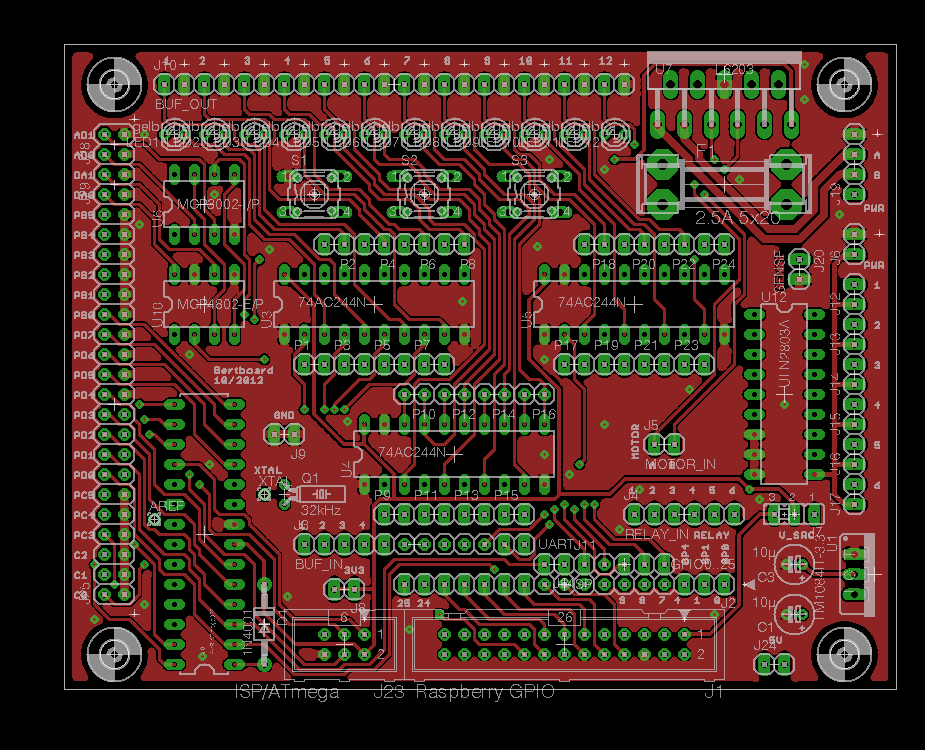
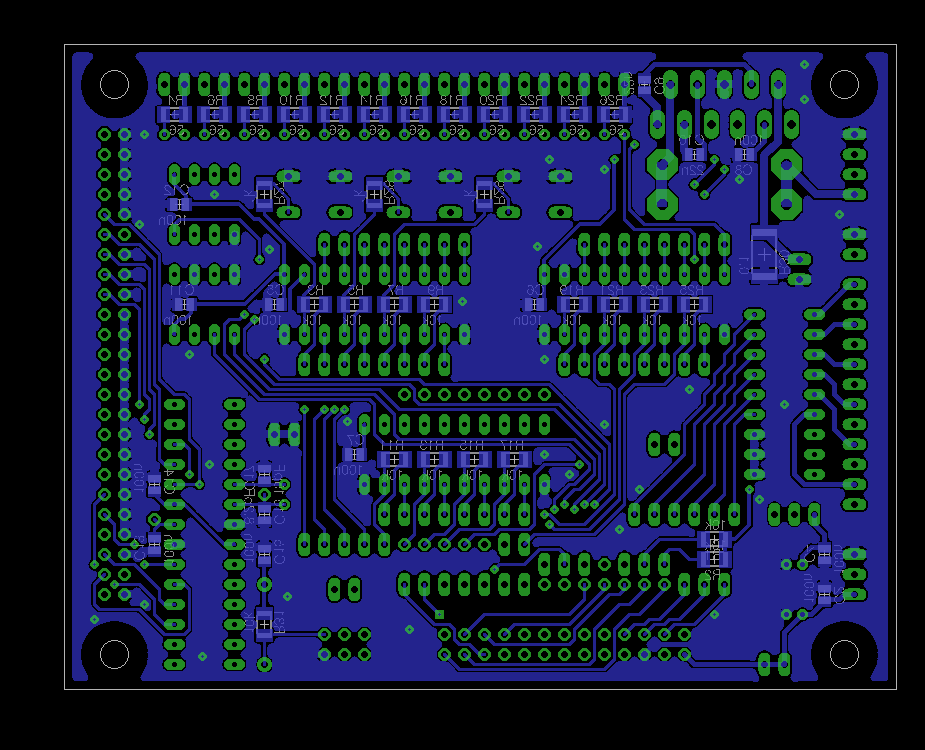
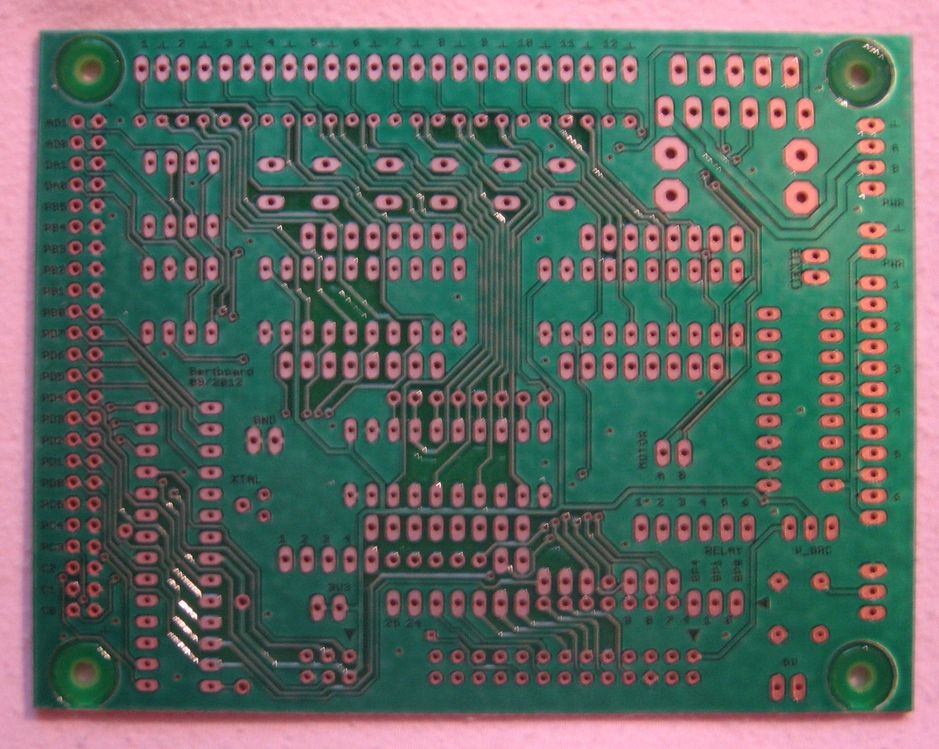
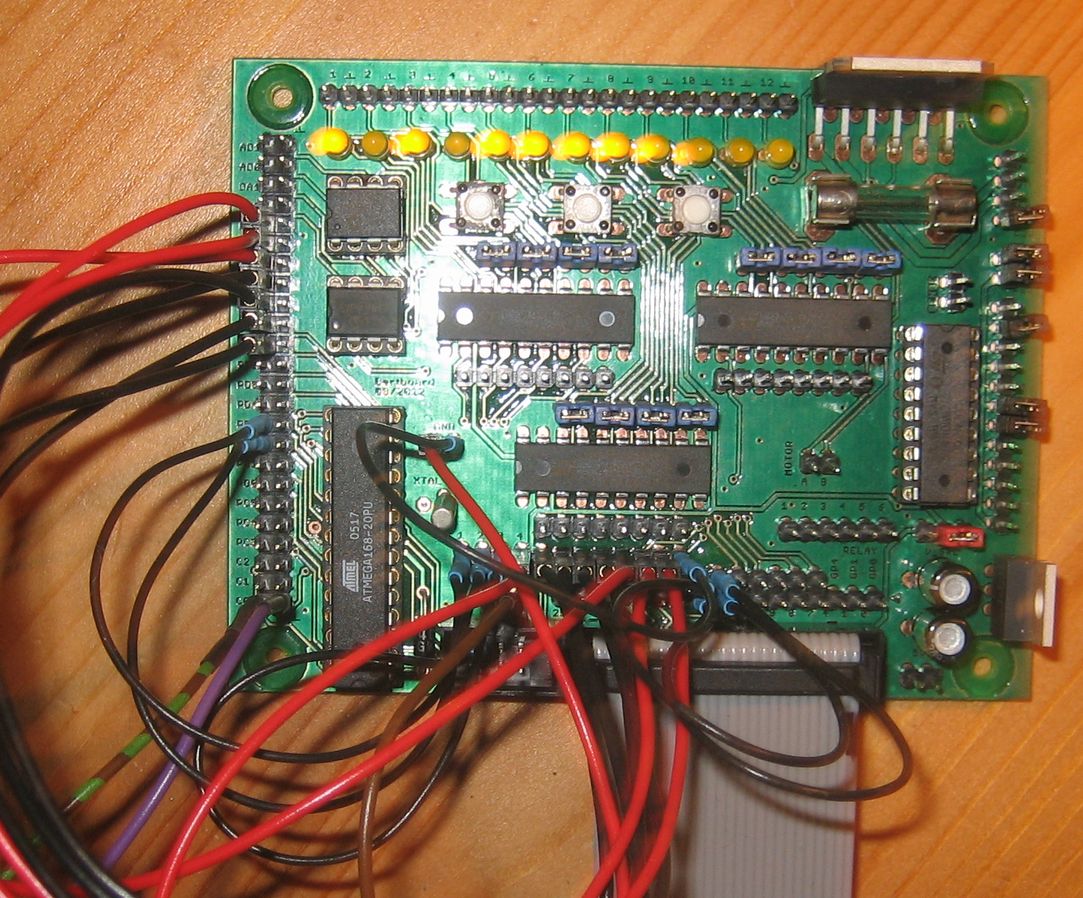
Hallo Forum! Da mir das Gertboard für den Raspberry Pi zu teuer ist, habe ich mir mein eigenes Board hergestellt: das Bertboard. Zufällig sind die Komponenten die gleichen wie auf dem Gertboard [1]. Allerdings gibt es hier den Schaltplan und das Board auch als Eagle-Datei. Dies kann somit als Startpunkt für eigene Raspberry Pi-Erweiterung verwendet werden. Im Prototyp wurden alle Funktionen erfolgreich getestet: - 6 open collector Treiber - 2-Kanal Motortreiber - 12 I/O-Puffer (mit LED) - 3 Taster - 2 A/D-Kanäle - 2 D/A-Kanäle - ATmega/Arduino-Mikrocontroller Viel Spaß damit! Bert [1] http://www.raspberrypi.org/forum/educational-applications/gertboard
Angehängte Dateien:
-

bertboard_pcb_top.png
43 KB -

bertboard_pcb_bot.png
24 KB -

bertboard_unloaded.jpg
130 KB -

bertboard_completed.jpg
230 KB
Bertboard? Gertboard? Aber ich glaube, ich weiss was du meinst, Redundanz der Sprache hat schon ihren Sinn :-) Irgendwo gabs hier schon mal was zu dem Thema.
Wah, das ist doch kein Schaltplan. Das ist eine etwas graphisch untermalte Netzliste! :-/
dann werden wir wohl auf das Ernieboard auch nicht mehr lange warten müssen...
Hallo Bert, gut gemacht. Danke dass Du es mit der Community teilst. Bester Gruß, chris
Da Dieter schrieb: > Wah, das ist doch kein Schaltplan. Das ist eine etwas graphisch > untermalte Netzliste! :-/ Das ist ein, in sinnvolle Funktionsblöcke aufgeteilter, Schaltplan. Sowas ist deutlich lesbarer als manch ein anderer Plan hier, wo alle Leitungen direkt verbunden werden mit zig überkreuzungen. Und zum Projekt: Super Sache. Und perfekter name! ;-)
Hallo und Danke für Eure Rückmeldung! Ich möchte nochmal auf zwei Unterschiede gegenüber dem Gertboard eingehen, die vielleicht auch für das eine oder andere AVR-Projekt interessant sind: 1. Im Original ist A_ref, die Referenzspannung für den A/D-Wandler, unnötigerweise mit A_Vcc verbunden. Damit verbaut man sich die Möglichkeit eine eigene, externe Spannungsreferenz anzuschließen. A_Vcc kann man trotzdem als Referenzsspannung verwenden. Dafür sind die Bits REFS1 und REFS0 am ADMUX zuständig. 2. Als Taktquelle verwende ich den internen RC-Oszillator. Damit eine sichere Datenübertragung über die serielle Schnittstelle möglich ist, muß dieser Oszillator kalibriert werden. Dies geschieht über einen externen Uhrenquarz (32,768 kHz), Eine kleine Kalibrierroutine sorgt dafür, das die Oszillatorfrequenz auf den von F_CPU vorgegebenen Wert getrimmt wird (via OSCCAL). Als netter Nebeneffekt kann damit die Taktfrequenz des Mikrocontrollers (je nach Serienstreuung) im Bereich von ca. 4 MHz bis ca. 14 MHz eingestellt werden. Viel Spaß! Bert
Hallo bin gerade auf das BertBaord gestoßen Ist das Projekt OpenSource? oder unterliegt es der Beerware Lizenz? Ein supper Projekt danke Gruss Volker
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.