1.4.0 |
2 | STM32 ST-LINK Command Line Interface |
3 | Connected via SWD. |
4 | Device ID:0x411 |
5 | Device flash Size : 1024 Kbytes |
6 | Device family :STM32F4xx |
7 | Flash Programming: |
8 | File : output\Release\exe\Blinky_STM3240G.bin |
9 | Address : 0x00000000 |
10 | [0x00000000]:Invalid address! |
11 | MCU Reset. |
12 | Application started. |
Zusätzlich hab ich die http://www.emide.org/ ausprobiert. Dort hab ich ein Testprojekt erstellt und bei postbuild folgende Erweiterung eingegeben:
1 | arm-none-eabi-objcopy -O binary ${PROJEKT_DIR}output\Release\exe\${PROJECT_NAME}.elf ${PROJEKT_DIR}output\Release\exe\${PROJECT_NAME}.bin
|
2 | arm-none-eabi-size --format=berkeley ${PROJEKT_DIR}output\Release\exe\${PROJECT_NAME}.elf
|
3 | C:\Users\Talentfrei\Desktop\CodeBlocks-12P_big\tool\ST-LINK_gdbserver\ST-LINK_CLI.exe -c SWD -P "${PROJEKT_DIR}output\Release\exe\${PROJECT_NAME}.bin" -Rst -Run
|
Interessanterweise ist die Wirkung fast dieselbe. Build ohne Fehler und Warnungen und am Ende ist eine BIN Datei da. Aber auch hier ist die Startadresse wieder 0x00000000. Ich weiss nicht was ich falsch mache. Hab einen Fehler im Linkerscript vermutet und versucht hier eine Lösung zu finden http://www.bravegnu.org/gnu-eprog/c-startup.html wurde aber nicht fündig. Kann mir jemand sagen, was ich falsch mache und wie es richtig wäre? MFG
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.